CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOL~GICO cenidet “DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N PARA SISTEMAS DE ALIMENTACI~N ININTERRUMPIBLE, Y sus TÉCNICAS DE CONTROL” T E S I S QUE PARA OBTENER EL GRADO DEDOCTOR EN CIENCIAS EN INGENIERIA ELECTRÓNICA P R E S E N T A NIMROD VÁZQUEZ NAVA Cuemavaca. Mor Noviembre 2003
Transcript
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOL~GICO
cenidet
“DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N PARA SISTEMAS DE ALIMENTACI~N ININTERRUMPIBLE, Y sus
TÉCNICAS DE CONTROL”
T E S I S QUE PARA OBTENER EL GRADO DEDOCTOR EN CIENCIAS EN INGENIERIA ELECTRÓNICA P R E S E N T A NIMROD VÁZQUEZ NAVA
Cuemavaca. Mor Noviembre 2003
S
. .
DEDICO
A DIOS, Quien no me ha dejado solo en mi trayecto y ha
sido mi luz en el camino.
CLAUDIA, mi acompañante y soporte de la vida.
JOSUE, mi retoño.
Mi tesis con todo cariño.
AGRADEZCO
A MI FAMILIA, Claudia y Josué por su cariño y amor.
MI MADRE, Adelina por haberme dado la vida.
MIS ASESORES, Jaime Arau y Jaime Álvarez por su
apoyo e invaluable soporte.
MIS AMIGOS, Elías Rodríguez y Domingo Cortés
por sus importantes sugerencias.
I.T. de Celaya, por haberme permitido realizar mis estudios.
CoSNET, por su apoyo económico.
Gracias.. .
TABLA DE CONTENIDO Simbología
Lista de tablas y figuras
Introducción
CAPÍTULO 1
ESTADO DEL ARTE
1.1 Panorama general 1.2 Convertidores cdca
1.2.1 El inversor tradicional 1.2.2 Inversor con capacidad de elevación
1.2.3 Cicloconvertidor 1.2.4 Flyback de cuatro cuadrantes 1.2.5 Resumen Estrategias de control para convertidores cdca 1.3.1 Técnicas tradicionales 1.3.2 Otras técnicas de control
1.2.2.1 Extensión a otro tipo de convertidores
1.3
1.3.2.1 Estrategias que desacoplan variables 1.3.2.2 Estrategias de control discreto 1.3.2.3 Más estrategias de control
1.3.3 Resumen Esquemas de SAI reportados en la literatura 1.4.1 Esquema de SAI pasivo 1.4.2 Esquemas de SAI de doble conversión
1.4.2.1 Esquema con cuatro etapas 1.4.2.2 Esquema con integración de etapas 1.4.2.3 Esquema con tres etapas 1.4.2.4 Esquema con tres etapas de alta eficiencia 1.4.2.5 Esquema con dos etapas
1.4.3.1 Esquema con inductor de baja frecuencia 1.4.3.2 Esquemas con trasformadores de baja frecuencia 1.4.3.3 Esquema basado en el inversor elevador
1.4
1.4.3 Esquemas de SAI interactivo
1.4.4 Resumen 1.5 Propuesta de tesis
V
vi11 ...
xii
2 3 4 6 1 8 9 9
10 I O 10 11 13 14 15 15 16 9
16 16 18 19 20 21 22 22 23 23 24 24
CAPÍTULO 2
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N
2.1
2.2
2.3
El inversor elevador 2.1.1 Forma de operación 2.1.2 Diseño 2.1.3 Resultados experimentales inversor reductor-elevador 2.2.1 Forma de operación 2.2.2 Diseño 2.2.3 Resultados experimentales Características de los inversores con capacidad de elevación 2.3.1 Reciclado de energía 2.3.2 Esfuerzos en los semiconductores y elementos pasivos 2.3.3 Análisis de eficiencia 2.3.4 Eficiencia, energía reciclada y capacidad de elevación
CAPÍTULO 3
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
3.1 Introducción 3.2 Modelo del inversor elevador 3.3 Control por modos deslizantes
3.3.1 Con sensores de corriente 3.3.1.1 Superficie de deslizamiento 3.3.1.2 Existencia del modo deslizante 3.3.1.3 Estabilidad dentro de la superficie 3.3.1.4 Obtención de los parámetros del controlador 3.3.1.5 Aspectos de implementación 3.3.1.6 Resultados de simulación y experimentales
3.3.2.1 Superficie de deslizamiento 3.3.2.2 Aspectos de implementación 3.3.2.3 Resultados de simulación y experimentales
3.3.2 Sin sensores de comente
3.4 Control basado en pasividad 3.4.1 Diseño del controlador
3.4.1.2 Ley de control 3.4.1.3 Primeros resultados de simulación y experimentales 3.4.1.4 Modificación a la ley de control 3.4.1.5 Estabilidad del sistema 3.4.1.6 Aspectos de implementación 3.4.1.7 Resultados finales de simulación y experimentales
3.4.2.1 Aspectos de implementación 3.4.2.2 Resultados de simulación y experimentales
Control no lineal con sólo retroalimentación de tensión 3.5.1 Implementación de la ley de control 3.5.2 Resultados de simulación y experimentales 3.5.3 Ley de control continua convertida a ley de control discontinua Discusión de las diferentes técnicas de control
3.4.2 Pasividad con modos deslizantes
3.5
3.6
CAPÍTULO 4
DE ALIMENTACI~N ININTERRUMPIBLE IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS
4.1 Sistemas de alimentación inintemunpible 4.2 Esquema con cargador de baterías integrado
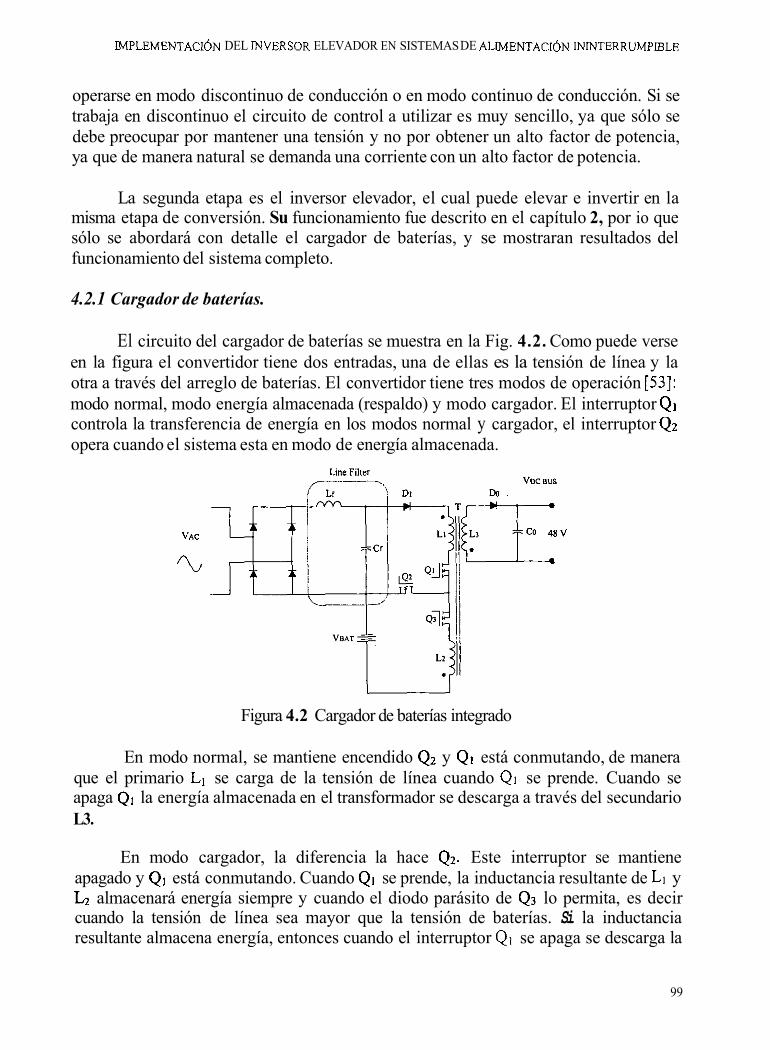
4.2.1 Cargador de baterías 4.2.2 Sistema completo
4.2.2.1 Modo normal y cargador 4.2.2.2 Cambio de carga 4.2.2.3 Carga no lineal 4.2.2.4 Falla de linea 4.2.2.5 Eficiencia
Esquema con cargador de baterías separado 4.3.1 Modos de operación 4.3.2 Sistema completo
4.3
4.3.2.1 Modo normal 4.3.2.2 Cambio de carga 4.3.2.3 Carga no lineal 4.3.2.4 Falla de línea 4.3.2.5 Eficiencia
4.4 Propuesta de otros esquemas 4.5 Comparación con esquemas reportados por otros autores
Apéndice C. Estabilidad de ecuaciones diferenciales
112
116
I
V
X
i V
SIMBOLOGÍA
Capacitancia Comente alterna Comente directa Ciclo de trabajo Ciclo de trabajo máximo Rizo de corriente Incremento en el tiempo Rizo de tensión Error de corriente Error de tensión Error de corriente emulado para el controlador por pasividad Error de corriente emulado Error de comente emulado, que no sensa comente Eficiencia del inversor elevador Eficiencia de un convertidor cdcd elevador Eficiencia de un convertidor de potencia Frecuencia de conmutación Factor de potencia en directa
Factor de potencia del inversor elevador sin considerar reciclado
Factor de potencia del inversor elevador Ganancia máxima Holgura en la componente de continua del inversor elevador Función de energía Comente del inductor Comente pico del inductor Corriente efectiva del inductor Componente de continua de la comente del inductor Comente efectiva de la componente fundamental Comente efectiva del segundo armónico Comente de salida Comente pico de salida Porcentaje de energía reciclada
V
Parámetro derivativo del controlador Parámetro del controlador por modos deslizantes Parámetro del controlador por pasividad Parámetro integral del controlador Parámetro proporcional del controlador Inductancia Modo conducción continua Potencia real de entrada Potencia real de salida Pérdidas de conducción Modulación de anchura de pulso, por sus siglas en inglés Resistencia Parámetro del controlador por pasividad Sistema de alimentación ininterrumpible Sistema fotovoltaico Control por modos deslizantes, por sus siglas en inglés Parámetro del controlador por modos deslizantes Función de deslizamiento propuesto Función de deslizamiento utilizada para no sensar corriente Función de deslizamiento para el controlador pasividad con sm Función de deslizamiento tradicional Tiempo de encendido del interruptor Tiempo de apagado del interruptor Periodo de conmutación Distorsión armónica total, por sus siglas en inglés Sistema de alimentación inintempible, por sus siglas en inglés Ley de control Control equivalente
Tensión instantánea de una rama del inversor Tensión máxima del capacitor
Tensión de encendido del semiconductor Componente de cd de la tensión de rama Tensión de un diodo en conducción Factor de tensión para determinar las pérdidas Tensión de entrada
Vi
v o Tensión instantinea de salida Vv Tensión pico de salida v,,, Tensión efectiva de salida w =n
'nd
Frecuencia angular de la tensión de salida del inversor Variable de estado del modelo del inversor Variable de estado de la dinámica deseada
LISTA DE TABLAS Y FIGURAS Capítulo 1 Figura 1.1 Figura 1.2 Figura 1.3 Figura 1.4 Figura 1.5 Figura 1.6
Figura 1.7 Inversor reductor Figura 1.8
Figura 1.9 Inversor elevador Figura 1.10 Inversor derivado del convertidor cdcd reductor/elevador Figura 1.1 1 inversor derivado del convertidor cdcd cuk Figura 1.12 inversor derivado del convertidor cdcd sepic Figura 1.13 Inversor derivado del convertidor cdcd zeta Figura 1.14 Etapa inversora de SAI basada en un ciclo-convertidor Figura 1.15 Flyback de cuatro cuadrantes Figura 1.16 Controlador con desacoplo de la tensión de salida propuesto en [ 151 Figura 1.17 Controlador sin desacoplo de la tensión de salida propuesto en [ 161 Figura 1.18 Controlador basado en desacoplar variables para el inversor elevador Figura 1.19 SAI pasivo propuesto reportado en [33] Figura 1.20 SAI de doble conversión reportado en [34] Figura 1.21 SAI de doble conversión reportado en [35] Figura 1.22 SAI de doble conversión reportado en [36] Figura 1.23 SAI de doble conversión reportado en [38] Figura 1.24 SAI de doble conversión reportado en [39] Figura 1.25 Esquema de SAI interactivo reportado en [40] Figura 1.26 Esquema de SAI interactivo reportado en [41] Figura 1.27 Esquema de SAI interactivo reportado en [42]
Bloques de un SAI con alto factor de potencia Carga no lineal de un SAI . Entrada típica de un equipo electrónico El inversor puente completo (inversor reductor) Función de ganancia del inversor reductor Diagrama de bloques de un inversor basado en convertidores cdcd Convertidor cdcd reductor, a) unidireccional, b) bidireccional en corriente
Convertidor cdcd elevador, a) unidireccional, b) bidireccional en corriente
6 6
6 1 1 1 8 9 9
11 12 13 16 17 18 19 20 21 22 23 24
Capítulo 2 Figura 2.1 Figura 2.2 Figura 2.3 Figura 2.4 Figura 2.5 Figura 2.6 Figura 2.7
Figura 2.8 Figura 2.9
Convertidor cdcd elevador 28 Señal de control para el interruptor 28 Inversor elevador 29 Tensión deseada en el capacitor 30 Función de ganancia 31 Comente en el inductor 32 Formas de onda experimentales del inversor elevador. a) tensión de 36 rama y corriente de inductor, b) tensión y comente de salida, tensión de rama Inversor elevador.
Figura 2.13 Figura 2.14 Figura 2.15 Figura 2.16 Figura 2.17 Tabla 2.1 Tabla 2.2
Capítulo 3 Figura 3.1 Figura 3.2 Figura 3.3 Figura 3.4 Figura 3.5 Figura 3.6 Figura 3.7
Figura 3.8
Figura 3.9
Tensión deseada en el capacitor Función de ganancia del inversor reductor-elevador Formas de onda experimentales del inversor reductor-elevador. a) corriente del inductor, b) tensión y corriente de salida inversor elevador Flujo de energía del inversor elevador Procesamiento de energía de los inversores con capacidad de elevación Efecto del porcentaje de energía reciclada (k) en la eficiencia Eficiencia de los distintos inversores Pasos de diseño del inversor elevador Esfuerzos en los inversores con capacidad de elevación
Circuito simplificado del inversor elevador Plano de fase para CI Plano de fase para -a Plano de fase con el control SM Implementación del SMC. Señal de control manteniendo el tiempo de encendido constante Formas de onda ante una carga lineal. De arriba para abajo: Tensiones de rama y tensión de entrada; tensión de salida y corriente de salida; ley de control de una rama Formas de onda cuando se hace una mala selección de los parámetros del controlador: tensiones de rama y tensión de entrada; tensión de salida y corriente de salida; ley de control de una rama. a) cuando se pierde la existencia, b) cuando se pierde la estabilidad Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y comente de salida
Figura 3.10 Inversor elevador operando ante una carga no lineal. De arriba para abajo: Tensiones de rama, tensión y corriente de salida
Figura 3.1 1 Inversor elevador operando ante un cambio en la tensión de entrada. De arriba para abajo. Tensión de rama, tensión de entrada, tensión y corriente de salida
Figura 3.12 Implementación de la compuerta lógica. Figura 3.13 Inversor elevador ante una cambio de carga. De arriba para abajo:
tensiones de rama, tensión y comente de salida, corriente en un inductor
Figura 3.14 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida, corriente en un inductor
Figura 3.15 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
Figura 3.16 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
38 39 42
44 44 46 47 47 35 45
54 56 56 56 64 65 66
66
67
67
68
69 70
70
71
71
ix
Figura 3.17 Inversor elevador ante un cambio en la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de salida
rama y tensión de entrada; tensión y corriente de salida; ley de control de una rama
Figura 3.19 Formas de onda ante un cambio de carga. De arriba abajo: Tensiones de rama y tensión de entrada; tensión y corriente de salida; ley de control de una rama
Figura 3.20 Formas de onda ante una carga resistiva. De arriba abajo: Tensión de una rama y tensión de entrada
Figura 3.21 Simulación utilizando un modelo del inversor más completo, pero utilizando la ley de control simplificada. De arriba abajo: Tensión de una rama y tensión de entrada
Figura 3.22 Simulación utilizando un modelo del inversor más completo, pero sin simplificar la ley de control. De arriba abajo: Tensión de una rama y tensión de entrada
Figura 3.23 Circuito para implementar un compensador PI Figura 3.24 Circuito para implementar un divisor Figura 3.25 Generación de pulsos a partir de una ley de control continua Figura 3.26 Inversor elevador ante un cambio de carga. De arriba para abajo:
tensiones de rama, tensión de salida y corriente de salida, ley de control de una rama
Figura 3.27 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
Figura 3.28 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión y corriente de salida
Figura 3.29 Inversor elevador ante una carga no lineal. De arriba para abajo: tensión de rama, tensión y corriente de salida
Figura 3.30 Inversor elevador ante un cambio de la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de salida
Figura 3.31 Diagrama de bloques de la implementación de pasividad en modos deslizantes
Figura 3.32 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
Figura 3.33 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida, corriente en el inductor
Figura 3.34 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión y corriente de salida
Figura 3.35 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
Figura 3.36 Inversor elevador ante un cambio de la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de
Figura 3.18 Formas de onda ante una carga resistiva. De arriba abajo: Tensiones de
72
77
77
78
79
79
80 81 81 82
82
83
83
84
85
86
86
87
87
88
X
salida Figura 3.37 Compensador derivativo modificado Figura 3.38 Circuito para insertar el tiempo muerto Figura 3.39 Inversor elevador ante un cambio de carga. De arriba para abajo:
tensiones de rama, tensión de salida y corriente de salida, ley de control Figura 3.40 inversor elevador ante una carga no lineal. De arriba para abajo:
tensiones de rama, tensión de salida y corriente de salida Figura 3.41 Inversor elevador ante un cambio de carga. De arriba para abajo:
tensiones de rama, tensión de entrada, tensión y corriente de salida Figura 3.42 Inversor elevador ante una carga no lineal. De arriba para abajo:
tensiones de rama, tensión y corriente de salida Figura 3.43 Inversor elevador ante un cambio de la tensión de entrada. De arriba
para abajo: tensiones de rama, tensión de entrada, tensión y corriente de salida Comparación de estrategias implementadas Tabla 3.1
Capítulo 4 Figura 4.1 Figura 4.2 Figura 4.3 Figura 4.4 Figura 4.5 Figura 4.6 Figura 4.7 Figura 4.8 Figura 4.9 Figura 4.1 O Figura 4.1 1 Figura 4.12 Figura 4.13 Figura 4.14 Figura 4.15 Figura 4.16 Figura 4.17 Figura 4.18 Figura 4.19 Figura 4.20 Tabla 4.1
Circuito de potencia del S A I con cargador de baterías integrado Cargador de baterías integrado Circuito lógico para controlar los interruptores Cambio de modo normal a modo cargador Cambio de carga Carga no lineal Falla de la tensión de iínea Regreso de la tensión de iínea Eficiencia del SAI S A I con cargador de baterías separado Modo normal de operación Modo energía almacenada Modo normal, tensión y comente de salida Modo normal, tensión y corriente de entrada Cambio de carga Carga no lineal Falla de la linea de alunentación Regreso de la linea de alimentación S A I sin aislamiento basado en el inversor elevador S A i de dos etapas y pocos dispositivos Comparación de esquemas de S A i de doble conversión.
ctualmente la tecnología de los dispositivos de estado sólido se ha desarrollado A considerablemente, lo que ha permitido que la electrónica de potencia haya tomado importancia en numerosas aplicaciones como controladores de calor, controles de iluminación, control de motores, fuentes de alimentación, sistemas de alimentación ininternunpible, etc. En especial, la conversión cdcd ha tenido grandes y nuevos avances que se han extendido a la conversión cdcd. Hoy en día dichos avances se pueden extender no sólo a la conversión cdcd sino también a la conversión cuca con una nueva forma de conceptualizar dicha conversión.
EFICIENCJA EN LA CONVERSIÓN CDlCA
En todo tipo de conversión la eficiencia es relevante, debido a que nos indica qué tanto se aprovecha la energía en el proceso. El producir energía es costoso, por lo que ahorrarla es siempre una ventaja apreciable.
En la conversión cdca (o inversión) la eficiencia es siempre deseable, ya sea como parte de un sistema de alimentación inintempible (SAI) o cualquier otro.
Normalmente la inversión, en aplicaciones como los SAI's, se ha realizado en dos etapas: una que efectúa el trabajo propio del inversor (conversión cdca) y otra que eleva la tensión. Esto se debía a que los inversores tradicionales son incapaces de obtener una tensión de salida superior a la de entrada; y en los S A i de baja potencia la fuente primaria de alimentación va de los 12V a los lOOV, por lo que se requiere de una etapa elevadora de tensión que permita entregar como salida 120 Vea.
Recientemente se han propuesto nuevas topologías de inversores que tienen la capacidad de elevar tensión, por io que se reduce el número de etapas para realizar la conversión cd/ca de un SAI, así como una mejona en la eficiencia y un bajo costo debido a la disminución de componentes.
RESPUESTA DINÁMICA
Cuando un sistema está expuesto a cambios repentinos en la carga, como es el caso de un SAi, su forma de operación se ve afectada ocasionando sobretensiones, tensión baja, distorsiones en la forma de onda de salida, etc., io que trae como resultado destrucción o fallas en el funcionamiento de la carga como io pueden ser: apagado, reencendido y comportamientos no deseados.
Además de lo anterior, los equipos electrónicos que se conectan a un SA1 representan para él una carga no lineal. Dicha carga (puente rectificador más capacitor) provoca una distorsión en la tensión de salida de manera periódica, llegando a producir una distorsión armónica en la tensión de salida superior al 5%.
Para resolver los problemas anteriores la tensión de salida entregada por un SAI debe estar libre de distorsiones. Por ello es deseable que el SA1 tenga la capacidad de responder rápidamente ante perturbaciones (buena respuesta dinámica) y no se modifique su forma de operación (robustez). Tanto la respuesta dinámica como la robustez de un sistema dependen de la estrategia de control utilizada.
Existen diversas técnicas de control propuestas para inversores tradicionales y muy pocas para los inversores con capacidad de elevación. Las técnicas tradicionales son muy lentas, y algunas de las estrategias recientemente propuestas son complicadas y/o costosas de implementar. Lo anterior nos indica la necesidad de estudiar estrategias de control que introduzcan robustez y buena respuesta dinámica en los inversores, pero manteniendo una sencillez en la implementación. Las estrategias que proporcionan buenas características y permiten mantener una sencillez en su implementación son, por ejemplo, el control por modos deslizantes, el control basado en pasividad y otras.
Con el panorama antes mencionado, en cuanto a eficiencia y respuesta dinámica, en los sistemas de alimentación inintemmpible es importante estudiar los inversores con capacidad de elevación, para establecer qué topología es la mejor para la aplicación en cuestión; así como nuevas estrategias de control con las que se puedan obtener buenos resultados en respuesta dinámica.
Anteriormente sólo se había propuesto el inversor elevador para su uso en SAI’s, pero nunca se había probado dentro de un esquema que lo utilizara, por lo que es interesante proponer esquemas en los que finalmente se vea la reducción de etapas comparándolos con otros esquemas de SAI.
En la presente tesis se estudian topologías de inversores con capacidad de elevación pensados para Sistemas de Alimentación Ininterrumpible, con el propósito de disminuir el nUmero de etapas que conforman un SA1 y así mejorar la eficiencia y el costo de estos sistemas. También se estudian diversas estrategias de control con el propósito de obtener robustez y una buena respuesta, pero manteniendo en lo posible la sencillez de implementación. Finalmente se proponen diversos esquemas de SA1 donde se utilizan los inversores con capacidad de
... Xl l l
elevación y se obtiene una reducción de etapas al compararlos con otros SAI's. Para lo anterior se implementaron diferentes prototipos.
El trabajo está organizado de la siguiente manera. En el capítulo 1 se describe el panorama general de los inversores en los sistemas de alimentación ininterrumpible; las técnicas de control utilizadas en los inversores, así como también se describen diversos esquemas de SAi reportados en la literatura, para finalizar en la propuesta de tesis. En el capítulo 2 se analizan los inversores con capacidad de elevación; se presentan procedimientos de diseño; y las características de los inversores con capacidad de elevación. En el capítulo 3 se presentan diversas técnicas de control utilizadas para el control de los inversores con capacidad de elevación, se presentan resultados experimentales y de simulación; finalmente se hace una comparación de las estrategias implementadas. En el capítulo 4 se presentan diferentes esquemas de SAi basados en el inversor elevador como parte fundamental del sistema; se presentan resultados experimentales.
xiv
Capítulo 1
ESTADO DEL ARTE
En este capítulo se describe el panorama general de los sistemas de alimentación inintemimpible, así como los problemas que presentan en cuanto a eficiencia y respuesta dinámica, enfatizándose en la etapa inversora. Por ello se analizan las diferentes formas de realizar la conversión caca, las estrategias tradicionales de control y las estrategias recientemente reportadas en la literatura empleadas en convertidores cdíca, y para no perder de vista el contexto del trabajo se presentan los esquemas los esquemas tradicionales de sistemas de alimentación ininterrumpible y esquemas recientemente reportados en la literatura.
ESTADO DEL ARTE
AC
1.1 Panorama General La electrónica de potencia ha tomado gran importancia en nuestros días, y parte
de ello se debe a que uno de sus objetivos es estudiar las formas en que los equipos sean más eficientes. Aplicaciones como sistemas de alimentación inintemunpible (Slu o U P S por sus siglas en inglés), y sistemas fotovoltaicos (SF) tienen una eficiencia baja debido a que están constituidas por varias etapas en cascada y, precisamente en este tipo de aplicaciones donde la alimentación de respaldo se obtiene de una batería, es necesario que las etapas involucradas tengan una buena eficiencia.
__ __ ............. .
&- - ARREGW DE BATERIAS T
Figura 1 . 1 Bloques de un SAi con alto factor de potencia
Por otra parte, la carga típica de un SAi son equipos electrónicos que tienen en su entrada, como convertidor cdcd, un puente rectificador y un capacitor conectado como se muestra en la figura 1.2. Este tipo de equipos es una carga no lineal para el
2
ESTADO DEL ARTE
SAI [2,3], y ocasiona una deformación en la tensión de salida del SAI, de forma que la distorsión armónica total (THD por sus siglas en inglés) de tensión es muy superior al 5%. Cuando los equipos electrónicos sensibles son alimentados con una tensión distorsionada no operan correctamente. Por ello para resolver este problema se necesita un control que evite que la tensión de salida se distorsione considerablemente.
Las técnicas de modulación tradicionales como son la modulación de anchura de pulso (PWM por sus siglas en inglés) senoidal y programado, no pueden resolver el problema antes mencionado debido a que el esquema de regulación toma varios ciclos de línea; puesto que se regula el voltaje promedio o efectivo. Para poder evitar la distorsión de la tensión de salida es necesario que el sistema sea retroalimentado lo más rápido posible, lo cual se puede lograr con un controlador que proporcione una mayor robustez y mejor respuesta dinámica.
........................................
s*+---$-T, Conveddor , , :
CDICD ~
Carga no lineal , .........................................,
Figura 1.2 Carga no heal de un SAI. Entrada típica de un equipo electrónico
Por lo anterior, el tema central de este trabajo es el estudio de inversores con capacidad de elevación y sus técnicas de control para mejorar la eficiencia y respuesta dinámica de los sistemas de alimentación ininterrumpible, como aplicación de estos convertidores. En este capítulo se hace una revisión de los diferentes tipos de inversores monofásicos, las diferentes estrategias de control utilizadas en las topologías inversoras, así como los diferentes esquemas de S A i reportados en la literatura tomando como base la clasificación de la norma internacional iEC 62040-3 [3].
1.2 Convertidores cdca
En la literatura se han reportado diversos esquemas de inversores, donde el esquema monofásico tradicional es el inversor puente completo [4]. Recientemente se ha propuesto un inversor con capacidad de elevación [5,6], el cual tiene una forma de operación distinta que el inversor tradicional. Además de los inversores antes mencionados, en la literatura se han reportado diferentes formas de implementar la etapa inversora de un S A i , las cuales se discuten en esta sección.
3
ESTADO DEL ARTE
1.2.1 El inversor tradicional
El convertidor conocido como inversor (Fig. 1.3) es una topología que sólo puede reducir tensión, es decir que la tensión instantánea de salida siempre es menor que la tensión de entrada. Esta configuración tradicional es la de un inversor puente completo.
Figura 1.3 El inversor puente completo (inversor reductor).
En la figura 1.4 se presenta la gráfica de la función de ganancia del inversor de la figura 1.3 en función del ciclo de trabajo d. Esta gráfica considera solo el estado estacionario y una máxima transferencia de energía de la tensión de entrada a la salida. Como se puede apreciar, la ganancia del convertidor oscila entre 1 y -1, por lo que no es posible obtener tensiones superiores a la tensión de entrada, y entonces su función se limita a invertir. Debido a esta característica se le denomina inversor reductor.
.I$ 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 d
Figura 1.4 Función de ganancia del inversor reductor.
La forma tradicional de ver el inversor reductor es la de un convertidor que produce una tensión alterna cuadrada, pero modulada en ancho de pulso, con el propósito de que al utilizar un filtro pasa bajas sea fácil obtener una tensión senoidal [41.
Otra forma de construir un inversor es a partir de dos convertidores cdcd bidireccionales en comente [5,6], donde la carga se conecta en forma diferencial (Fig. 1.5).
4
ESTADO DEL ARTE KT5, Convertidor Convertidor
-
2 Figura 1.5 Diagrama de bloques de un inversor basado en convertidores cdícd.
De esta manera el inversor típico reductor (puente completo), junto con su filtro pasa bajas (Fig. 1.3) se puede visualizar como dos convertidores cdícd reductores (buck), donde la carga se conecta en forma diferencial [5,6].
Partiendo del convertidor cdícd reductor de la Fig. 1.6.a, se puede llegar fácilmente a tal visualización: l), el convertidor de un cuadrante se convierte en un convertidor bidireccional (Fig. 1.6.b); 2), se colocan ambos convertidores como lo muestra la figura 1.5, obteniéndose el circuito de la figura 1.7; 3), se hace una simplificación para llegar al circuito de la figura 1.3, que es el inversor puente completo típico o bien, inversor reductor.
Figura 1.6 Convertidor cdicd reductor, a) unidireccional, b) bidireccional en comente.
Si se utiliza un convertidor cdícd del tipo reductor se puede obtener una topología inversora reductora, pero si se utiliza un convertidor cdícd del tipo elevador se obtiene una topología inversora elevadora de tensión. De igual manera como se construyó el inversor reductor a partir de dos convertidores cdícd reductores, se puede deducir la topología de un inversor elevador a partir de dos convertidores cdcd del tipo elevador; esta idea fue estudiada simultáneamente por dos grupos de investigación, reportándose resultados en [5] y en [6].
5
ESTADO DEL ARTE
Vin -- - _- -- __ i -I _- _- __
1.2.2 Inversor con capacidad de elevación.
El inversor con capacidad de elevación, nombrado en la literatura como inversor elevador, puede elevar e invertir tensión ai mismo tiempo; la capacidad de elevación se limita, ai igual que en un convertidor cdícd elevador [4], por sus elementos parásitos y la potencia demandada.
El inversor elevador se puede construir siguiendo los pasos mencionados en la sección anterior: 1), el convertidor cdcd elevador (en este caso) de un cuadrante (figura 1.8.a) se convierte en un convertidor bidireccional en corriente (Fig. 1.8.b); 2), se colocan ambos convertidores como lo muestra la figura 1.5, obteniéndose el circuito de la figura 1.9, en este caso dicho circuito no puede simplificarse, por lo que queda como io muestra la figura 1.9.
Figura 1.8 Convertidor cdkd elevador, a) unidireccional, b) bidireccionai en corriente.
Carga
Figura 1.9 Inversor elevador.
6
ESTADO DEL ARTE
1.2.2.1 Extensión a otro tipo de convertidores.
Como se vio antenomente, un inversor se puede construir a partir de dos convertidores cdcd bidireccionales en comente. Se enfatizó en la construcción tanto del inversor tradicional como del inversor elevador puesto que ya han sido estudiados. Sin embargo, la idea de construir un inversor se puede extrapolar a cualquier convertidor cdícd como lo puede ser el convertidor reductor/elevador, Cúk, Sepic y Zeta [ 5 ] .
En las figuras 1.10, 1.11, 1.12 y 1.13 se muestran las topologías de los inversores que se obtendrían con los convertidores cdícd respectivos, aplicando la misma idea de utilizar dos convertidores como lo muestra la figura 1.5.
Figura 1.1 O Inversor derivado del convertidor cdcd reductor/elevador. L L
Figura 1.1 1 Inversor derivado del convertidor cdcd cuk. L L
Carga
Figura 1 . I2 Inversor derivado del convertidor cd/cd sepic.
7
ESTADO DEL ARTE
Carga
Figura 1.13 Inversor derivado del convertidor cdcd zeta.
El inversor derivado de convertidor cdícd zeta, puede simplificase al igual que se simplificó el inversor basado en el convertidor cdicd reductor.
De las diferentes topologías de inversores con capacidad de elevación, se puede ver que las más sencillas, por la cantidad de elementos, son el inversor elevador y el inversor reductor/elevador. Las otras topologías no son tan atractivas ya que son de igual o mayor número de elementos que la solución de dos etapas (convertidor cdícd elevador en cascada con el inversor reductor). Por otro lado estos sistemas son más complicados de controlar que la solución de dos etapas, por lo que pierde sentido el uso de estos convertidores.
1.2.3 Ciclo-convertidor
En [7-91 se presentan diferentes esquemas que utilizan un ciclo-convertidor para implementar la etapa inversora. La intención de utilizar el ciclo-convertidor se debe a la necesidad de reducir el peso y volumen del SAi debido al uso de un transformador de alta frecuencia y no de baja frecuencia. En este esquema se utilizan dos etapas y el trasformador.
Debido a la similitud de funcionamiento de las ideas presentadas en [7-91, se explicará únicamente el esquema reportado en [7]. El circuito de potencia básico utilizado para este esquema se muestra en la Fig. 1.14. Dicho esquema está compuesto de un inversor push-pull en la entrada y en la salida de un cicloconvertidor o convertidor cdca.
En estos esquemas, aunque su forma de operación parece sencilla tiene sus complicaciones en la etapa de potencia. Los interruptores S3 y S4 deben ser de cuatro cuadrantes (aumentándose el costo) y debido a las inductancias parásitas del transformador deben utilizarse circuitos recortadores de tensión [SI. Como se utiliza un inductor para el filtrado, debe existir un limitador de comente para el instante en el que
8
ESTADO DEL ARTE
VI V,
Figura 1.15 Flyback de cuatro cuadrantes
El convertidor opera en cuatro modos, cada uno para operar en cada cuadrante. La forma de controlar el convertidor se vuelve complicada, desde el momento que debe identificarse el cuadrante en el que el convertidor está operando y por lo tanto utilizar los interruptores adecuados, esto independiente del esquema para mantener regulada la tensión de salida.
Es importante mencionar que en [lo] este esquema se utiliza para un timbre eléctrico, el cual requiere de muy poca energía y la tensión de salida es de 40 Vrms. Para ese tipo de aplicaciones no se requiere una buena dinámica en la tensión de salida.
1.2.5 Resumen
En un SAI es deseable que la topología utilizada para invertir la tensión también pueda elevar tensión, esto debido a que un bus de batenas pequeño permite disminuir el volumen y peso del SAi .
9
ESTADO DEL ARTE
Tres de los esquemas antes mencionados poseen la capacidad de elevación: el inversor elevador, el basado en un cicloconvertidor y el flyback de cuatro cuadrantes. El ciclo convertidor tiene dos etapas e interruptores de cuatro cuadrantes, por lo que se vuelve una opción costosa. El convertidor flyback de cuatro cuadrantes es complicado de operar y costoso en su implementación, io anterior debido a la necesidad de identificar el cuadrante en el que esta operando; además su capacidad en potencia esta limitada. Por lo anterior la mejor topología para un SA1 es el inversor elevador.
1.3 Estrategias de control para convertidores caca La técnica de control utilizada en el inversor es la que determina las
características de distorsión armónica en la tensión de salida, así como la buena respuesta dinámica ante cambios de carga. En la literatura se han reportado diversas estrategias; en esta sección se describen desde las técnicas tradicionales hasta algunas técnicas modernas utilizadas para el control de inversores, normalmente aplicadas al inversor reductor tradicional.
1.3.1 Técnicas tradicionales
Las estrategias de control tradicionales se basan en la modulación de anchura de pulso (PWM, por sus siglas en inglés). Dicha modulación tiene como objetivo generar un patrón de conmutación para los interruptores del inversor, de manera que éste produzca una tensión de salida con un bajo contenido armónico; reduciéndose así el tamaño del filtro. La modulación de anchura de pulso puede ser de tipo PWM programado [11] y el PWM senoidal [12,13].
Estos esquemas hacen compensaciones cada medio ciclo de línea o utilizan un compensador PI que regula un voltaje promedio o efectivo, resultando en un sistema con una d inhica muy pobre, por io que las distorsiones causadas por una carga no lineal (puente rectificador y filtro) no pueden ser compensadas [14].
1.3.2 Otras técnicas de control
En la literatura se han reportado otras tecnicas de control para controlar a los inversores. Estos esquemas no regulan la tensión efectiva de salida, sino la tensión instantánea logrando una gran mejoría en la respuesta dinámica y distorsión armónica de la tensión de salida. Normalmente estas técnicas han sido estudiadas en el inversor tradicional o reductor, ya que el inversor elevador es un convertidor relativamente nuevo.
En este apartado se discuten desde técnicas de control no lineal basadas en desacoplar variables del sistema hasta técnicas de control basadas en redes neuronales.
10
ESTADO DEL ARTE
1.3.2.1 Estrategias aue desacoplan variables
En [15] se presentan una variedad de técnicas de control para el inversor tradicional que retroalimentan la corriente de salida, corriente en el inductor y otras variables además de la tensión de salida. Esta gama de lazos de retroalimentación permiten obtener una buena dinámica en la tensión de salida. En la Fig 1.16 se presenta uno de los esquemas más sencillos de los mostrados en [15], donde sólo se retroalimenta la corriente del capacitor y la tensión de salida.
Figura 1.16 Controlador con desacoplo de la tensión de salida propuesto en [15].
Si se observa el modelo del sistema a controlar (Fig 1.16), existe una parte donde se resta la tensión de salida (e,) a la entrada del sistema (ei), por lo que para desacoplar el sistema con respecto a la tensión de salida, la ley de control incluye un lazo de la tensión de salida que se suma a un nodo, desacoplando así ai sistema de cualquier variación de la tensión de salida .
Lo restante del controlador son la retroalimentación de compensadores PI y P del error de la tensión de salida y el error de la corriente en el capacitor respectivamente. El retroalimentar la corriente del capacitor permite eliminar el uso de retroalimentación de la comente del inductor y la comente de salida, obteniéndose una buena respuesta dinámica, ya que es como sensar indirectamente ambas comentes puesto que en el sistema (Fig 1.16) se restan para formar la comente en el inductor.
En [ 161 se utiliza una técnica de control que está contenida en la ley de control anterior. Se eliminan algunos lazos de control, e incluso se elimina el término que
ESTADO DEL ARTE
desacopla la tensión de salida del sistema. A pesar de estos cambios se logra obtener una buena respuesta dinámica, lo cual muestra lo relativamente fácil que es controlar el inversor tradicional. El esquema de control utilizado en [ 161 se muestra en la Fig. 1.17.
- í , s e n ( y t )
.
Generador -- de Tiempo Muem y
Circuito de Cmtrnl
Figura 1.17 Controlador sin desacoplo de la tensión de salida propuesto en [ 161.
En [17] se muestra una ley de control para el inversor elevador bajo el mismo principio de desacoplar variables. Dicho esquema retroalimenta variables como tensión de entrada, comente de salida, comente del inductor y tensión de salida. El esquema de control se muestra en la Fig. 1.18
El controlador está dividido en dos partes: un lazo de comente interno y un lazo de tensión externo. Para el lazo interno se hace lo siguiente: primero se desacopla la tensión de salida del sistema (para ello la ley de control contempla una división entre la tensión de salida); segundo, para desacoplar el sistema de la tensión de entrada ésta se suma a la ley de control y finalmente se utiliza un compensador PI del error de comente del inductor. Para el lazo externo se utiliza un multiplicador y divisor para desacoplar el sistema de las variaciones del ciclo de trabajo (1-d). Para desacoplar las perturbaciones de la corriente de salida ésta es sumada a la ley de control, y finalmente se utiliza un compensador PI del error de tensión.
Esta técnica de control logra un buen desempeño de la tensión de salida en el inversor elevador, pero a costa de sensar la comente del inductor, la corriente de salida, la tensión de entrada y la tensión de salida, además de utilizar dos multiplicadores y un divisor, todo esto por una rama del inversor elevador (la otra rama sólo comparte el sensado de dos variables). El uso de tantos multiplicadores y sensado de variables hace impráctico y costoso el uso de esta técnica de control para el inversor elevador.
ESTADO DEL ARTE
Figura 1.18 Controlador basado en desacoplar variables para el inversor elevador.
1.3.2.2 Estrategias de control discreto
En [ 18-23] se presentan diversas técnicas de control discretas para el inversor tradicional. En [18,19,20] se describen técnicas de control basadas en el concepto denominado "deadbeat", la cual es una técnica totalmente discreta. Esta técnica ofrece una buena respuesta dinámica en la tensión de salida, ya que se retroalimenta la tensión instantánea de salida.
La ley de control tiene la siguiente forma :
u(k ) =-@A, *v(k)-&&, * G ( k ) + v " J ( k + x
donde: g , son constantes v (k ) tensión de salida v , ( k ) referencia de la tensión de salida
13
ESTADO DEL ARTE
Para no derivar la tensión de salida en [ 181 se sensa la comente del capacitor que es proporcional a la derivada de la tensión de salida. Después de ufi) se utiliza un generador PWM digital, cuya implementación se describe en [24].
En [20] se presenta una estrategia basada en el concepto “deadbeat” pero desacoplando la corriente de carga utilizando estimadores. En [32] se presenta otra ley de control basada en el concepto “deadbeat”, la cual incluye el desacoplo de la tensión de salida y la corriente de carga.
En [21-231 se presentan la técnica del control por modos deslizantes en su versión discreta para controlar el inversor tradicional. Dicha teoría puede ser implementada digital o analógicamente [14] y ofrece una buena respuesta dinámica al sistema retroalimentado. El control por modos deslizantes parte de la definición de una superficie deslizante, dentro de la cual el sistema debe mantenerse y llegar ai punto de equilibrio. El control por modos deslizantes se describe con mayor detalle en el capítulo tres. En los artículos [22-231 se hacen pequeñas variantes en la superficie deslizante utilizada.
La implementación de un controlador discreto puede verse con ventajas y desventajas, pero es sólo el método de implementación, ya que las técnicas de control analógicas también pueden implementarse en su versión discreta.
1.3.2.3 Más estrategias de control
En [25] se utiliza una técnica de control basada en un lazo H _ , esta técnica de control se utiliza como un medio para encontrar un controlador robusto, el cual pueda tolerar incertidumbre en el modelo tan grande como le sea posible. Esta técnica no es tan popular como los métodos propuestos en [ 151 que están basados en compensadores PiD [25]. Esto se debe al grado del controlador H- resultante, el cual es muy grande para ser implementado por un circuito analógico, y la obtención del controlador envuelve una manipulación compleja de las funciones de transferencia del sistema; además aún no ha sido desarrollado un algoritmo numérico general y confiable [25].
Recientemente en [26] se presenta una técnica de control basada en redes neuronales. En dicho artículo se controla el inversor tradicional y se presentan buenos resultados ante una carga no lineal. Dicha técnica está basada en la retroalimentación de diversas variables las cuales son tensión de salida, comente de salida y comente del capacitor. El diseño de estos controladores está basado en el conocimiento del sistema, lo cual hace no muy popular esta técnica. Normalmente se implementa con circuitos digitales, pero en [26] se presenta una implementación analógica relativamente complicada.
14
ESTADO DEL ARTE
En [27] se presenta un controlador basado en la teoría de pasividad. El control por pasividad se basa en la propiedad fundamental de disipación de energia de los sistemas fisicos. Si un sistema es pasivo, es relativamente “fácil” de controlar [28]. En electricidad los elementos resistivos son los que disipan la energia y determinan la pasividad de un sistema. Por las razones anteriores, esta técnica es atractiva para el control de sistemas electrónicos de potencia.
En [5,6 y 291 se utiliza el control por modos deslizantes (SMC, por sus siglas en inglés) para el inversor elevador. La ley de control obtenida por la técnica de estructura variable permite obtener un sistema robusto ante variación de parámetros, estabilidad ante cambios bruscos de tensión de entrada y carga, buena respuesta dinámica y además fácil implementación [30,31]. Es por ello que esta técnica es atractiva para el control de sistemas electrónicos de potencia. Recientemente en [32] se propuso una variante del SMC para el inversor elevador que no utiliza sensores de corriente.
Las técnicas de control por pasividad y modos deslizantes se detallan posteriormente con mayor profundidad en otro capítulo.
1.3.3 Resumen
Existe una gran variedad de técnicas de control reportadas en la literatura, pero por supuesto hay diferencias importantes entre ellas. De las características buscadas dentro del trabajo de tesis son la buena respuesta dinámica, robustez, factibilidad en la implementación y el por Último el costo. Una de las técnicas que ofrecen buenas características es el control basado en pasividad, otra de las técnicas y que además tiene una fácil implementación es el control por modos deslizantes. En busca de disminuir el costo las técnicas que utilicen un mínimo de sensores de corriente se vuelven importantes.
1.4 Esquemas de SA1 reportados en la literatura
Los esquemas presentados en esta sección son los más representativos de los SAI’s reportados en la literatura por otros autores: empezando por un esquema de SA1 pasivo que no corrige el factor de potencia hasta los S A ‘ S interactivos que demandan una comente tal que el factor de potencia es alto. Estos esquemas se presentan de acuerdo a la clasificación de la norma internacional IEC 62040-3 [3], la cual se discute en el Apéndice A.
ESTADO DEL ARTE
1.4.1 Esquema de SAIpasivo
En 1989 Salvador Martínez et al. presentan en [33] un SAI pasivo (fuera de línea) que utiliza un trasformador de tres puertos; el esquema permite una buena regulación de la tensión de salida (no significa buena respuesta dinámica), así como también una rápida transferencia del modo normal al modo de energía almacenada (respaldo) y viceversa. En la Fig. 1.19 se muestra el circuito de potencia utilizado en este SAI.
Este esquema de SAI pasivo es relativamente sencillo desde el punto de vista de que el inversor es operado en una forma simple (tensión de salida casi-cuadrada) y no corrige el factor de potencia. Además se utiliza un trasformador de baja frecuencia, el cual resulta pesado y voluminoso. El SA1 presentado en dicho artículo es de 1500VA, ocho minutos de respaldo y con un peso de 85Kg.
o T&.s tDPd
1wI mv+i+m.
RE L o 7
I . 4.2
Figura 1.19 SAi pasivo reportado en [33]
Esquemas de SAI de doble conversión
En este apartado se discuten tres esquemas de SAI de doble conversión, donde emplean transformadores de alta frecuencia para disminuir el peso y volumen del SAI.
1.4.2.1 Esauema con cuatro etauas
El primer esquema discutido es el reportado en [34]. Dicho esquema utiliza múltiples etapas con el propósito de demandar una comente con un alto factor de
16
ESTADO DEL ARTE
potencia, utilizar un bus de baterías de baja tensión (36V), e incluir aislamiento. El circuito de potencia se muestra en la Fig. 1.20.
El esquema utiliza como primer etapa un convertidor cdícd elevador, el cual es utilizado como corrector del factor de potencia, posteriormente es utilizado un convertidor con un trasformador de alta frecuencia de tres puertos, un convertidor flyback y finalmente un inversor de polaridad.
Figura 1.20 SAi de doble conversión reportado en [34]
El bus de cd de salida es utilizado para controlar la carga de la batería, ya que hacerlo con el convertidor de tres puertos es muy complejo. El convertidor de tres puertos es un convertidor bidireccional en corriente que permite la carga de la batería, incluyendo aislamiento, y la descarga de ella por el mismo transformador (modo energía almacenada). La tensión de salida (V,f) , que va hacia la carga, es una tensión senoidal rectificada con el propósito de que el inversor que le sigue sólo sea de polaridad, lográndose así una mejor eficiencia por esta etapa. El flyback se utiliza sólo en caso de cargas ligeras y cargas inductivas, con el fin de que la tensión de salida no se deforme ya que la tensión V,, es producida por un puente de diodos que no es bidireccional en corriente.
Este esquema presenta múltiples etapas por lo que el costo se incrementa y la confiabilidad se reduce.
17
ESTADO DEL ARTE
1.4.2.2 Esauema con integración de etapas
En [35] se muestra un esquema de SAI similar al anterior. En cuanto a la etapa del cargador de batenas, se utiliza un convertidor bidireccional en comente. En la Fig. 1.21 se presenta el diagrama del SAI completo.
t
...... "" .................
............................................
Figura 1.21 S A I de doble conversión reportado en [35].
En este esquema se utiliza un convertidor reductor-elevador integrado al inversor medio puente para demandar una corriente con un alto factor de potencia. Este inversor es utilizado para cargar la batería además de proporcionar un bus de cd para un inversor puente completo. El inversor puente completo se alimenta directamente del bus de cd producido por el inversor medio puente, por lo que no hay aislamiento entre la tensión de entrada y la tensión de salida.
Este SAI está pensado sólo para cargas no lineales, por lo que la salida no es una senoide, sino una tensión alterna con forma trapezoidal. Este tipo de tensión de salida permite tener una factor de cresta menor que con una tensión de salida senoidal.
18
ESTADO DEL ARTE
El esquema presenta múltiples etapas, aunque por supuesto están integradas, por lo que se sigue manteniendo un alto costo y baja confiabilidad, además de no incluir aislamiento entre la entrada y la salida.
1.4.2.3 Esauema con tres etauas
En [36] se propone un SAI que utiliza un convertidor con un transformador de alta frecuencia de tres puertos. Este esquema, debido al uso de un circuito de control complejo, logra demandar una comente con un alto factor de potencia sin necesidad de una etapa adicional como en los esquemas anteriores. En este esquema el inversor es operado en su forma tradicional. El circuito del SAI se muestra en la Fig. 1.22.
Figura 1.22 SAI de doble conversión reportado en [36].
Este esquema es de los más sencillos por el número de etapas que io compone, comparados con otros reportados en la literatura, pero tiene la desventaja de ser relativamente complicado de controlar, ya que el mismo convertidor debe producir una tensión razonable para el inversor, debe corregir el factor de potencia y ai mismo tiempo cargar la batería, todo esto en modo normal de operación. El esquema utiliza un detector de falla de línea para determinar cuándo el convertidor debe operar en modo de energía almacenada.
19
ESTADO DEL ARTE
En [37], este esquema es comparado con cuatro topologías de SAI, desde las ferroresonantes hasta las que utilizan cuatro etapas con transformador de alta frecuencia. En dicho artículo se muestra que este esquema mejora eficiencia, peso, volumen, entre otros aspectos, comparado con los esquemas ahí mencionados debido a la reducción de etapas.
1.4.2.4 Esquema con tres etauas con alta eficiencia
En [38] se presenta. un esquema de SAI de pocas etapas de alta eficiencia, sólo que el bus de baterías utilizado es de alta tensión. En modo normal de operación prácticamente casi sólo una etapa es la encargada de realizar la conversión, por io que se obtiene una muy alta eficiencia. El circuito del SA1 se muestra en la Fig. 1.23.
Figura 1.23 SAi de doble conversión reportado en [38].
La primer etapa es un convertidor cd/cd puente completo, que produce una tensión de salida senoidal rectificada, posteriormente se le conecta un inversor de polaridad para obtener a la salida una tensión senoidal, por lo que la eficiencia es alta. Como este esquema por sí solo no corrige el factor de potencia se le conecta un compensador después del convertidor cdcd puente completo, con la intención de compensar la comente demandada por la carga para que el convertidor cdcd puente completo la vea como una carga resistiva, y de manera natural entonces la comente demandada a la línea sea con un alto factor de potencia. El compensador dinámico
20
ESTADO DEL ARTE
también es utilizado para cargar la batería; además es utilizado para producir una tensión senoidal rectificada cuando el SAI opera en el modo de energía almacenada.
Este es un esquema muy sencillo y de alta eficiencia por su modo de operación, pero utiliza un bus de baterías muy grande para operar.
1.4.2.5 Esquema con dos etaDas
En [39] se presenta un esquema relativamente tradicional, ya que utiliza un transformador de baja frecuencia y un bus de baterías de no tan alta tensión (lOOV), se introduce el concepto de tensión alterna trapezoidal para cargas no lineales como una opción para ese tipo de cargas. En la Fig. 1.24 se muestra el esquema.
Figura 1.24 S A I de doble conversión reportado en [39].
La tensión de entrada es rectificada y posteriormente sólo es modulada para obtener una tensión alterna trapezoidal. Esta tensión es elevada con un transformador de baja frecuencia con una relación de 1:1.5, además de introducir aislamiento. Un capacitor de almacenamiento se conecta al bus de línea rectificado para alimentar al cargador de baterías. Cuando ocurre una falla en la línea de alimentación, la batería se conecta al inversor para producir la tensión de salida.
El esquema no demanda una comente con un alto factor de potencia a la línea de alimentación, pero como sólo está pensado para cargas no lineales del tipo puente rectificador + capacitor, y la tensión de salida es trapezoidal, la corriente finalmente demandada a la línea tiene una bajo contenido armónico que cumple con la norma EC 555.
Este es el único esquema de SAi que está pensado en sólo pasar la norma, por lo que el número de etapas se reduce, pero sigue siendo voluminoso y pesado debido al uso de un transformador de baja frecuencia.
CFNTQT, DE iNFORMAClON ”““I SEP CENIDET
21
I
ESTADO DEL ARTE
1.4.3 Esquemas de SAI interactivos
Los esquemas de SAi interactivos permiten una reducción considerable en el número de etapas, pero se pierde el aislamiento entre la tensión de entrada y salida. Algunos esquemas permiten utilizar un bus de baterías de baja tensión, pero a costa de un transformador de baja frecuencia o bien utilizando el inversor elevador.
1.4.3.1 Esauema con inductor de baja frecuencia
En [40] se presenta un SAI interactivo que utiliza un bus de baterías de alta tensión. Sólo se utiliza un inversor tradicional, el cual permite cargar la batería y entregar la tensión de alterna necesaria a partir de la batería en caso de falla de la tensión de línea. El circuito se muestra en la Fig. 1.25.
Figura 1.25 Esquema de S A i interactivo reportado en [40]
Este esquema permite corregir el factor de potencia controlando adecuadamente el defasamiento de la tensión de línea y la tensión producida por el inversor. Para lograr la corrección, el inductor ubicado entre la línea de alimentación y el inversor debe ser relativamente grande y diseñado a baja frecuencia, resultando el sistema pesado y voluminoso.
Es un esquema sencillo, pero además de perderse aislamiento se utiliza un inductor de baja frecuencia, un bus de batería muy grande y no permite un buen manejo de ella. Este esquema no permite el uso de un interruptor de transferencia, ya que la tensión de entrada y salida están defasadas de forma natural.
22
ESTADO DEL ARTE
1.4.3.2 Esquema con transformadores de baia frecuencia
En [41] se presenta un SAI interactivo que evita el uso de un bus de baterías muy alto y el uso de un inductor muy grande en serie con la línea de alimentación, pero utiliza dos transformadores de baja frecuencia. El circuito de este esquema se muestra en la Fig. 1.26.
El esquema utiliza dos inversores push-pull. Uno de los inversores se encarga de cargar la batería y corregir el factor de potencia, este inversor también suministra la tensión de salida en caso de falla de la línea de alimentación. Para partir de un bus de baterías pequeño se utiliza un trasformador de baja frecuencia. El segundo inversor se conecta como un filtro activo de tensión, en serie con la tensión de línea, con el propósito de compensar las variaciones de la tensión de entrada.
Este esquema utiliza un bus de baterías bajo, además de que la tensión de línea está en fase con la tensión de salida, lo cual permite el uso de un interruptor de transferencia para darle mantenimiento al SAI. La desventaja es que utilizan transformadores de baja frecuencia, lo cual lo hace pesado y voluminoso, además de dar un mal manejo a la batería.
Figura 1.26 Esquema de SAI interactivo reportado en [41]
1.4.3.3 Esquema basado en el inversor elevador
En [42] se utiliza el inversor elevador como opción para eliminar el uso de un trasformador de baja frecuencia y seguir manteniendo un bus de baja tensión. El circuito se muestra en la Fig. 1.27.
El esquema utiliza dos inversores elevadores compaaiendo una misma rama, uno de los inversores es utilizado para demandar una comente a la línea de
23
ESTADO DEL ARTE
alimentación con un alto factor de potencia, y el otro se utiliza para suministrar energía a la carga en caso de falla de la línea de alimentación. La principal desventaja de este esquema es que no da un buen manejo de la batería.
Figura 1.27 Esquema de SAi interactivo reportado en [42]
1.4.4 Resumen
Existen una gran variedad de esquemas reportados en la literatura con diversas características. Los mejores esquemas para sistemas de alimentación de baja potencia son aquellos que tienen un menor número de etapas para mejorar la eficiencia, un menor número de componentes para disminuir el costo, un bus de baterías pequeño para disminuir el peso y volumen, y un sencillos en su forma de operación. Con estas características los mejores esquemas son los reportados en [34-391
1.5 Propuesta de tesis Como se planteó anteriormente, los esquemas de un SAI presentan, entre otros,
dos problemas importantes: uno en cuanto a eficiencia y otro en cuanto a respuesta dinámica.
Para mejorar la eficiencia en los esquemas de SAI 's se propone utilizar topologías de inversor que tengan la capacidad de elevar tensión, como el inversor elevador, con la intención de proponer esquemas de SAI con pocas etapas. Para obtener una buena respuesta dinámica se propone utilizar estrategias de control aptas para sistemas no lineales y sencillas de implementar como el control por modos deslizantes.
24
ESTADO DEL ARTE
Inversores con capacidad de elevación.
En la literatura se ha propuesto el inversor elevador para esquemas de SAI. El uso de este convertidor permite que la eficiencia se mejore, ya que no se tienen dos o más etapas en cascada para realizar esta función. Otra ventaja adicional, debida a esta reducción de etapas, es que el número de componentes se reduce y por lo tanto disminuye el costo.
Sólo se ha estudiado el inversor elevador que se deriva de dos convertidores cdcd elevadores conectados como lo muestra la Fig. 1.5. La idea de cómo se construye dicho inversor permite obtener diversas topologías de inversores sin perder la capacidad de elevación. En la presente tesis se estudian las posibles variantes de inversores con capacidad de elevación, lo cual se aborda en el Capítulo 2 . Así mismo se estudia la extrapolación del inversor elevador trifásico, el cual fue abordado recientemente en [43], pero esto es tratado en el Apéndice B.
Estrategias de control.
Como se mostró anteriormente, en la literatura se han reportado distintas estrategias de control, algunas de ellas presentan diversas desventajas como utilizar muchos puntos de sensado, o bien no son capaces de realizar compensaciones en tiempos inferiores a medio ciclo de línea.
En esta tesis se propone estudiar e implementar técnicas de control aptas para sistemas no lineales que permitan ofrecer una buena respuesta dinámica además de una sencillez en la implementación. Se analizan el control por modos deslizantes (SMC por sus siglas en inglés), la técnica de control basada en pasividad, una técnica de control no lineal que permite eliminar el uso de sensores de comente, y además algunas variantes de ellas. El estudio de las diversas técnicas de control se presentan en el capítulo 3.
Esquemas de SAI.
Finalmente, en el desarrollo de la tesis también se proponen e implementan algunos esquemas de S A i , basados en el inversor elevador. Esta parte se detalla en el capítulo 4. Los SAi implementados son esquemas de doble conversión, que permiten un buen manejo a la batena. Dichos esquemas utilizan un mínimo de etapas para realizar la conversión debido ai uso del inversor elevador, y por io mismo se utiliza un bus de batería de baja tensión.
25
ESTADO DEL ARTE
Por lo anterior, la contribución de la tesis consiste en tres puntos:
1.
2.
3.
Primero es el estudio de los inversores con capacidad de elevación más sencillos, puesto que son los que realmente ofrecen mejoras en cuanto al costo. Se presenta el análisis de dichos esquemas, concluyéndose cual es la mejor topología, además de establecer procedimientos de diseño. También se presentan resultados experimentales.
El segundo punto es el estudio e implementación de diferentes técnicas de control para el inversor elevador. Se proponen diferentes controladores partiendo de herramientas conocidas. Se describe la forma de implementación y se enfatizan las ventajas y desventajas de las técnicas implementadas. Para lo anterior se construyeron prototipos experimentales de cada controlador.
El tercer punto es proponer y estudiar diversos esquemas de SAI que utilicen el inversor elevador, para comprobar si realmente se obtiene una mejora con respecto a los esquemas reportados en la literatura. Los esquemas propuestos son comparados con otros esquemas en cuanto a numero de etapas, componentes, tensión del bus de baterías, y eficiencia entre otros.
26
Capítulo 2
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN
En este capítulo se presenta la teoría de operación de los inversores con capacidad de elevación, los cuales están basados en convertidores cdícd. Se aborda el inversor elevador y el inversor reductor-elevador; así mismo se plantea el procedimiento de diseño de ambos inversores. Por último se hace un estudio de las características de dichos convertidores.
21
DESARROLLO DE NVERSORES CON CAPACIDAD DE ELEVACION.
2.1 El inversor elevador
Los convertidores cdcd elevadores dentro del inversor elevador son bidireccionales en corriente y por consiguiente operan sólo en modo de conducción continua (MCC). El convertidor cdcd elevador (Fig. 2.1) en MCC tiene las siguientes funciones de ganancia en términos del ciclo de trabajo (6) [4]:
1 - v a
Vi, 1-d'
El ciclo de trabajo d se define como el tiempo de encendido del interruptor ton entre el tiempo de encendido más el tiempo de apagado ton + tog. Si el convertidor es operado a una frecuencia constante, el periodo es ton + tof (Fig. 2.2) y el ciclo de trabajo se varia a través del tiempo de encendido ton.
Figura 2.1 Convertidor cdcd elevador.
Señal para el interruptor f
tiempo I
- 7 L L - I Figura 2.2 Señal de control para el interruptor.
28
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N.
j C
j d
La obtención de (2.1) y (2.2) supone una máxima transferencia de energía y que el sistema está en estado estacionario, además de que los interruptores son ideales. Para hacer uso de estas fórmulas se debe considerar una frecuencia de conmutación alta, en ordenes de magnitud mayor a la frecuencia de red (60Hz).
El inversor elevador se puede operar de dos maneras [SI: la primera es utilizar una señal de control base para todos los interruptores, a esta forma se le llama modo I de operación; y la segunda es utilizar dos señales de control independientes, una para cada rama de interruptores, a esta forma se le llama modo I1 de operación. Sólo se detalla la segunda forma de operación, ya que es la que se utilizará en el desarrollo de la tesis; para mas detalles en la otra forma de operación se puede consultar [SI.
2.1.1 Forma de operación
C -I i
i -I __ __ __ __
La forma de operación utiliza dos señales de control para los cuatro interruptores, una para cada rama (Fig. 2.3). Para el análisis del convertidor se utilizan las ecuaciones (2.1) y (2.2) que están expresadas en términos del ciclo de trabajo (d) y se consideran a los interruptores ideales.
29
DESARROLLQ DE INVERSORES CON CAPAClDAD DE ELEVACl6N.
voltaje en el Capacitor (Va) 2501
Figura 2.4 Tensión deseada en el capacitor.
Un convertidor cdícd elevador no puede generar tensiones inferiores al voltaje de entrada V,, es por ello que en este modo de operación se debe tener cuidado para escoger Vdc. Este valor debe ser escogido de manera que permita generar la tensión de salida deseada. Para ello se define una ganancia máxima como:
dónde vOp = es el valor pico de la tensión de salida.
La tensión de salida del inversor es el doble de la tensión senoidal de cada uno de los convertidores cdícd elevadores sin la componente de continua, ya que la tensión senoidal de cada rama está defasada 180" y la componente continua es la misma. Por ello la tensión senoidal producida por cada rama del inversor debe tener un valor pico de V,,/2 para producir una tensión de salida senoidal con valor pico de Va,.
Por lo anterior el valor de la componente de continua (Vdc) de la tensión de rama del inversor debe ser mayor que la tensión de entrada mas la mitad del valor pico de la tensión de salida deseada:
+Y" v >-+v=- VOP GI Y. 2 In 2 dc - (2.4)
Es importante resaltar que la componente de continua v d c debe ser mayor, en unos cuantos volts, a lo obtenido con (2.4) utilizando la igualdad, esto para evitar una la saturación del convertidor debida al rizado de la tensión del capacitor o bien ante un cambio de carga. Esta tensión extra se denominó holgura en [SI.
30
La función de ganancia (2.1) y (2.4), se obtiene como:
DESARROLLQ DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
entraddsalida para este modo de operación, junto con
2V,, - G,,, V,, v, =2v0-2V,,=-- 2Yn 1-d
2 vo - Vi" I-d
2-G,
La figura 2.5 muestra la gráfica de la función de ganancia entradaísalida contra el ciclo de trabajo. Se puede observar que se limita la capacidad de elevación, la cual depende del valor de la ganancia máxima con que se diseñe.
Figura 2.5 Función de ganancia para G, = 5.
Por definición del modo de operación, la tensión en uno de los capacitores es:
VQP v, = V,, + - sen (W t ) 2
A partir de (2.1) y (2.7) se puede obtener la forma del ciclo de trabajo:
De aquí, el ciclo de trabajo máximo ocurre en wt = 4 2 :
(2.7)
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N.
Haciendo un balance de energía de una de las ramas del convertidor se obtiene la comente del inductor:
(2.10) . v a i, = i o - 'in
donde io es la comente de salida.
Se observa que la forma de la comente del inductor no sólo depende de la tensión en la rama del inversor elevador, sino también de la carga. En el caso de una carga resistiva y utilizando (2.5), (2.7) y (2.10) se obtiene:
1, . - v o va - 2 { v o - v d c } & - x - - sen(ot) { 2 . Vd, +-sen(ot) } (2.1 1) R 'in R 'in R 'in
Y utilizando (2.3), (2.4) y (2.1 1) se obtiene:
(2.12)
Puesto que sen' (U t ) = 1/2{1- cos(2w t ) } la ecuación (2.12) puede verse también como una senoide más un segundo armónico con una componente de cd (seno cuadrado). En la figura 2.6 se muestra la forma de la comente del inductor que se obtiene de (2.12).
30TCorriente en el Induetoi
O 0.01 0.02 0.03
Figura 2.6 Comente en el inductor
32
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI6N.
De (2.7) y (2.12) se pueden obtener los valores máximos de la tensión del capacitor y la corriente del inductor respectivamente, que ocurren en ut = 4 2 , por lo tanto:
va, = v,, + ~ 'Op = Vi, (I + G,) 2
(2.13)
(2.14)
De (2.12) se puede obtener el valor efectivo de la corriente del inductor, sabiendo que se puede descomponer en una componente de continua, una fundamental y un segundo armónico:
1- = JIL + + ILms (2.15) donde
es la componente continua de la comente 1 =- GmVq 4R L d C
es la comente efectiva de la componente - (G, + 2)VOP
2&R I,,, -
fundamental
es la corriente efectiva del segundo armónico - GmVop I L h S - __ 4&R
Simplificando se obtiene que:
(2.16)
El presente análisis define la evolución de la tensión en el capacitor y la comente en el inductor en estado estacionario. Dicho análisis, como se verá en la siguiente sección, sirve para determinar los valores de capacitancia (C) e inductancia (L) del convertidor, así como también para dimensionar los interruptores y diseñar los inductores.
21.2 Diseño
El inversor elevador se diseñará con una tensión efectiva de salida de 120 V, tensión de entrada de 48V, Po= 300W. Por lo tanto V,, es aproximadamente 170 V, y utilizando (2.3) y (2.4) se obtiene:
33
DESARROLW DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
El valor de Vdc es preferible que sea un poco mayor a 133V, ya que de lo contrario el diseño sería demasiado holgado, para simplificar el diseño se realizará con v d c 133V. El ciclo de trabajo máximo se obtiene sustituyendo G, en (2.9):
D,, = 0.7797 = 0.78
La corriente máxima y efectiva del inductor del inductor están determinadas por (2.14) y (2.16) respectivamente, sustituyendo G,, V, y sabiendo que la carga es R = VOL, /Po se obtiene:
I,, =16 A
I,, = 7.92 A
La tensión máxima del capacitor está determinada por la ecuación (2.13), resultando:
Vap = 217.92 V
Con los valores anteriores se dimensionan los interruptores que se utilizarán, pero sin perder de vista que la frecuencia de conmutación debe ser mayor a 20KHz para evitar la región audible y que los diodos deben tener un tiempo de recuperación inversa muy pequeño por tratarse de un convertidor elevador. Se escogieron IGBT's con un diodo en antiparalelo con un tiempo de recuperación inversa muy pequeño (G20N60B3D), y que soportan la corriente efectiva y pico del inductor, así como la tensión máxima del capacitor.
El cálculo de la inductancia y la capacitancia se hace con las ecuaciones fundamentales que determinan su comportamiento, sólo debe proponerse el rizado deseado [17]. El rizado sugerido para el inductor contempla una compensación de los valores reales de corriente máxima del inductor, ya que cambia debido a la holgura que debe incluirse en Vdc y el análisis no lo contempla con el fin de simplificar el diseño. Las ecuaciones para el cálculo de la inductancia y capacitancia son:
(2.17)
(2.18)
34
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
donde: 2P
I, =-- o - Corriente pico de salida máxima.
.f, = Frecuencia de conmutación. Vw
Sustituyendo los valores obtenidos en (2.17) y (2.18) y utilizando una frecuencia de conmutación de 30kHz, que es la frecuencia optima de operación de los IGBT's seleccionados, se obtiene:
L =354.54p H = 360 pH , y C = 21.05pF = 21pF
En la tabla 2.1 se resumen los pasos para diseñar al inversor elevador.
Tabla 2.1 Pasos de diseño del inversor elevador.
Pasa I I Datos de entrada
Vi", Po 9 v,,,
Paso 2
Dato de entrada
Depende del dispositivo
seleccionado
Calcular la tensión pico de de salida. Ganancia del convertidor y componente de directa de la rama del inversor.
Vop,G, 9 Vdc Y R
Calcular el ciclo de trabajo máximo.
Calcular la corriente pico y efectiva dt inductor, y la tensión máxima di capacitor.
Con estos datos debe dimensionarse 10 interruptores, sin perder de vista que c diodo debe ser rápido y que la fiecuenci de conmutación sea mayor a la regó audible.
Calcular la inductancia y capacitancia df inversor.
L Y C
Formula(s)
vop = Jzv,, 1 1
R = V:- /Po
V, =V,,(I+G,)
35
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
2.1.3 Resultados experimentales
Con el propósito de comprobar que el desarrollo anterior concuerda en la práctica, el inversor elevador fue implementado experimentalmente. En esta sección se muestran algunos resultados experimentales del inversor elevador. La técnica de control utilizada en los resultados mostrados en esta sección es el control por modos deslizantes, la cual se detallará en el capítulo siguiente.
a) b) Figura 2.7 Formas de onda experimentales del inversor elevador. a) tensión de rama y corriente
de inductor, b) tensión y corriente de salida, tensión de rama
En la Fig. 2.7 se muestran las formas de onda experimentales del inversor elevador diseñado en el punto anterior. La holgura en Vdc fue minimizada con el propósito de evitar demasiada incongruencia con io obtenido en la sección anterior. En la figura se puede apreciar el valor máximo de la tensión de la rama del inversor y el valor máximo en la comente del inductor, así mismo se aprecia el rizo de la comente del inductor.
2.2 El inversor reductor-elevador
El inversor reductor-elevador es nombrado así por el hecho de que está derivado del convertidor cdcd reductor-elevador, pero este inversor tiene la misma capacidad de elevación que el inversor elevador. El inversor reductor-elevador tiene un comportamiento similar al inversor elevador, las diferencias son mínimas. Básicamente las diferencias son que el inversor reductor-elevador demanda una comente pulsante y el inversor elevador continua; que el esfuerzo en tensión del capacitor es un poco menor en el inversor reductor-elevador que en el inversor elevador.
36
DESARROLLO DE NVERSORES CON CAPACIDAD DE ELEVACIÓN.
El convertidor también puede ser operado en dos modos como el inversor elevador, pero sólo se describirá uno de sus modos, el modo en que cada convertidor
, debe producir una tensión senoidal montada en una componente de cd, con la senoide defasada en cada rama del convertidor.
El convertidor cdcd reductor-elevador (Fig. 2.8) en MCC tiene las siguientes funciones de ganancia, utilizando el concepto de ciclo de trabajo (d) [4,44]:
(2.19)
(2.20)
(2.21)
La obtención de (2.19), (2.20 y (2.21) supone una máxima transferencia de energía y que el sistema está en estado estacionario, además de que los interruptores son ideales. Para hacer uso de estas fórmulas se debe considerar una frecuencia de conmutación alta, en ordenes magnitud mayor a la frecuencia de red (60 Hz).
Figura 2.8 Convertidor c&cd reductor-elevador.
2.2.1 Forma de operación
Cada rama del inversor reductor-elevador es controlada de manera independiente (Fig. 2.9), la señal de control debe ser tal que el voltaje de salida sea una tensión senoidal (60 Hz) montada en una componente continua denominada Vdc (Fig. 2.10).
37
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI6N.
-I _-
Figura 2.9 inversor reductor-elevador.
voltaje en el capacitor V.,) 1
Figura 2.10 Tensión deseada en el capacitor.
Un convertidor cdcd reductor-elevador si puede generar tensiones inferiores al voltaje de entrada (Vi"), es por ello que v d c se define de otra manera. Se utiliza la ecuación (2.3) para definir, de igual manera que en el inversor elevador, la ganancia máxima (Gm). El valor de VdC se define como:
(2.22)
La tensión de salida del inversor, ya que la tensión senoidal de cada capacitor está defasada 180' y la componente continua es la misma, es el doble de la tensión senoidal de cada una de las ramas sin la componente de continua. Por lo tanto, la función de ganancia entraddsalida para este modo de operación, junto con (2.19) y (2.22), se obtiene como:
2d Gm 5-
Vi, I- d
(2.23)
(2.24)
38
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N.
La figura 2.1 1 muestra la gráfica de la función de ganancia entraddsalida contra el ciclo de trabajo. Es importante notar que es la misma gráfica que para el inversor elevador.
Figura 2.11 Función de ganancia del inversor reductor-elevador para G,=5
De igual manera, por definición, la forma de la tensión de la rama del inversor reductor-elevador es:
V va, = V,, + - sen (O t )
2 (2.25) OP
A partir de (2.19) y (2.25) se puede obtener la forma del ciclo de trabajo:
1 d = I + Vi,
VOP V,, + 7 sen (W t )
De aquí, el ciclo de trabajo máximo ocurre en ot = n/2 :
(2.26)
(2.27)
Es importante notar que el ciclo de trabajo máximo es idéntico al caso del inversor elevador.
Haciendo un balance de energía de una de las ramas del convertidor se obtiene que la comente de entrada de la rama es:
39
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI~N.
(2.28) - - f va,
Vi" 4", - 10
donde: io = Corriente de salida.
Utilizando la ecuación (2.21) y (2.28) se obtiene:
(2.29)
Donde se observa que la forma de la corriente del inductor no solo depende de la tensión en la rama del inversor elevador, sino también de la carga. En el caso de una carga resistiva y utilizando (2.23), (2.25) y (2.29) se obtiene:
Y utilizando (2.3), (2.25) y (2.30) se obtiene:
sen(wt)+-- '0' Gm sen'(@ t> R R 2 (2.31)
La ecuación (2.31) es idéntica a la obtenida en el caso del inversor elevador, ecuación (2.12), por lo que la corriente en ambos inversores tiene la misma forma. De (2.25) y (2.31) se pueden obtener los valores máximos de la tensión del capacitor y corriente del inductor respectivamente, los cuales ocurren en wt = 4 2 :
(2.32)
(2.33)
Con este análisis, se puede ver que la diferencia entre el inversor elevador y el inversor reductor-elevador es la tensión del capacitor de rama, el cual es menor para el inversor reductor-elevador; pero en todo lo demás el comportamiento es igual.
40
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVAC16N.
2.2.2 Diseño del inversor
El inversor reductor-elevador se diseñará con las mismas especificaciones que el inversor elevador: una tensión efectiva de salida de 120 V, tensión de entrada de 48V, Po= 300W. Por lo tanto V,, es aproximadamente 170 V, y utilizando (2.3) y (2.22) se obtiene:
G, =3.54 y v,, 1 8 5 V
El ciclo de trabajo máximo se obtiene sustituyendo G, en (2.27):
D, = 0.7797 = 0.78
La corriente máxima del inductor está determinada por (2.33), sustituyendo G, y sabiendo que la carga es R = V,,,,, 1 P, se obtiene:
ILrP = 16 A
La tensión máxima del capacitor está determinada por la ecuación (2.32), resultando:
Varp = 169.92 V
El cálculo de la inductancia y la capacitancia se hace de igual manera que con el inversor elevador [46], resultando:
(2.34)
(2.35)
donde: I OP = 3 =Comente pico de salida máxima.
f, = Frecuencia de conmutación. "OP
Sustituyendo los valores obtenidos en (2.34) y (2.35) y utilizando una frecuencia de conmutación de 30KHz se obtiene:
L ~ 3 5 4 . 5 4 ~ H = 360m , y C = 27uF
41
DESARROLLQ DE INVERSORES CON CAPACIDAD DE ELEVACI~N.
2.2.3 Resultados experimentales
Con el propósito de comprobar que el desarrollo anterior concuerda en la práctica con el inversor elevador, en esta sección se muestran algunos resultados experimentales del inversor elevador. La técnica de control utilizada en los resultados mostrados en esta sección es el control por modos deslizantes.
En la Fig. 2.12 se muestran las formas de onda experimentales del inversor reductor-elevador, estos resultados son a una potencia de 200W, la holgura en Vdc fue minimizada con el propósito de evitar demasiada incongruencia con lo obtenido en la sección anterior. En la figura se puede apreciar el valor máximo (sin considerar rizado) en la corriente del inductor.
Figura 2.12 Formas de onda experimentales del inversor reductor-elevador. a) comente del inductor, b) tensión y corriente de salida
2.3 Características de los inversores con capacidad de elevación.
Los inversores con capacidad de elevación, a diferencia del inversor reductor, tienen un lazo de energía interno que incrementa el esfuerzo en corriente y por lo tanto dependiendo de la capacidad de elevación, este lazo de energía se vuelve contraproducente, ya que puede disminuir dicha capacidad de elevación.
2.3.1 Reciclado de energía
Como se vio en la sección anterior, el inversor reductor-elevador e inversor elevador son semejantes en su forma de operación, por lo que el análisis de flujo de la energía es muy parecido. Primero se presenta este análisis para el inversor elevador, ya que es más claro ver como recicla energía, y después para el inversor reductor- elevador.
42
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
Tomando al inversor elevador como un todo, la comente de salida para una carga resistiva está determinada por:
. v v,,sen(oO O R R 1 =o= (2.36)
dónde R = VO,, /Po es la resistencia para la potencia de salida
La corriente de entrada al inversor se puede calcular haciendo un balance de energía. Asumiendo las pérdidas despreciables, se obtiene:
(2.37)
Sustituyendo (2.36) y (2.3) en (2.37) resulta:
ii, = G, -sen2 VQP (OX) (2.38) R
Reescribiendo la ecuación (2.12) que corresponde a la comente del inductor se tiene:
sen(ot)+-- 'QP Gm sen*(mt) R 2 (2.39)
Por semejanza la corriente del inductor de la otra rama es parecida a (2.39), sólo cambia el signo del primer término debido al defasamiento de la tensión senoidal entre la ramas, resultando:
En la figura 2.13 se observa que la suma de las comentes de los inductores debe ser igual a la comente de entrada. Por simple inspección de (2.39) y (2.40) se puede ver que su suma efectivamente es igual a la obtenida en (2.38), pero es importante notar que esto se debe a la cancelación del término que contiene el seno sin elevar al cuadrado. En otras palabras, existe un término de comente que no se refleja en la comente de entrada, pero que si existe en los inductores.
43
DESARROLLO DE NVERSORES CON CAPACIDAD DE ELEVACl6N.
Convertidor B
Convertidor A
_. ^_..__..___..^_.__.....~.~~..~...
Figura 2.13 Inversor elevador.
Lo anterior significa que el inversor elevador recicla energía, a través de un lazo interno de comente, esto se ilustra en la Fig. 2.14. Este es el precio por elevar tensión, que se traduce en un mayor esfuerzo en comente y un poco más de pérdidas de las que podrían esperarse si ese lazo interno de corriente no existiera.
Figura 2.14 Flujo de energía del inversor elevador.
En el inversor reductor-elevador ocurre algo similar. El mismo balance de energía es equivalente para este convertidor, sólo que la comente de entrada de las ramas difieren un poco y son:
(2.41)
(2.42)
Se obtiene la misma conclusión, ya que existe un término que se cancela. Se puede notar que este término es menor que en el caso del inversor elevador. Pero
44
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
debido a la operación del inversor reductor-elevador, la corriente del inductor es igual que la del inversor elevador, por lo que el precio de elevar tensiones el mismo en los dos inversores.
2.3.2 Esfuerzos en los semiconductores y elementos pasivos
Basado en el análisis presentado en este capítulo se obtiene la Tabla 2.2, la cual resume los esfuerzos del inversor elevador y del inversor reductor-elevador en todos sus elementos. Se puede observar en la tabla que prácticamente los esfuerzos en los elementos es el mismo, excepto en el esfuerzo de tensión de los capacitores.
Podría pensarse que el menor esfuerzo en la tensión del capacitor es la ventaja del inversor reductor-elevador con respecto al inversor elevador, pero sabiendo que las especificaciones en tensión de los capacitores comerciales que se usm'an es de 250V, ya que el valor anterior es de 150V, la ventaja carece de importancia.
Tabla 2.2 Esfuerzos en los inversores con capacidad de elevación.
los semiconductores
Por otro lado, el valor de capacitancia del inversor reductor-elevador es mayor que la del inversor elevador, lo cual es una desventaja. También es importante resaltar que la comente de entrada del inversor reductor elevador es discontinua, por lo que la emisión de ruido es mayor que en el caso del inversor elevador. Es por ello que la mejor topología para elevar tensión e invertir a la vez es el inversor elevador.
45
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACI6N.
2.3.3 Andiisis de eficiencia
Los inversores con capacidad de elevación toman su importancia ya que al realizar dos funciones ai mismo tiempo (elevar e invertir), puede eliminarse la etapa de elevación mejorándose entre otras cosas la eficiencia. Esta mejora es dependiente de la energía reciclada como se verá en esta sección.
La eficiencia de los inversores con capacidad de elevación se ve disminuida debida a la energía reciclada, por lo que en esta sección se hace un análisis teórico de cómo afecta la energía reciclada en la eficiencia.
Redibujando el diagrama de flujo de la Fig. 2.14, se obtiene el de la Fig. 2.15. En este se considera la energía reciclada como un porcentaje de la potencia de entrada (k), la eficiencia de cada convertidor cdícd como q, y que el sistema está balanceado por lo que ambos procesan la misma energía.
Potencia Potencia de entrada de salida
Figura 2.15 Procesamiento de energía de los inversores con capacidad de elevación.
Basándose en la Fig 2.15 se obtiene la eficiencia de cada convertidor:
1 2 1 2
kP, + -Po 17, =
kPi, + -Pi, (2.43)
Despejado la razón de la potencia de salida entre la potencia de entrada se obtiene la eficiencia del inversor 17 :
77 = 2 P = 77, - 2k(l-77,) Pin
(2.44)
De (2.44) se puede ver que la eficiencia del inversor se ve reducida por el porcentaje de energía reciclada. En la Fig. 2.16 se grafica la ecuación (2.44) asumiendo que la eficiencia de los convertidores cd/cd es del 92%. Así mismo se grafica la
46
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
inversor reductor inversor elevador 95
-. - -- inversor reductor-elevador 9D
85 -
80 -
eficiencia que tendrían dos etapas en cascada, es decir si se utilizara un inversor reductor y un convertidor que eleve la tensión, para ello se asume que la eficiencia del inversor reductor es del 95% y la de la etapa de elevación del 92%.
#_.’ -.-. -._._.___.- */’
f
/ ’ ..<C
i., -c inversor con capacidad de
09 elevación -- Solución de dos etapas ’! 0.87
0.84
0,81
.- 5 u
0.78 I O 0,2 0,4 0,6 0,8 1
Factor de procesamiento k
Figura 2.16 Efecto del porcentaje de energía reciclada (k) en la eficiencia.
De la figura se puede ver que la eficiencia del inversor elevador puede ser mejor o peor que una solución de dos etapas dependiendo del porcentaje de energía reciclada, y esto depende de la capacidad de elevación deseada del inversor.
En la Fig. 2.17 se muestra la eficiencia medida en los prototipos experimentales diseñados, para una potencia de 300W. Se grafica la eficiencia del inversor reductor, inversor elevador y el inversor reductor elevador.
50 100 150 200 250 300
Potencia de salida (Vi)
Figura 2.17 Eficiencia de los distintos inversores en función de la potencia de salida.
47
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
La diferencia en las eficiencias del inversor tradicional y los inversores con capacidad de elevación se debe a dos factores. En primer lugar se debe a que el inversor reductor fue alimentado con 250V porque no puede elevar tensión, y por lo tanto los esfuerzos en corriente en este son mucho menores. En segundo lugar, la energía reciclada en los inversores con capacidad de elevación hace que el esfuerzo en comente se vea incrementado y por io tanto la eficiencia se ve reducida como lo ilustra el análisis aquí mostrado.
Es importante comentar que pese a la diferencia de eficiencias entre el inversor reductor y el elevador, este último es una mejor opción, ya que incluye la capacidad de elevación por lo que no es necesario incluir otra etapa para elevar la tensión.
2.3.4 Eficiencia, energía reciclada y capacidad de elevación
La eficiencia y la energía reciclada tienen un dependencia como se vio en la sección anterior, pero esta última depende de la capacidad de elevación requerida. En esta sección se encuentra la relación entre estos conceptos para el inversor elevador.
La eficiencia de un convertidor depende de las pérdidas asociadas al proceso de conversión. Dichas pérdidas dependen de las resistencias parásitas de los elementos pasivos, las pérdidas de conducción y de conmutación de los semiconductores. Con el fin de simplificar el análisis se consideran las pérdidas de los elementos pasivos y las pérdidas de conmutación despreciables; lo cual es valido cuando los elementos parásitos son pequeños y la frecuencia de conmutación no es muy alta.
Para estudiar la eficiencia del inversor elevador, primero se estudiará la eficiencia de un convertidor cdcd elevador, después si se conectarán dos convertidores cdcd elevadores en paralelo que no tengan un lazo interno de energía, para finalmente analizar la configuración del inversor elevador.
La eficiencia de cualquier convertidor puede expresarse como:
donde p, son la perdidas del convertidor pi, potencia de entrada del convertidor
(2.45)
Un convertidor cdcd elevador tiene las siguientes pérdidas si se consideran sólo las de conducción:
48
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
donde vCE es la tensión de encendido del semiconductor vDF es la tensión del diodo en conducción
La potencia de entrada del convertidor cdícd elevador es:
(2.46)
(2.47)
donde I, es la componente de continua de la corriente del inductor
Sustituyendo (2.46) y (2.47) en (2.45) se obtiene:
(2.48)
donde ILcd
ILms FPdc = __ es el factor de potencia pero en directa
v,d + v,(I - d) v, = es un factor de tensión. Vi"
Para el caso de un convertidor cdícd elevador el factor de potencia en directa es aproximadamente uno, debido a que la corriente efectiva y la componente de continua son prácticamente la misma. Pero si el factor de potencia disminuye la eficiencia también se ve reducida.
Cuando el convertidor cdcd elevador se conecta en paralelo para proporcionar energía a una misma carga, la eficiencia es la misma que la de cada convertidor cdcd elevador, siempre y cuando el factor de potencia en directa sea unitario. Pero cuando el arreglo de convertidores elevadores se conecta para trabajar como inversor elevador la comente efectiva y la componente de continua son diferentes, por lo que ve afectada como se ve en (2.48).
Para entender un poco más el comportamiento del inversor elevador, se supondrá que el inversor elevador no tiene un lazo interno de energía, es decir que la comente del inductor en vez de ser la ecuación (2.39) es:
49
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
(2.49)
El factor de potencia de directa asociada a esta corriente es entonces:
(2.50)
Es decir que aún cuando el inversor elevador no tenga un lazo interno de corriente, la eficiencia se vera disminuida por el factor de potencia en directa. De hecho el factor de potencia es de cierta forma energía reciclada, pero con la tensión de entrada.
Con (2.48) y (2.50) se obtiene la eficiencia del inversor elevador sin el lazo interno de corriente, es decir que:
(2.51)
Si se considera el lazo interno de corriente del inversor elevador, se debe considerar (2.39) sin eliminar ningún termino, entonces el factor de potencia en directa es:
VqGm 'Led = 1 FPd, = ~ ILms V O P G m = /q (2.52)
Por lo que la eficiencia del inversor elevador considerando el lazo de comente
4R
es:
v =
Utilizando (2.44), (2.51) obtiene que:
(2.53)
(2.53) y despejando el factor de procesamiento k se
50
DESARROLLO DE INVERSORES CON CAPACIDAD DE ELEVACIÓN.
k = -( 1 FP;, - I ) FPdc
(2.54)
De (2.54) se puede ver que el factor de procesamiento k depende de la capacidad de elevación deseada del inversor elevador (G,,,). Nótese que la relación de factores de potencia es siempre mayor a la unidad.
El presente análisis no considera la tensión adicional en VdC que evita la saturación de convertidor, es decir una holgura de acuerdo a la definida en [5]. Considerando dicha tensión se define nuevamente la tensión v d c como:
(2.55)
donde
h es la holgura considerada en la tensión como en [ 5 ] .
Este cambio provoca que la relación de factores de potencia de (2.54) cambie un poco debido al cambio introducido en (2.55), esta relación finalmente se convierte en:
(2.56)
s i incrementa la tensión v d c por un incremento en la holgura h, la ecuación (2.56) también se incrementa, lo que provoca que el factor de procesamiento k de acuerdo con (2.54) se vea aumentado. Dicho de otra forma el aumento de Vdc provoca que se recicle más energía disminuyéndose la eficiencia de acuerdo con (2.44).
51
Capítulo 3
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En este capítulo se presentan las diferentes técnicas de control estudiadas e implementadas para el inversor elevador. Se analiza el control por modos deslizantes, y una variante de la ley de control que permite eliminar el uso de sensores de corriente. Se analiza la técnica de control basada en pasividad y una mezcla entre modos deslizantes y pasividad. Se analiza una técnica de control no lineal que elimina el uso de sensores de comente. Y por último se hace una comparación entre dichas estrategias.
52
ESTUDIO E IMPLEMENTACibN DE ESTRATEGWS DE CONTROL PARA EL INVERSOR ELEVADOR
3.1 Introducción
La carga típica de un SA1 son equipos electrónicos que tienen en su entrada, como convertidor cdcd, un puente rectificador y un capacitor conectado. Como se mencionó en el capítulo uno este tipo de carga ocasiona una deformación en la tensión de salida del SAI, provocando un incremento de la distorsión armónica total (THD por sus siglas en inglés) en dicha tensión muy superior al 5%.
Cuando los equipos electrónicos sensibles son alimentados con una tensión distorsionada no operan correctamente, por ello para resolver este problema se necesita un control que no permita que la tensión de salida se distorsione. En el capítulo uno se describieron distintas técnicas de control que intentan solucionar este problema, pero básicamente el convertidor analizado es el inversor tradicional o reductor. Han sido muy pocas las técnicas de control abordadas para el inversor elevador, una de ellas muy costosa y complicada de implementar [5 ] , y el control por modos deslizantes que es la más sencilla [5,6] .
El inversor elevador es un sistema más complicado de controlar que el inversor tradicional, lo que hace aún mayor la necesidad de utilizar técnicas de control que introduzcan ai sistema buenas características. La razón por la que el inversor elevador es más complicado de controlar se debe a que se trata de un sistema no lineal de fase no mínima, aunado a que se trata de un problema de seguimiento por tratarse de un inversor que produce una tensión senoidal de salida.
Como se mencionó en el capítulo uno, básicamente sólo existen dos técnicas de control estudiadas para el inversor elevador, y una de ellas es complicada y costosa de implementar. Por ello en este trabajo se estudian diferentes técnicas de control, sin perder de vista que deben introducir buenas características ai sistema retroalimentado, pero tomando en cuenta la fácil implementación y costo.
Por lo anterior este capítulo aborda tres técnicas de control y variantes de ellas. Se empieza por el control por modos deslizantes como una técnica que ofrece muy buenas características; seguido por una técnica de control basada en pasividad la cual permite que el sistema ya pasivisado sea “fácil” de controlar; finalmente se presenta una técnica de control no lineal que permite eliminar el uso de sensores de comente, retroalimentando únicamente tensión, reduciéndose el costo del controlador.
3.2 Modelo del inversor elevador
Para todo diseño de un controlador es necesario primero obtener el modelo del sistema a controlar, en este caso el inversor elevador. Para ello se utiliza un circuito simplificado del inversor elevador, se consideran los interruptores ideales, y la carga
53
ESTUDIO E IMPLEMENTACIbN DE ESTRATEGIAS DE CONTROL PARA EL RYVERSOR ELEVADOR
como una fuente de corriente. En dicho modelo la ley de control u toma los valores de O y I. En la Fig. 3.1 se muestra el circuito simplificado utilizado.
+ v, -
A
Carga (Io)
u , = o
Figura 3.1 Circuito simplificado del inversor elevador
La posición de los interruptores está determinada por los valores 1 y O, se suponen del mismo valor las inductancias (L) y también las capacitancias (C). Las ecuaciones del sistema asociadas a cada posición del interruptor son:
Para ui=l y u2=l:
donde
Para ui=l y u2=0:
LZ, = y n c z, = -I, Li, =v, cz, = I ,
2, =Ir , , z2 =E,, z3 =IL,, 2, = vc, E,, es la comente del inductor i,,
Vc, es la tension del capacitor C,
LZ, = y n c 2, =-I,
Li, =q” -z4 C Z , = I , + z ,
(3.2)
54
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL [NVERSOR ELEVADOR
Para ul=O y u ~ = l : L i l =v, - 2 2
c iz = - I , i- 21
L i 3 =v, C i 4 =I,,
Para u,=O y u2=0: L i l = C n - Z Z c i, = -I , + 2,
L i 3 =v, -z, c i, = I , + z3
El sistema en forma matricial resultante es:
(3.3)
(3.4)
En (3.5) se puede observar que la ley de control uI solo afecta a las variables de estado z, y z2, también se puede observar que la ley de control uz solo afecta a las variables de estado z3 y z4, además las variables de estado z1 y zz no dependen de z3 y zq, y io mismo ocurre con z3 y a; por lo que se trata de un sistema desacoplado. Este desacoplamiento permite hacer una análisis independiente por cada rama del inversor.
Las ecuaciones del sistema para la rama de u, en su forma simplificada, debido a que el sistema está desacoplado, es:
(3.6)
3.3 Control por modos deslizantes
El control por modos deslizantes permite que el sistema retroalimentado presente características tales como robustez, buena respuesta dinámica, estabilidad ante variaciones grandes de la carga y de la fuente, entre otras. Una de sus desventajas es la relativa complejidad de la teona involucrada.
El control por modos deslizantes, a partir de la definición de una superficie denominada de deslizamiento "atrae" al sistema hacia ella y hace que el sistema permanezca ahí, llevándolo al punto de operación deseado una vez que se llega a la
55
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL W E R S O R ELEVADOR
superficie definida. El funcionamiento de la teoría se explica extensamente en diferentes referencias [3 1,45,46].
La idea consiste en combinar estructuras diferentes, como las mostradas en los planos de fase de las Figs. 3.1 y 3.2, obteniéndose un buen desempeño con dicha combinación.
Figura 3. I Plano de fase para a Figura 3.2 Plano de fase para -a
El plano de fase asociado ai movimiento con el control por modos deslizantes propuesto puede ser como el mostrado en la Fig. 3.3. En cualquier punto de operación en el que se encuentre el sistema, el control tomará un valor tal que obligue al sistema a llegar y a permanecer en la superficie de deslizamiento (s = O), una vez ahí el sistema es llevado al punto de equilibrio, en este caso cero.
Figura 3.3 Piano de fase con el control SM
Con base en el funcionamiento del control por modos deslizantes, los pasos de diseño pueden ser enlistados:
Obtener el modelo del sistema. Proponer una superficie de deslizamiento.
56
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL MVERSOR ELEVADOR
Verificar la existencia del modo de deslizamiento. Verificar la estabilidad dentro de la superficie.
El primer paso ya fue desarrollado en la sección anterior, por lo que sólo se discuten los otros pasos en los siguientes apartados. En esta sección se presentan dos controladores por modos deslizantes, el primer controlador utiliza sensores de corriente y el segundo evita el uso de estos.
3.3.1 Con sensores de corriente
La superficie de deslizamiento que tradicionalmente se propone es una combinación lineal de las variables de estado y las referencias:
ct = sle, + e2 =SE, = O donde
S = [ S, 1 1; s, =constante de diseño, E , = [ e , e21 T = i q - z l , ~ 2 - ~ 2 , 1 T .
(3.7)
La ecuación (3.7) es sencilla de implementar, pero no así la referencia de comente. La forma de la comente del inductor tiene una forma extraña y dependiente de la carga, como se vio en el capítulo anterior; por lo que hacer una referencia de corriente resulta complicado ya que ésta debe adaptarse al tipo de carga en forma y magnitud.
Por lo anterior la superficie de deslizamiento es modificada, dicho cambio permite que no se genere una referencia de comente
3.3.1.1 Superficie de deslizamiento
La superficie de deslizamiento propuesta es:
0 =s,J¿e,+Jce, = o donde
e, = i, - kie, e, = z2 - zZr
(3.8)
El término que contenía al error de corriente, se sustituye por la solución de la ecuación diferencial asociada a (3.8). La ley de control depende de la función <r de la superficie deslizante, esto es:
1-SgnO u, =
2 (3.9)
57
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En la teona del control por modos deslizantes, Utkin [45], se define una herramienta conocida como control equivalente (ueq ), esta herramienta es utilizada para conocer el comportamiento del sistema una vez que llega y permanece dentro de la superficie. El control equivalente es un “promedio” entre los valores de la ley de control real (sólo 1 y O), dicho control no se implementa físicamente, es un “artificio” matemático que nos ayuda en el análisis.
El control equivalente es válido cuando se está en la superficie deslizante, esto implica que o = O y por lo tanto ir = O . El control equivalente se obtiene de (r = O [31,45,46]. Derivando (3.8) y sustituyendo la ecuación diferencial asociada a la superficie (3.8) se obtiene :
(3.10)
Sustituyéndole el modelo del sistema, ecuación (3.6), a la ecuación (3.10) se obtiene:
Igualando a cero (3.1 I) y cambiando el control por el control equivalente se obtiene que:
(3.12)
3.3.1.2 Existencia del modo deslizante
Existen diversos métodos para comprobar la existencia del modo de deslizamiento [31,46], una de estas alternativas es satisfacer la condición:
Oci<O, (3.13)
Para cumplir esta condición, sabiendo que la ley de control es (3.9), se obtiene
(3.14)
que: Si uI = l + o < O - t u > O si UI = 0 + 0 > 0 - 1 & < 0
58
ESTUDIO E MPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Por lo tanto utilizando &, obtenida en (3.1 I), la condición (3.14) finalmente se convierte en:
- (3.15)
donde S 1 r='V --I, -sikiJ¿e,-&z2r J¿ in Jc
Las dos desigualdades anteriores deben cumplirse para cumplir la existencia del modo deslizante. Multiplicando ambas desigualdad por m, éstas se convierten en:
Como el término es muy pequeño, permite que las desigualdades puedan aproximarse a:
SI &Vi" -AI, > o s, J C C Z , -vi") - J¿cz, - I , ) > o
O bien
(3.17)
Para que exista el modo deslizante sI debe ser positiva dado que Vi, es positiva y zz >Vi,. Basta cumplir con estas condición para asegurar la existencia, pero no debe perderse de vista que (3.17) es una simplificación de (3.15).
3.3.1.3 Estabilidad dentro de la suDerficie de deslizamiento
Para comprobar la estabilidad del sistema dentro de la superficie de deslizamiento se utiliza el control equivalente (ueq) que se obtuvo en el apartado anterior:
- V, - -I, - s lk , f iex - f i z 2 r SI 1
Uleq = 1 - & E 1 (3.18) $z* -JCz1
Es importante notar que si la condición de existencia se cumple, el control equivalente no tiene singularidades. El control equivalente es un "promedio" entre los
59
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
dos posibles valores del control real (1 y O) por io que siempre el control equivalente estará entre 1 y O, pero nunca tomará íos valores 1 y O.
1 > ueq > o (3.19)
Para determinar la estabilidad dentro de la superficie se debe sustituir el control equivalente en el modelo del sistema, y hacer el análisis de estabilidad bajo esta condición. Desarrollando el sistema (3.6) se tiene:
Li, = -z,(l - u 1 ) + v,, { ci, = q(1 -u,)- I, (3.20)
1 Pre-multiplicando el primer renglón de (3.20) por L, el segundo por - y JL Jc sumando ambos renglones se obtiene:
(3.21)
Sustituyendo en el sistema (3.21) el control equivalente (3.18), y sustituyendo la superficie deslizante (3.8) se obtiene:
fii, + s, f i z , = - k i f i e 2 i fiz,, (3.22)
Reacomodando (3.22) se obtiene la ecuación diferencial del error de tensión que determina el comportamiento dentro de la superficie:
fie2 = -ki &?e, - sI Ail (3.23)
Modificando (3.23) a la forma:
Sustituyendo el segundo renglón del sistema (3.20) en (3.24), se obtiene:
(3.25)
Por otro lado sustituyendo en (3.12) la superficie (3.8) y despejando f i z z , se obtiene:
60
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Sustituyendo (3.26) en (3.25), se obtiene:
Reacomodando:
SI 1 1 -V, - -I, - ki&zir - f i Z i r J z J c +-I, i k i E z 2 , + JC¿2r Jc
(3.26)
(3.27)
(3.28)
La estabilidad del sistema se verifica en (3.28), si dicha ecuación es estable el sistema lo es. Por otro lado el segundo término de dicha ecuación actúa como la función forzante de la ecuación diferencial, si dicha función está acotada no es determinante en la estabilidad de la ecuación diferencial. Para demostrar la estabilidad del sistema se recurre a una función de Lyapunov, pero es importante notar que hay sistemas invariantes en el tiempo que son globalmente estables y no existe una función de Lyapunov que demuestre su estabilidad [47]. Por lo anterior y por simplicidad se verifica la estabilidad de la ecuación (3.28) sin la función forzante, para esto se propone la siguiente función de Lyapunov:
2
V ( Z , ) = SI J z i (3.29) 2
Por lo tanto su derivada es:
V ( Z , 1 = SI J¿Z,¿, (3.30)
61
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGiAS DE CONTROL PARA EL INVERSOR ELEVADOR
Sustituyendole (3.28), sin la función forzante, se obtiene:
2 Z I (3.31)
Para comprobar la estabilidad (3.31) debe ser negativo, esto es:
(3.32)
Es importante notar que Z: es siempre positivo y por lo tanto no afecta en la desigualdad si se suprime. Para cumplir dicha desigualdad primero aseguramos que el primer término de la condición (3.32) sea negativo, para ello se debe cumplir que:
(3.33)
Para hacer dicho término negativo se puede hacer que el numerador sea positivo y el denominador negativo o viceversa, verificando la primera opción y aproximando resulta que:
k: > O
k, <O.2- 4%
(3.34)
La otra forma de hacer que (3.33) sea negativo tiene el conjunto vació como solución, por lo que no se utiliza. El segundo término de (3.32) es siempre negativo. Por lo que la condición para que el sistema sea estable es:
SI O < k; < 0.2- J¿c
(3.35)
Es importante notar que (3.35) es un simplificación.
62
ESTUDIO E IMPLEMENTACION DE ESTRATEGMS DE CONTROL PARA EL INVERSOR ELEVADOR
3.3.1.4 Obtención de los parámetros del controlador.
En la sección anterior se obtuvo que para cumplir la existencia debe cumplirse la siguiente desigualdad
(3.36)
La tensión en el capacitor, representada por z2, siempre es positiva y mayor que Vi,, ya que es la tensión de salida de un convertidor cdcd elevador; la tensión de entrada siempre es positiva. Por ello, como primera condición para que haya existencia del modo deslizante s1 debe ser positiva.
La corriente del inductor y la corriente de salida, representada por ZI e L, pueden ser tanto positiva como negativa (capítulo 2). Por ello para asegurar la condición de existencia se puede hacer S I »O; esto no es una condición obligada, ya que la condición de existencia (3.36) no sólo depende de SI sino también de otras variables, pero sí nos indica qué se debe hacer en caso de no cumplir la condición de existencia.
Para determinar el valor frontera de s, se debe sustituir los valores de la variables en cuestión en (3.36). En estado estacionario los valores de la corriente en el inductor y la tensión en el capacitor fueron determinados en el capítulo anterior. El valor máximo de las desigualdades ocurre en wr = 4 2 , el cual concuerda con los valores máximos de dichas variables, y de acuerdo al capítulo anterior son:
Por lo que la condición de existencia se reduce a:
(3.37)
(3.38)
(3.39)
(3.40)
Donde R es la resistencia de carga.
63
ESTUDIO E IMPLEMENTACIdN DE ESTRATEGUS DE CONTROL PARA EL NVERSOR ELEVADOR
Es importante notar que las dos condiciones resultan ser la misma. En el diseño del inversor elevador, realizado en el capítulo anterior, se obtuvo G,= 3.54, L = 360pH, C = 221F, para una carga R = 48Q. Entonces resulta que:
s,) 0.2983 (3.41)
El valor de S I , en la práctica, debe ser un poco mayor que el indicado por (3.41), debida a la simplificación que hizo en la condición de existencia y además para que el sistema tenga una tolerancia debida a los elementos parásitos, ya que estos no se contemplaron en el análisis. Por ello se sugiere c1=0.5.
Para determinar ki del controlador se utiliza (3.35), que se obtuvo en la sección
(3.42) anterior, por io que:
1 < k, c 1123
Se sugiere un valor de ki de 1100. Es importante notar que las condiciones (3.41) y (3.42) son finalmente aproximaciones.
3.3.1.5 Asuectos de implementación
El controlador por modos deslizantes se puede construir una vez definidos sus parámetros. En la figura 3.5 se muestra el diagrama de bloques para la implementación física.
En el caso del inversor elevador, que está constituido por dos convertidores cdcd elevadores, se utilizan dos controladores, uno para cada convertidor cdcd. En la figura 3.5 sólo se ilustra uno de los controladores, por ser iguales; como se observa en la figura se mide la comente del inductor ( IL1 ), se pasa por un bloque para encontrar e, de la superficie deslizante (3.13), este término se multiplica con el parámetro sl; la tensión del capacitor se compara con su referencia. Las dos señales anteriores se suman para generar la función de deslizamiento o según (3.9). Posteriormente la suma debe pasar por un bloque limitador de frecuencia, ya que los interruptores no tienen una frecuencia de conmutación infinita como lo supone el análisis del controlador.
Para limitar la frecuencia de conmutación pueden utilizarse diferentes técnicas [5,48,49]. Una técnica sencilla es mantener el tiempo de encendido constante [SI, cuando la función de deslizamiento ocruza por cero (de más a menos), la ley de control cambia a uno positivo y se mantiene en ese estado un tiempo constante, la duración del tiempo de apagado se determina cuando la función vuelve a cruzar el límite correspondiente en el mismo sentido (Fig. 3.6).
64
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
UCr
Ui
Limitador de
Figura 3.5 Implementación del SMC.
Figura 3.6 Señal de control manteniendo el tiempo de encendido constante.
3.3.1.6 Resultados de simulación Y exuerimentales
El inversor elevador y el controlador por modos deslizantes descrito en esta sección fueron implementados con los valores de diseño obtenidos. En las Fig. 3.7 y 3.8 se muestran algunos resultados de simulación.
Las pruebas realizadas en simulación ilustran el comportamiento del sistema cuando el convertidor opera de forma normal, es decir cumpliéndose las condiciones de existencia y estabilidad. Pero también se muestran algunos resultados donde se ilustra cuando se pierde la existencia y cuando el sistema se vuelve inestable por seleccionar de manera equivocada los parámetros del controlador.
En la Fig. 3.7 se muestra el comportamiento del sistema ante una carga lineal operando correctamente, se utilizan los parámetros encontrados en una sección anterior (los valores usados son sl= 0.5 y ki=llOO).
65
ESTUDIO E IMPLEMENTACI6N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En la Fig. 3.8 se muestran los resultados cuando el sistema deja de operar correctamente debido a una mala selección de los parámetros del controlador; en la Fig. 3.8.a se muestra el caso cuando se pierde la existencia, pero se sigue cumpliendo la condición de estabilidad (los valores usados son sl= 0.28 y k,=550); en la Fig. 3.8.b se muestra el caso cuando se cumple la condición de existencia, pero la condición de estabilidad ya no se cumple (los valores usados son S I = 0.5 y ki=15500).
Figura 3.7 Formas de onda ante una carga lineal. De arriba para abajo: Tensiones de rama y tensión de entrada; tensión de salida y corriente de salida; ley de control de una rama.
Tiempo (I)
o m 4m OD1 0 o4 OM
Figura 3.8 Formas de onda cuando se hace una mala selección de los parámetros del controlador: tensiones de rama y tensión de entrada; tensión de salida y comente de salida; ley de control de una rama. a) cuando se pierde la existencia, b) cuando se pierde la estabilidad.
66
ESTUDJO E IMPLEMENTACJON DE ESTRATEGL4S DE CONTROL PARA EL INVERSOR ELEVADOR
En las Fig. 3.9 a 3.11 se muestran algunos resultados experimentales de la técnica de control. Las pruebas consisten en medición de THD sin carga y con carga resistiva al 100% de la potencia; cambio de carga del 20% al 80% y viceversa; carga no lineal con potencia aparente al 66% de la potencia nominal, midiendo THD; finalmente un cambio en la tensión de entrada de 50V a 45V, para una carga resistiva a una potencia del 50%.
Figura 3.9 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida.
En la Fig. 3.9 se muestran los resultados del prototipo ante un cambio de carga, los tiempos de establecimiento son de 480p.s y 8OOps, cuando la carga aumenta y disminuye respectivamente. El máximo sobre impulso es de 18V.
En la Fig. 3.10 se muestran los resultados del prototipo ante una carga no lineal de 200VA, la carga no lineal se calculó de acuerdo al apéndice E de la norma IEC- 62040-3. La distorsión armónica total fue de 4.2%
Figura 3.10 Inversor elevador operando ante una carga no lineal. De arriba para abajo: Tensiones de rama, tensión y corriente de salida.
67
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En la Fig. 3.11 se muestran los resultados del prototipo ante un cambio en la tensión de entrada de 50V a 45V, manteniendo una potencia de salida ai 50% de la potencia nominal. No se aprecia deformación alguna en la tensión de salida. La distorsión armónica sin carga y con carga resistiva fue de 2.6% y 3.5% respectivamente.
. .
12 F e 2Ml .iQ2ioilt,
Figura 3.11 Inversor elevador operando ante un cambio en la tensión de entrada. De arriba para abajo. Tensión de rama, tensión de entrada, tensión y corriente de salida.
3.3.2 Sin sensores de corriente
La implementación de la técnica de control por modos deslizantes descrita en la sección anterior utiliza el sensado de la corriente del inductor, esto se debe a que la superficie de deslizamiento definida la utiliza. Esto implica un incremento en el costo del controlador debido al sensor de corriente, puesto que éste debe permitir el sensado de comente con componente continua, es decir el sensor que debe utilizarse es especial: de efecto Hall.
Uno de íos objetivos de la tesis es buscar estrategias de control que permitan una buena respuesta dinámica en el sistema, pero si es posible disminuir el costo de éste, esta técnica se vuelve aún más atractiva. Si se elimina el uso de sensores de comente la implementación de la técnica de control se vuelve económica, por lo que se vuelve más atractiva la estrategia de control que lo permita. Esta sección tiene como finalidad estudiar la técnica de control por modos deslizantes, pero eliminando el uso del sensor de corriente.
En [50] se propuso una forma de eliminar el uso de sensores de corriente utilizando el control por modos deslizantes y recientemente en [32] se propuso una variante de ello. La forma de eliminar el sensor de comente es tomado de esos artículos, pero utilizando la superficie de deslizamiento propuesta en la sección anterior.
68
ESTUDIO E EXPLEMENTACION DE ESTRATEGiAS DE CONTROL PARA EL INVERSOR ELEVADOR
3.3.2.1 Superficie de deslizamiento
La superficie de deslizamiento propuesta en esta sección es similar a (3.9), pero se cambia la ecuación diferencial asociada a la superficie, esto es:
(3.43) donde:
Como se puede observar en (3.43) la nueva superficie no utiliza la corriente del inductor, por lo que no es necesario sensarla. A cambio se utilizan la ley de control y la tensión de entrada. Si se toma el primer renglón del modelo del sistema (3.20) que es el sistema a controlar, se tiene que:
Li, =-z2(l-u1)+Vm (3.44)
De (3.44) se observa que el término que evita el uso de la corriente del inductor se tomó de esta ecuación, es decir se basa en el modelo del sistema a controlar. Pese al cambio en la superficie de deslizamiento, la condición de existencia así como el análisis de estabilidad no cambian, puesto que el cambio está basado en el sistema a controlar.
3.3.2.2 Aspectos de imuiementación
La parte diferente de la superficie de control, podría pensarse que es complicada de implementar, debido a la multiplicación de la tensión de salida con la ley de control. Pero como la ley de control toma solo dos valores posibles, entonces finalmente se trata de que aparezca o desaparezca un término, es decir opera como una compuerta lógica. Para implementar esta compuerta lógica se usa la técnica DTL, la cual es sencilla de implementar; en la Fig. 3.12 se muestra la implementación.
Figura 3.12 Implementación de la compuerta lógica.
69
ESTUDIO E LVPLEMENTACI6N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
3.3.2.3 Resultados de simulación y exoerimentales
El controlador por modos deslizantes descrito en esta sección fue implementado. En las Fig. 3.13 y 3.14 se muestran algunos resultados de simulación. En la Fig. 3.13 se muestran los resultados ante un cambio de carga y en la Fig. 3.14 se muestran los resultados ante una carga no lineal.
rn Cmrimtemunindurtm(A)
. I bJ+A\#< 0 :
fw (1) .!O' o 0.m OM 0.05 OD, 0.02
Figura 3.13 Inversor elevador ante una cambio de carga. De arriba para abajo: tensiones de rama, tensión y corriente de salida, corriente en un inductor.
Figura 3.14 Inversor elevador ante una carga no heal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida, corriente en un inductor.
70
ESTUDIO E IMPLEMENTACION DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En las Fig. 3.15 a 3.17 se muestran algunos resultados experimentales de la técnica de control.
En la Fig. 3.15 se muestran los resultados del prototipo ante un cambio de carga, los tiempos de establecimiento son de Ims y lms, cuando la carga aumenta y disminuye respectivamente. El máximo sobre impulso es de 26V.
Figura 3.15 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida.
Figura 3.16 Inversor elevador ante una carga no heal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
En la Fig. 3.16 se muestran los resultados del prototipo ante una carga no lineal de 200VA, la carga no lineal se calculó de acuerdo al apéndice E de la norma IEC- 62040-3. La distorsión armónica total fue de 6%. En la Fig. 3.17 se muestran los resultados del prototipo ante un cambio en la tensión de entrada de 50V a 45V, manteniendo una potencia de salida ai 50% de la potencia nominal. No se aprecia
71
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
deformación alguna en la tensión de salida. La distorsión armónica sin carga y con carga resistiva fue de 2.0% y 4.9% respectivamente.
n
Figura 3.17 Inversor elevador ante un cambio en la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de salida
3.4 Control basado en pasividad
El control por pasividad se basa en la propiedad fundamental de disipación de energía de los sistemas fisicos. Si un sistema es pasivo es relativamente “fácil” de controlar [28]. En electricidad los elementos resistivos son los que disipan la energía y determinan la pasividad de un sistema.
Para entender pasividad, primero es necesario definir algunos términos y sus relaciones, estos términos son energía suministrada, energía almacenada y energía disipada. La energía almacenada debe ser igual a la energía suministrada menos la energía disipada:
H( t ) -H(0 ) = I’v(t)*i(t)dt-IIR*i’(t)dt O O (3.45) donde: H(t) = energía disponible
H(0) = energía inicial
En electricidad los elementos que almacenan energía son los inductores y capacitores, la energía almacenada en ellos está determinada respectivamente por:
1 .2 v =- L z ( t ) 2 1 2
z = -c v’(t)
(3.46)
(3.47)
donde: v = Energía cinética = Energía potencial
72
ESTUDIO E IMPLEMENTACION DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Para poder conocer de las propiedades de un sistema pasivo es necesario primero definir lo siguiente:
Se dice que es disipativa con respecto a la fuente w(u, y ) : R"xR"+ R si y solo si existe una función de almacenamiento H : R" + R,, - , tal que:
Para todo u, toda T2O y toda x0 E R"
Se dice que es pasiva si es disipativa con la fuente w(u,y) = u'y . Es pasiva estrictamente de la entrada (ISP, por sus siglas en inglés) si es disipativa con la fuente o (u , y ) = u'y - 6,llulf, donde 6, > O . Es pasiva estrictamente de la salida (OSP, por sus siglas en inglés) si es disipativa con la fuente w(u,y) = u'y - 6,lIylf, donde 6, > O .
Una de las propiedades importantes es que si c: u H yes OSP entonces es estable [39], también la interconexión de sistemas pasivos resulta en un sistema pasivo (invarianza de la pasividad) e incluso para sistemas OSP resulta en un sistema OSP.
El conocer estas propiedades permite saber que si se usa la pasividad para diseñar un controlador, el sistema controlado resulta en un sistema estable.
Para entender el procedimiento de diseño se utilizará un ejemplo dado en 1281. Primero se debe obtener el modelo del sistema a controlar, en este caso es el convertidor cdcd elevador:
D, i+(l-/ . t)J, Z + R, z = E, (3.49)
donde: D B = [ o L O c]. J B = [ o '1. - 1 o
Se utilizará una función de energía: -7 H =-z DgZ
2
donde: es vector de error.
(3.50)
73
ESTUDIO E IMPLEMENTACI6N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
El sistema retroalimentado debe comportarse como un sistema pasivo en la dinámica del error. Para ello se establece una dinámica del error pasiva (estable) asociada a la función de energía utilizada [28]:
D, $+(I - p ) ~ , z + R,, z = O (3.51)
[: i;R] donde: R,, = R, + Rld =
R, > O
D, = ( i - p ) * ( J , + J , T )
1 -T Si el sistema (3.51) se multiplica por - z y se integra, se pueden identificar
claramente las partes de almacenamiento de energía y disipación. Si se observa el sistema de la dinámica de los errores es muy parecido al sistema (3.49), sólo que se le agregó un término de amortiguamiento RI (término de disipación).
2
Con (3.49) y (3.51) se puede obtener la dinámica que deben tener las
(3.52) referencias:
DE i d +(l -P)Js Zd +RE Zd -RIB F = & E
O bien sustituyendo las matrices queda:
LZl, + (1 - P ) z ~ , - (21 - ~ 1 d ) R i = E 1 R
C¿,, - (1 - p)zid + -Z2, = O (3.53)
Si el sistema se quisiera regular directamente a través de la tensión de salida el sistema resultante no es estable, ya que es de fase no minima o bien la dinámica de los ceros es inestable, por io que la regulación de la tensión de salida se debe hacer de manera indirecta a través de la comente. Por ello se asume que la referencia z,,es la utilizada.
Despejando z*, de (3.53) y sabiendo que zld es constante se obtiene:
(3.54)
Sustituyendo (3.54) en (3.53) y después de algunas manipulaciones se obtiene:
74
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGWS DE CONTROL PARA EL INVERSOR ELEVADOR
Esta ecuación diferencial es estable, y por lo tanto es una ley de control factible para el sistema.
La ecuación (3.55) es la que determina la ley de control que se le debe aplicar al sistema a controlar. Resolver la ecuación no es trivial, por lo que se recomienda implementar la ecuación diferencial y que se resuelva en línea. Por esto, dependiendo del sistema, posiblemente para su implementación se requiera de un microcontrolador o un procesador digital de señales que permita la implementación relativamente sencilla del controlador.
También es posible obtener la ley de control sin integrales si se conocen ambas referencias [51]; sólo que en este caso la única variable de estado permisible a realimentar es la corriente, ya que si se realimenta la tensión el sistema resultante es de fase no mínima.
3.4.1 Controlador basado en pasividad
Con base en la sección anterior, los pasos de diseño de la técnica de pasividad pueden ser enlistados como:
Obtener el modelo del sistema. Proponer una dinámica del error para una cierta función de energía donde se incluyan los elementos de amortiguamiento (pasivo). Encontrar ley de control o la ecuación diferencial. Para ello se debe tomar en cuenta si el sistema es de fase no mínima con respecto a la variable a controlar. Verificar la estabilidad del sistema.
El modelo del convertidor ya se obtuvo previamente, el cual es:
[" o c O]I['']+[ z2 -1 O o '][zll(l-u,,=[-';.] z2
DBi +J,Z(l -u1) = E
3.4.1.1 Dinámica del error uropuesta
(3.56)
(3.57)
El segundo paso es proponer una dinámica del error pasiva y por lo tanto estable, sólo se propone para una rama, esta dinámica fue propuesta en [28]:
75
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL NVERSOR ELEVADOR
DE Z + ( i - u , ) J , Z + R E d ;=O (3.58)
donde R , = ["I o ] 0 R2
R, > O , R , > O D, = ( l - u , ) * ( J , +J ; )
3.4.1.2 La lev de control
El tercer paso es encontrar la ley de control de (3.58) y (3.57), para ello se asume que se conocen ambas referencias y que se controlará la salida de manera indirecta. Resolviendo, la dinámica de las referencias resulta:
De (3.59) la ley de control resultante es:
(3.59)
(3.60)
El sistema se controla de manera indirecta a través de la corriente porque el sistema es de fase no mínima si se regula con la tensión de salida.
3.4. I .3 Primeros resultados de simulación y experimentales
La ley de control (3.60) presenta el inconveniente de utilizar una referencia de comente, para evitar dicha generación se utilizará el esquema del controlador por modos deslizantes. Además para simplificar un poco más aún la implementación el término que contiene al inductor se desprecia ya que éste es de valor muy pequeño.
Las simulaciones del inversor se hicieron contemplando las modificaciones a la ley de control, las cuales se muestran en las figuras 3.18 y 3.19. En las simulaciones al parecer se obtiene un buen desempeño con el controlador, pero no así en los resultados experimentales, como se verá más adelante.
76
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL iNVERSOR ELEVADOR
Figura 3.18 Formas de onda ante una carga resistiva. De arriba abajo: Tensiones de rama y tensión de entrada; tensión y comente de salida; ley de control de una rama.
Figura 3.19 Formas de onda ante un cambio de carga. De arriba abajo: Tensiones de rama y tensión de entrada; tensión y corriente de salida; ley de control de una rama
El controlador se implement6 y los resultados experimentales se muestran en la Fig 3.20. Como se puede apreciar el sistema no se comporta como se esperaba, se presenta una deformación en las crestas de la tensión.
Esto puede deberse a dos razones; que el modelo inversor de donde se obtiene el controlador no contempla los parásitos o bien que las simplificaciones realizadas al controlador no ofrezcan un buen desempeño.
17
ESTUDIO E IMPLEMENTACI6N DE ESTRATEGWS DE CONTROL PARA EL INVERSOR ELEVADOR
, . . . . . . . , , . , . . . . , . .
. . . ,
... ... . ,... ..., . , . . ~ . . ,. .,, .
Figura 3.20 Formas de onda ante una carga resistiva. De arriba abajo: Tensión de una rama y tensión de entrada
Con el propósito de verificar la primer razón posible se obtuvo un modelo del inversor elevador que contempla la resistencia parásita del inductor, el cual resulta ser:
(3.61)
donde:
Simulando el sistema (3.61), pero con la ley de control obtenida con la simplificación antes mencionada, se observa el comportamiento obtenido experimentalmente, como se muestra en la Fig. 3.21. Por lo que se concluye, desafortunadamente que los parásitos si tienen que ver con el desempeño del sistema, cuando se utiliza la ley de control simplificada.
rl es la resistencia parásita del inductor.
Con el propósito de verificar la segunda razón, es decir que la simplificación del controlador sea la que no permita el buen desempeño del sistema; para ello se simuló el sistema sin simplificar la ley de control, pero con el modelo que incluye los parásitos, es decir (3.61). El resultado se muestra en la Fig. 3.22, se puede ver que a pesar de utilizar el controlador sin simplificación alguna el sistema no se comporta como se desea, los elementos parásitos aún tienen influencia en el desempeño del sistema; en esta última simulación se incluyó un cambio de carga.
En consecuencia si desea obtener un controlador basado en pasividad para el inversor elevador, se deben contemplar los elementos parásitos del sistema, y por lo tanto el controlador también. Hacer esto es impráctico desde que los valores de los parásitos son distintos de un inversor a otro y de diversa naturaleza, por lo que no se
78
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL iNVERSOR ELEVADOR
-- . 2W:
Mi
mo: M-
sabría con certeza qué elementos parásitos deben utilizarse para lograr un buen desempeño del sistema.
O M om Figura 3.21 Simulación utilizando un modelo del inversor más completo, pero utilizando la ley
de control simplificada. De arriba abajo: Tensión de una rama y tensión de entrada.
19
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
3.4.1.4 Modificación a la lev de control
La ley de control obtenida en un apartado anterior es:
6 n + Ri (Zi - Z l d ) - L i l d
Z2d U] =1- (3.62)
Dicha ley de control con sus simplificaciones respectivas, no presenta buenos resultados como se describe en la sección anterior, por ello dicha ley de control es modificada. La nueva ley sugerida es:
F,, + kp (z2 - Z2d + kip (Z2 - Z 2 d ) d t +R$p U], = 1 - (3.63)
=2d
donde: e, = - kj2e,
Se utiliza un compensador PI del error de la tensión de salida. El término e, se utiliza para evitar la generación de la referencia de comente. Con esta ley de control se logra obtener buenos resultados en el prototipo experimental.
3.4.1.5 Estabilidad del sistema
La técnica de control basada en pasividad conduce de manera natural a un sistema estable; pero el controlador modificado hace que el sistema retroalimentado ya no sea estrictamente pasivo. Por lo anterior es necesario verificar la estabilidad del sistema; para ello se sustituye la ley de control (3.63) en el sistema a controlar (3.61), en este sistema resultante se verifica la estabilidad.
3.4.1.6 Aspectos de imDlementaciÓn
La implementación del control es relativamente sencilla, la Única parte relativamente complicada es la división, por esta razón es la que se comentará con más detalle. El circuito utilizado para implementar el compensador PI se muestra en la Fig. 3.23. Las sumas de términos se implementa de manera muy sencilla por lo que no se comenta acerca de ellas.
Figura 3.23 Circuito para implementar un compensador PI
80
ESTUDIO E IMPLEMENTACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
El divisor requerido por la ley de control se implementa con un multiplicador conectado a un amplificador como se muestra en la Fig. 3.24. Esta configuración permite implementar un divisor; el circuito final se encuentra en la hojas de datos del integrado MC1495. Dicho circuito utiliza muchos puntos de ajuste, es decir dependiente de resistencias de ajuste (trimpots), complicándose entonces su implementación en sene.
Figura 3.24 Circuito para implementar un divisor
Otra parte importante en la implementación es la generación de pulsos a partir de la ley de control continua. Para ello simplemente se compara la señal de control con una señal triangular de frecuencia constante, que determina la frecuencia de conmutación; dependiendo de si el resultado de la comparación es positivo o negativo se obtiene la ley de control real aplicada a los semiconductores (Fig. 3.25).
Ley de control
Figura 3.25 Generación de pulsos a partir de una ley de control continua
3.4.1.7 Resultados finales de simulación v exuerimentales
La ley de control modificada fue implementada y simulada. En las simulaciones se utilizó el modelo del sistema que contempla la resistencia parásita del inductor, es decir el sistema (3.61). En las Fig. 3.26 y 3.27 se muestran algunos resultados de simulación.
En la Fig. 3.26 se muestran los resultados ante un cambio de carga y en la Fig. 3.27 se muestran los resultados ante una carga no lineal.
81
.. - . .~. . .... .
ESTUDIO E IMPLEMEWACI~N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En las Fig. 3.28 a 3.30 se muestran algunos resultados experimentales de la técnica de control. En la Fig. 3.28 se muestran los resultados del prototipo ante un cambio de carga, los tiempos de establecimiento son de 880ps y 1.5ms, cuando la carga aumenta y disminuye respectivamente. El máximo sobre impulso es de 30V.
150-
m se i T * < m p O (5)
O 1 OW om ON om
o om am om ow Lev de control de UM rama
Figura 3.26 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida, ley de control de una rama.
Figura 3.27 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensi6n de salida y corriente de salida
82
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En la Fig. 3.29 se muestran los resultados del prototipo ante una carga no lineal de 200VA, la carga no lineal se calculó de acuerdo al apéndice E de la norma IEC- 62040-3. La distorsión armónica total fue de 6.3%. En la Fig. 3.30 se muestran los resultados del prototipo ante un cambio en la tensión de entrada de 50V a 45V, manteniendo una potencia de salida al 50% de la potencia nominal. No se aprecia deformación alguna en la tensión de salida
Figura 3.28 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión y corriente de salida
Figura 3.29 Inversor elevador ante una carga no lineal. De arriba para abajo: tensión de rama, tensión y corriente de salida
83
ESTUDIO E lMPLEMENTACI6N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Figura 3.30 Inversor elevador ante un cambio de la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de salida
La distorsión armónica sin carga y con carga resistiva fue de 3.6% y 3.9% respectivamente.
3.4.2 Pasividad con modos deslizantes
Una variante del control por modos deslizantes, es incorporarle conceptos de pasividad, lo cual sería muy atractivo ya que se aprovechan las características de ambas estrategias.
En la Fig. 3.31 se muestra la forma en que se incorporaría pasividad a la estrategia de control por modos deslizantes. Esta forma de mezclar estas técnicas de control se describe en [28], sólo que para hacer una simplificación en la implementación sólo se utiliza una dinámica y no dos en el lazo de retroalimentación.
La superficie deslizante para este esquema está basada en la superficie (3.9) propuesta en este capítulo, sólo que se cambia un término para incorporar la técnica de pasividad.
oSp = s, &exp + f i e 2 = O (3.64) donde:
exp = i,, - k,eXp
La diferencia esta en zip, que se obtiene de la dinámica de las referencias, ecuación (3.59), obtenidas en el desarrollo de pasividad. El primer renglón de la dinámica de la referencias, pero adaptado a esta configuración es:
84
ESTUDIO E MPLEMENTACI6N DE ESTRATEGM DE CONTROL PARA EL INVERSOR ELEVADOR
U 0
Rama del Inversor elevador
Dinámicade las referencias pasiva
Figura 3.3 1 . Diagrama de bloques de la implementación de pasividad en modos deslizantes
En (3.65) se utiliza nuevamente la referencia de corriente, por lo que se utilizará nuevamente la idea de la ecuación diferencial, esto es:
Simplificando las ecuaciones (3.64) y (3.66) se obtiene:
(3.67)
La ley de control utilizada es la misma que la utilizada en modos deslizantes:
1-sgno u1 =
2 (3.68)
La ley de control final del sistema u1 es la misma que la utilizada en la dinámica de las referencias (up), y esto se debe a que el modelo del sistema a controlar es el mismo en ambas técnicas de control, por lo que:
up =u , (3.69)
3.4.2.1 Aspectos de implernentación
Los aspectos de implementación de este controlador no se detallan, puesto que estos ya se discutieron en la sección correspondiente a la implementación del control por modos deslizantes.
85
ESTUDlO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Básicamente, se utiliza el concepto de la compuerta lógica DTL para implementar la multiplicación de la ley de control con Vz,.
3.4.2.2 Resultados de simulación Y exuerimentales
La ley de control de pasividad con modos deslizantes fue implementada y simulada. En las Fig. 3.32 y 3.33 se muestran algunos resultados de simulación. En la Fig. 3.32 se muestran los resultados ante un cambio de carga y en la Fig. 3.33 se muestran los resultados ante una carga no lineal.
Figura 3.32 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida.
OM am OM OD5
Figura 3.33 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida, corriente en el inductor.
86
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En las Fig. 3.34 a 3.36 se muestran algunos resultados experimentales de la técnica de control. En la Fig. 3.34 se muestran los resultados del prototipo ante un cambio de carga, los tiempos de establecimiento son-de 1.lms y Ims, cuando la carga aumenta y disminuye respectivamente. El máximo sobre impulso es de 36V (si es que se puede denotar como tal). Es importante notar el error en estado estacionario de la tensión de salida, con este controlador se esperaba una mejor respuesta que el control por modos deslizantes, pero al igual que en el controlador por pasividad sin compensación, este controlador es sensible a los elementos parásitos.
Figura 3.34 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión y comente de salida
En la Fig. 3.35 se muestran los resultados del prototipo ante una carga no lineal de 200VA, la carga no lineal se calculó de acuerdo al apéndice E de la norma iEC- 62040-3. La distorsión armónica total fue de 7.8%.
Figura 3.35 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión de salida y corriente de salida
87
ESTUDIO E IMPLEMENTACION DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
En la Fig. 3.36 se muestran los resultados del prototipo ante un cambio en la tensión de entrada de 50V a 45V, manteniendo una potencia de salida al 50% de la potencia nominal. No se aprecia deformación alguna en la tensión de salida. La distorsión armónica sin carga y con carga resistiva fue de 1.8% y 4.4% respectivamente.
Figura 3.36 Inversor elevador ante un cambio de la tensión de entrada. De arriba para abajo: tensión de rama, tensión de entrada, tensión y corriente de salida
3.5 Control no lineal con sólo retroalimentación de tensión
En [52] se propuso una ley de control no lineal que permite eliminar el uso de sensores de corriente, la ley de control se obtuvo del conocimiento del comportamiento del sistema, evaluando el modelo. Una forma distinta a la expuesta en [52] de deducir la ley de control, expuesta en esta sección, es partiendo de la función de ganancia de un convertidor cd/cd elevador, la cual es:
v o - 1 V, I- D
donde: D es el ciclo de trabajo
(3.70)
Haciedo que D sea la ley de control, y representando la tensión de salida por 22,
se obtiene que: I;" u, =1-- z2
(3.71)
Esta ley de control todavía no incluye algún lazo de retroalimentación, por lo que para cerrar el lazo de control se utiliza un cornpensador PD sumado a la tensión de entrada, resultando:
88
ESTUDIO E LMPLEMENTACION DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
3.5.1. Implementación de la ley de control
Esta ley de control evita el uso de sensores de comente y utiliza un divisor. La implementación del divisor ya se discutió en la sección de pasividad, por lo que no se aborda en esta sección. La parte derivativa del compensador PD se puede implementar utilizando un arreglo en un amplificador operacional en configuración de derivador, pero esto normalmente introduce problemas de ruido en alta frecuencia. Para evitar los problemas de ruido se utiliza una variación del compensador derivativo, cuya función de transferencia es:
(3.73)
La parte derivativa se implementa con el cero en el origen de la función de transferencia, pero se le agrega un polo a una frecuencia no muy alta, con el propósito de que las componentes de alta frecuencia no tengan una ganancia muy alta.
El circuito para implementar la parte derivativa se muestra en la Fig. 3.37. La frecuencia de corte está determinada por la resistencia y la capacitancia (u, = gc).
entrada
Figura 3.37 Compensador derivativo modificado.
La ley de control propuesta es una función continua por lo que debe utilizarse un generador PWM, el cual fue discutido en otra sección. Una parte importante en la implementación del inversor elevador, que no ha sido discutida en otras secciones de implementación, es la inserción del tiempo muerto. El tiempo muerto es el tiempo que deben durar en bajo las señales de encendido/apagado de los interruptores de una rama, para evitar que los interruptores de una dicha rama se cortocircuiten. Esto se implementó utilizando comparadores, la configuración se muestra en la Fig. 3.38.
89
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGíAS DE CONTROL PARA EL INVERSOR ELEVADOR
Figura 3.38 Circuito para insertar el tiempo muerto.
3.5.2. Resultados de simulación y experimentales
La ley de control (3.76) fue simulada e implementada. En las Fig. 3.39 y 3.40 se muestran las simulaciones del controlador. En la Fig. 3.39 se muestran los resultados ante un cambio de carga y en la Fig. 3.40 se muestran los resultados ante una carga no lineal.
En las Fig. 3.41 a 3.43 se muestran algunos resultados experimentales de la técnica de control.
En la Fig. 3.41 se muestran los resultados del prototipo ante un cambio de carga, los tiempos de establecimiento son de 8 8 0 p y 88Ops, cuando la carga aumenta y disminuye respectivamente. El máximo sobre impulso es de 32V.
Figura 3.39 Inversor elevador ante un cambio de carga. De arriba para abajo: tensiones de rama, tensión de salida y comente de salida, ley de control.
90
16
ESTUDIO E lMPLEMENTAC16N DE ESTRATEGIAS DE CONTROL PARA EL NVERSOR ELEVADOR
Figura 3.42 Inversor elevador ante una carga no lineal. De arriba para abajo: tensiones de rama, tensión y corriente de salida.
En la Fig. 3.43 se muestran los resultados del prototipo ante un cambio en la tensión de entrada de 50V a 45V, manteniendo una potencia de salida al 50% de la potencia nominal. No se aprecia deformación alguna en la tensión de salida. La distorsión armónica sin carga y con carga resistiva fue de 3.7% y 4.9% respectivamente.
Figura 3.43 Inversor elevador ante un cambio de la tensión de entrada. De arriba para abajo: tensiones de rama, tensión de entrada, tensión y corriente de salida.
3.5.3. Ley de control continua convertida a ley de control discontinua
La estrategia de control por modos deslizantes que utiliza una ley de control discontinua realmente es muy versátil, ya que no solamente puede definirse una superficie deslizante; ejemplo de ello son las ya propuestas en este capítulo. El control por modos deslizante está abierto a muchas superficies de deslizamiento, la cuestión es cómo proponerla. En esta sección se abordará cómo obtener la ley de control por
92
ESTUDIO E IMPLEMENTACIÓN DE ESTRATEGiAS DE CONTROL PARA EL INVERSOR ELEVADOR
modos deslizantes “análoga” a la ley de control continua obtenida en esta sección, pero el procedimiento puede ser extrapolado a cualquier otra.
Haciendo que la ley de control (3.72) sea el control equivalente del sistema controlado utilizando modos deslizantes, se tiene:
(3.74)
Manipulando (3.74) para que éste sea igual a cero se obtiene:
Como el control equivalente se obtiene de ir = O, (3.75) se hace igual a a . Por lo que integrando se puede obtener la superficie deslizante que se utilizará en el control por modos deslizantes, resultando:
Esta superficie de deslizamiento en combinación con la ley de control que se muestra a continuación, hacen la ley de control discontinua asociada a la ley de control continua (3.72).
1-sgno 2
u, = (3.77)
Esta nueva ley de control es más sencilla de implementar que (3.72), ya que se evita el uso del divisor, el cual además de no tener una sencilla implementación se hace con un integrado relativamente caro. La nueva ley de control (3.76) y (3.77) sólo utiliza amplificadores operacionales, la compuerta DTL (discutida en una sección antenor) y un comparador.
3.6 Discusión de las diferentes técnicas de control
Esta sección tiene como intención hacer una comparación entre la diferentes técnicas de control implementadas, vistas éstas como caja negra. Esto no establece que teoría de control ofrece el mejor controlador, ya que esto es subjetivo al método de diseño seleccionado y forma de implementación. La intención es establecer cual de los controladores implementados ofrece las mejores características.
93
ESTUDIO E IMPLEMENTACIdN DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
Se comparará que tipos de dispositivos se utilizan para su implementación, número de sensores de corriente, si la frecuencia de conmutación es variable o fija y otras características más. De las características introducidas al sistema en lazo cerrado se comparan el tiempo de establecimiento ante un cambio de carga, la distorsión armónica total ante carga resistiva y no lineal, y el máximo sobre impulso.
Las técnicas de control implementadas fueron cinco: el control por modos deslizantes (SMC), el control por modos deslizantes sin sensores de corriente (SMCSS), el control basado en pasividad pero modificado (MPBC), la mezcla de pasividad y modos deslizantes( PSMC), y la técnica de control no lineal que no utiliza sensores de corriente (NLC).
En la Tabla 3.1 se concentran los resultados obtenidos con cada controlador y se comparan sus características. Estas Últimas determinan la emisión de ruido, costos y desempeño de cada controlador.
La frecuencia de conmutación determina la emisión de ruido, por io que para ciertas aplicaciones es necesario que la frecuencia de conmutación sea fija; además es recomendable que la frecuencia de conmutación sea superior a 20kHz para evitar el ruido audible. El uso de sensores de corriente especiales como los de efecto Hall, hacen que el sistema incremente su costo considerablemente. El integrado utilizado para realizar una división es relativamente costoso y complicado de ajustar, por lo que sena deseable para el controlador eliminar el uso de este circuito. El comparador DTL ciertamente tiene una fácil implementación, pero introduce ruido en la tarjeta de control, por lo que debe tenerse un cuidado especial en el diseño de la misma para que ésta no se vea afectada.
El tiempo de establecimiento determina la rapidez del sistema ante alguna perturbación, por io que mientras menor sea el sistema final es mejor. La distorsión armónica total determina el desempeño en estado estacionario del convertidor, aún más cuando se trata de cargas no lineales de tipo puente rectificador más filtro. El máximo sobre impulso también indica la capacidad del sistema retroalimentado para rechazar perturbaciones, por lo que nuevamente es mejor mientras menor sea el sistema.
Las diferentes técnicas de control implementadas poseen en general buenas características, sin embargo algunas de ellas son mejores que las otras en algunos aspectos.
Como se aprecia en la Tabla 3.1, la técnica MPBC y NLC son las que tienen menos problemas en emisión de ruido, ya que tienen una frecuencia de conmutación fija y no utilizan el comparador DTL. De estas dos técnicas la mejor opción debido al
94
ESTUDIO E IMPLEMENTACIÓN DE ESTRATECM DE CONTROL PARA EL iNVERSOR ELEVADOR
costo y características introducidas al sistema es la NLC, sólo que este controlador tiene problemas a plena carga.
De las técnicas SMC y SMCSS la diferencia está únicamente en los sensores de corriente, por lo que debido al costo la técnica SMCSS es la mejor opción de estas dos, aunque tiene un poco más de problemas por la emisión de ruido por el comparador DTL, la técnica SMC ofrece mejores resultados en cuanto a respuesta dinámica.
La técnica PSMC definitivamente debería ofrecer mejores Características que la técnica SMCSS, ya que se aprovechan las características de pasividad y el control por modos deslizantes, pero además de ser más costosa y complicada de implementar, tiene problemas en estado estacionario debido a los parásitos.
Tabla 3.1 Comparación de estrategias implementadas.
Sensores de corriente
THD carga resistiva
Máximo sobre impulso
Con respecto a la distorsión armónica total (THD), el que presentó los mejores resultados fue el SMC y el de peor resultados es el PSMC. De todas formas es
95
ESTUDIO E fMPLEMENTACI6N DE ESTRATEGIAS DE CONTROL PARA EL INVERSOR ELEVADOR
importante notar a pesar de que la técnica PSMC resultó con la peor THD, no es del todo mala.
Finalmente las técnicas con los mejores resultados son el SMC y el NLC, sólo que ésta última es sensible a oscilaciones en la tensión de entrada. Es importante notar que estos comentarios son tomando a los controladores implementados como caja negra.
96
Capítulo 4
IMPLEMENTACI~N DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN ININTERRUMPIBLE
En este capítulo se presentan diferentes esquemas de sistemas de alimentación inintemunpible basados en el inversor elevador. Uno de los esquemas utiliza un cargador de baterías integrado, otro esquema utiliza un cargador de baterías por separado. Se esbozan otras posibilidades de sistemas de alimentación inintemunpible, pero que se plantean como trabajos futuros. Finalmente se presenta una comparación de los SAi implementados con otros esquemas.
97
JMPLEMENTACí6N DEL INVERSOR ELEVADOR EN SISTEMAS DE ALJMENTACIÓN INMTERRUMPBLE
4.1 Sistemas de alimentación ininterrurnpible.
Existe una gran diversidad de sistemas de alimentación inintenumpible propuestos en la literatura, como se describió en el capítulo uno, pero la mayoría utiliza múltiples etapas, o bien un número reducido de etapas pero con un bus de baterías de alta tensión, o con una gran cantidad de componentes.
El inversor elevador se había propuesto anteriormente en [ 5 ] y [6], como una opción para implementar un SAI, pero no se había implementado un esquema basado en él. En este capítulo se proponen diferentes esquemas donde se puede utilizar el inversor elevador.
4.2 Esquema con cargador de baterías integrado
El esquema de SAI propuesto utiliza un cargador de baterías integrado propuesto en [53]. El circuito de potencia propuesto se muestra en la Fig. 4.1, Solamente se utilizan dos etapas, el cargador de baterías integrado y el inversor elevador.
Figura 4.1 Circuito de potencia del SAI con cargador de baterías integrado
El SAI tiene muy buenas características: una estructura simple, demanda una comente con un alto factor de potencia, la tensión de salida tiene un bajo contenido armónico (THD) y una buena respuesta dinámica. El sistema completo tiene alta eficiencia y, por utilizar pocos dispositivos, un bajo costo.
El cargador de baterías está basado en un convertidor flyback, con el cual se logra obtener un alto factor de potencia, cargar la batería, además de proporcionar aislamiento entre la tensión de línea y la tensión de salida. El convertidor puede
98
IMPLEMENTAC16N DEL iIWERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN NNTERRUMPBLE
operarse en modo discontinuo de conducción o en modo continuo de conducción. Si se trabaja en discontinuo el circuito de control a utilizar es muy sencillo, ya que sólo se debe preocupar por mantener una tensión y no por obtener un alto factor de potencia, ya que de manera natural se demanda una corriente con un alto factor de potencia.
La segunda etapa es el inversor elevador, el cual puede elevar e invertir en la misma etapa de conversión. Su funcionamiento fue descrito en el capítulo 2, por io que sólo se abordará con detalle el cargador de baterías, y se mostraran resultados del funcionamiento del sistema completo.
4.2.1 Cargador de baterías.
El circuito del cargador de baterías se muestra en la Fig. 4.2. Como puede verse en la figura el convertidor tiene dos entradas, una de ellas es la tensión de línea y la otra a través del arreglo de baterías. El convertidor tiene tres modos de operación [53]: modo normal, modo energía almacenada (respaldo) y modo cargador. El interruptor Ql controla la transferencia de energía en los modos normal y cargador, el interruptor Q2 opera cuando el sistema esta en modo de energía almacenada.
VAC
2/
Figura 4.2 Cargador de baterías integrado
En modo normal, se mantiene encendido Q2 y Qi está conmutando, de manera que el primario L1 se carga de la tensión de línea cuando Qi se prende. Cuando se apaga Q i la energía almacenada en el transformador se descarga a través del secundario L3.
En modo cargador, la diferencia la hace Q2. Este interruptor se mantiene apagado y Qi está conmutando. Cuando Qi se prende, la inductancia resultante de Li y b almacenará energía siempre y cuando el diodo parásito de Q3 lo permita, es decir cuando la tensión de línea sea mayor que la tensión de baterías. Si la inductancia resultante almacena energía, entonces cuando el interruptor Qi se apaga se descarga la
99
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN INiNTERRUMPIBLE
energía a través de Lz.
El modo energía almacenada ocurre cuando se detecta una falla en la línea de alimentación, por lo que en ese instante Qi se apaga, Q2 se mantiene prendido, y Q3 está conmutando. De esta forma cuando Q3 se prende se almacena energía en L2, cuando Q3 se apaga la energía se descarga a través de L3.
El convertidor flyback es operado en modo discontinuo de conducción, por lo que en modo normal y cargador, la comente demandada por el convertidor es como la de una carga cuasi-resistiva, a la que solo es necesario ponerle un filtro para obtener una comente continua con forme de senoide rectificada.
El sistema incluye un circuito lógico que determina las señales de control para los interruptores, esto es de acuerdo a las condiciones de la batena (si debe cargarse o no) y la tensión de línea (si falla o no). El circuito lógico se obtuvo utilizando mapas de Kamaugh, el circuito resultante se muestra en la Fig. 4.3
Linea
Vbat -
1 O
Si la bateria esta baja Si la batena esta carg:
mat =
1 Si la línea no falla I O Si la línea falla Linea =
Q, =Linea Q, = (Vbat + Linea)’ Q2 =(Vbat*Linea)’
Figura 4.3 Circuito lógico para controlar los interruptores
4.2.2 Sistema completo.
Al sistema completo se le practicaron diferentes pruebas de operación. Se probó en modo normal, modo cargador y modo energía almacenada. Se hizo un cambio de carga resistivo, se probó ante carga no lineal y finalmente se hicieron pruebas de falla de la tensión de línea.
4.2.2.1 Modo normal y cargador.
En modo normal, la distorsión armónica de la corriente de entrada es de 6.5% y el factor de potencia de 0.98. En modo cargador la corriente de entrada tiene una distorsión armónica del 21% y el factor de potencia es de 0.91.
I O0
MPLEMENTACI6N DEL INVERSOR ELEVADOR EN SJSTEMAS DE ALIMENTACIÓN ININTERRUMPBLE
En la Fig 4.4 se muestra la respuesta del sistema cuando el cargador de baterías cambia del modo normal al modo cargador de baterías. En la figura se muestra la comente de entrada, la tensión del bus de cd intermedio (VCO), la tensión y corriente de salida. Se puede observar cómo la corriente cambia su forma debido a la forma de operación del cargador de la batería.
. . . . . . . . . . .. . . . , , t
Figura 4.4 Cambio de modo normal a modo cargador
4.2.2.2 Cambio de carga.
Con el propósito de verificar el desempeño del sistema ante un cambio de carga, se hizo un cambio de carga de lOOW a 200W y viceversa. En la Fig. 4.5 se muestran la corriente de entrada, la tensión del bus intermedio, la tensión y la comente de salida. En dicha figura se puede ver que el sistema tiene un buen desempeño, a pesar de que la tensión del bus intermedio tiene una pequeña caída; la comente de entrada tiene una respuesta relativamente lenta, debido a que el ancho de banda del controlador es reducido para que se corrija el factor de potencia.
4.2.2.3 Carga no lineal.
El sistema se probó ante una carga no lineal formada por un puente rectificador, un capacitor como filtro y una resistencia. En la Fig. 4.6 se muestra la corriente de entrada, la tensión de bus intermedio, la tensión y corriente de salida. Se puede ver en la figura una pequeña deformación que aparece en la tensión de salida cuando la comente se incrementa bruscamente; la distorsión armónica de la tensión de salida es 4.5%. También se refleja una distorsión en la corriente de entrada, esto se debe a la caída de tensión del bus intermedio cuando se demanda bruscamente la corriente. La distorsión armónica de la corriente de entrada es del 20%.
101
MPLEMENTACIÓN DEL NVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN INmERRUMPIBLE
Figura 4.5 Cambio de carga
4.2.2.4 Falla de línea.
En la Fig. 4.7 se ilustra el comportamiento del sistema cuando la tensión de línea falla. Se muestra la corriente de entrada, la señal del detector de falla de línea, tensión y corriente de salida, cuando la tensión de línea falla. Se puede ver que el sistema cambia de modo normal a modo respaldo rápidamente, manteniéndose la tensión de salida sin disturbios.
En la Fig. 4.8 se muestra la respuesta del sistema cuando regresa la línea de alimentación, como se puede ver la tensión de salida se mantiene regulada sin transitorios.
1 o2
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALíMENTACIÓN "TERRUMPIBLE
Figura 4.7 Faila de la tensión de linea
Figura 4.8 Regreso de la tensión de linea
4.2.2.5 Eficiencia.
En la Fig. 4.9 se muestra la eficiencia del sistema de alimentación ininterrumpible operando en modo normal. La eficiencia máxima es del 8O%, esto debido a las dos etapas en cascada. En modo energía almacenada las pérdidas se deben iuiicamente ai inversor elevador. La eficiencia se detalla en el capítulo dos y tiene su valor máximo por encima del 90%.
103
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN i”TERRUMPIBLE
20 50 80 110 140 170 200
Potencia de salida (W)
Figura 4.9 Eficiencia del SAI
4.3 Esquema con cargador de baterías separado
El esquema de S A i que se propone en este punto es un esquema de doble conversión, cuyo circuito se muestra en la Fig. 4.10. Este idea utiliza tres convertidores: un convertidor flyback, un cargador de baterías y el inversor elevador. El esquema propuesto no requiere de un circuito que detecte la falla de línea, ya que la batería entra instantáneamente cuando ocurre la falla.
El convertidor flyback es utilizado para corregir el factor de potencia, este convertidor es operado en modo discontinuo de conducción, de forma que se corrige de manera natural el factor de potencia. Por ello se utiliza un control tradicional para regular la tensión del bus de cd (VCI).
- Figura 4.10 SAI can cargador de baterías separado
El bus de cd (VC,) es la tensión que alimenta ai inversor elevador, el cual finalmente alimenta a la carga con una tensión de buena calidad. El cargador de
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN ININTERRUMPBLE
baterías es un convertidor cd/cd reductor operado en modo de conducción continua, el cual utiliza un control tradicional para cargar la batería; el bus de cd también alimenta ai cargador de baterías
Las señales PWM del cargador de batenas y el corrector del factor de potencia son independientes, pero están sincronizados y operando a la misma frecuencia de conmutación.
4.3.1 Modos de operación
El S A i propuesto opera en tres modos: normal, energía almacenada y cargador. En modo normal ( Fig. 4.1 1 ) el convertidor flyback suministra energía al capacitor Ci, el cual demanda a la línea una comente con un alto factor de potencia. El inversor elevador se alimenta del capacitor Ci para proporcionar la tensión senoidal de salida. La tensión del capacitor Ci es mayor en todo momento que la tensión del bus de baterías.
El modo cargador ocurre cuando se detecta que la batería necesita estar cargada, haciendo que el convertidor cdcd reductor le suministre UM corriente constante, y este modo termina cuando la batería finalmente se carga. El convertidor flyback y el inversor elevador operan como en el modo normal. La tensión del capacitor Ci se mantiene en todo momento por encima de la tensión del bus de baterías.
Figura 4.1 1 Modo normal de operación.
El modo energía almacenada (respaldo) ocurre cuando falla el suministro de energía de la red eléctrica, por io que el convertidor flyback no puede regular la tensión del capacitor C,, haciendo que su tensión se descargue hasta el punto en que el bus de baterías se hace mayor que esta tensión, provocando la conducción del diodo D, (Fig. 4.12).
IMPLEMENTACI~N DEL INVERSOR ELEVADOR EN SISTEMAS DE ALMENTACI~N ININTERRUMPBLE
Figura 4.12 Modo energía almacenada.
Cuando la línea regresa, el convertidor flyback vuelve a tener el control de la tensión de CI haciendo que éste se cargue por encima del bus de baterías, permitiendo que la batería se desconecte debido a que el diodo D, se polariza inversamente.
4.3.2 Sistema completo.
El sistema completo se probó ante diferentes condiciones de operación. Modo normal, modo energía almacenada, cambios de carga resistivo, carga no lineal y finalmente pruebas de falla de la tensión de línea. El sistema fue diseñado para una potencia de 300W.
4.3.2.1 Modo normal
En las Fig. 4.13 y 4.14 se muestran las formas de onda del convertidor operado en modo normal; en la Fig. 4.13 se muestra la tensión y comente de salida, en la Fig. 4.14 se muestra la tensión y comente de entrada. La distorsión armónica de la comente de entrada fue de 4.7% y el factor de potencia de 0.99.
1 I . , * i I ,;-. ,,.& 0161 Lrm tmJ
Figura 4.13 Modo normal, tensión y corriente de salida.
106
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN INRrl7ERRUMPIBLE
Figura 4.14 Modo normal, tensión y comente de entrada.
4.3.2.2 Cambio de carga
Con el propósito de verificar el desempeño del sistema ante un cambio de carga, se hizo un cambio de carga del 20% al 80% de la potencia nominal y viceversa. En la Fig. 4.15 se muestran la tensión y corriente de salida, en dicha figura se puede ver que el sistema tiene un buen desempeño.
" ) .
arm Sd d€d
Figura 4.15 Cambio de carga.
4.3.2.3 Carga no lineal.
El sistema se probó ante una carga no lineal de 350VA (puente rectificador y filtro), en la Fig. 4.16 se muestra la corriente de de salida y la tensión de salida. Se puede ver en la figura que aparece una pequeña deformación en la tensión de salida cuando la corriente se incrementa bruscamente; la distorsión armónica de la tensión de
I07
IMPLEMENTACI6N DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN NNTERRUMPBLE
salida es de 4.7%.
Figura 4.16 Carga no lineal.
4.3.2.4 Falla de línea.
El sistema se probó ante una falla de línea. En la Fig. 4.17 se muestran la corriente de la batería y la tensión de salida cuando la tensión de línea falla. Se puede ver que el sistema cambia de modo normal a modo respaldo rápidamente, manteniéndose la tensión de salida sin disturbios
lWm31reww 9 . W ~ V L ,.-....«I..<..4. -...I. 1
nii6n do adIda .. ,...... .i-i-..
Figura 4.17 Falla de la línea de alimentación.
En la Fig. 4.18 se muestra la respuesta del sistema cuando regresa la línea de alimentación, en la figura se muestra la comente de entrada y la tensión de salida. Como se puede ver la tensión de salida se mantiene regulada sin transitorios.
108
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN ININTERRUMPBLE
. . . .
Conlente da c n h d a Conlente da c n h d a
Figura 4.18 Regreso de la línea de alimentación.
4.3.2.5 Eficiencia.
La eficiencia de este esquema de sistema de alimentación inintemunpible es igual que el esquema anterior, esto se debe a que los convertidores en operación modo normal y energía almacenada son los mismos en ambos casos; la diferencia entre ambos esquemas es la forma de carga la batería. Por lo que la
4.4 Propuesta de otros esquemas.
Otro esquema de SAi que se propone utilizando el inversor elevador es el mostrado en la Fig. 4.19, el cual no incluye aislamiento. El convertidor funciona de forma similar al reportado en [40], pero utiliza un bus de baterías pequeño por el uso del inversor elevador, además de incluir un cargador de baterías para darle un buen manejo a esta. Este es un esquema de SA1 interactivo.
- I
Figura 4.19 S A I sin aislamiento basado en el inversor elevador.
1 o9
IMPLEMENTACIÓN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACI~N ININTERRUMPBLE
En la Fig. 4.20 se muestra otro esquema, el cual utiliza únicamente dos convertidores, el cargador de baterías integrado y el inversor elevador; es importante notar que se utiliza un cantidad mínima de semiconductores . El esquema permite un alto factor de potencia debido a que el convertidor de entrada es operado en discontinuo, además de un buen manejo a la batería.
Va
n. - 1 r
I I I 4 I
Ir _T
vb
L Figura 4.20 SAi de dos etapas y pocos dispositivos.
4.5 Comparación con esquemas reportados por otros autores.
En esta sección se hace una comparación de los SAI presentados en este capítulo con otros esquemas reportados en la literatura. Los elementos que se comparan son número de etapas, cantidad de semiconductores, bus de baterías, aislamiento, complejidad de operación, THD de la corriente de entrada y eficiencia. Se comparan los SAI de doble conversión, esto de acuerdo a las clasificación de SAI’s presentada en el capítulo uno.
Los S A I comparados son los dos esquemas implementados y algunos de los considerados como los mejores de los reportados en la literatura: el esquema aquí propuesto con un cargador de baterías integrado (SAIPl), el esquema aquí propuesto con cargador de baterías separado(SAIP2) y los esquemas reportados en la literatura , los cuales fueron presentados en el capítulo uno. El análisis comparativo se resume en la Tabla 4.1.
En la Tabla 4.1 se muestra que el mejor esquema de los reportados en la literatura por número de etapas, es el reportado en [39], pero no es la mejor opción, ya que tiene un bajo factor de potencia debido a que la comente de entrada tiene una alta THD, además de que se utiliza un transformador de baja frecuencia, resultando un sistema pesado y voluminoso.
110
-
MPLEMENTACIbN DEL INVERSOR ELEVADOR EN SISTEMAS DE ALIMENTACIÓN ININTERRUMPIBLE
3
3
2
Esquema I, reportado en
Esauema 80%
Muy baja Buena 2 12 bajo Total Alta
Entrada/ Media Muy baja Muy buena 6 8 alto Salida 90%
Alta Muybuena 4 6 alto Entradal Baja Salida 90%
(de baja frecuencia)
1 r e p o k e n
Esquema reportado en
Esquema reportado en
Esquema reportado en
[391 I
El segundo mejor esquema de los reportados en la literatura por la eficiencia es el de [38], esto se debe a que incluye conmutación suave en el primer convertidor y el inversor es de polaridad. Sin embargo, tiene la gran desventaja de que el bus de baterías es alto, lo que trae como resultado un sistema pesado y con un mantenimiento complicado para las baterías.
Los otros esquemas reportados en la literatura, sin duda son buenos esquemas por sus características, pero utilizan muchos componentes y son relativamente complejos en su operación.
Los esquemas propuestos e implementados en este capítulo mejoran las características de dichos esquemas por el número de etapas, o bien por la cantidad de semiconductores utilizados. Esto se debe en gran medida al uso del inversor con capacidad de elevación: el inversor elevador.
111
CONCLUSIONES
OS sistemas de alimentación ininterrumpible reportados en la literatura presentan L diversas desventajas que pueden ser: uso de múltiples etapas, bus de baterías de alta tensión, o bien muchos componentes. Para mejorar las características de estos sistemas se propone el uso del inversores con capacidad de elevación de tensión, por lo que no tan sólo la eficiencia se beneficia, sino también el costo.
Los inversores con capacidad de elevación, a diferencia de los inversores tradicionales, pueden además de invertir elevar tensión. Dichos convertidores están constituidos por dos convertidores cdícd bidireccionales en comente. Se estudiaron e implementaron los esquemas de inversores basados en convertidores cdícd elevador y reductor/elevador, ya que son los que utilizan un mínimo de componentes y que realmente significan un ahorro. Se concluye del análisis que el inversor elevador es mejor opción que el inversor reductor elevador, ya que tiene la ventaja de tener un capacitor más pequeño y menor contaminación, aunque las diferencias son mínimas entre ambos inversores.
Así mismo se estudiaron diversas estrategias de control. El control por modos deslizantes proporciona mejores características de respuesta dinámica y estabilidad del sistema retroalimentado ante variaciones grandes de carga que las estrategias de control tradicionales. El control basado en pasividad ofrece Características de estabilidad inherentes por la teoría que envuelve al diseño. El controlador no lineal evita el uso de sensores de corriente y por lo tanto su implicación en reducción de costo. Además se estudiaron variantes de las técnicas mencionadas.
El propósito de utilizar una buena estrategia de control es poder suministrar una tensión de salida senoidal con la mínima distorsión posible sin importar el tipo de carga que se le presente.
Finalmente fueron implementados y probados con el inversor elevador cinco controladores, cada uno con ventajas y desventajas. Realmente todas las estrategias de control implementadas tienen buenas características en cuanto a respuesta dinámica, por lo que los criterios que determinan cual de las estrategias es la mejor, pueden ser el costo, la facilidad de implementación y la emisión de ruido.
Como se discute en el capítulo tres, realmente discernir entre una técnica y otra es complicado, pero basándose en el costo, el controlador no lineal con sólo retroalimentación de tensión (NLC) y el controlador por modos deslizantes sin sensores de comente (SMCSS) serían las mejores debido a que se elimina el uso de sensores de
I12
comente, aunque la técnica NLC, que utiliza un divisor, es un poco más costosa y complicada de implementar y tiene problemas a plena carga.
Las técnicas que ofrecen las mejores características de respuesta dinámica son el controlador por modos deslizantes (SMC) y el controlador no lineal con sólo retroalimentación de tensión (NLC). Se supone que el controlador PSMC debería tener la mejor respuesta, pero como tiene un problema en estado estacionario, no es evidente la rapidez.
Las técnicas con una menor emisión de ruido son el controlador basado en pasividad (MPBC) y el controlador no lineal con sólo retroalimentación de tensión (NLC).
Es importante resaltar que estas características son de acuerdo a la forma de implementación; ya que por ejemplo el control por modos deslizantes puede implementarse con frecuencia fija, disminuyendo la emisión de ruido, y para ello es necesario cambiar la forma en que se implementó, complicándola un poco más.
También se propusieron e implementaron diversos esquemas de S A I que utilizan el inversor elevador. Con estos esquemas se logra una reducción efectiva de etapas y componentes comparado con los esquemas reportados en la literatura. Se estudió un esquema con un cargador de baterías integrado y otro con el cargador de baterías en forma separada.
Logros obtenidos
La presente tesis dio lugar a varias publicaciones. En congresos internacionales de electrónica de potencia como IEEE Power Electronics Especialists Conference PESC, IEEE Applied Power Electronics Conference APEC, IEEE Internacional Simposioum on Industrial Electronics ISIE. En congresos internacionales de control como el Congreso Latinoamericano en Control Automático CLCA. Y en una revista de electrónica de potencia, IEEE Transactions on Power Electronics.
Los artículos más importantes publicados son:
N. Vazquez, D. Cortés, C. Hernandez, J. Alvarez, J. Arau, Jq Alvarez. “A New Non Lineal Control Strategy for the Boost Inverter” IEEE Power Electronics Specialists Conference PESC’OL Junio 2003. Acapulco, México. pp 1403-1407. N. Vázquez, C. Hemández, J. Alvarez, J. Arau. “Sliding Mode Control for DCDC converters: a New Sliding Surface” IEEE International Symposium on Industrial Electronics ISIE’03. Junio 2003. Rio de Janeiro, Brasil.
113
.
N. Vázquez, C. Aguilar, R. Cáceres, I. Barbi, J. Alvarez, J.Arau. “A Novel Unintemptible Power Supply System with Active Power Factor Correction” IEEE Transactions on Power Electronics. Vol 17, no. 3 , mayo 2002, pp 405- 412. N. Vázquez, J. Alvarez, J. Arau.“Passivis Based Control for the Boost inverter: Details of Implementation” Congreso Latino-americano en Control Automático CLCA ’02. E. Rodriguez, N. Vázquez, C. Hernández, H. Visairo, J. Arau. “A Novel AC- UPS with PFC and Fast Dynamic Response”, IEEE Applied Power Electronics Conference -APEC’OI, pp. 893 - 899 N. Vázquez, J. Almazan, J. Alvarez, C. Aguilar, J. Arau. “Analysis and Experimental Study of the Buck, Boost and Buck-Boost Inverters”, IEEE Power Electronics Specialists Conference -PESC’99, pp. 801 - 806
Hay otras publicaciones del trabajo de tesis, pero en congresos de un poco menor relevancia.
También como parte de la formación doctoral se asesoraron diferentes tesis de maestría, tres de ellas en tópicos diferentes a la que se realizó la investigación del tema de tesis doctoral. Los artículos más importantes publicados son:
C. Hernández, N. Vázquez, E. Rodriguez, R. Osorio, J. Arau. “Voltage Regulator with Unity Power Factor and High Efficiency” ZEEE Power Electronics Specialists Conference -PESC’OI, pp. 1653 - 1658 N. Vázquez, J. Lopez, C. Hernández, E. Rodriguez, J. Arau. “A Different Approach to implement an Active Input Current Shaper” ZEEE Power Electronics Specialists Conference -PESC’O2, pp. 1126-1 13 1
Trabajos futuros
En el desarrollo de la tesis se vislumbraron otros posibles trabajos dentro del tema, algunos de ellos encaminados a tratar de eliminar en la medida de lo posible el reciclado de energía de los inversores con capacidad de elevación y así incrementar su eficiencia. Para esto podrían utilizarse técnicas para procesar menos la energía como las estudiadas en convertidores cdcd con alto factor de potencia. Otra forma de incrementar la eficiencia del convertidor es utilizar la técnica de conmutación suave.
El esquema del inversor elevador puede extrapolarse también a sistemas trifásicos, ampliándose así la versatilidad del convertidor. En el apéndice B se presenta un breve estudio de la configuración trifásica del inversor elevador, pero todavía pueden realizarse estudios sobre dichos convertidores.
114
También pueden estudiarse diferentes esquemas de SAI que se basen en el inversor elevador, algunos de ellos mencionados ai final del capítulo cuatro
Los inversores con capacidad de elevación fueron propuestos para los sistemas de alimentación ininterrumpible, esto debido a las ventajas de elevar e invertir en una sola etapa. Sin embargo su uso puede extenderse a otras aplicaciones: por ejemplo en sistemas fotovoltaicos, donde dependiendo de la aplicación es necesario producir una tensión alterna a partir de un bus de corriente directa de 48V [54].
En el desarrollo de la tesis se estudiaron e implementaron diferentes técnicas de control para el inversor con capacidad de elevación, sin embargo el área de control es tan amplia que es posible estudiar otras técnicas de control que permitan obtener un mejor desempeño del sistema.
115
Referencias.
G . P. Hicks, A Review of AC UPS Technolow (Final Reuort), Electrical Engineering Centre, July 1992 R. Redl, A. S. Kislovski. “ Telecom Power Supplies And Power Qualitf’, Proceedings of
IEC 62040-3, “Sistemas de Alimentación Ininterrumpible”, Norma Internacional. Primera Edición 1999-03
INTELEC’95. pp 13-21.
N. Mohan, Undeland, Robbins. Power Electronics: Converters, Auulications and Desipn. Ed. John Wiley & Sons, 1989 N. VáZquez. “Nueva Estructura de Inversor Basada en el Convertidor cdcd del Tipo Elevador” Tesis de maestría, CENIDET, Mexico, Nov 1997 R. Cáceres, I Barbi. “A boost dc/ac Converter: Analysis, Design, and Experimentation”. IEEE Transactions on Power Electronics, vol. 14, No 1, January 1999. pp 134-141 K. Harada, H. Sakamoto, and M Shoyama, “Phasdontrolled dc/ac Converter with High- Frequency Switching”. IEEE Transactions on Power Electronics, Vol 3, No 4, October
M. Matsui, M. Nagai, M. Mochimki, A, Nabae. “High Frequency Link dc/ac Converter with Suppressed Voltage Clamp Circuits- Naturally Commutated Phase Angle Control with Self Turn-Off Devices”. IEEE Transactions on Industry Applications, VOW, No 2, MarcWApril 1996, pp 293-300 J.H.R. Enslin, J.D. van Wyk, P. van Rhyn, J.J. Schoeman. “Low-Voltage, High-Efficiency Switch-Mode High-Power Inverter for ac Link Converter Applications”. IEEE Transactions on Industrial Electronics, Vol 37, No2, April 1990. pp 167-172.
1988. pp 406-41 1
[lO]D. Dalal. “A Unique Four Quadrant Flyback Converter”. Power supply design seminar 1997. Unitrode. pp 5.1-5.15
[ll]P. N. Enjeti, Phoivos D. Ziogas, James F. Lindsay. “Programed PWM Techniques to Eliminate Harmonics: A Critical Evaluation”, IEEE Transactions on Industry Applications, Vol. 26, No. 2, March /April 1990, pp 302-316.
[12]M. A. Boost, Phoivos D. Ziogas. “State-of-the-& Carrier PWM Techniques: A Critical Evaluation”. IEEE Transactions on Indushy Applications, Vol. 24, No. 2, MarchíApril 1988, pp 271-280.
[13lS.C. Bansal, M.E. and U.M. Rao, M. Tech. “Evaluation of P.W.M. Inverter Schemes”. - . Proc. IEE, Vol. 125, No. 4, April 1978, pp 328-334.
[ 141 M. Carpita, M. Marchesoni, “Experimental Study of a Power Conditioning Using Sliding Mode Control”, IEEE Transactions on Power Electronics, vol. 11 No. 5, Sept. 1996, pp. 731 - 742
[15]M.J. Ryan, W. E. Brumsickle, R. D. Loren, “Control Topology Options for Single-phase U P S Inverters”. IEEE Transactions on Industry Applications, Vol 33, No 2, MarcWApril
[16]N.M. Abdel-Rahim, J.E. Quaicoe. “Analysis and Design of a Multiple Feedback Loop Control Strategy for Single-Phase Voltage-Source UPS Inverters”. IEEE Transactions on Power Electronics, vol 11, No 4, July 1996. pp 532-541
1997. pp 493-501.
[i71p’ O. L. MmoYo, T. Meynard, E. Lefeuvre. “A new control strategy for the Boost DC-AC Inverter”. ZEEE Power Electronics Specialists Conference p ~ ~ c ’ o ~ ,
[181Kawmura7 R. ChuaraYaPratip, T. Haneyoshi. “Deadbeat Control of p w Inverter with Modified Puke Pattern for Uninterruptible Power Supply”. IEEE Transactions on Industn’alElectronics, vol 35 , NO 2, May 1988. pp 295-300.
[191 s. Buso, s Fasolo, p. Mattavelli. “Uninterruptihle Power Supply Multiloop Control Employing Digital Predictive Voltage and Current Regulators ”. IEEE Transactions on IndusQ Applications, vol 37, No 6, NovembedDecember 2001. pp1846-1854
[20] S.L. Jung, H.S. Huang, M.Y. Chang, Y.Y. Tzou. “DSP-Based Multiple-Loop Control Strategy for Single-phase Inverters Used in AC Power Sources”. IEEE Power Electronics Specialists Conference PESC’97. Saint Louis, Missouri, Vol 2. pp 706-712
[21]L. Chem, J. Chang, C.H. Chen, H. T. Su. “Micropocessor-Based Modified Discrete Integral Variable-Structure Control for UPS”. ZEEE transactions on industrial Electronics, vol 46, No 2, April 1999. pp 340-348.
[22]T.L. Tai, J.S. Chen. “UPS Inverter Design Using Discrete-Time Sliding Mode Control Scheme”. ZEEE Transactions on Industrial Electronics, Vol 49, No 1, February 2002. pp
[23]S.L. Jung, Y.Y. Tzou. “Discrete Sliding-Mode Control of a PWM Inverter for Sinusoidal Output Waveform Synthesis with Optimal Sliding Curve”. IEEE Transactions on Power Electronics, vol 11, No 4, July 1996. pp 567-577.
[24] S.R. Bowes. “Advanced regular-sampled PWM control techniques for drives and Static Power Converters” IEEE Transactions on Industrial Electronics, Vol 42, NO 4, September 1995. pp 521-531.
[25]T.S. Lee, S.J. Chiang, J. M. Chang. “H infinitum Loop-Shaping Controller Designs for the Single-phase UPS Inverters”. IEEE Transactions on Power Electronics, vol 16, No 4, July
[26]X. Sun, M.H.L. Chow, F.H.F. Leung, D. Xu, Y.Wang, Y.S. Lee. “Analogue Implementation of a Neural Network Controller for UPS Inverter Applications’’ IEEE Transactions on Power Electronics, vol. 17, NO 3 May 2002. PP 305-313.
[27]G. Alarcon, V. Cárdenas, S. R a h e z , N. Visairo, C, Nuñez, M. Oliver, H. Sua Ramirez. ‘Won-linear passive control with inductor current feedback for an UPS inverter”. IEEE Power Electronics Specialists Conference -PESC‘OO, pp. 1414 - 1418
[28] R. Ortega, A. Loria, P. Nicklasson, H. Sira. Passivity-based control of Euler-Lamange Systems. Ed. Springer, 1998
[29]N. Vazquez, C. Aguilar, J. Alvarez, J. Arau. “Some Critical Aspects In Sliduig Mode Control Design For The Boost Inverter”, IEEE Internacional Power Electronics Congress CIEP ‘98, Oct/98, Morelia, México. pp. 76-81
[3O]P. Mattavelli, L. Rossetto, G. Spiazzi, “General Purpose Sliding Mode Controller For DcDc Converter Applications”, IEEE Power Electronics Specialists Conference -
[31]R. A. DeCarlo, S. Zak, G. P. Matthews, ‘‘Variable Structure Control of Nonlinear Multivariable Systems: A Tutorial”, Proceedings of the IEEE, vol. 76 NO. 3, March 1988, pp. 212 - 232
Vancouver, Canada, pp 974-979
67-75.
2001. pp 473-481.
PESC’93, pp. 609 - 615
117
. ..
[321D. J. Alvarez, Jq. Aivarez. “Robust Sliding Mode Control for the Boost I ~ ~ ~ ~ ~ ~ , , , IEEE Internacional Power Electronics Congress CIEP ‘02, oct/02, ~ ~ ~ h l ~ j ~ ~ ~ , México,
[331 s. Martinez, M. Castro, R. Antoranz, F. Aidana. “Off-Line Unintemptble power supply with Zero Transfer Time using Integrated Magnetics”. IEEE Transactions on Industrial Electronics, Vol. 36, No 3, August 1989, pp. 441-445.
134lJ.Y. Lee, Y.M. Chang, F.Y. Liu. “A New UPS Topology Employing a PFC Boost Rectifier Cascaded High-Frequency Tri-Port Converter”. IEEE Transactions on Industrial Electronics, vol 46, No. 4, August 1999. pp 803-813.
[35] R. Morrison, M. G. Egan. “A New Power-Factor-Corrected Single-Transformer UPS Design”. IEEE Transactions on Industy Applications, Vol 36, No 1, January/Februaiy 2000, pp 171-179
[36]H. Pinheko, P. Jain, G. JOOS. “A new AC Power Supply Based on Series-Parallel Resonant Converter”. IEEE Power Electronics Specialists Conference 1997. vol 1. pp 3 10-3 16
[37] H. Pinheiro, P.K. Jain, G. Joóz, “A Comparison of UPS for Powering Hybrid FibedCoaxiai Networks”. IEEE Transactions on Power Electronics”. Vol 17, No 3. May 2002. pp 389- 397
[38]M. A. Rooij, J. A. Ferreira, J. D. Van Wyk. “A Novel Unity Power Factor Low-EM Uninterruptible Power Supply”. IEEE Transactions on Industy Applications, Vol 34, No
[39]P.K. Jain, J. R. Espinoza, H. Jin. “Performance of a Single-Stage UPS System for Singie- Phase Trapezoidal-Shaped AC-Voltage Supplies”, IEEE Transactions on Power Electronics, Vol 13, No 5, September 1998. pp 912-923.
[40] J.C. Wu, H. L. Jou. “A new UPS Scheme Provides Harmonic Supresión and Input Power Factor Correction”. IEEE Transactions on Industrial Electronics, vol 42, No 6, December
r41lB.H. Kwon, J.H. Choi, T.W. Kim. “Improved Single-phase Line-Interactive UPS”. IEEE Transactions on Industrial Electronics, Vol 48, No 4, August 2001. pp 804-81 1
[42]R. Fuentes, H. Pinheiro. “Non-Isolated Single Phase UPS Based on Step-up Converters”. IEEE International Power Electronics Congress -CIEP’OO, October, Acapulco, Mexico.
[43] C. Cecati, A. Dell’Aquila, M. Liserre. “Análisis and Control of a Thee Phase dc/ac Step- up Converter”. International Symposium of Industrial Electronics ISIE ‘02, June 2002. pp
[a] J. Almazan. “Convertidor cd-ca, basado en el convertidor reductor-elevador, para aplicación en sistemas de alimentación ininterrumpible”. Tesis de maestría, Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET), Cuemavaca, México, Julio 2000
[45]V.I U t h , Sliding Modes And Their Application In Variable Structure Svstem, MIR Publishers, Moscow, 1974
[46]J. Y. Hung, W. Gao, J. C. Hung, “Variable Structure Control: A Survey”, ZEEE Transactions on Industrial Electronics, vol. 40, No. 1, Feb. 1993, pp. 2 - 18
[47] R. Sepulchre, M. Jankovic, P.V. Kokotovic. Constructive Nonlinear Control, Springer Verlag London, 1997.
pp. 7208-212
4, Jüly/AüguSt 1998, ~ ~ 8 7 0 - 8 7 7 .
1995. pp 629-635
pp 353-358
850-856.
118
[481B. J. Cardoso, A. F. Moreira, B.R. Menezes, P.C Cortko. “Analysis of Switching Frequency Reduction Methods Applied to Sliding Mode Controlled DC-DC Converters’’,
[49] J Fernando, Sonia S. Paulo. “ Fixed Frequency Sliding Mode Modulator for Current Mode PWM Inverters”. IEEE Power Electronics Specialists Conference -PESC’93, pp. 623 - 629.
[50]H. Sira Ramírez, R. Márquez, M. Fliess. “Sliding Mode Control of DC-to-DC power Converters Using Integral Reconstructor”, International Journal of Robust and Nonlinear Control, Abril 2002, 1 173- 1 186.
[51]V. Cardenas,.M. Oliver, N. Visairo, S. Ramírez, C. Nuñez, H. Sira-Ramírez. “Analysis and design of a three phase active shunt power filter based on the non-linear passivity approach”. IEEE Power Electronics Specialists Conference -PESC’99, pp. 224 - 229
[52]D. Cortes, “Reporte Interno de Avance de Doctorado”. CICESE. [53]C. Apilar, F. Canales, J. Arau, J. Sebastián and J. Uceda, “An Integrated Battery
ChargerDischarger with Power Factor Correction”. IEEE Transaction on Industrial Electronics, vol. 44, Oct. 1997, pp. 597403.
[54] R. Messenger, J. Ventre. Photovoltaic Systems Engineering. CRC press, 2000 [55]J.P. Cun, J.N. Fiorina, M.Fraisse, H. Mabboux,
Applied Power Electronics Conference and Exposition - APEC’92 . pp 403-410,
“Increasing UPS Battery Life: Main Failure, Charging and Monitoring Solutions”, IEEE International Telecommunications Energy Conference INTELEC’97, 1997, pp 389-396.
[56] J.P. cu, J.N. Fiorina, M.Fraisse, H. Mabboux, “The experience of a u p s Company in advanced battery monitoring”, IEEE International Telecommunications Energy Conference INTELEC‘96, 1996, pp 646-653.
[57]K. Ogata. Ingeniería de Control Moderna. Prentice Hall, 1980.
119
APÉNDICE A. Configuraciones de SA1
ENTRADA CA ETAPA RECTIFICADOFA INVERSORA
Existen diversas configuraciones de sistemas de alimentación inintempible reportadas en la literatura, la clasificación aquí presentada es acorde a la discutida en la norma EC 62040-3, en los apéndices A y B de dicha norma [ 3 ] .
Para que un SAI pueda hacer adecuadamente esta función se requiere de tres etapas, una etapa de rectificación (conversión caícd) con la cual se carga un batería que se utilizará para suministrar la energía cuando falla la línea de alimentación (cargador de baterías) y una etapa que convierte la tensión continua en tensión alterna con la que se alimentan los equipos eléctricos y electrónicos (convertidor cdca o inversor).
SAL1 DA CA
El esquema más sencillo de SAI es el que se muestra en la Fig. a. 1, consta de dos etapas, la primer etapa es un rectificador que tiene también la función de cargador de baterías, y la segunda etapa es la de inversión. En este esquema la Única manera de entregar energía a la carga es a través de dichas etapas y no se puede suministrar directamente de la línea de alimentación; es importante notar que la batería siempre está siendo cargada, aún en condiciones normales de operación (aunque la linea de alimentación no haya fallado), io que provoca que la batería se sobrecargue y por lo tanto disminuya su vida útil [ 5 5 ] .
vi x v 2 q3 x v 4 = TT
T T
BATERIA
Figura a: 1 Esquema simple de SAI
Una variante del esquema anterior que permite dar un mejor manejo a la batería, aumentando su vida útil, es utilizar el cargador de batenas por separado [55,56]. Este esquema se muestra en la Fig. a.2; a este esquema se le llama de doble conversión, por los modos de operación. Este esquema opera en modo normal cuando se entrega energía a la carga a través del rectificador y el inversor, donde la batería no interviene; y el esquema opera en modo de energía almacenada (respaldo) cuando la energía es entregada a la carga por medio de la batería y el inversor. En este esquema, al igual que en el anterior, no hay manera de entregar energía a la carga directamente de la línea de alimentación.
I
- ETAPA SALIDA CA ENTRADACA' BUS EE CD - INVERSORA - ............................................................... b
INTERRUPTOR
ENTRADA CA CARGADOR DE BATERIA (OPCIONAL)
'Las entradas pueden Ser cortocircuitadar 1 ' ..... .b M~~~ de fnergla AlmaCBnada
T T BATERIA
Figura a.2 Esquema SAI de doble conversión
Un esquema de SA1 más complicado es el llamado SAI de doble conversión con interruptor de transferencia, este esquema a diferencia del anterior permite el flujo de energía de la línea de alimentación a la carga sin que ésta pase a través de las etapas de rectificación e inversión; para ello se utiliza un interruptor (Fig. a.3). Esta configuración permite darle mantenimiento al SAI, o bien en caso de falla del SAI entregar energía a través de la línea de alimentación. Para una correcta operación la tensión de salida del inversor debe estar en fase y a la misma frecuencia de la tensión de entrada. A este esquema también se le suele llamar S A I en línea.
ENTRADA DIRECTA ENTRADA CA
-.-.-, ....-, INTERRUPTOR
DE TRANSFERENClA
ENTRADA CA ' ETAPA RECTIFICADORA INVERSORA -
................ +
-+ MWo Nwmal
..--+ M W o de Energia Almacenada
ENTRADACA
t 'Las entradas pueden serco<1oUrcuiladas - 1 -'+ Modoüireclo
T T BATERIA
SALIDACA
Figura a.3 Esquema SAI de doble conversión con interruptor de transferencia
Otro esquema de SA1 es el llamado SA1 interactivo, este esquema evita el uso de la etapa de rectificación, ya que la etapa inversora es utilizada con doble propósito (Fig. a.4). En el modo normal la energía es transferida directamente de la línea a la carga (a través de una interfase) y de ahí mismo se carga la batería a través de la etapa inversora, pero cuando falla la energía la etapa inversora es la encargada de entregar el suministro de energía a partir de la tensión de batería (modo respaldo o energía almacenada). En este esquema puede también utilizarse un interruptor de transferencia.
ENTRADA CA - Modo Normal ETAPA + Modo de Energia Almacenada
SALIDA CA INTERFAZ OE POTENCIA
ENTRADA CA
4 + INTERRUFTOR
DE TRANSFERENCIA
._ .. .- .. . I
Conexi6n Opcional ETAPA
SUIDA CA - 7
INVERSORA , , - MDdüNomial
t Modode Energia Almacenada ENTRADA CA CARGADOR !
DE BATERIA
Figura a.5 Esquema SAI pasivo
Otros esquemas de S A I son aquellos en los que con el propósito de ofrecer una mejor calidad de energía en caso de falla del SAI, se permite la redundancia. Se utilizan dos SAI's como se ve en la Fig. a.6, en caso de falla o mantenimiento de uno de ellos, el otro SAi suministra energía a la carga con las mismas prestaciones de tensión de salida.
ENTRADA CA 9
ENTRADA CA 4
‘Las entradas pueden ser carlocircuitadas
INTERRUPTOR
TRANSFERENCIA
Figura a.6 Esquema SAI con redundancia
Existen también esquemas de SAI que utilizan inversores y/o rectificadores en paralelo con la intención de suministrar una mayor potencia a la carga si es que se requiere, pero las configuraciones ya no cambian en su forma de operación con respecto a los esquemas anteriormente mencionados.
Es importante comentar que dependiendo de las caractensticas que se deseen en el SAi, éste se vuelve más complejo. Por ejemplo si se desea un SAi de doble conversión, que utilice un bus de baterías de baja tensión y que demande una comente con un alto factor de potencia, con el propósito de mejorar sus caractensticas, lo normal es que en el SA1 se agreguen dos bloques, uno que comja el factor de potencia y otro que eleve tensión.
IV
APÉNDICE B. Inversor elevador trifásico
El inversor elevador trifásico fue recientemente abordado en [43], pero anteriormente propuesto en [5] como trabajo futuro. En la Fig b. 1 e muestra el circuito del inversor elevador trifásico.
+ vo -
Vi
Figura b. 1 nversor elevador trifásico.
Un sistema trifásico debe producir, por definición, tensiones defasadas 120 grados. Por ello la tensión senoidal que debe producir cada convertidor cáícd elevador es similar al caso monofásico, sólo que el defasamiento entre la tensión de ramas es de 120 grados, es decir:
Va =Vd,+-sen(wt) V O P
J5
La tensión entre fases de un sistema trifásico típicamente es de 220V, aunque en la industria suele usarse también 440V. Para producir una tensión de 220V, es necesario que la tensión senoidal de Va sea de aproximadamente 179V pico. Es importante notar que para el caso monofásico la tensión senoidal montada en la componente de cd era de 85 V pico.
El análisis en estado estacionario del inversor elevador trifásico se hace bajo las mismas consideraciones que el caso monofásico. Las ecuaciones que se obtienen de
V
ganancia y ciclo de trabajo son similares. Para el caso trifásico se define la componente de directa como:
donde:
Por lo tanto la función de ganancia para la tensión entre fases resulta:
El ciclo de trabajo es:
Vin
Vdc + - sen (ut) D=1-
VOP
J?
De aquí, el ciclo de trabajo máximo ocurre en ut = n/2 :
De igual manera que en el caso monofásico, la corriente en el inductor depende de la tensión de rama, tensión de entrada y la corriente de salida. Pero en el caso trifásico la corriente de salida es la corriente de fase o rama, esto es:
donde: I , = Corriente de fase.
Si la carga está conectada en estrella la corriente es directamente la corriente de fase, pero si está conectada en delta, la corriente de fase depende de dos comentes.
VI
Para el caso resistivo y que la conexión entre ellas fuera la configuración tipo estrella, la comente de fase sería:
Sen(of ) VOP I , =- &Re
donde: R, = Resistencia en conexión estrella.
Si la carga resistiva estuviera conectada en configuración delta, la corriente de fase sería:
(b.9) I , =I,, - I ~ ~ = &-Sen(wt) V O P
Rd
donde: R, = Resistencia en conexión delta.
Sustituyendo (b.9) en (b.7) resulta que la corriente del inductor para la carga conectada en delta es:
Simplificando (b.lO) se obtiene:
Por lo tanto la corriente máxima del inductor es:
I , = -p GG,. + Js] Rd
La tensión máxima del capacitor de rama es:
En la Tabla b.1 se muestran las diferencias en esfuerzos de tensión y otros parámetros para el inversor trifásico y el caso monofásico. Se considera la misma tensión de entrada, la potencia del caso monofásico es de 300W y para el trifásico de
VI1
9OOW, la tensión de salida del caso monofásico es de 120V,, y para el tifásico 120Va, de fase a neutro (o bien 220Va, entre fases).
I , =16A
Tabla b.1 Tabla comparativa del inversor elevador monofásico y trifásico.
Gm = 3.54
inversor elevador
monofásico
inversor Elevador tsifásico
rLp = 28.32 A
Esfuerzo en tensión
Cp =V,(l+G,,)
Gm = 6.48
V, =217.92V
vop = 4" If- ( ?] Vap = 407.15 V
Esfuerzo en I Ganancia corriente máxima
Vop (1 + G, 1
Ciclo de
I D,, ~ 0 . 7 8
Simulaciones del inversor elevador tri~ásico.
En este apartado se muestran algunos resultados de simulación del inversor elevador trifásico. La técnica de control utilizada en los resultados es el control por modos deslizantes.
En la Fig. b.2 se muestran las tensiones de rama, la tensión entre fases y tensión de rama, y la corriente del inductor de una rama del inversor elevador trifásico, estos resultados son a una potencia de 900W. En la figura se puede apreciar el valor máximo de la tensión de la rama del inversor y el valor máximo en la comente del inductor, así mismo se aprecia el rizo de la corriente del inductor.
En la Fig. b.3 se muestra el funcionamiento del convertidor ante un cambio de carga. El cambio de carga se hizo al 50% en todas las fases.
VI11
nrrmpo (I)
o 401 0.02 om
Figura b.2 Simulación del inversor elevador trifásico ante una carga resistiva. De arriba para abajo: Tensiones de rama, tensión entre fases y corriente de rama, corriente en el inductor
Figura b.3 Simulación del inversor elevador trifásico ante un cambio de carga. De arriba para abajo: Formas de onda del inversor elevador trifásico ante un cambio de carga
IX
APÉNDICE C. Estabilidad de ecuaciones diferenciales
Una forma para determinar la estabilidad de una ecuación diferencial es utilizando una función de Lyapunov, pero esto no siempre es una tarea sencilla; de hecho una ecuación diferencial puede ser estable y no existir una función de Lyapunov que demuestre su estabilidad [47].
El teorema de estabilidad de Lyapunov establece lo siguiente [57]:
Sea el sistema descrito por:
x = f ( X A
f ( 0 , t ) =o, t l t donde:
c. 1
Si existe una función de escalar V ( X , t ) , llamada función de Lyapunov, con primeras derivadas parciales continuas y que satisfacen las siguientes condiciones:
1. V ( X , t ) es positiva definida 2. P’(X,t) es negativa definida
entonces el estado de equilibrio en el origen es uniforme y asintóticamente estable.
Si además V ( X , t ) + m cuando llX1l-f m , el estado de equilibrio en el origen es uniforme global y asintóticamente estable.
Para ejemplificar el uso de una función de Lyapunov para comprobar la estabilidad se proponen diferentes ecuaciones diferenciales.
Primer ejemplo
Sea el sistema:
X = - k c.2
Del cual se sabe que es estable si k > O , ya que su solución es x = Ce-’. Para demostrar la estabilidad se puede recurrir a la siguiente función de Lyapunov:
X
X Z V ( x , t ) = y L
Derivando y sustituyendo el sistema c.2:
c.3
U ( x , t ) = xx = -lor2 c.4
Por lo que para que la derivada sea negativa y por lo tanto que la ecuación diferencial sea estable se requiere que k > O . Y como V ( X , t ) + m cuando IIXll + m , entonces el estado de equilibrio es el origen, es decir x -+ O .
Segundo ejemplo
Sea el sistema:
X = -!a+ k r c.5 donde:
r es constante (función forzante de la ecuación diferencial)
Del cual se sabe que es estable si k > O , ya que su solución es x = Ce-b + r . Para demostrar la estabilidad, primero se hace una transformación para que sea posible aplicar el método. Utilizando la transformación y = x - r , el sistema se convierte en:
y = - @ c.6
El cual es un sistema similar al del primer ejemplo, por lo que basta que k > O para que c.6 sea estable. Y como y + O entonces por la trasformación x -+ r .
Tercer ejemplo.
Sea el sistema:
x = -k(t)x + k(t)r donde:
r es constante (función forzante de la ecuación diferencial)
c.7
Para demostrar la estabilidad, de igual forma se hace una transformación. Utilizando y = x - r como trasformación resulta el sistema:
j , = -k(t)y c.8
XI
Para comprobar la estabilidad se propone la siguiente función de Lyapunov
c.9
Derivando y sustituyendo el sistema c.8:
U(y, t) = yjJ = -k(t)yZ c.10
Por lo que para que la derivada sea negativa y por io tanto que la ecuación diferencial sea estable se requiere que k ( t ) > O . De igual forma que en el ejemplo anterior y -+ O entonces por la trasfonnación x 4 r .
Cuarto ejemplo
Como cuarto ejemplo sea el sistema:
x = -k(t)x + m(t) donde:
M no es constante (función forzante)
c.11
Para comprobar la estabilidad se asume que c.11 puede expresarse de la siguiente forma:
x = -k( t )x + k ( t ) r ( t ) + ?(t) c.12
Es decir que m(t) = k( t ) r ( t ) + ?(t)
En c. 12 si es posible demostrar la estabilidad fácilmente. Utilizando la siguiente transformación y = x - r , se obtiene que c. 12 se convierte en:
j J = -k(t)y c.13
Por lo que resulta en un sistema igual al del tercer ejemplo, por lo basta que k(t) > Opara que el sistema sea estable. Como y + O entonces por la trasformación x + r .
Como ejemplo numérico podemos mencionar el siguiente sistema:
x = -1OOx+ loo& sin(100t) +50 c.13
XI1
Este sistema por medio de identidades se puede expresar como:
c.14 ya tiene la forma de c.12 por lo que dicho sistema es estable y además tiende a sin(IOOt-"/$')+OS. Debe notarse que transformar c.11 a c.12 no siempre es una tarea sencilla.
Nótese de los ejemplos anteriores que la función forzante no es determinante en la estabilidad de la ecuación diferencial, y que además la condición para que dicha ecuación sea estable es k ( t ) > O . Por lo anterior la condición de estabilidad puede encontrarse fácilmente si se hace la función forzante igual a cero y se aplica el teorema de estabilidad de Lyapunov para determinar la condición de estabilidad.