58
4.150.535 2009790 S E T D E S A F Í O E N E Q U I P O Notas para el Profesor sobre Sistemas de Robótica y Copias Maestras para el Set de LEGO # 9790

4.1
50.5
35
2009790
S E T D E S A F Í O E N E Q U I P O
Notas para el Profesor sobreSistemas de Robóticay Copias Maestras para el Set de LEGO # 9790


4.1
50.5
35
2009790
S E T D E S A F Í O E N E Q U I P O
Notas para el Profesor sobreSistemas de Robóticay Copias Maestras para el Set de LEGO # 9790

Índice
Sección 1: Notas para el ProfesorIntroducción
Materiales
El Desafío Dinámico en Equipo
Especificaciones del Área
Cronograma de las 10 Lecciones
Roles para los Miembros del Equipo
Sección 2: Copias Maestras de los EstudiantesCopia maestra 1 ¿Quién es Quien en el Equipo?
2 Sumario y Modelo de Cronograma del Jefe del Equipo
3 Especialista en Comunicación, Ficha de Marketing y de Diario
4 Ficha de Inventario del Especialista en Materiales
5 Reporte del Especialista en Información
6–9 Fichas de Trabajo del Constructor 1–4
10–13 Fichas de Información del Constructor 1–4
14–17 Fichas de Trabajo del Programador 1–4
18–23 Fichas de Información del Programador 1–6
Sección 3: Materiales de SoportePrueba de Entrada y Prueba de Salida
Clave de Respuestas para la Prueba de Entrada y Prueba de Salida
Inventario de Piezas
Ideas Adicionales sobre Desafíos
Referencias Curriculares
Referencias
Distribuido por LEGO System A/S, DK-7190 Billund, DK.
®™ LEGO, MINDSTORMS y el logo de LEGO son marcas registradas del Grupo LEGO.
© 2000 & 2002 Grupo LEGO.
http://www.LEGO.com/education
página 569
111214
página 434445495356
página 171819202122263034

Introducción
Materiales
El Desafío Dinámico en Equipo
Especificaciones del Área
Cronograma de las 10 Lecciones
Roles para los Miembros del Equipo
Sección 1: Notas para el Profesor
página 569
111214

Introducción
En sus manos tiene el proyecto para que su clase organice un Desafío en Equipo. ¡Use este material con mucho cuidado!Mientras trabajen con el equipo del Desafío en Equipo, usteddebe alentar, motivar e involucrar a sus estudiantes en unaexcitante y SERIA DIVERSIÓN.
El Desafío en Equipo es serio porque los estudiantes:
• Trabajarán conjuntamente para lograr una meta común.
• Aplicarán los conocimientos de varias áreas… ¡al mismo tiempo!
• Se comunicarán unos con otros—
Escucharán lo que otros dicen y compartirán sus propias ideas.
Anotarán palabras que otros puedan leer y entender.
• Planearán, organizarán y ejecutarán una tarea dentro de un plazo fijo.
• Ampliarán sus habilidades de programación y pensamiento de unorden más alto.
• Competirán con otros: un encuentro de ingenio y habilidad.
El Desafío en Equipo es divertido porque los estudiantes:
• Aplicarán su propia creatividad e ingenio para resolver un problemadifícil.
• Colaborarán con otros en un proyecto.
• Verán sus ideas en acción.
• Usarán materiales LEGO® y ROBOLAB: ¡algo familiar con la evolución de la tecnología!
• Participarán en un evento competitivo y amistoso.
¡Bienvenido a una Seria Diversión
Trabajando en equipo de cuatro estudiantes, éstos construirán un robotcon piezas LEGO y lo programarán usando el software ROBOLAB. Losrobots son diseñados para realizar una función específica y deben competir con otros robots en un evento diseñado para probar sufuncionamiento. El evento competitivo demostrará cómo el robot trabaja según lo planeado.
El Maletín del Desafío en Equipo incluye un proyecto para organizar su clase e iniciar una actividad exitosa.
Las siguientes páginas proporcionan la descripción de un desafíoespecífico, Desafío Dinámico en Equipo, el cronograma respectivo,especificaciones del evento, roles de equipo para losestudiantes, copias maestras para la construcción, programación para losrobots y otros materiales de apoyo.
¡Disfrute la SERIA DIVERSION del Desafío en Equipo!
¿Qué es el Desafío en Equipo?
5PÁGINA
Las copias maestrasfueron hechas para losequipos de estudiantes.Trate de no formarequipos de más decuatro personas.
El Maletín del Desafíoen Equipo ROBOLABasume que su claseconoce el softwareROBOLAB requerido, elhardware del RCX yTransmisor de RayosInfrarrojoscorrespondientes.

Maletín del Desafío en Equipo 9790
El Maletín del Desafío en Equipo es un maletín de construcción para un grupo de 4 estudiantes. Cada maletíntiene alrededor de 700 piezas tales como engranajes, motores, cables conectores y sensores de contacto y luz.Además incluye lo siguiente:
1 RCX 1 Transmisor de Rayos Infrarrojos 1 Cable (para Macintosh o PC)
Se requiere un Set para cada grupo. (Asuma que cada equipo necesita una computadora).
Materiales 1 de 36
PÁGINA
Aprendiendo Progresivamente
El Maletín del Desafío en Equipo es parte del sistema de materiales de aprendizaje LEGO Educational Division. El Maletín de Desafío enEquipo de es la continuación del Set Inicial de Robótica. Esto suponeque los estudiantes ya saben cómo construir con el RCX™ y programarusando el software ROBOLAB.
9780
SET INICIAL
MEJORAS9790
MALETÍN DEL DESAFÍOEN EQUIPO
MALETINES DEPROYECTOS
Para mayor información,visite nuestra Página Web:www.LEGO.com/education
Si ROBOLAB es nuevo para los estudiantes, siga una de las siguientes indicaciones antes de empezar el trabajo del Desafío en Equipo.
1) Use el Set Inicial para introducir a los estudiantes en las habilidades de construcción y programación del ROBOLAB.
o,
2) Compre el software por separado, luego instale el software ROBOLAB.A continuación, siga las indicaciones del video para instalar y probar elhardware. Para introducir a los estudiantes en la programación use laGuía del Profesor para el Software ROBOLAB. Haga que los estudiantesconozcan la Constructopedia de Subensambles del Desafío en Equipo9790 y ajuste la programación para permitir que los estudiantes tenganmás tiempo de construcción durante el desafío.
PC
Macintosh

Materiales 2 de 37
PÁGINA
La Constructopedia de Subensambles incluye dibujos para ayudar a losestudiantes a pensar en formas para resolver los desafíos. Los estudiantesescogen entre los subensambles y luego buscan formas adicionales paracompletar sus robots en Ideas para Ruedas y Movimiento y en Ideas paraConectar Sensores (páginas 29 y 30)
Notas:
• La Constructopedia de Subensambles incluye instrucciones de construcción para grúas y mecanismos giratorios. Estos mecanismosrequieren una parte adicional: la caja amarilla de engranaje. Esta caja de engranaje amarilla está incluida en el popular maletín de MáquinasSimples y Motorizadas 2009645.También se puede comprar porseparado. Contacte a su distribuidor para mayor información.
•Este icono indica que los estudiantes deben dejar de construir y probarlo que han construido.
Constructopedia de Subensambles
?
Las Notas para el Profesor y Copias Maestras del Maletín de Desafío enEquipo son un paquete de materiales introductorios y copias maestraspara estudiantes. (¡Ud. está leyéndola en este momento!). Incluyeinformación detallada para Desafío Dinámico en Equipo,descripciones y especificaciones para los desafíos adicionales.
Notas para el Profesor y Copias Maestras del Maletín de Desafío en Equipo
4.1
50.5
35
2009790
S E T D E S A F Í O E N E Q U I P O
Notas para el Profesor sobreSistemas de Robóticay Copias Maestras para el Set de LEGO # 9790

¿Quién obtiene qué y cuándo?
A continuación le presentamos una lista de las copias maestras.
De la Sección 1 Descripción del Desafío Dinámico en Equipo y las Reglas de laCompetencia (página 9)
Reglas Alternativas (página 10)
Especificaciones del Área y Cómo Hacer el Área, (página 11)
Copia Maestra1 ¿Quién es Quien en el equipo?
2 Modelo de Cronograma del Jefe del Equipo y Sumario
3 Especialista en Comunicación, Ficha de Marketing y de Diario
4 Ficha de Inventario del Especialista en Materiales
5 Reporte del Especialista en Información
6–9 Fichas de Trabajo del Constructor 1–4
10–13 Fichas de Información del Constructor 1-4
14–17 Fichas de Trabajo del Programador 1-4
18–23 Fichas de Información del Programador 1-6
Prueba de Entrada y Prueba de Salida, (página 43)
Inventario de Piezas, (páginas 45-47)
Un afiche por clase o por equipo
Uno por equipo, opcional
Uno por equipo, opcional
Todos los estudiantes
Jefe del Equipo
Especialista en Comunicación
Especialista en Materiales
Especialista en Información
Una copia para cada equipo
Una copia para cada equipo
Una copia para cada equipo
Una copia para cada equipo
Todos los estudiantes
Opcional, para el Especialista enMateriales
De la Sección 2
De la Sección 3
Materiales 3 de 3 8
PÁGINA

El Desafío Dinámico en Equipo es la "Misión de Entrenamiento"para desafíos de robótica. Está descrita en detalle en las siguientes páginas. Úselo si es la primera vez que intenta unDesafío en Equipo con su clase. Éste sirve para construir y programar un robot que puede retirar la mayor cantidad delatas de un área determinada en dos minutos.
Descripción
Reglas de la Competencia
1) Los robots empiezan desde el Área de Partida mirando hacia el centro delcírculo.El sensor de luz puede estar colocado sobre el Área de Partida en elborde del círculo.
2) Los robots pueden empujar, levantar, patear, remover, rodar o lanzarlatas fuera del círculo.
3) Se considera que una lata está "fuera" en el momento en que está completamente fuera del límite del círculo.
4) Si alguien toca el robot durante un turno será descalificado y no podráfinalizar el resto del turno.
5) Los robots pueden usar el área fuera del círculo sólo para dar la vuelta.
6) Cada turno dura exactamente dos minutos. Cuando termine el turnodel robot se detendrá y se contarán todas las latas fuera del límite del círculo. Ésta será la puntuación para dicho turno.
7) Si un robot se queda fuera del límite del círculo por más de 30segundos, el turno termina. Se cuentan las latas que ya fueron empujadashacia fuera. Ésta será la puntuación para dicho turno.
8) De común acuerdo, un Desafío en Equipo puede comprender de 1 a 3turnos, promediándose las puntuaciones.
9) Todos los robots deben usar sólo elementos LEGO® que se encuentran en el maletín del Desafío en Equipo 9790 para loscomponentes funcionales (partes movibles). Sin embargo, se puedenusar otros materiales para decorar los robots (tales como papel, tela)..
Revise la sección deReglas Alternativas en lasiguiente página paraencontrar ideas quevaríen la dificultad deldesafío.
El Desafío Dinámico en Equipo 1 de 29
PÁGINA

El Desafío Dinámico en Equipo 2 de 210PÁGINA
Reglas de Precisión
Son las mismas que las reglas de la competencia principal, excepto quese cuentan las latas que se mantienen en pie después de ser puestas fueradel círculo.
Reglas de Ojos BrillantesSon las mismas que las reglas de la competencia principal, excepto que elrobot debe empezar con el sensor de luz dentro del Área de Partida.
Reglas de SumoSon las mismas que las reglas de la competencia principal, excepto quesólo se usan latas llenas y sin abrir.
Reglas del AcaparadorSon las mismas que las reglas de la competencia principal, excepto quesólo se cuentan las latas que el robot recoge y almacena.
Reglas del Buscador de PuertasSon las mismas que las reglas de la competencia principal, excepto quelos robots deben colocarse de espaldas a los límites del círculo dentro del Área de Partida de espaldas al borde del círculo. Cada robotdebe encontrar el borde del círculo antes de dejar el Área de Partida yempujar las latas.
Reglas del Robot EmpujalatasSon las mismas que las reglas de la competencia principal, excepto quesólo se cuentan las latas que son empujadas dentro del Área de Partida.
NIVEL 2
NIVEL 1
NIVEL 3
Reglas Alternativas
NIVEL 4
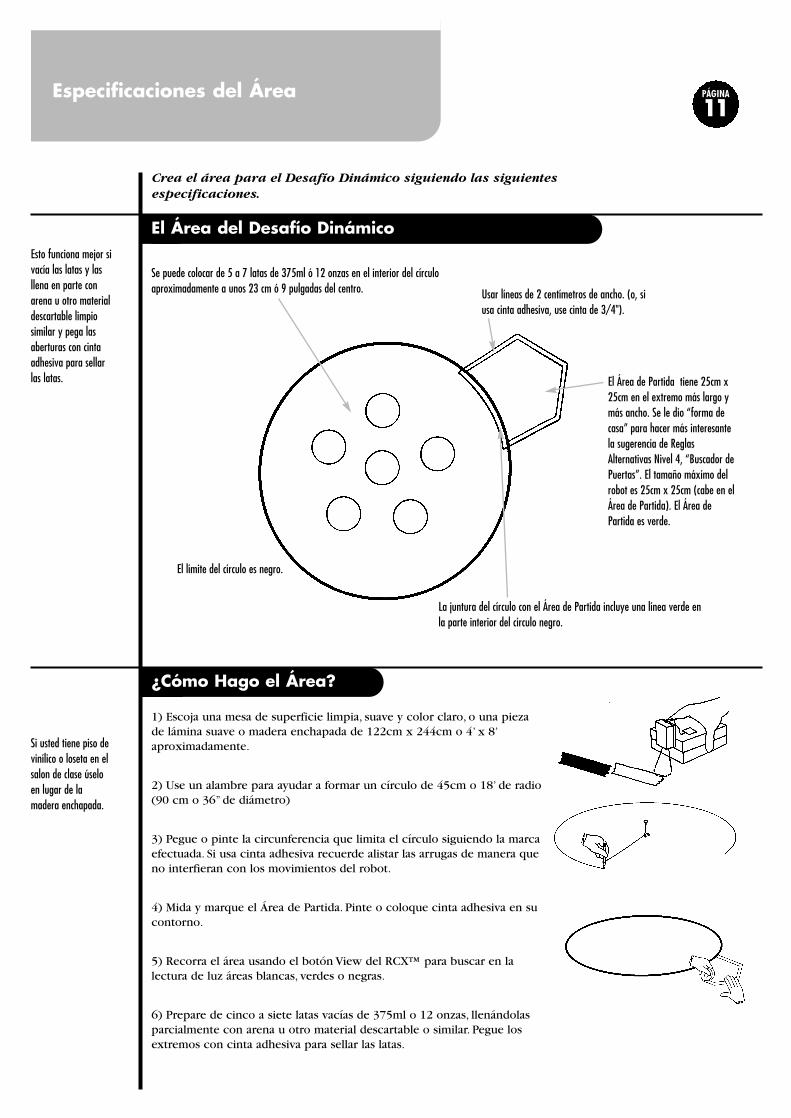
Se puede colocar de 5 a 7 latas de 375ml ó 12 onzas en el interior del círculo aproximadamente a unos 23 cm ó 9 pulgadas del centro. Usar líneas de 2 centímetros de ancho. (o, si
usa cinta adhesiva, use cinta de 3/4").
El límite del círculo es negro.
El Área de Partida tiene 25cm x25cm en el extremo más largo ymás ancho. Se le dio “forma decasa” para hacer más interesantela sugerencia de ReglasAlternativas Nivel 4, “Buscador dePuertas”. El tamaño máximo delrobot es 25cm x 25cm (cabe en elÁrea de Partida). El Área dePartida es verde.
La juntura del círculo con el Área de Partida incluye una línea verde enla parte interior del círculo negro.
El Área del Desafío Dinámico
Crea el área para el Desafío Dinámico siguiendo las siguientesespecificaciones.
Especificaciones del Área11PÁGINA
Esto funciona mejor sivacía las latas y lasllena en parte conarena u otro materialdescartable limpiosimilar y pega lasaberturas con cintaadhesiva para sellarlas latas.
¿Cómo Hago el Área?
1) Escoja una mesa de superficie limpia, suave y color claro, o una piezade lámina suave o madera enchapada de 122cm x 244cm o 4’ x 8’aproximadamente.
2) Use un alambre para ayudar a formar un círculo de 45cm o 18’ de radio(90 cm o 36” de diámetro)
3) Pegue o pinte la circunferencia que limita el círculo siguiendo la marcaefectuada. Si usa cinta adhesiva recuerde alistar las arrugas de manera queno interfieran con los movimientos del robot.
4) Mida y marque el Área de Partida. Pinte o coloque cinta adhesiva en sucontorno.
5) Recorra el área usando el botón View del RCX™ para buscar en la lectura de luz áreas blancas, verdes o negras.
6) Prepare de cinco a siete latas vacías de 375ml o 12 onzas, llenándolasparcialmente con arena u otro material descartable o similar. Pegue losextremos con cinta adhesiva para sellar las latas.
Si usted tiene piso devinílico o loseta en elsalon de clase úseloen lugar de lamadera enchapada.

Antes de empezar el Desafío en Equipo asegúrese de haber configuradoe instalado el software y hardware de ROBOLAB™. Si no conoce losmateriales ROBOLAB, revise "Aprendiendo Progresivamente" en la página de Materiales 1 de 3.
Completar el Desafío Dinámico, un concurso en el cual los robots construidos conmateriales ROBOLAB deben empujar latas de gaseosa fuera del círculo. Los estudiantes trabajarán en equipos para construir, probar, programar ydepurar sus propios diseños de robots. Sus estudiantes tendrán periodos de 10clases para completar el desafío.A continuación un pequeño diseño.
Presente el concepto de aceptar el desafío a cada estudiante.
Haga que los estudiantes completen la Prueba de Entrada.
Deje que los estudiantes jueguen con los materiales del Desafío en Equipo y elsoftware de ROBOLAB individualmente para estimular sus intereses ypensamientos sobre los robots. Para más ideas pueden usar la Constructopedia deSubensambles y la Guía del Profesor para el software ROBOLAB.
Tal vez quiera revisar los conceptos de robótica. El libro de Sistemas de RobóticaLEGO DACTA™ puede ayudarle (el libro no está incluido en el Set del Desafío enEquipo pero si disponible por separado).
Presente el Desafío a toda la clase. Discuta acerca del área o entorno que preparánpara la competencia.
Organice una lluvia de ideas para que los equipos creen un robot para el desafío.Note que hay varias maneras de "hacerlo correctamente".Tal vez desee sugerir dosestrategias para empezar. La copia maestra para estudiantes le sugiere las páginas dela constructopedia de Subensambles para estas dos estrategias.
1) Optimizando la maniobrabilidad del robot mediante la construcción de un chasisde dos motores para girar mejor.
2) Optimizando el control sobre las latas mediante la construcción de chasis de unmotor con un mecanismo motorizado para agarrar cosas.
Distribuya la ficha ¿Quién es Quien en el Equipo? y discuta los roles del equipo. Pidaa los estudiantes que llenen la ficha individualmente y la devuelvan. Use las respuestas de esas fichas así como su propio conocimiento sobre los estudiantespara dividirlos en equipos y escoger roles para cada uno.
Distribuya la copia maestra Especificaciones del Área, y empiece a preparar el área.Si pinta de blanco la superficie del área, hágalo en este día para que tenga tiempo desecarse antes de hacer el Límite del Círculo o el Área de Partida.
Termine de hacer el área oficial.
Divida la clase en equipos.
Regrese la ficha ¿Quién es Quien en el Equipo? a cada estudiante y asígneles losroles específicos. ¡Firme las fichas para hacerlas oficiales! Discuta los roles y cómocada persona debe relacionarse con sus compañeros de equipo.
Distribuya las fotocopias de la copia maestra apropiada a los miembros de equipo yrevise el propósito de cada una.Aproveche esta oportunidad para verificar que todoslos estudiantes entiendan lo que espera de los reportes y de las otras fichas de trabajo.
A continuación, discuta las posibles estrategias para el Desafío Dinámico en Equipo.La clase usará el tiempo para sugerir ideas para enfrentar el desafío.Al final de estedía cada equipo debe haber decidido el subensamble de su proyecto con el cualempezarán a construir su robot.
DÍA 2
DÍA 1
DÍA 3
La Misión
Cronograma de las 10 Lecciones 1 de 2 12
PÁGINA
Si tiene piso de vinílicoo loseta, puede usarlo,no se necesita madera enchapada.

DÍA 8 O 9
DÍAS 4–8
DÍA 9 O 10
Finalmente, los equipos revisan la construcción diaria y la tabla de programación.Los equipos se subdividen en constructores y programadores. Ellos necesitandecidir quién construirá y quién programará al inicio del día 4. Al final de estedía los equipos deben asegurarse que todos tengan las Fichas de Trabajo y de información apropiadas y que entiendan cómo procederán. Ésta es una buenaoportunidad para que resuelvan cualquier problema que tengan con los roles, losobjetivos y métodos para completar el desafío por si mismos.
Durante estos 4 ó 5 días los estudiantes diseñarán, construirán y programarán losrobots de sus equipos. Cada estudiante debe trabajar a una actividad específicacada día. Ningún estudiante debe esperar que otro miembro del equipo termineuna tarea para empezar a trabajar.Todos trabajan todo el tiempo. Como facilitador, usted estará presente para manejar situaciones problemáticas.Apartede responder preguntas específicas, permanezca a un lado y deje que losestudiantes tomen sus propias decisiones.
Mientras los estudiantes cumplen sus roles y actúan como constructores yprogramadores, deben usar las fichas de información y otras Fichas de trabajopara seguir su progreso. Revise la sección de las copias maestras de este material para hacer fotocopias.
Permita algún tiempo a los estudiantes para que anuncien la competencia a otrasclases y a la comunidad. Hacer publicidad y promover los eventos proporcionaotra oportunidad para hacer el desafío relevante para el "mundo real". Anunciarla competencia trae emoción… hasta para los estudiantes que lo están creando.Revise la Ficha de Información del especialista en Comunicación en la secciónde copias maestras de este material.
Al final del Día 8 ó 9, haga que los estudiantes llenen la Prueba de Entrada.
¡Tiempo de la Competencia! Cada equipo controla sus robots en el área oentorno de la Competencia. Se tabulan las puntuaciones y se anuncian los resultados.
Asegúrese que todos completen sus diarios al comienzo del Día 10. Luego hagaque la clase discuta los procesos y resultados del Desafío en Equipo.
Al final del Día 10 haga que los estudiantes completen la Prueba de Salida.
DÍA 3CONTINUACIÓN
Cronograma de las 10 Lecciones 2 de 2 13
PÁGINA
Tal vez deseacontinuar al final deldía 7 en vez del día 8.

A continuación lea la descripción de los roles para los miembrosdel equipo. Luego, divida a los estudiantes por lo menos en dosequipos. Los equipos trabajan mejor con cuatro estudiantes.
Cada grupo debe usar el Maletín del Desafío en Equipo ROBOLAB™ 9790 y las copias maestras entregadas. Cualquiermaterial adicional como papel está a discreción del profesor ydebe estar disponible por igual para todos los grupos.
Todos los estudiantes construyen y programan el robot para el concurso. Sinembargo, para poder terminar el robot a tiempo, se deben compartirresponsabilidades adicionales. Por eso, cada equipo está formado porestudiantes con estos roles, que son asignados al comienzo del proyecto yusualmente son mantenidos (a discreción del profesor) hasta que elproyecto termine. Para ayudar a determinar qué estudiantes cumplirán cadarol, haga que cada uno llene la copia maestra ¿Quién es Quien en el Equipo?
Supervisa las actividades del equipo diariamente.
Asegura que el proyecto avance según el horario.
Cuando surge una discusión, negocia un consenso entre los miembros delequipo para determinar cómo proceder.
Registra el trabajo del día en el diario del equipo.
Organiza los anuncios y el marketing del "Gran Día" del concurso con losEspecialistas en Comunicación de otros equipos.
Explica cualquier inquietud o pregunta del equipo al Jefe.
Le sigue la pista al uso de todo el hardware, software, elementos deconstrucción y otros materiales.
Distribuye materiales y pedidos adicionales de materiales, si es necesario.
Mantiene el inventario y se asegura que todos almacenen los materialesapropiadamente. (TODOS los miembros del equipo deben tomar parte enla limpieza)
Resume la información para el proyecto e incluso lee al equipo nuevainformación en voz alta, asegurándose que las fichas de información y de trabajo y otra literatura estén en orden.
Proporciona diariamente informes sobre el estado del proyecto. (verbaly/o escritos).
Adicionalmente a las responsabilidades descritas anteriormente, todos los estudiantes en el equipo también son constructores o programadores.Estos dos grupos dentro de cada equipo pueden cambiar responsabilidades de un día a otro.
JEFEDEL EQUIPO
ESPECIALISTA EN
COMUNICACIÓN
ESPECIALISTA EN
MATERIALES
ESPECIALISTA ENINFORMACIÓN
¿Quién es Quien en el Equipo?
CONSTRUCTORES YPROGRAMADORES
JEFE DEL EQUIPO
ESPECIALISTA ENMATERIALES
ESPECIALISTA ENINFORMACION
CONSTRUCTOR
ESPECIALISTA ENCOMUNICACIÓN
PROGRAMADOR
Roles para los Miembros del Equipo14PÁGINA

Copia maestra 1 ¿Quién es Quien en el Equipo?
2 Sumario y Modelo de Cronograma del Jefe del Equipo
3 Especialista en Comunicación, Marketing y Ficha de Diario
4 Ficha de Inventario del Especialista en Materiales
5 Reporte del Especialista en Información
6–9 Fichas de Trabajo del Constructor 1–4
10–13 Fichas de Información del Constructor 1–4
14–17 Fichas de Trabajo del Programador 1–4
18–23 Fichas de Información del Programador 1–6
Sección 2: Copias Maestras del Estudiante
página 171819202122263034


Instrucciones: A continuación lee la descripción de los roles.Luego escribe un párrafo describiendo qué rol prefieres ypor qué crees que harías un buen trabajo.
Eres encargado de supervisar a todo el equipo y asegurarte que elproyecto se lleve a cabo según lo programado. Eres responsable deencontrar una solución entre los miembros del equipo cuando surgenproblemas.
Eres encargado de escribir el diario del equipo todos los días.Ademásmanejas la publicidad y marketing para el "Gran Día" del concurso.Cualquier información de tu equipo sale a través tuyo.
Eres responsable de mantener un seguimiento de todo el hardware,software y elementos de construcción.Tú distribuyes el material alcomienzo de la clase y te aseguras que todos ordenen al final. Si alguienen el equipo necesita nuevo material ella o él recurren a ti.
Cuando cualquier información llega al equipo (como una ficha de trabajoo de información) tú eres el encargado de leerla en voz alta o resumirla.También eres responsable de informar el estado del proyecto al Jefe deEquipo todos los días. Si alguien necesita información especial orespuestas, ella o él recurren a ti.
JEFEDEL EQUIPO
ESPECIALISTA ENCOMUNICACIÓN
¿Para qué rol crees que estás mejor preparado? ¿Por qué?
ESPECIALISTA ENMATERIALES
ESPECIALISTA ENINFORMACIÓN
Rol Escogido
Me comprometo a cumplir fielmente mis deberes durante todo elconcurso Desafío en Equipo.
Firma del estudiante
Firma del profesor
Nombre
Clase
Fecha
¿Quién es Quien en el Equipo?
Copia Maestra
1
Corta y firma elsímbolo quecorresponde al rolque escogiste (veresquina superiorderecha) y al rol de Constructor oProgramador.
JEFE DEL QUIPO
ESPECIALISTA ENMATERIALES
ESPECIALISTA ENINFORMACION
ESPECIALISTA ENCMUNICACION
Además de cada unode los roles descritos,cada uno es tambiénun constructor oprogramador.
CONSTRUCTOR
PROGRAMADOR

PROGRAMADOR
CONSTRUCTOR
Construyendo el Cuerpo. Construye y prueba el subensamble que han escogido.Discútelo con los Programadores.
Moviendo y Volteando. Agrega ruedas o un sistema tipo oruga y pruébalos.Aumenta o disminuye la velocidad. Usa el sensor paraactivar el movimiento. Discútelo con losProgramadores.
Viendo y Sintiendo.Coloca el sensor de luz y el(los) sensor(es) decontacto y pruébalos. Discútelo con losprogramadores.
Prueba Final. Trabaja con los Programadores. Baja el programa finaly pruébalo. Se permiten cinco minutos de prueba enel "área real" para "ajustar" el funcionamiento delrobot.
El Gran Evento
DÍA 4
DÍAS 5–6
¿Construir y Programar un Robot en sólo 4 días? ¿Cómo? ¡Trabajo en Equipo!
DÍAS 7–8
DÍA 8 O 9
Recursión y Carga. Crea programas que se repitan o que estén enrecursión y bájalos al RCX™. Usa sonidos en vez demotores para probar los resultados. Discútelo con losConstructores.
Luz y la Línea.Usa el sensor de luz y actívalo con la prueba de líneanegra para verificar el programa. Discútelo con losConstructores.
Tocar e Irse. Prueba el programa usando los sensores de contacto yde luz. Discútelo con los Constructores.
Prueba Final. Trabaja con los Constructores. Baja el programa finaly actívalo. Se permiten cinco minutos de prueba en el"área real" para "ajustar" el funcionamiento del robot..
El Gran Evento
Cada equipo incluye: un Jefe, un Especialista en Comunicación, un Especialista enInformación y un Especialista en Materiales. Estos roles permanecen iguales a lo largo delconcurso Desafío en Equipo. Sin embargo, a la par que mantienen los primeros roles, cadapersona debe ser también un Constructor o un Programador. Los estudiantes pueden cambiarde ser Constructores a Programadores si los miembros del equipo acceden al cambio. ComoJefe de Equipo es tu responsabilidad asegurarte que el equipo no se retrase.
DÍA 9 O10
Revisa la situación con el Especialista de Información.Compárala con el cronograma antes mencionado.
Verifica el Progreso de tu Equipo
Constructor Programador
Nombre
Clase
Fecha
Sumario y Modelo deCronograma del Jefe de Equipo
Copia Maestra
2
Pregunta Respuesta
• Reúnete con el equipo.
• ¿Quiénes son los constructores hoy día?
• ¿Quiénes son los programadores hoy día?
• ¿Qué se debe lograr al final del día?
• ¿Hay alguna pregunta para el profesor? (Anótalas a continuación).

Afiches
Volantes
Anuncios dirigidos al público
Cintas de video
Páginas Web
Periódicos locales
Promoviendo el Gran Evento: El Desafío en Equipo
Es tu trabajo anunciar el evento del Desafío en Equipo y escribirel Diario del Equipo. Usa esta ficha para sacar algunas ideas.
Recuerda incluir la fecha yhora del evento y algo deinformación sobre elDesafío en Equipo. Enalgunos casos tal vezdesees incluir una lista delos competidores del roboty de los miembros delequipo.
Nombre
Clase
Fecha
Especialista en Comunicación, Ficha de Marketing y de Diario
Copia Maestra
3
¿Qué logró tu equipo hoy día?
¿Qué problemas encontró tu equipo hoy día?
¿Qué soluciones intentó tu equipo?
Otros comentarios.
Actividades del Día
Considera estas preguntascuando escribas elresumen.

Latas
Materiales de Computadora
Materiales de Construcción
Maletín de Construcción del Desafío en Equipo 9790
Materiales Decorativos
Otros Materiales
Determinados por elprofesor
Area de prueba (cinta verde y negra opintura en la superficie blanca o papel)
Es tu trabajo seguir la pista de todos los materiales. Coloca un visto bueno cada día si todo estácorrecto.
Revisa el inventario depiezas en el Maletín deConstrucción paramayores detalles acercade cómo se almacenan laspiezas para conocer elnombre de las piezas, usala ficha de inventario de laGuía.
1 RCX™ 1 Transmisor de Rayos Infrarrojos 1cable (para Macintosh o PC)
Nombre
Clase
Fecha
Ficha de Inventario delEspecialista en Materiales
Copia Maestra
4
También necesitarás elCD-ROM del softwareROBOLAB™
PC
Macintosh¿Está conforme?
Cada día

DÍAS 1-3
DÍA 4
DÍA 5
DÍA 6
DÍA 8
Reporte
Tú eres responsable de reportar el estado del proyectoal Jefe el Equipo cada día. ¿Cómo ha progresado elequipo?
DÍA 10
El Gran Evento
Nombre
Clase
Fecha
Reporte del Especialistaen Información
Copia Maestra
5
DÍA 7
DÍA 9

CONSTRUCTOR
SUGERENCIAS COMENTARIOS
Día para Construir el Cuerpo: Construyendo y Probando el Subensamble
1
2
3
4
5
6
NUESTRO EQUIPO HA:
7
8
Decidido qué subensamble usar.
Decidido qué estrategia queremosintentar primero para retirar laslatas.
HOY DÍA
LOS CONSTRUCTORES:
Encontrarán los planos para elsubensamble escogido.
Construirán el subensamble y leconectarán los motores.
Verificarán el subensamble a mano yla construcción para asegurarse quees resistente.
Probarán los motores con elPrograma Incorporado 1 en elRCX™.
Mostrarán a los programadores loque se ha hecho.
Haremos mejoras al subensamble.
Decidido qué roles debemos tener.
Las instrucciones de laConstructopedia de Subensamble seincluyen en el maletín del Desafíoen Equipo ROBOLAB™ 9790.
Usa el RCX. Presiona el botón Pgrmpara escoger el programa 1 PresionaRun.
Coloca un vistobueno en elcírculo al terminar.
Y SI TENEMOS TIEMPO:
9
Constructopedia de Subensamble:Para una mejor maniobrabilidad, verel "chasis de un auto de dos ruedas"(páginas 4-6); para un mejor controlde las latas ver el "chasis de soportey giro de un motor", (páginas 7-9) yel "mecanismo de agarre",(páginas 17-18).
Nombre
Clase
Fecha
CONSTRUCTORFicha de Trabajo 1 de 4
Copia Maestra
6

SUGERENCIAS COMENTARIOS
Moviendo y Girando: ¡Deja a La Luz Empezar Alguna Acción!
1
HOY LOS CONSTRUCTORES:
Coloca un vistobueno en elcírculo al terminar.
Con los programadores conectaránel sensor de luz al Puerto 2 delRCX™ y el(los) motor(es) al PuertoA (y Puerto C).
2 Con los Programadores seleccionaránel Programa Incorporado 3 y loactivarán. Experimentarán con elsensor de luz en un área de pruebapara activar el(los) motor(es).
3 Probarán al menos doscombinaciones de ruedas (usandoel Programa Incorporado 1 ó 3).Encontrarán la combinación quetenga la velocidad más manejable.
4 Además probarán las ruedas paraver cuáles giran mejor. Cambiarán ladirección del motor girando el cableconector 180°.
5 Encontrarán una manera paraconectar el sensor de luz al robotcon ruedas de manera que puedareconocer las líneas del área deprueba apropiadamente.
6 Probarán cómo circula y gira almismo tiempo usando el nuevoprograma de los Programadores.
7 Experimentarán cambiando laposición de los engranajes paraajustar la velocidad del robot o lapotencia (fuerza).
7
Y SI TENEMOS TIEMPO:
8 Probaremos el robot haciendo queavance en línea recta y gire otra vezen el área de prueba para arreglarcualquier falla mecánica y problemasde calibración de tiempo.
Revisa la Ficha de Información sobreConstrucción 1 de 4.
Revisa la Ficha de Informaciónsobre Construcción 1 de 4. Si elrobot se detiene mientras gira,intenta colocando el RCX sobre eleje de conducción.
Revisa la Ficha de Información sobreConstrucción 3 de 4.
Revisa la Ficha de Información sobreConstrucción 1 de 4.
Enciende el RCX. Presiona el botónPrgm para seleccionar el Programa3. Presiona el botón Run.
CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTORFicha de Trabajo 2 de 4
Copia Maestra
7

SUGERENCIAS COMENTARIOS
Recogiendo Latas: ¡Directo Hacia la Línea!
1
HOY LOS CONSTRUCTORES:
Coloca un vistobueno en elcírculo al terminar.
Con el Programador conectarán unsensor de contacto al Puerto 1 delRCX™, encenderán el RCX ypresionarán el sensor para ver elpequeño triángulo indicador enla pantalla del RCX.
2 Diseñará formas para que el robotrecoja las latas a medida que sedesplaza.
3 Probará algunos de los diseños conuna lata de verdad en el área deprueba. Usará el programa bajadoen el trabajo anterior.
4 Colocará el sensor de contacto en elrobot de manera que "sienta" la lataal mínimo contacto.
5 Probará el robot con el nuevoprograma de los Programadores quecombina el sensor de contacto conel funcionamiento recoge-latas.
6 Verificará el diseño del robot. Seasegurará que cualquier mecanismopara coger o patear esté colocado demanera que el sensor de contactopueda sentir la lata primero.
7 Ajustará la posición del RCX paraoptimizar el balance sobre el ejeprincipal del robot. Las partes máspesadas del robot significan mayorfricción y acciones más lentas.
8
El programa anterior debe guardarsecomo Programa 5 en el RCX.
Revisa la Ficha de Información parael Constructor 3 de 4.
Revisa la Ficha de Información parael Constructor 3 de 4.
Revisa la Ficha de Información delConstructor 2 de 4. Recuerda queel tamaño máximo del robot es de25cm x 25cm (aproximadamente10" x 10").
Probaremos el robot en el Área de lacompetencia verdadera con latasreales por algunos minutos para versi hay algún problema mecánico ode tiempo.
CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTOR Ficha de Trabajo 3 de 4
Copia Maestra
8

SUGERENCIAS COMENTARIOS
Ajustando y Decorando: ¡Un Robot Confiable con Verdadero Estilo!
1
HOY EL CONSTRUCTOR:
Coloca un vistobueno en elcírculo al terminar.
Verificará con los Programadores que elrobot de todos modos funcioneapropiadamente usando los Programasbajados a los campos de almacenamiento 4y 5. Pruébalos con una lata en el área deprueba.
2 Diseñará y construirá decoracionesespeciales para darle al robot unaapariencia única y emocionante.Cuida de no exceder el límite de los25cm cuadrados (10").
3 Decidirá con los Programadoressobre las acciones especiales queel robot también puede hacer,¡y cuándo hacerlas para agregarlasal singular estilo del robot!
4 Probará toda la decoración ocaracterística para asegurarse queno reduzca la habilidad del robotpara recolectar latas.
5 Probará el robot en el área decompetencia real con todas las latas.
6 Verificará finalmente que todas lasbaterías estén en buen estado parael ¡Gran Evento!
7
7 Probaremos el robot en el área decompetencia real un minuto cadavez, tantas veces como puedas.
Revisa las Fichas de Informaciónpara el Programador 3 y 4 de 6.
Revisa las Fichas de Informaciónpara el Programador 5 y 6 de 6.
Revisa las Fichas de Informaciónpara el Constructor 4 de 4.
Y SI TENEMOS TIEMPO:
7
CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTORFicha de Trabajo 4 de 4
Copia Maestra
9

CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTORFicha de Información 1 de 4
Copia Maestra
10
Tenga Agarre al Piso?Sistema Tipo Oruga Ruedas Anchas
¿Cómo Puedo Hacer que Mi Robot...
Vaya más Rápido?Engranaje Multiplicador Ruedas Grandes
Vaya más Despacio?Engranaje Reductor Ruedas Pequeñas
Maniobre?Deslizador Rueda de Dirección

CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTOR Ficha de Información 2 de 4
Copia Maestra
11
Patee las Latas?
Empuje las Latas?
¿Cómo Puedo Hacer que Mi Robot...
Coja las Latas?

CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTORFicha de Información 3 de 4
Copia Maestra
12
Sienta las Latas?Estos parachoques usan un sensor de contacto.
Revisa con los Programadores una idea deprograma muestra para probar los parachoques.
Este par de sensores pueden detectar que lado delrobot es tocado por la lata.
Vea las Líneas?Conecta el sensor de luz al Puerto 2.
Usa cinta adhesiva negra y verde para hacer el áreade prueba sobre papel blanco.
¿Cómo Puedo Hacer que Mi Robot...

CONSTRUCTOR
Nombre
Clase
Fecha
CONSTRUCTORFicha de Información 4 de 4
Copia Maestra
13
Brazos y Pinzas?
¿Cómo Puedo Hacer que Mi Robot Luzca Bien Añadiéndole...
Alas?
Una Cara?
Decoraciones?
Antenas?
Un Ojo?
Dibuja tus propiasdecoraciones. Córtalosy pégalos a tu robot.

SUGERENCIAS COMENTARIOS
Recursión y Carga: Conociendo el RCX Otra Vez
1
2
3
4
5
6
NUESTRO EQUIPO HA:
7
8
9
Decidido qué subensamble usar.
Decidido qué estrategia queremosintentar primero para retirar laslatas.
HOY DÍA EL GRUPO DE LOS
PROGRAMADORES:
Probarán el RCX™ para ver si secomunica con el Transmisor deRayos Infrarrojos.
Irán al nivel del Inventor 3 deROBOLAB™ y borrarán el programamuestra de la pantalla.
Harán un programa simple al menoscon dos sonidos, lo bajarán al campode almacenamiento del Programa 4del RCX, y activarán el programa.Guardarán el programa comoSonidos 1.
Harán que el programa sea recursivo almenos con dos sonidos, lo bajarán alcampo de almacenamiento del Programa4 del RCX y lo activarán.
Harán que el programa sea recursivocinco veces con sonidos, lo bajarán alcampo de almacenamiento del Programa4 del RCX, y lo activarán.
Mostrarán a los Constructores quées lo que hemos hecho.
Y SI TENEMOS TIEMPO:
Experimentaremos con diferentessonidos y haremos tonadasconocidas usando recursiones.
Decidido qué roles tendremos.
10
Revisa la Guía del Profesor para elsoftware ROBOLAB, página 10.
Revisa la Guía del Profesor para elsoftware ROBOLAB, página 46.
Revisa la Ficha de Información delProgramador 1 de 6.
Revisa la Ficha de Información delProgramador 1 de 6.
Revisa la Ficha de Información delProgramador 1 de 6.
Coloca un vistobueno en elcírculo al terminar.
Nombre
Clase
Fecha
PROGRAMADORFicha de Trabajo 1 de 4
Copia Maestra
14
PROGRAMADOR

SUGERENCIAS COMENTARIOS
¿Ves esa Línea? ¡Cambia la Dirección del Motor y Escucha el Sonido!
1
HOY LOS PROGRAMADORES:
Coloca un vistobueno en elcírculo al terminar.
Encontrarán con los Constructoresel sensor de luz y lo conectarán alPuerto 2 del RCX™.
2 Seleccionarán con los Constructoresel Programa Incorporado 3 y loactivarán. Experimentarán con elsensor de luz en un área de pruebapara activar los motores.
3 Presionarán el botón View paraseleccionar el Puerto 2. Mediránlos valores de luz del sensor de luzen el área blanca y la línea verde.
4 Usarán un icono del comandocondicional del sensor de luz paraprogramar dos sonidos, uno para elárea blanca y otro para la líneaverde. Lo guardarán como Sonido 2.Bajaran el Programa 4 y lo probarán
5 Cuando el programa toque los sonidoscorrectos sobre el área de prueba ysobre la línea, agregarán comandos paramanejar y girar los motores. Guardaránel programa como Acción 1. Bajarán elPrograma 5 y lo probarán.
6 Seguirán cambiando los valores de tiempo con los Constructores, bajando yprobando otra vez hasta que el robot seamanejado y hecho girar confiablemente.¡Recuerda guardar tu programa!
Y SI TENEMOS TIEMPO:
7 Usaremos el comando Esperar porTiempo al Azar para variar el ángulode giro inesperadamente. ¿Ayudará ajuntar las latas difíciles de alcanzar?
1
Usa papel blanco y pintura negra yverde o cinta adhesiva para hacer alárea de prueba.
Revisa la Ficha de Información delProgramador 2 de 6.
Revisa la Ficha de Información delProgramador 2 de 6.
Revisa la Ficha de Información delProgramador 2 de 6.Verifica los valores de los sensoresde ángulo y luz si tienes problemas.
Revisa la Guía del Profesor para elsoftware ROBOLAB, página 55.También revisa la Ficha deInformación del Programador 3 y 4de 6.
Nombre
Clase
Fecha
PROGRAMADORFicha de Trabajo 2 de 4
Copia Maestra
15
PROGRAMADOR

SUGERENCIAS COMENTARIOS
Tocar e Irse: Hacièndolo al Sentir
1
HOY LOS PROGRAMADORES:
Coloca un vistobueno en elcírculo al terminar.
Conectarán con los Constructores unsensor de contacto al Puerto 1 delRCX™. Luego encenderán el RCX ypresionarán el sensor para ver la flechaindicadora en la pantalla del RCX.
2 Diseñarán un programa con loscomandos Saltar y Aterrizar paraemitir un sonido cada vez que elsensor de contacto sea presionado. Lobajarán al Programa 4 y lo activarán.Lo guardarán como Toque 1.
3 Abrirán el archivo Acción 1 y loguardarán como Acción 2. Copiaránel programa Toque 1 y lo pegarán enun espacio de Acción 2.
4 Añadirán un icono Multitarea paraconectar la tarea del sensor decontacto a la tarea del sensor de luzde manera que las dos tareas seactiven juntas.Volverán a guardar elprograma. Luego, lo bajarán alPrograma 5 y lo probarán.
5 Decidirán con los constructores, lamejor posición para el sensor decontacto de manera que sienta laslatas con seguridad.
6 Añadirán cualquier acción extra deun motor a la tarea del sensor decontacto si un motor estádisponible para coger o patear lalata.
1Y SI TENEMOS TIEMPO:
7 Probaremos otra vez la calibraciónde tiempos y giros mientras un pesoextra en el robot lo hace ir másdespacio.
1
Revisa la Ficha de Información delProgramador 3 y 4 de 6.
Revisa la Ficha de Información delProgramador 3 y 4 de 6.Tu robot debe evadir las líneas y debeemitir sonidos cuando presiones elsensor de contacto.
Revisa la Ficha de Información delConstructor 3 de 4.
Revisa la Ficha de Información delProgramador 3 y 4 de 6.
Nombre
Clase
Fecha
PROGRAMADORFicha de Trabajo 3 de 4
Copia Maestra
16
PROGRAMADOR

SUGERENCIAS COMENTARIOS
Ajustando y Luciéndose: ¡Un Robot Confiable con Verdadero Estilo!
1
HOY LOS PROGRAMADORES:
Coloca un vistobueno en elcírculo al terminar.
Verificarán con los Constructores que elrobot de todas formas funciona apropiadamente usando los Programas 4y 5 del RCX™. Los probarán con unalata en el área de prueba.
2 Guardarán el programa de Acción 2como Acción 3 en la computadora.
3 Decidirán con los Programadoresacerca de acciones y sonidos especiales que el robot tambiénpuede hacer, y deciden cuando hacerlas para agregarlas a ¡el singular estilo del robot!.
4 Experimentarán con todas lasposibilidades de cambios en unprograma para la Acción 3.Tal vez guardará más ideas comoAcción 4 y 5.
5 Bajarán el programa de acciónadicional al Programa 3 del RCX. NOBORRES los programas 4 y 5.Al finalde este paso, el RCX debe tener 3programas de acción diferentes.
6 Probarán el robot en el área decompetencia real con todas las latas.
7 Comprobarán finalmente que todaslas baterías estén en buenascondiciones para el gran evento
7
Y SI TENEMOS TIEMPOS:
8 Probarán el robot en el área real decompetencia por un minuto, tantasveces como puedan.
Usa papel blanco y pintura negra yverde o cinta adhesiva para hacer alárea de prueba.
¡Cuida de no desperdiciar tiempovalioso para recolectar latas!
Al crear programas separados lacomparación de los robots se hacemás fácil.
¡Asegúrate que las nuevas accionesprogramadas no disminuyan lahabilidad del robot para recoger latas!
Nombre
Clase
Fecha
PROGRAMADORFicha de Trabajo 4 de 4
Copia Maestra
17
PROGRAMADOR

Nombre
Clase
Fecha
PROGRAMADORFicha de Información 1 de 6
Copia Maestra
18
PROGRAMADOR
Repita Alguna Melodía Unas Cuántas Veces?
Enlaza estos iconos en el vacíopara construir una melodía conocida.
¿Cómo Puedo Hacer que Mi Robot...
Baje el Programa 4?Primero, presiona el botón Prgm delRCX™ hasta que aparezca un 4.
Luego haz clic en la flecha Activaren la pantalla de la computadora.
Active y Detenga el Programa?Presiona el botón Run en el RCX para activar el programa seleccionado.
Presiona el botón Run otra vez paradetener el programa.
Ejecute Saltar y Aterrizar en el Modelo de Música Constantemente?

Nombre
Clase
Fecha
PROGRAMADORFicha de Información 2 de 6
Copia Maestra
19
PROGRAMADOR
Me Indique la Cantidad de Luz que el Sensor está Leyendo?Enciende el RCX™. Luego presionael botón View hasta que la flechaseñale al Puerto 2. No necesitasactivar un programa para monitorearlos niveles de luz como éste.
¿Cómo Puedo Hacer que Mi Robot...
Ejecute un Sonido Cuando Vea la Línea?Para probar el sensor de luzconéctalo al Puerto 2, sosténloa la misma altura a la que estaríaen el robot y deslízalo por la líneadel área de prueba.
Ejecute un Sonido Cuando Vea una Línea y Otro Cuando Vea el Área?Para probar el sensor de luz sosténloa la misma altura a la que estaría enel robot y colócalo sobre la línealímite.
Usa el botón View en el RCX paraencontrar el valor de luz correcto.Luego ingresa el valor aquí.
Presiona la tecla Tab para obtenerla herramienta de texto de modoque puedas ingresar el número.
Avance en el Área pero Retroceda Alejándose de la Línea?Este programa supone que estásusando el subensamble de Chasisde un auto de dos ruedas paraconducir y girar. Conecta los motores a los Puertos A y C.El robot se moverá hacia delante pero cuando ve el límite, cambia a reversa y da la vuelta.
Revisa la Constructopediade Subensamble.

Nombre
Clase
Date
PROGRAMADORFicha de Información 3 de 6
Copia Maestra
20
PROGRAMADOR
Sentir con un Sensor de Contacto?El robot permanece quieto hasta queel sensor de contacto es presionado.
¿Cómo Puedo Programar mi Robot para...
Sentir con dos Sensores?El robot hace un sonido diferentecada vez que uno de los sensoresde contacto es presionado. Fíjateque el segundo sensor de contactoestá conectado al Puerto 3.

Nombre
Clase
Date
PROGRAMADORFicha de Información 4 de 6
Copia Maestra
21
PROGRAMADOR
¿Cómo Puedo Programar mi Robot para...
Buscar el Área, Evitar la Línea y Emitir un Sonido Cuando Encuentra una Lata?Este programa asume que estás usando un subensamble de dos motores para girar. La primera tareaes evitar la línea yendo en reversa y luego dando la vuelta por un periodo de tiempo corto al azar.La segunda tarea es emitir un sonido si el sensor de contacto es presionado.
Tú puedes copiar el programa modelo que está en la parte superior de la página en la segunda tarea.
Buscar el Área, Evitar la Línea, Coger la Lata, que Perciba y la Suelte?Este programa asume que estás usando el subensamble de chasis de soporte y giro.
La primera tarea es evitar la línea yendo en reversa usando el subensamble de chasis de soporte y giro.
La segunda tarea es apagar el motor del brazo prensor cuando el sensor de contacto es presionado.El brazo prensor sólo se abre o lo suelta cuando se ha cruzado la línea.

Nombre
Clase
Fecha
PROGRAMADORFicha de Información 5 de 6
Copia Maestra
22
PROGRAMADOR
¿Ver y cambiar a reversa o hacer “Ping Pong”?El robot de dos motores avanza y retrocede rebotando en la línea.También hace un pequeño giro en cada rebote.
¿Qué Trucos le Puedo Enseñar a Mi Robot?
¿Tocar una fanfarria y luego soltar las latas?La primera tarea es hacer sonar un timbre cuando el sensor de contactosea presionado y tocar una fanfarria cuando sea soltado otra vez. Debescompletar la segunda tarea tú mismo.

Nombre
Clase
Fecha
PROGRAMADORFicha de Información 6 de 6
Copia Maestra
23
PROGRAMADOR
¿Qué Trucos le Puedo Enseñar a Mi Robot?
¿Manejar en una curva?En el área blanca un motor tiene más potencia que el otro, de maneraque el robot maneje en una curva. El robot maneja recto cuandove una línea.
¿Buscar la línea más oscura?Este ejemplo asume que estás usando un subensamble de un motor.Primero, el robot ve el filo de la línea. Luego, se mueve una fracción haciadelante para mirar la mitad de la línea. Si es muy clara, el robot da lavuelta para mirar en otro lugar. Si la línea es oscura, el robot avanza, sedetiene y toca un sonido.


Prueba de Entrada y Prueba de Salida
Clave de Respuestas para el Prueba de Entrada y Prueba de Salida
Inventario de Piezas
Ideas Adicionales sobre Desafíos
Referencias Curriculares
Referencias
Sección 3: Materiales de Soporte
página 434445495356


Prueba de Entrada y Prueba deSalida 43
PÁGINA
1. ¿En qué consiste el Desafío Dinámico en Equipo?
Desafiar a todos para hacer algo rápidamente
Construir un robot que empuje la mayoría de latas fuera del círculo
Programar un robot para que de vueltas alrededor de un círculo
Construir algo que funcione
2. ¿Qué hace la unidad RCX™?
Funciona como el cerebro de un robot
Controla los motores
Procesa la información de los sensores
Todo lo anterior
3. El sensor de luz puede usarse:
En los Puertos 1-3
En los Puertos A-C
En cualquier lugar del RCX
Ninguna de las anteriores
4. Los motores pueden usarse:
En los Puertos 1-3
En los Puertos A-C
En cualquier lugar del RCX
Ninguna de las anteriores
5. En Inventor, necesitas tener esto para más de una tarea en unprograma:
Dos iconos de motores
Un icono de Multitarea
Un icono para saltar y otro para Aterrizar
Todo lo anterior
6. Los sonidos pueden agregarse al programa utilizando estosiconos:
Duración Musical
Nota musical
Ejecutar sonido
Los iconos Nota Musical y Ejecutar Sonido
7. Esta persona en el equipo es responsable de construir yprogramar el robot:
Todos.
El Especialista de Materiales
El Jefe de Equipo
Sólo aquellos que saben todo

Ficha de Respuestas de la Prueba deEntrada y Prueba de Salida 44
PÁGINA
1. ¿En qué consiste el Desafío Dinámico en Equipo? Desafiar a todos para hacer algo rápidamente
Construir un robot que empuje la mayoría de latas fuera del círculo
Programar un robot para que de vueltas alrededor de un círculo
Construir algo que funcione
2. ¿Qué hace la unidad del RCX™?
Funciona como el cerebro de un robot
Controla los motores
Procesa la información de los sensores
Todo lo anterior
3. El sensor de luz puede usarse:
En los Puertos 1-3
En los Puertos A-C
En cualquier lugar del RCX
Ninguna de las anteriores
4. Los motores pueden usarse:
En los Puertos 1-3
En los Puertos A-C
En cualquier lugar del RCX
Ninguna de las anteriores
5. En Inventor, usted necesita tener esto para más de una tarea en un programa:
Dos iconos de motores
Un icono de Multitarea
Un saltar y Aterrizar
Todo lo anterior
6. Los sonidos pueden agregarse al programa utilizando estos iconos:
Duración Musical
Nota musical
Ejecutar sonido
Los iconos Nota Musical y Ejecutar Sonido.
7. Esta persona en el equipo es responsable por construir yprogramar el robot:
Todos
El Especialista de Materiales
El Jefe de Equipo
Sólo aquellos que saben todo

Inventario de Piezas 1 de 3
Plancha redonda blanca de 1 x 1
Plancha redondaazul de 1 x 1
Plancha redondanegra de 1 x 1
Plancha grisde 1 x 1
Plancha grisde 1 x 2
Plancha amarillade 1 x 3
Plancha grisde 1 x 4
Plancha grisde 1 x 6
Plancha grisde 1 x 8
Plancha grisde 1 x 10
Plancha verdede 2 x 2
Plancha azulde 2 x 2
Plancha grisde 2 x 2
Plancha agujereada grisde 2 x 4
Plancha amarilla de 2 x 4
Plancha agujereada grisde 2 x 6
Plancha agujereada grisde 2 x 8
Plancha verdede 2 x 8
Plancha grisde 2 x 10
Plancha grisde 6 x 10
Plancha verde deesquina de 3 x 6
Ladrillo redondo negrode 2 x 2
Plancha negra conbase lisa de 2 x 2
Plataforma giratoriaverde/azul de 2 x 2
Plancha redondaazul de 2 x 2
Plancha redondablanca de 2 x 2
Plancha gris concojinete de 2 x 2
Plancha gris condeslizador de 1 x 2
Media viga grisde 5 agujeros
Plancha angulargris de 2 x 2
Faja blanca de 15 mm
Faja negra de 22 mm
Faja azul de 26 mm
Faja amarilla de 33 mm
Ladrillo tejado amarillode 1 x 2
Ladrillo tejado negrode 1 x 2
Ladrillo tejado inversoamarillo de 1 x 2
Ladrillo tejado inversonegro de 1 x 2
Ladrillo tejado verdede 2 x 2
Ladrillo tejado inversonegro de
2 x 3
Ladrillo esquineronegro de 1 x 2 x 2
Ladrillo negrode 2 x 2
Ladrillo verde conarco de 2 x 3
Ladrillo verdede 2 x 4
Ladrillo negrode 2 x 4
Ladrillo negrode 2 x 6
Ladrillo negrode 2 x 8
Ladrillo verde con agujeroestrella de 1 x 2
Ladrillo verdede 1 x 2
Ladrillo amarillode 1 x 2
Ladrillo negrode 1 x 2
Ladrillo negrode 1 x 4
Viga amarillade 1 x 2
Viga negrade 1 x 2
Viga negrade 1 x 4
Viga verdede 1 x 4
Viga negrade 1 x 6
Viga negrade 1 x 8
Viga negrade 1 x 10
Viga negrade 1 x 12
Viga negrade 1 x 16
45PÁGINA

Inventario de Piezas 2 de 3
Eje negro de2 pivotes
Eje negro de3 pivotes
Eje negro de4 pivotes
Eje negro de6 pivotes
Eje negro de8 pivotes
Eje negro de10 pivotes
Eje negro de12 pivotes
Eje transversal con topegris oscuro
Engranaje gris de8 dientes
Engranaje cónico oen bisel gris
Engranaje grisde 16 dientes
Engranaje grisde 24 dientes
Engranaje corona grisde 24 dientes
Engranaje grisde 40 dientes
Cremalleragris
Engranaje tornillo sin fingris oscuro
Cámara diferencialgris oscuro
Excéntricagris
Brazo cortogris
Brazo de palancagris
Manivela gris
Unión con broche depresión macho negro
Conoamarillo
Conoblanco
Azulejo bisagra negrode 1 x 2.5
Gancho para uniónnegro
Elemento de ángulo azul,0 grados
Elemento de ángulo gris,112.5 grados
Rueda de polea pequeñagris
Polea pequeña gris
Rueda de poleagris
Rueda de polea grandegris
Espiga de conexióngris
Espiga larga de conexiónnegra
Espiga de conexión con perillagris
Espiga de conexión de 1.5 mmgris oscuro
Espiga de conexión con ejegris
Espiga de conexiónnegro
Extensión de ejegris
Cojinetegris
Contadorgris
Bloque transversalgris
Contador con 1 agujerotransversal gris
Bloque transversal largogris
Unión para ganchoamarillo
Plancha de 1 x 1 con soportevertical negra
Plancha de 1 x 1 con soportehorizontal negra
Plancha bisagra de1 x 2.5 negra
46PÁGINA

Inventario de Piezas 3 de 3
Parábolablanca
Alas del dragónnaranjas
Viga angularnegra
Viga de doble ánguloamarillo
Tubo espiral medianonegro
Tubo espiral medianoverde
Tubo espiral medianomorado
Tubo flexibleamarillo
Separador de ladrillogris
Llanta amarilla
Llanta para el neumáticochico blanca
Llanta para el neumáticogrande blanca
Llanta para la banda derodamiento blanca
Llanta para el neumáticodelgado blanca
Llantaanillo
Neumático de tractorpequeño negro
Neumático de tractormediano negro
Neumático de tractorgrande negro
Neumático grandenegro
Neumático chiconegro
Neumático delgadonegro
Banda de rodamientonegro
Motor de 9 voltiosgris
Sensor de contactogris
Cable conector corto negro de12.8 cm
Sensor de luzazul
Cable conector largo negro de
128 cm
RCXamarillo/
gris oscuro
Transmisor de rayos infrarrojosnegro/gris oscuro
47PÁGINA


Ideas Adicionales Sobre Desafíos1 de 4
Las siguientes son nueve ideas para otros desafíos. Muchasuniversidades y otras organizaciones auspician eventos de desafíosde robótica (ver página de Referencias). Estas ideas fueron tomadasde la información proporcionada por estas organizaciones.
Apagando Velas
Descripción del DesafíoEl desafío es construir y programar un robot autónomo que localice y extinga lallama de una vela en un espacio y tiempo determinado.
(Precaución: En lugar de una llama grande, haz un agujero en el centro de la mesa ycoloca una linterna potente de manera que ilumine desde el centro. "Apagar la vela"puede significar cubrir la linterna por lo menos un segundo)
Especificaciones del Área de Juego No definidas. Debe incluir una vela encendida, cuya llama tenga al menos varioscentímetros de alto.
Reglas y PuntuaciónLos robots deben funcionar autónomamente. Deben extinguir la llama sólo apagándola. El robot que apague la vela más rápido gana.
Fuente: BEAM Robotics, Mark Tilden, Universidad de Waterloo, Canadá.
Robo Hockey
49PÁGINA
Descripción del DesafíoEl desafío es construir y programar un robot que empuje tapas de botellas, ladrilloso portavasos desde el centro del área hasta la línea meta.
Especificaciones del Área de Juego Una caja de madera enchapada poco profunda. Las dimensiones exteriores tienen 48pulgadas de largo y ancho (122 cm). Los lados tienen 5 _ pulgadas de alto (aproximadamente 14 cm). El fondo de la caja está cortado en dos piezas de aproximadamente 61 x 122 cm. Las dos piezas están inclinadas hacia la mitad. Lainclinación es sólo de 1.25 cm aproximadamente desde cada lado hacia el centro.El centro está marcado con aproximadamente 2 cm de cinta aislante negra que abarca la unión entre las dos piezas. En los dos lados ascendentes hay un arco cortado en la pared (aproximadamente 15 x 5 cm).
Reglas y Puntuación Cada robot compite por turnos en una ronda. Cada ronda dura dos minutos. Elrobot que empuje la mayor cantidad de pelotas a través de su arco en ese tiempogana.
Fuente: John Billota, Rhode Island.
Aquavore
Descripción del DesafíoEl desafío es construir y programar un robot autónomo que nade o reme (precaución: ¡No usar agua en el tanque de los peces!)
Especificaciones del Área de JuegoEl área de juego es un tanque para peces de 55 galones (121 litros),aproximadamente un metro de largo. Se coloca una pared de aproximadamente 15 cm de alto en el centro.
Reglas y PuntuaciónEl robot debe nadar, gatear, saltar, volar o remar para alcanzar la meta. El robotdebe caber en un cubo de 18 cm.
Fuente: BEAM Robotics, Mark Tilden, Universidad de Waterloo, Canadá.

Ideas Adicionales Sobre Desafíos2 de 4
Aerobot
Descripción del DesafíoEl desafío es construir y programar un robot autónomo que vuele y suelte unacarga en el objetivo.
(Sugerencia: Puedes hacer volar el robot en un alambre).
Especificaciones del Área de JuegoUn área cuadrada de 15 cm de lado para soltar la carga. Se coloca un blancoen el centro.
Reglas y Puntuación El robot vuela y suelta la carga en el objetivo, luego retorna a la plataforma delanzamiento. Se otorgan puntos por control, exactitud al soltar la carga,número de intentos y el tiempo.
Fuente: BEAM Robotics, Mark Tilden, Universidad de Waterloo, Canadá.
Bolabot
Descripción del DesafíoEl desafío es construir y programar un robot autónomo que mueva muestrasde "rocas" del área de juego al área meta específica. El robot debe competircontra otro robot durante cada turno.
Especificaciones del Área de Juego El área rectangular es dividida en dos secciones designadas con una meta ypunto de inicio en cualquiera de los extremos. Las "rocas" se colocan al azar.
Reglas y Puntuación Dos robots compiten entre si en turnos de 90 segundos cada uno. Gana elrobot con la mayor cantidad de rocas en su meta al final de la ronda. Cadaroca es un punto. La competencia continua hasta que quede sólo un robot.
Fuente: Desconocida.
Basketball
Descripción del DesafíoEl desafío es construir y programar un robot autónomo que recoja una pelotadesde un punto de recepción específico (revisar las especificaciones a continuación), mueva la pelota a una "canasta" meta y la suelte. Compiten a lavez de dos a cuatro robots. Para mantener la puntuación fácilmente tal vezdesees marcar o pintar de alguna manera, la pelota de cada competidor.
Especificaciones del Área de JuegoEl área de juego es un cuadrado de 122 cm con paredes de 20 cm de alto. Enel centro de esta caja hay una taza de aproximadamente 7.5 a 10 cm dediámetro. Se coloca una etiqueta o marcador blanco debajo del área dispensadora de pelotas para activar los sensores.
Reglas y PuntuaciónLos robots compiten en rondas de dos minutos. Los estudiantes colocan laspelotas en sus robots soltándolas a través de un cono sujeto a la pared sobreel punto de recepción designado. El robot con la mayor cantidad de pelotasen la canasta gana. Si dos o más robots tienen igual cantidad de pelotas en lacanasta, el jugador con mayor cantidad de pelotas dentro del área de juegogana.
Fuente: Janice Bortland,Texas.
50PÁGINA

Ideas Adicionales Sobre Desafíos3 de 4
Robopinpong
Descripción del DesafíoEl desafío es construir y programar un robot que se mueva del extremode un área específica hacia en el centro donde se coloca una línea depelotas. El robot debe competir con otro robot para empujar tantaspelotas como sea posible hacia el lado del oponente en el área de juego.
Especificaciones del Área de JuegoEl área de juego es una mesa rectangular de 122 x 183 cm con paredesde 3 pulgadas a los lados. El piso en un lado del área está pintado denegro, el otro de blanco. El área se inclina en cada extremo y va hacia enel centro. De esa manera los robots pueden usar uno o varios sensoresinclinados hechos de un sensor de luz y dos piezas de colores diferenteso posiblemente dos sensores de contacto y un elemento pesado paradeterminar por donde van. La inclinación también asegura que las pelotasempujadas desde el centro se junten en el final de la mesa.
Reglas y PuntuaciónDos robots compiten en una ronda de 60 segundos. El robot con lamenor cantidad de pelotas en su área es el ganador de la ronda. El juegocontinua hasta que un robot en la clase es declarado ganador.
Fuente: Fred Martin, MIT.
Pioneros
Descripción del DesafíoUn robot o equipo de robots, señala el camino desde una posición inicialhacia una meta con una variedad de obstáculos. Los robots eligen entreseguir una línea hacia la meta o trazar un camino que atraviese el territorio desconocido que tiene obstáculos (o una combinación).
Especificaciones del Área de JuegoEl área es plana y de madera enchapada de 244 x 244 cm pintada denegro. El perímetro está rodeado por una pared de aproximadamente 7.5cm de alto. Los lados de la pared están pintados de blanco y la partesuperior está cubierta con cinta aislante azul excepto en el perímetro delárea de la meta. La parte superior de las paredes adyacentes al área de lameta están pintadas de rojo. El área de la meta (de aproximadamente 41x 30 cm) siempre se localiza en la esquina noreste del área.
Las pelotas que zigzaguean o chocan unas con otras son los juguetes delos niños que ruedan autónomamente sin rumbo. Estos "robots" ingresanal concurso. Los jugadores los pueden usar como puntos de referenciapara determinar si sus esfuerzos realmente representan mejoras en la tecnología económica ya existente.
Reglas y PuntuaciónCada robot debe caber dentro de un cubo de aproximadamente 30 cm alinicio del concurso. Luego el robot puede adquirir cualquier tamaño dentro de un cubo de aproximadamente 60 cm. Un robot puede chocarcon la pared sin recibir castigo. Un robot no debe subir por la pared. Unrobot puede ver sobre la pared o ver la parte superior de la pared. Losrobots tienen dos intentos para resolver el problema. El tiempo más cortode los dos intentos del encuentro es la puntuación final. En la meta secoloca una lata de gaseosa para ser recuperada. Se reducirá el tiempo acualquier robot capaz de tomar la lata de regreso al área de inicio.
Fuente: Prof. Bob Avanzato, Penn State Abington College.
51PÁGINA

Robot con Piernas
Descripción del DesafíoEl desafío es construir y programar un robot con piernas (en lugar deruedas) que pueda competir en una carrera en terreno difícil.
Especificaciones del Área de JuegoLos robots con piernas autónomos se enfrentan unos a otros en losdesafíos de distancia/progreso/habilidad sobre terrenos difíciles peroiguales.
Reglas y PuntuaciónLos robots se comparan en proporción de tamaño, número de extremidades, capacidad para levantar/operar, la funcionalidad dinámicaversus estática y la habilidad de manejo terrestre. Los robots son premiados con puntos basados en su habilidad para manejar el mayorrango de desafíos. Gana el competidor con la mayor cantidad de puntospor capacidad. La competencia está abierta para diseños variados.Tengaen cuenta que es difícil diseñar un caminante que pueda conducir.
Fuente: BEAM Robotics, Mark Tiden, Universidad de Waterloo, Canadá.
Ideas Adicionales para Desafíos4 de 4 52
PÁGINA

53PÁGINAReferencias Curriculares
Conceptos Claves
Trabajando en equipo, los estudiantes pueden contribuir con soluciones ybeneficiarse con las contribuciones de otros. Ellos verán cómo el trabajode mucha gente puede a menudo significar un mejor resultado que losesfuerzos individuales.
Trabajar en equipo es la manera típica de trabajo de muchos de nosotrosen el mundo real. Proporciona oportunidades para:
• La comunicación oral y el inicio en la escritura persuasiva y de explicación.
• Compartir ideas y puntos de vista.
• Usar razonamiento lógico para apoyar ideas particulares.
• Integrar ideas de matemática, ciencia y tecnología (revise la lista a continuación).
• Manejar reacciones emocionales, admitir fallas y reconocer resultados exitosos.
Para los estudiantes que no se consideran interesados en matemáticas yciencias, el diseñar robots LEGO® puede ser un esfuerzo artístico o expresivo.
Esta página describe algunos de los conceptos, habilidades ycaracterísticas del curriculum relacionadas con la experienciade los estudiantes con el Desafío en Equipo.
Trabajo en Equipo: Aprendizaje Cooperativo y Solución de Problemas
Ciencia y Tecnología
Matemática
Hay muchos conceptos que se relacionan con el maletín de Desafío en Equipo.A continuación se presentan algunos que fueron tomados de los Estándares de Ciencia Norteamericanos.
Los estudiantes deben desarrollar las habilidades necesarias para realizarinvestigaciones científicas, incluyendo:
• Diseño y conducción de una investigación científica.
• El uso apropiado de herramientas y técnicas para reunir,analizar e interpretar datos.
• Desarrollo de descripciones, explicaciones, predicciones y models using evidence (observations and data.)
• Pensamiento critico y lógico para relacionar las evidencias y las explicaciones.
• Reconocer explicaciones alternativas y predicciones.
• Diseñar una solución o un producto.
• Implementar un diseño propuesto.
• Evaluar diseños o productos que se complementen.
• Comunicar el proceso del diseño tecnológico.
El Consejo Nacional Norteamericano de Profesores de Matemáticaidentifica estas características, entre otras, como necesarias para uncurriculum de 5° a 8° grado.
• Situaciones problemáticas que establecen la necesidad denuevas ideas y motivación del estudiante… sirven como elcontexto para la matemática...
• Comunicación sobre matemática y razonamiento matemáticodebe impregnar el… curriculum.
• La tecnología… debe usarse donde sea apropiada.

Los requerimientos de las Etapas claves 2 y 3 de Orden TI (Tecnología de la Información) para controlar, medir y modelar se encuentran en el ROBOLAB™. Los siguientes cuadros muestran cómo elMaletín de Desafío de Equipo puede usarse con las Etapas claves 2 y 3 del Currículum TI.
Programa de la etapa clave 2 del estudio en TI
Los alumnos deben tener la oportunidad de:
usar TI para explorar y resolver problemas en el contexto de trabajo en una variedad de temas;
usar TI para aumentar la comprensión de información que ellos han obtenido y procesado;
discutir sus experiencias usando TI y evaluar su valor en sus prácticas de trabajo;
investigar paralelos con el uso de TI en el mundo real, considerar los efectos de tales usos y compararlos con otros métodos.
Controlando, monitoreando y modelando:
crear, probar, modificar y almacenar secuencias de instrucciones para controlar eventos;
usar equipos y software TI para monitorear eventos externos;
explorar los efectos del cambio de variables en simulaciones y paquetes similares; preguntar y responder preguntas del tipo "¿Qué pasaría si?";
reconocer patrones y relaciones en los resultados obtenidos de modelos o simulaciones basados en TI, prediciendo los resultados de las diferentes decisiones que pueden tomarse.
El RCX™ es una microcomputadora programable LEGOque permite la creación de dispositivos robóticos inde-pendientes. Es un desarrollo nuevo y excitante quepermite hacer programas en pantalla usando un lenguaje basado en iconos y fácil de usar llamadoROBOLAB.
Luego el programa se baja al RCX usando unTransmisor de Rayos Infrarrojos especial.
El RCX trabaja independientemente de la computadoraprincipal.Ya no hay cables, de modo que se crea unentorno independiente.
El software ROBOLAB está dividido en dos fases: Pilote Inventor.
La programación del Pilot usa la interfaz de hacer clic yescoger en una plantilla que puede modificarse.
La programación del Inventor se crea escogiendo ycolocando los iconos de una Barra de Funciones a unaVentana de Diagrama.
El enlazar los iconos de varias maneras permite a losestudiantes crear infinidad de programas.
El RCX y el software ROBOLAB permite a los estudiantes planificar, desarrollar, probar y modificarconjuntos de instrucciones y procedimientos de control de eventos en un entorno autónomo.
El RCX usa sensores para responder a su entorno,procesar datos y enviar señales a las salidas de motoreso lámparas para apagarlas o encenderlas.
El sistema ofrece oportunidades para solucionar problemas y cambiar las variables en el entorno, porejemplo ¿qué pasaría si se incrementa la velocidad delmotor?
Los alumnos deben tener la oportunidad de reconocerpatrones y relaciones cuando trabajen con una secuencia de comandos y predecir que podría sucederen una situación dada.
54PÁGINAReferencias Curriculares
Etapa clave 2 UK

Programa de la etapa clave 2 del estudio en TI
Los alumnos deben tener la oportunidad de:
usar el equipo y software TI autónomamente;
considerar el propósito por el cual la información se procesa y transmite;
usar su conocimiento y comprensión de TI para diseñar sistemas información y para evaluar y sugerir mejoras a los sistemas ya existentes;
investigar problemas modelando, midiendo y controlando, y construyendo Procedimientos TI;
considerar las limitaciones de las herramientas y fuentes de información TI y de los resultados que proporcionan, y comparar su efectividad y eficiencia con otros métodos de trabajo;
discutir algunas de los temas sociales, económicos,étnicos y morales propuestos por TI.
Controlando, midiendo y modelando:planear, desarrollar, probar y modificar conjuntos de instrucciones y procedimientos para controlar eventos;
usar un sistema que responda a la información de los sensores y explicar cómo utiliza la retroalimentación;
usar equipo y software TI para medir y registrar lasvariables físicas;
Explorar un modelo dado con un número de variables y crear modelos propios para detectar patrones y relaciones;
modificar las reglas e información de un modelo, y predecir los efectos de tales cambios;
evaluar un modelo completo comparando su conducta con la información reunida de una variedad de fuentes.
El RCX™ es una microcomputadora programable deLEGO® que permite la creación de dispositivos robóticos independientes.
Es un desarrollo nuevo y excitante que permite hacerprogramas en pantalla usando un lenguaje basado eniconos y fácil de usar llamado ROBOLAB.
La motivación para usar ROBOLAB es muy grande, eléxito es fácil y rápido ¡y resolver problemas con estesistema es divertido!
El programa se baja luego al RCX usando el Transmisorde Rayos Infrarrojos especial.
El RCX trabaja independientemente de la computadoraprincipal.Ya no hay cables, de modo que se crea unentorno independiente.
Los alumnos incrementarán sus habilidades pararesolver problemas y de programación trabajando conrobots programables con dispositivos de entrada y salida de sensores.
Usando el sistema ROBOLAB con el RCX, se puedenhacer varios programas y modelos, probarlos y modificarlos. ¡Se pueden crear algoritmos!
El software ROBOLAB está dividido en dos fases: Pilote Inventor.
La programación del Pilot usa la interfaz de hacer clicy escoger en una plantilla que puede modificarse.
La programación del Inventor se crea escogiendo ycolocando los iconos de una Barra de Funciones a unaVentana de Diagrama.
Al enlazar los iconos se pueden crear infinidad de programas.
El RCX usa sensores para responder a su entorno,procesar datos y enviar señales a las salidas demotores o lámparas para apagarlas o encenderlas.
Los sensores de contacto tienen apagado y encendidodigital;
Los sensores de luz son analógicos (y pueden reconocer diferentes tonos de gris) y pueden enviaruna variedad de señales a la computadora.
Los alumnos:
Entenderán cómo los sistemas de control monitorean acciones para proporcionar retroalimentación.
Crearán procedimientos con el lenguaje basado eniconos considerando un número de variables.
Reconocerán patrones y relaciones, y serán capaces de predecir resultados de diferentes decisiones.
55PÁGINAReferencias Curriculares
Etapa clave 2 UK

Referencias
Erwin, Benjamin, et. al. Middle School Engineering with LEGO and LabVIEW. Proceedings of National Instruments Week,August 1998,Austin,TX, Education Category.
Erwin, Benjamin. K-12 Education and Systems Engineering:A New Perspective. Proceedings of the American Society of Engineering Education National Conference, July 1998, Seattle,WA, session 1280.
Martin, Fred.The Art of LEGO Design.The Robotics Practitioner: The Journal for Robot Builders, volume 1,number 2, Spring 1995. (See below for a version you can download.)
National Council of Teachers of Mathematics, Inc., ed. Curriculum and Evaluation Standards for School Mathematics. Reston,VA: NCTM, pages 66-67, 1989.
Papert, Seymour. (1992) The Children's Machine. (excerpts) New York: Basic Books. pp. 116-125, 128-131,196-201, 210.
Resnick, M. & Ocko, S. (1991). LEGO/Logo: Learning Through and About Design. In I. Harel & S. Papert (Eds.),Constructionism. Norwood, NJ:Ablex.
Sargent, Randy, et. al. Building and Learning With Programmable Bricks. In Constructionism in Practice:Designing,Thinking, and Learning in a Digital World. (Kafai,Y. & Resnick, M. (Eds.)),Mahwah, NJ: Lawrence Erlbaum Associates. 1996.
The National Academy of Sciences, ed. The National Science Education Standards.Washington, DC: National Academy Press, pages 145-166, 1996.
Material Impreso
Páginas en Internet
La página LEGO MINDSTORMS for Schools.http://www.LEGO.com/education/mindstorms
La página de National Instruments ROBOLAB.http://www.natinst.com/robolab
Varias universidades y organizaciones que trabajan con robótica.A continuación presentamos algunas.
Laboratorio de Multimedia del Instituto de Tecnología de Massachusettshttp://www.media.mit.eduPágina de Fred Martin El Arte del Diseñohttp://www.media.mit.edu/~fredm/papers/artoflego.pdf
Universidad de Stanfordhttp://robotics.stanford.edu
Tuftshttp://www.ldaps.ivv.nasa.gov
Manchester, UKhttp://www.cs.man.ac.uk/robotics/
Laboratorio de Propulsión JetUna organización que desarrolla tecnologías innovativas.http://robotics.jpl.nasa.gov/
Página Web para el Proyecto del Desafío de Robótica de Pennsylvania y el grupo de la NASA Langely sobreProyectos de Aprendizaje tecnológico.http://k12unix.larc.nasa.gov/projects/PRC/information_PRC.html
56PÁGINA

















