SIP-14-BIS INSTITUTO POLITECNICO NACIONAL SECRETARlA DE INVESTIGACION Y POSGRADO ACTA DE REVISION DE TESIS En la Ciudad de Mexico siendo las 13:00 horas del dia 15 del mes de Agosto del 2011 se reunieron los miembros de la Comision Revisora de Tesis, designada por el Colegio de Profesores de Estudios de Posgrado e Investigation de CIITEC para examinar la tesis titulada: Analisis de marcha en pacientes con hemiplejia desde un punto de vista bio-robotico Presentada por el alumno: Correa Bautista Fanny Apellido paterno aspirante de: Apellido materno Nombre(s) Con registro: A 0 8 0 7 8 3 Maestria en Tecnologia Avanzada Despues de intercambiar opiniones los miembros de la Comision manifestaron APROBAR LA TESIS, en virtud de que satisface los requisites senalados por las disposiciones reglamentarias vigentes. LA COMISION REVISORA Dra. Dr. Fernand Alvarez Chavez V Dr. Gustavo Romero Martinez Dr. Sebastian/G)iaz de la Torfe PRESIDENTE DEL M. en C. Vice
Transcript
SIP-14-BIS
INSTITUTO POLITECNICO NACIONALSECRETARlA DE INVESTIGACION Y POSGRADO
ACTA DE REVISION DE TESIS
En la Ciudad de Mexico siendo las 13:00 horas del dia 15 del mes de
Agosto del 2011 se reunieron los miembros de la Comision Revisora de Tesis, designada
por el Colegio de Profesores de Estudios de Posgrado e Investigation de CIITEC
para examinar la tesis titulada:
Analisis de marcha en pacientes con hemiplejia desde un punto de vista bio-robotico
Presentada por el alumno:
Correa Bautista FannyApellido paterno
aspirante de:
Apellido materno Nombre(s)
Con registro: A 0 8 0 7 8 3
Maestria en Tecnologia Avanzada
Despues de intercambiar opiniones los miembros de la Comision manifestaron APROBAR LATESIS, en virtud de que satisface los requisites senalados por las disposiciones reglamentariasvigentes.
LA COMISION REVISORA
Dra.
Dr. Fernand Alvarez ChavezV
Dr. Gustavo Romero Martinez Dr. Sebastian/G)iaz de la Torfe
PRESIDENTE DEL
M. en C. Vice
INSTITUTO POLITÉCNICO NACIONAL
Centro de Investigación e Innovación Tecnológica
CIITEC
Tesis
“Análisis de marcha en pacientes con hemiplejia
desde un punto de vista Bio-robótico”
Que para obtener el grado de
Maestría en Tecnología Avanzada
Presenta
Ing. Fanny Correa Bautista
Directores:
Dra. Guadalupe González Díaz
Dr. Luis Iván Lugo-Villeda†
México, D.F., Septiembre 2011
Resumen
La marcha es una de las condiciones que denota la funcionalidad en las
personas y puede verse afectada por diversos factores como es el caso de las
enfermedades cerebro-vasculares y en caso particular la hemiplejia, cuyo grado de
afección dependerá del daño neurológico sufrido. De tal manera que para el
tratamiento y rehabilitación de marcha en personas con hemiplejia, es necesario
identificar y caracterizar el ciclo de marcha patológico ya que existen diversos
obstáculos en el diagnóstico y proceso de rehabilitación. Es necesario hacer un análisis
biomecánico que defina el desempeño articular y cartesiano de al menos las 4
estructuras óseas (pelvis, cadera, rodilla y tobillo) de la extremidad inferior derecha e
izquierda en los 3 planos anatómicos.
En este trabajo, se presenta una metodología para el análisis de marcha desde
un punto de vista bio-robótico, empleando una plataforma profesional de
caracterización de movimiento, sistema de videografía tridimensional del Centro de
Rehabilitación Infantil Teletón, Estado de México, con el cual se estudiaron a 8 sujetos:
3 personas que se asumen como sanas y 5 personas con diagnóstico de hemiplejia de
los cuales se obtuvieron parámetros cinemáticos y espacio-temporales. Se propone
una estrategia para la emisión de gráficas y un procedimiento de análisis, que describa
las condiciones clínicas del paciente. Se corroboran los procedimientos propuestos
para el grupo de personas en estudio. Cabe señalar que este tipo de análisis es
empleado para el diseño de una cadena cinemática útil en visualización 3D y diseño de
sistemas robóticos asistenciales. Se describen recomendaciones y perspectivas del
trabajo de investigación.
Abstract
The gait is one of the conditions that denote functionality of the human body,
which can be affected by many factors, such as diseases, and particularly, by
hemiplegy, whose level of repercussion depends upon the neurological damage
suffered. In order to provide treatment and gait rehabilitation for people with this
disease, it is necessary to identify and characterize the pathological walk cycle, and
there exist many obstacles to the diagnostic and rehabilitation process. A biomechanical
analysis of articular and Cartesian performance of at least the four bone structures
(pelvis, hip, knee and ankle) of both legs in the three anatomical planes is needed.
This work presents a methodology for gait analysis from a biomechanical
standpoint using a professional platform for characterization of the a three-dimensional
video system from the Teleton Infantile Rehabilitation Center in Estado de Mexico, with
which subjects were studied, 3 of them healthy, and 5 with a hemiplegy diagnosis, for
whom the kinematic spatial and temporal parameters were obtained. A strategy for the
generation of graphics and an analysis procedure that describes the patient’s clinical
condition is proposed and verified upon the study subjects. It is worth mentioning that
this type of analysis is employed for the design of a kinematic chain in which is useful
for 3D visualization and design of robotic assistant systems. Finally some
recommendations and perspectives from the research work are described.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Acrónimos
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
VII
LISTA DE ACRÓNIMOS
ACV – Accidente Cerebro Vascular
BLEEX - Berkeley Lower Extremity Exoskeleton
CRIT – Centro de Rehabilitación Infantil Teletón
EMG – Electromiografía
EVC – Enfermedad Vascular Cerebral
HAL - Hybrid Assistive Limb
OMS – Organización Mundial de la Salud
SNC – Sistema Nervioso Central
D-H – Denavit Hartenberg
LTC: Recta (Trocante-Cóndilo)
LPM: Recta (Peroné-Maleólo)
mTC: Pendiente de la recta LTC
mPM: Pendiente de la recta LPM
θFR: Amplitud angular de la rodilla
EA: Evaluación actual
EP: Evaluación previa
MCDP: Modelo Cinemático Directo de Posición
an - Distancia entre los ejes de las articulaciones
αn - Ángulo que, en un plano perpendicular a an, existe entre ambos ejes.
dn - Distancia entre las normales al eje de la articulación que quedan definidos por an-1 y
an.
Θn - Ángulo entre estas normales, medido en un plano perpendicular al eje.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
IX
Índice de figuras
Figura 1.1. Infarto isquémico……………………………………………………………
Figura 2.1. Regiones del cuerpo afectadas según la zona del cerebro dañada…
Figura 2.2. Tipos de sincinesias………………………………………………………
Figura 2.3. Marcha en barras paralelas………………………………………………
Figura 2.4. Modelo de exoesqueleto: a) HAL 3 y b) HAL 5…………………………
Figura 2.4. Modelo de exoesqueleto BLEEX…………………………………………
Figura 2.5. Modelo de exoesqueleto ROBOKNEE……………………………………
Figura 2.6. Modelo de LOKOMAT………………………………………………………
Figura 3.1. Planos del cuerpo humano en la posición anatómica estándar……….
Figura 3.2. Tres planos principales en el movimiento de la marcha………………
Figura 3.3. Rueda que representa el ciclo natural de la marcha……………………
Figura 3.4. Ciclo de la marcha humana normal……………………………………….
Figura 3.5. Parámetros medidos durante el ciclo de marcha humana normal…….
Figura 3.6. Cantidad relativa de tiempo empleado durante cada fase……………
Figura 3.7. Fases y sub-fases del ciclo de la marcha………………………………
Figura 3.8. Gráfica que representa la Flexo-Extensión de la Rodilla en el plano
sagital………………………………………………………………………
Figura 3.9. Diagrama de la propuesta metodológica para evaluación ……………
Figura 3.10. Ubicación de los marcadores en extremidad inferior………………….
Figura 3.11. Marcadores para detectar puntos anatómicos.………………………..
Figura 3.12. Colocación de marcadores……………………………………………….
2
26
29
30
43
44
44
45
56
58
59
60
60
62
63
64
72
80
81
81
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
X
Figura 3.13. Descripción de la plataforma para la caracterización del ciclo de
marcha…………………………………………………………………….
Figura 3.14. Recorrido a lo largo de la plataforma …………………………………
Figura 3.15. Descripción de marcadores para la caracterización de flexo-
extensión de rodilla identificadas por una cámara infrarroja en el
plano xz o plano sagital………………………………………………….
Figura 3.16. Procedimiento para el procesamiento de datos capturados…………
Figura 3.17. Diagrama de procedimiento para obtener gráficos de desempeño
articular durante evaluación del ciclo de marcha................................
Figura 3.18 Ciclo de marcha en el plano coronal de la extremidad inferior
derecha……………………………………………………………………
Figura 3.19 Ciclo de marcha en el plano sagital de la extremidad inferior
derecha……………………………………………………………………
Figura 3.20 Ciclo de marcha en el plano transversal de la extremidad inferior
derecha……………………………………………………………………
Figura 3.21 Ciclo de marcha en el plano coronal de la extremidad inferior
izquierda…………………………………………………………………..
Figura 3.22 de marcha en el plano sagital de la extremidad inferior izquierda….
Figura 3.23. Ciclo de marcha en el plano transversal de la extremidad inferior
izquierda…………………………………………………………..………
Figura 3.24. Relación de la biomecánica de la pelvis para una persona sana y un
paciente……………………………………………………………………
82
82
84
85
87
89
89
90
90
91
91
96
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XI
Figura 3.25. Relación de la biomecánica de la cadera, rodilla y tobillo para una
persona sana y un paciente. …………………………………………..
Figura 4.1. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). ………………………………………………….
Figura 4.2 Persona sana 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho) ………………………….
Figura 4.3. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ……………………………………………….
Figura 4.4. Persona sana 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………....................
Figura 4.5. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)……………………………
Figura 4.6. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………...
Figura 4.7. Persona sana 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………………….
Figura 4.8. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)………………………….
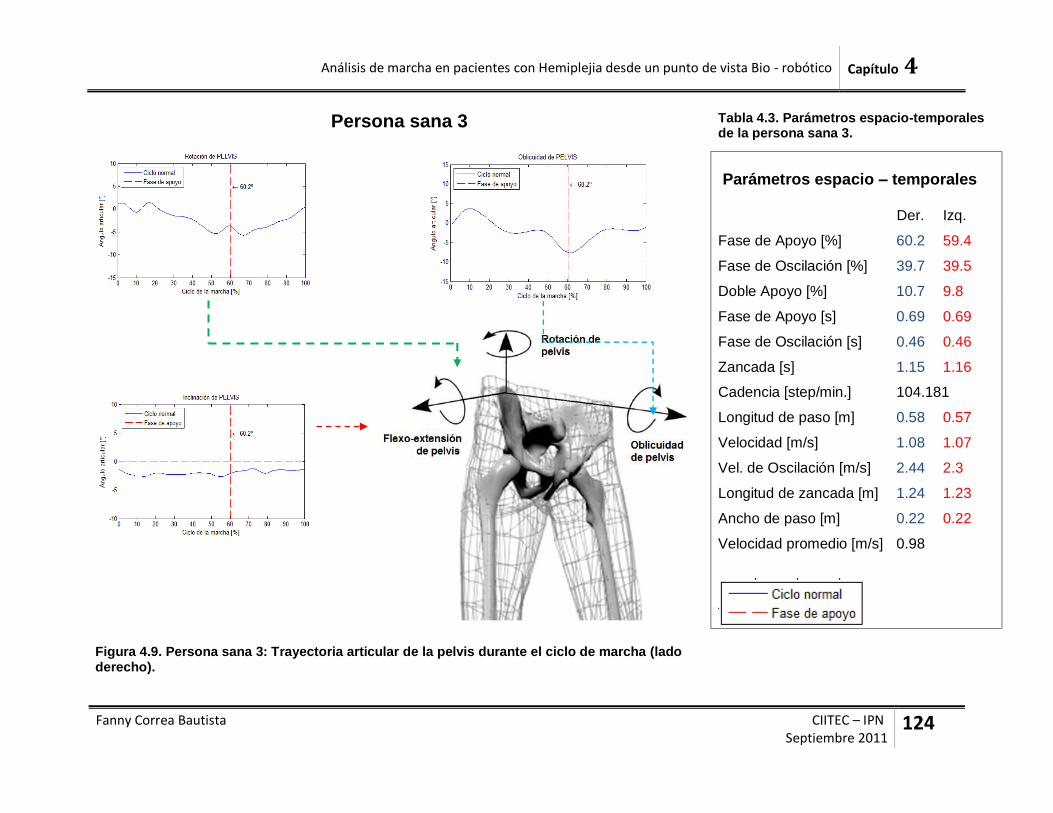
Figura 4.9. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)…………………………………………………..
Figura 4.10. Persona sana 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………...
97
116
117
118
119
120
121
122
123
124
125
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XII
Figura 4.11. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.12. Persona sana 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………………………
Figura 4.13. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………………………….
Figura 4.14. Paciente 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………..
Figura 4.15. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………………...
Figura 4.16. Paciente 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)………………………….
Figura 4.17. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………………………….
Figura 4.18. Paciente 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………..
Figura 4.19. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………..………
Figura 4.20. Paciente 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………………………
Figura 4.21. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………...………………
126
127
128
129
130
131
132
133
134
135
136
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XIII
Figura 4.22. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………..
Figura 4.23. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………..…………….…
Figura 4.24. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). …………………………
Figura 4.25. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). …………………………………………………
Figura 4.26. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………
Figura 4.27. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.28. Paciente 4: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). ……………………….
Figura 4.29. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). …………………………………………………
Figura 4.30. Paciente 5: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………
Figura 4.31. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.32. Paciente 5: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). …………………………
137
138
139
140
141
142
143
144
145
146
147
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XIV
Figura 4.33. Gráfica que representa la amplitud angular de la pelvis, cadera y
rodilla en el plano coronal (lado izquierdo y lado derecho)……….
Figura 4.34. Gráfica que representa la amplitud angular de la pelvis, cadera,
rodilla y tobillo en el plano sagital (lado izquierdo y lado derecho)…
Figura 4.35. Gráfica que representa la amplitud angular de la pelvis, cadera,
rodilla y tobillo en el plano transversal (lado izquierdo y lado
derecho)………………………………………………………………….
Figura 4.36 Cadencia experimentada en 8 sujetos de estudio durante el ciclo de
marcha…………………………………………………………………….
Figura 4.37 Longitud de paso experimentada en 8 sujetos de estudio durante el
ciclo de marcha (en ambas extremidades)……………………………
Figura 4.38. Longitud de zancada experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades)………………
Figura 4.39. Ancho de paso experimentada en 8 sujetos de estudio durante el
ciclo de marcha (en ambas extremidades)…………………………….
Figura 4.40 Subfase de doble apoyo experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades)………………
Figura 4.41. Fase de apoyo y fase de oscilación en los 8 sujetos evaluados……
Figura 4.42. Relación la velocidad promedio y la fase de apoyo de los 8 sujetos
evaluados…………………………………………………………………
Figura 5.1. Representación de los 3 segmentos de la extremidad inferior como
eslabones: a) Muslo, b) Pierna y c) Pie…………………………………
154
157
161
165
165
166
166
167
167
168
176
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XV
Figura 5.2. Cadena cinemática propuesta para las extremidades inferiores………
Figura 5.3. Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de
cadera para la extremidad derecha en el sujeto de estudio Sano 1…
Figura 5.4. Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de
cadera para la extremidad izquierda en el sujeto de estudio Sano 1
Figura 5.5. Cinemática de posición del marco fijo en la pelvis al marco base del
tobillo……………………………………………………………………..
Figura 5.6 Cinemática de posición del marco fijo en la pelvis al marco de
pronación-supinación del tobillo………………………………………
Figura 5.7 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión del tobillo……………………………………………………
Figura 5.8 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la rodilla………………………………………………….
Figura 5.9 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la cadera……………………………………………………
Figura 5.10 Cinemática de posición del marco fijo en la pelvis al marco de
aducción-abducción de la cadera……………………………………..
Figura 5.11 Cinemática de posición del marco fijo en la pelvis al marco base del
tobillo………………………………………………………………………
Figura 5.12 Cinemática de posición del marco fijo en la pelvis al marco de
pronación-supinación del tobillo…………………………………………
Figura 5.13 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
177
182
182
184
186
188
190
191
192
194
196
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVI
extensión del tobillo……………………………………………………….
Figura 5.14 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la rodilla……………………………………………………
Figura 5.15 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la cadera……………………………………………………
Figura 5.16 Cinemática de posición del marco fijo en la pelvis al marco de
aducción-abducción de la cadera………………………………………..
Figura E.1 Plataforma para la caracterización del ciclo de marcha………………
Figura F.1. Representación de un vector de coordenadas…………………………
Figura F.2. Cinemática Directa y Cinemática Inversa………………………………
Figura F.3. Ejemplo de Cadena Cinemática…………………………………………
Figura F.4. Longitud y torsión de un elemento de la cadena cinemática…………
Figura F.5. Distancia y ángulo entre los elementos de la cadena cinemática……
198
199
200
202
256
263
266
267
267
268
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVII
Índice de tablas Tabla 3.1. Descripción del movimiento articular durante el ciclo de la marcha. …
Tabla 3.2. Cinemática articular normal de la marcha…………………………………
Tabla 3.3. Descripción de marcadores y nomenclatura de pares ordenados
identificados por cámara infrarroja………………………………………
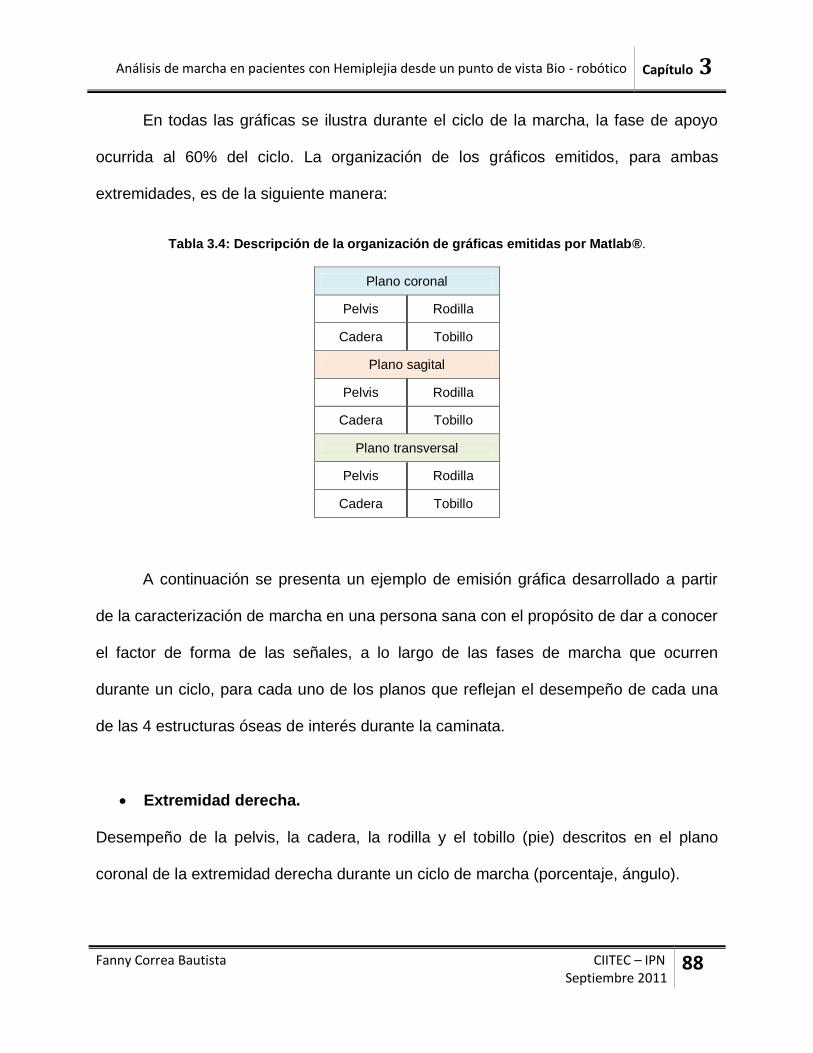
Tabla 3.4: Descripción de la organización de gráficas emitidas por Matlab®………
Tabla 3.5. Proyección de ángulos articulares sobre los planos anatómicos para la
pelvis……………………………………………………………………….
Tabla 3.6. Proyección de ángulos articulares sobre los planos anatómicos para la
cadera Tabla 3.7. Proyección de ángulos articulares sobre los planos
anatómicos para la rodilla………………………………………………
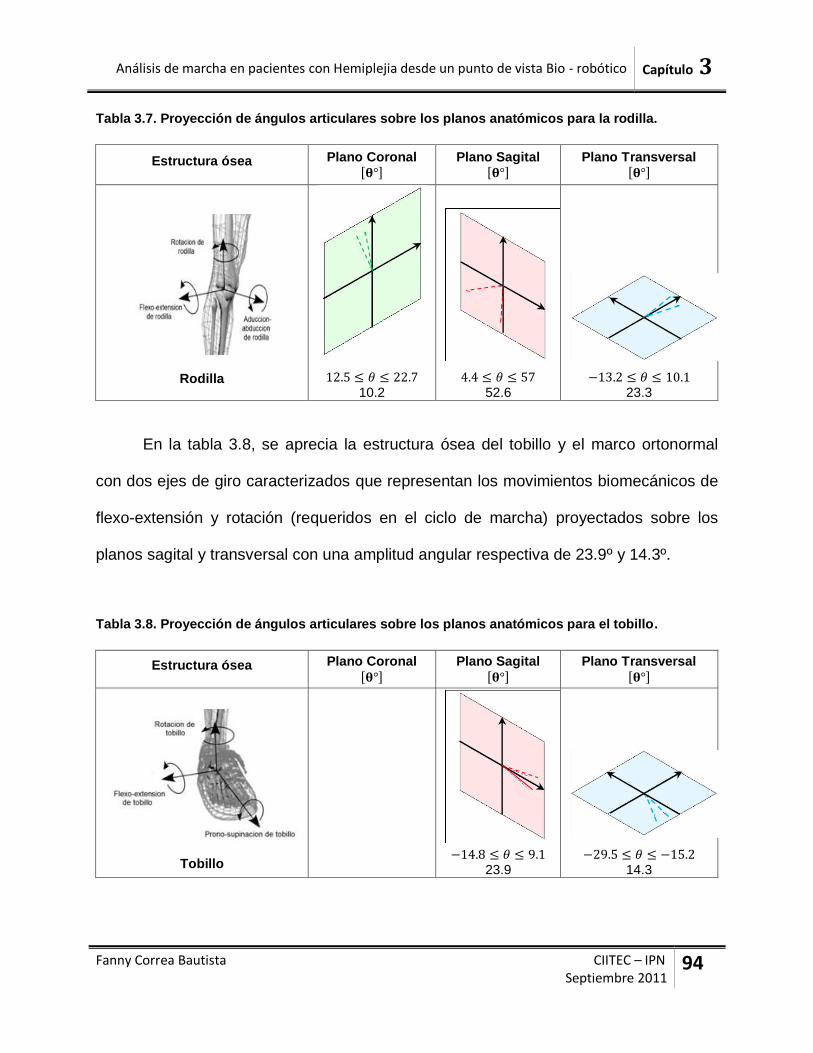
Tabla 3.8. Proyección de ángulos articulares sobre los planos anatómicos para el
tobillo………………………………………………………………………
Tabla 3.10. Parámetros espacio-temporales, cinemáticos. …………………………
Tabla 4.1. Parámetros espacio-temporales de la persona sana 1…………………
Tabla 4.2. Parámetros espacio-temporales de la persona sana 2…………………
Tabla 4.3. Parámetros espacio-temporales de la persona sana 3…………………
Tabla 4.4. Parámetros espacio-temporales del paciente 1…………………………
Tabla 4.5. Parámetros espacio-temporales del paciente 2…………………………
Tabla 4.6. Parámetros espacio-temporales del paciente 3…………………………
Tabla 4.7. Parámetros espacio-temporales del paciente 4…………………………
65
70
85
88
92
93
94
94
102
116
120
124
128
132
136
140
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVIII
Tabla 4.8. Parámetros espacio-temporales del paciente 5…………………………
Tabla 4.9. Rango de movilidad articular de la extremidad inferior derecha en los 3
planos……………………………………………………………………………………..
Tabla 4.10. Rango de movilidad articular de la extremidad inferior izquierda en los
3 planos………………………………………………………………………………..
144
148
150
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
Apéndice E: Equipo de caracterización de la marcha en el CRIT Estado de
México…………………………………………………………………
Apéndice F: Conceptos de robótica…………………………………………………
205
205
208
211
227
235
247
251
255
263
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
1
Capítulo 1 Introducción
1.1. Antecedentes
El estilo de vida, actualmente se caracteriza por una alimentación deficiente, o
excesiva, falta de actividad física y sobre todo estrés crónico. Se vive en un ambiente
agresivo que pone a prueba la regulación del organismo, dando como resultante final
una situación de desgaste físico y emocional. Se exige demasiado y en áreas diversas
como: familiar, laboral, de pareja y social [1].
Estudios recientes, indican que las personas con estrés emocional tienden a
desarrollar patologías más fácilmente. Esto, es debido a que el estrés es una respuesta
natural de emergencia del organismo. Así, el estilo de vida, condiciona ahora e incluso
determina riesgos y daños que originan enfermedades crónico-degenerativas y muertes
prematuras [2].
La Enfermedad Vascular Cerebral (EVC) se considera uno de los principales
daños ocasionados por la hipertensión arterial, la diabetes, el sedentarismo, el estrés,
el tabaquismo, el colesterol, entre otros [3]. Fisiológicamente un accidente
cerebrovascular se define como la muerte repentina de las células del cerebro, esto es,
el infarto puede ser isquémico o hemorrágico, como se muestra en la Figura 1.1, es
decir, la obstrucción o ruptura de una arteria que impide la irrigación sanguínea al
cerebro respectivamente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
2
Figura 1.1. Infarto isquémico [3].
La Organización Mundial de la Salud (OMS) define la Enfermedad Vascular
Cerebral (EVC) como: el “síndrome clínico caracterizado por el rápido desarrollo de
síntomas y/o signos correspondientes usualmente a afección nuerológica focal, y a
veces global, que persisten más de 24 horas o conducen a la muerte, sin otra causa
aparente que un origen vascular” [4]. Los pacientes que sobreviven al infarto, enfrentan
incapacidades permanentes, como dificultades en el movimiento, el equilibrio, la
coordinación, trastornos para caminar, tragar, hablar, parálisis de un lado del cuerpo,
problemas de visión, control de esfínteres, entre otros [5].
Cabe señalar que cuando una parte del cerebro no recibe suficiente irrigación
sanguínea, se daña de forma irreversible y no puede recuperarse al 100 %, por lo cual
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
3
no existe una curación, para las hemiplejías producidas por un accidente
cerebrovascular, a las condiciones de salud iniciales. Sin embargo, gracias a la
plasticidad cerebral, adaptación que tiene el sistema nervioso para minimizar los
efectos de las lesiones estructurales y funcionales, es posible que pueda controlar los
músculos inutilizados con la parte del cerebro no dañada.
La marcha en una persona hemipléjica, que la discapacita total o parcialmente,
presenta básicamente las siguientes características que se describen en el capítulo 2.
Disminución de la velocidad de la marcha
Control defectuoso de la extremidad afectada con disminución del tiempo de
apoyo sobre la misma durante la fase de apoyo.
Aumento del tiempo de apoyo sobre la extremidad sana y del tiempo de doble
apoyo, o sub-fase bipodal.
Menor longitud del paso.
Disminución del arco de movimiento articular de la extremidad afecta (limitación
de amplitud angular).
Existe un incremento en la incidencia de enfermedades cerebro-vasculares,
tanto que hoy en día constituye la tercera causa de mortalidad, la primera causa de
invalidez o incapacidad en los adultos y la segunda de demencia. La incidencia se sitúa
en torno a los 200 nuevos casos por 100.000 habitantes y tiene prevalencia de entre
500 y 800 casos por cada 100.000 habitantes al año.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
4
Entre los pacientes que sobreviven, un 10% precisará cuidados continuos, un
40% necesitará algún tipo de ayuda, otro 40% presentará secuelas permanentes y tan
solo un 10% podrá volver a sus actividades cotidianas con normalidad. Los factores
relacionados con los hábitos y estilo de vida, dan como resultado inevitable un
incremento de accidentes cerebrovasculares en los próximos años [6].
Para el 2007 se reportaron en México, 43 000 nuevos casos de personas con
EVC, donde del total de pacientes que presentan un cuadro de EVC, un 10% tienen
una recuperación íntegra en los primeros 45 días, un 80% requieren de rehabilitación
siempre y cuando no se encuentren afectadas la comprensión y la memoria ya que se
estima que un 30% aproximadamente desarrollan demencia en los siguientes meses
[7].
Cierto es que para la rehabilitación de personas con hemiplejía entre otros daños
neurológicos, existen diversos cuidados fisioterapéuticos, de enfermería y también de
terapia ocupacional que contribuye a que los pacientes comiencen a valerse por sí
mismos. Sin embargo, la recuperación no se logra en un 100% y surge como un
instrumento poderoso para la autonomía personal y la interacción social de la persona
con alguna discapacidad la llamada “Tecnología de la Rehabilitación” o “Tecnología
Asistencial” que es la tecnología de apoyo que evita, neutraliza, compensa o mitiga las
limitaciones funcionales de las personas y de esta manera pueda acceder a su entorno
social [9]. No olvidemos que la movilidad personal es una actividad funcional para
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
5
cualquier individuo, su calidad de vida, su autonomía e independencia dependen de
tener un buen nivel de desempeño.
La medicina moderna se ha beneficiado de los avances tecnológicos para la
facilitación y profundización en el ámbito de diagnóstico y esfera terapéutica. Es
necesario dar respuestas a las demandas sociales con una perspectiva científica y
aplicar conforme a los resultados de las investigaciones científico-tecnológicas, todos
aquellos modelos que mayor beneficio aporten a los pacientes, en este caso, los
hemipléjicos, representa uno de los desórdenes neurológicos que constituye la
principal causa de discapacidad y necesita abordarse desde el punto de vista de la
rehabilitación física y ocupacional.
Es importante mencionar que los avances experimentados en robótica desde
sus inicios han permitido ampliar sus campos de aplicación a lo que hoy se conoce
como Ayuda Técnica para personas con alguna discapacidad, ya que puede dar
soporte a muy diversos problemas de disminución física, esto debido a la relación
hombre-máquina desde el punto de vista funcional, pues si se analizan las diferentes
partes de una persona y un robot se tiene: cerebro-computador; cuerpo-estructura
mecánica; músculos-motores; sentidos-sensores y sistemas de percepción. Así, ya sea
de forma global, utilizando un sistema robótico completo, o bien, disponiendo de
solamente simples mecanismos se pueden diseñar y construir sistemas de ayuda como
han sido las órtesis y prótesis como estructuras robóticas pasivas.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
6
Estas primeras aplicaciones de la robótica en el campo de la discapacidad,
datan de los años 70 con la construcción de dispositivos protésicos y ortésicos, como
herramienta de ayuda, utilizándolo como soporte externo bajo el control del propio
usuario [8].
De ahí que surge también el concepto de Robótica Asistencial que se debe
entender como el área de la Robótica aplicada que se especializa en el diseño y
desarrollo de equipos o dispositivos que interactúan directamente con al individuo para
su rehabilitación que para el caso de las personas con deficiencia en la marcha, se
debe a la pérdida de capacidad en la movilidad de sus extremidades inferiores (pierna
izquierda o derecha) [9].
Lo anterior, no es algo nuevo y el hecho de conseguir que un ser humano pueda
controlar una máquina estando dentro de una estructura robótica con solo moverse de
manera natural, es algo que llevan impulsando los expertos en robótica desde hace
tiempo y surgen los llamados exoesqueletos, mecanismos montables y antropomorfos
que responden a los movimientos del ser humano.
Exoesqueleto, es un armazón ergonómico, en el que la persona u operador se
instala y acopla la estructura a su cuerpo, y a partir de ese momento, comienza a
responder a todos los movimientos que realiza el usuario, y no solamente imita o
reproduce su recorrido o velocidad, sino también amplifica la fuerza de manera
proporcional a la que se pide de manera intuitiva. De esta manera, el control de estas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
7
máquinas se hace tan natural que prácticamente se convierten en extensiones del
cuerpo, pudiendo realizar acciones que no sólo requieren de potencia, sino también de
precisión [10].
Para el diseño de dispositivos robóticos asistenciales, como es el caso de un
exoesqueleto, la caracterización de movimientos, la emisión de gráficas resultantes y el
análisis de la marcha a partir del desempeño articular en las diferentes estructuras
óseas permiten desde planificar los movimientos pertinentes y reproducirlos con la
aplicación de una ley de control de movimiento y fuerza simultáneos.
1.2. Breve descripción del estado del arte
Una revisión de los trabajos más recientes de neurorehabilitación con robótica
asistencial a partir de la caracterización y análisis de marcha en pacientes con
discapacidad de movimiento en miembros inferiores son descritos en la Tabla 1.1, y
que permiten garantizar las contribuciones del presente trabajo de investigación y
desarrollo.
Tabla 1.1 Breve descripción del estado del arte en marcha y neurorehabilitación.
¿Quién/Dónde? ¿Qué? ¿Cómo?
1 USA, 2008
Universidad de Arizona, Universidad Politécnica de Hong Kong, [18].
Rehabilitación a base de repeticiones T-
wrex (Therapy Wilmington Robotic
Exoskeleton)
El sistema retoma la tarea de aprendizaje y considera la plasticidad cerebral como mecanismo de recuperación.
2 Fundación Italiana
“Salvatore Maugeri”,
[19].
Dispositivo Robótico Mime (Exo) para el
brazo, de parámetros normalizados de
control de fuerza para medir los cambios
de la interacción hombre-máquina.
Medición de los cambios en la
dinámica de movimiento durante la
neurorehabilitación con ayuda de
un robot.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
8
3 Agencia para la ciencia,
tecnología e
investigación, Singapore
2010, [20].
Evaluación de la capacidad motriz en
miembros superior en personas
hemiparésicas
Se realiza mediante EEG basado en
tratamiento de imágenes con una
interfaz cerebro-computadora
4 Colegio de Ingeniería y
Tecnología Galgotias,
India, 2010, [21].
Modelo matemático de la dinámica en
una pierna Bio-robótica como dispositivo
asistencial (protesis).
Formulación de Euler-Lagrange:
Dinámicas inercial, Coriolis,
centrípetas, gravedad, y fricción.
5 Lidan Fang, Xiaohong Jia,
and Rencheng Wang
Universidad Tsinghua,
China, 2007, [22].
Caracterización de ciclo de marcha de
pacientes con una amputación
Mediante un sistema de telemetría
EMG y combinado con las
ecuaciones de Euler-Lagrange
6 M. Coscia, G. Galardi, V. Monaco, S. Bagnato, S.
Micera. Italia, 2010 [23].
Ejercitador NEUROBike Rehabilitación que se da a los
pacientes con ictus, o algún otro
trastorno cerebro -vascular.
7 Sang-Hun Pyo, Abdullah
Özer and Jungwon Yoon
Universidad Nacional,
Jinju, Korea, 2010, [24].
El diseño de una órtesis de la rodilla
diseñada para la rehabilitación de
personas con dificultad motriz.
Esto se logra mediante dos
actuadores que facilitan el
movimiento de la pierna
8 Junghwa Hong, Gwang-
Moon Eom, and Byung
Kyu Park. Korea, 2004,
[25].
Se desarrolló una órtesis como cojín de
asiento para prevenir úlcera de decúbito
en el que se requiere distribuir
uniformemente la presión.
Esta ortesis se logro gracias a el
estudio de las características
individuales de cada persona
9 Sami S. AlAbdulwahab
Arabia Saudita, 2010, [26]
Se obtuvieron resultados del programa
“ES: Estimulación Eléctrica” el cual
resultaron ser positivos
El programa “ES” es un programa
que se basa en la estimulación de
los músculos espásticos de niños
durante 15 días
10 Meng Zhang, Xuejun Li
Changchun University,
2010, [27]
El 4-DOF es un robot pasivo de miembro
inferior el cual tiene 4 grados de libertad,
utilizado para la rehabilitación
Robot que interpreta la velocidad,
esfuerzo, movilidad, entre otras
cosas para rehabilitación
11 BW Chan, K.K. Tan, K.Z.
Tang
Singapore, 2008, [28]
Se desarrollo un sistema de
fisioterapia inteligente utilizando un
diseño compacto reconfigurable input
output (cRIO) y sistema de LabVIEW de
National Instruments
(NI)
Este sistema portátil hace uso del
control de la computadora y
programación, es capaz de
proporcionar un mayor nivel de
seguridad, inteligencia, comodidad,
personalización y portabilidad
además de mejorar la
interacción hombre-maquina
12 Sistema de
organización del
módulo set
(SimMechanics)
Shenyang University of
Technology, China, 2008,
[29]
Rehabilitación con el
robot MACCEPA (ajustable
mecánicamente) con la estructura de
articulaciones flexibles.
Es un dispositivo de rehabilitación
construido y controlado por
matlab/simulink.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
9
13 Qiuhao Zhang,
Kechao Tian,
Hongche Guo
Shenyang University of
Technology, China, 2009,
[30]
Se describe el diseño y evaluación
de un exoesqueleto de las
extremidades inferiores de asistencia
pasiva basada en omnidireccionales, de
nombre MACCEPA
Se diseño una serie de
experimentos y pruebas que
llevaron a un mejor exoesqueleto,
brinda un menor esfuerzo y menor
consumo de energía al momento de
realizar un movimiento
14 Luis I. Lugo–Villeda,
Antonio Frisoli, Fanny
Correa Bautista, Vicente
Parra–Vega and Massimo
Bergamasco. México e
Italia, 2008, [31].
Dispositivo biomecánico para el
tratamiento conservador del pie
equinovaro aducto congénito.
Análisis, diseño y construcción de un dispositivo biomecánico para corregir la deformación del pie equinovaro, el cual sustituye el tratamiento con yesos.
15 Yinpeng Chen, Nicole
Lehrer, Hari Sundaram,
Thanassis Rikakis
Universidad de Arizona,
2010, [32]
Se describen, los análisis de terapias a
pacientes con ictus, y ofrece una opción
diseñada para encontrar la mejor manera
de tratar a estos pacientes para su
rehabilitación. Se presenta un sistema
adaptativo de rehabilitación combinando
a los pacientes con un equipo de
rehabilitación multimodal y entorno
híbridos.
Este estudio se logro mediante el
análisis de terapias de
rehabilitación para pacientes con
ictus.
16 Junghyeon Choi, Jongman
Cho. Inje University,
Korea, 2007, [33].
Este artículo describe un dispositivo de
rehabilitación desarrollado para
reemplazar un tobillo convencional
17 Ann M. Simon, Brian M.
Kelly, and Daniel P. Ferris
University of Michigan,
USA, 2009, [34].
Sistema de rehabilitación a pacientes con
hemiparesia, mediante un mecanismo
robótico para extremidad inferior
Se logro esto mediante un
experimento que se aplico a varios
pacientes con dicha enfermedad y
después registrando sus resultados
18 Rodrigo Alvarado, Isaac
Chairez, Alejandro García,
Alberto Luviano-Juárez,
Adriana Rivera, Alfredo
Rodríguez, and Neftalí
González. CINVESTAV,
México, 2010, [35]
Diseño de una plataforma para
evaluación de la biomecánica humana, la
cual tiene la ventaja de ser inalámbrica
Es el diseño de una plataforma de
análisis biomecánico de manera
inalámbrica, monitoreo de las
señales pertinentes y que éstas nos
permiten analizar la efectividad
alcanzada por la terapia
19 Shohei Oda, Noboru
Okuyama. Satoshi
Komada, and Junji Hirai
Japón, 2006, [36].
Equipo de rehabilitación diseñado para la
mejor optimización en el cuerpo con
menor esfuerzo
20 En la Universidad de
Michigan. 2009, [37].
Sus investigaciones se centran en un exo- esqueleto para el tobillo debido a que a resultado ser de gran ayuda a las personas con lesiones o con discapacidades para caminar
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
10
1.3. Planteamiento del problema
Para el tratamiento de la persona que padece hemiplejia, uno de los grandes
retos a enfrentar es rehabilitar y corregir el proceso de su marcha. Generalmente existe
un ciclo de marcha patológico, que consiste en una mala alineación y alteración en su
tono muscular, ya sea disminuido o aumentado.
Para conocer las características de dicho patrón, es necesario realizar un
análisis de marcha que se basa en la comparación de medidas que se derivan del
análisis de la cinemática, cinética y fisiología del aparato locomotor los cuales darán
como resultado una serie de parámetros que son fundamentales para su estudio desde
el punto de vista robótico, de tal manera que la marcha patológica se pueda
caracterizar [13].
Una caracterización confiable, emisión de respuestas del desempeño articular y
cartesiano, y el análisis de marcha; no solo responden a un adecuado diagnóstico
clínico del paciente, también contribuyen en la planificación de la fisioterapia y la
terapia ocupacional, y en el diseño de sistemas robóticos asistenciales del tipo
exoesqueleto.
El problema a resolver es descrito a partir de las siguientes preguntas:
¿Las tecnologías empleadas actualmente para la caracterización de marcha,
basadas en seguimiento de flujo óptico, garantizan certidumbre con los
procedimientos tecnológicos y algoritmos computacionales empleados?
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
11
¿La automatización en la emisión de gráficas de caracterización articular y
cartesiana del ciclo de marcha contribuyen en el diagnóstico clínico?
¿El análisis de marcha de las diferentes estructuras óseas a diferentes planos
anatómicos permite una fidedigna toma de decisiones para construir la rutina de
fisioterapia y terapia ocupacional?
¿La caracterización y el análisis del ciclo de marcha facilitan el diseño de un
sistema robótico asistencial?
1.4. Solución propuesta
Para responder a las preguntas planteadas como enunciado del problema se
realizó lo siguiente:
Proponer una metodología orientada al diagnóstico y rehabilitación en miembros
inferiores de pacientes hemipléjicos, que considera la selección de pacientes, la
caracterización del ciclo de marcha, el análisis de marcha, la cinemática de
marcha bípeda, el diagnóstico (toma de decisiones médicas), y las condiciones
de rehabilitación.
La automatización por programación del proceso de emisión gráfica para la toma
de decisiones y diagnóstico clínico del paciente.
La evaluación experimental con sujetos de marcha clínicamente saludables y
patológicos para corroborar la metodología propuesta.
Un principio para el diseño de cadenas cinemáticas descritas a partir del análisis
de marcha en planos anatómicos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
12
La obtención del modelo cinemático directo de posición para un sistema de 13
marcos ortonormales y 10 entradas articulares para describir el comportamiento
de marcha en el espacio cartesiano, útil para el diseño de sistemas
exoesqueléticos.
1.5. Objetivos
1.5.1 Objetivo general
Proponer una metodología orientada al diagnóstico y rehabilitación en miembros
inferiores de pacientes hemipléjicos, que considere la selección de pacientes, la
caracterización del ciclo de marcha, el análisis de marcha, la cinemática de marcha
bípeda, el diagnóstico (toma de decisiones médicas), y las condiciones de
rehabilitación; y que sea útil para el diseño de una cadena cinemática que permita la
base de construcción de sistemas robóticos asistenciales del tipo exoesqueleto.
1.5.2 Objetivos específicos
1. Elaborar un protocolo de investigación para accesar a instituciones del sector
salud en el área de rehabilitación física.
2. Hacer una selección de pacientes que sean candidatos para analizar el proceso
de su marcha de acuerdo a criterios de inclusión y exclusión específicos.
3. Estudio de campo para conocer clínicamente cuáles son las características de
la marcha en pacientes con hemiplejia.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
13
4. Ingresar un protocolo de investigación para el Centro de Rehabilitación Infantil
del Estado de México para la realización del análisis de marcha a pacientes
externos seleccionados según el punto anterior.
5. Realizar el análisis de marcha de acuerdo a un protocolo de estudio clínico, en
personas con marcha normal y personas hemipléjicas para establecer las
diferencias entre los respectivos patrones de marcha y obtener parámetros
espacio-temporales, cinéticos y cinemáticos.
6. Realizar el análisis biomecánico de la marcha en pacientes con hemiplejia y
personas sanas para determinar cuáles son las partes o regiones del cuerpo
que están trabajando de manera deficiente con base a los resultados obtenidos
del análisis de marcha.
7. Hacer un análisis cinemático de un ciclo de marcha patológico.
8. Hacer simulaciones numéricas cinemáticas en el espacio articular y cartesiano.
9. Proponer una cadena cinemática, útil en el diseño mecánico del exoesqueleto
de parte baja para las personas con hemiplejia.
1.6. Justificación
La EVC figura entre las primeras causas de morbilidad y mortalidad a nivel
mundial.
La hemiplejia es una secuela inhabilitante, resultado de una EVC.
Se presenta en personas que van desde los 30 años hasta personas adultas
mayores.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
14
Genera gastos médicos elevados para la familia del paciente por el cuidado de
un paciente con EVC.
Las EVC oscilan entre los 200 nuevos casos, aproximadamente, por cada
100,000 habitantes cada año y la prevalencia anual se estima entre 4,012 y
7,100 por cada 100,000 habitantes.
El 80% del total de las EVC corresponden a infarto cerebral isquémico.
El 20% restante está integrado por Hemorragia Cerebral o Subaracnoidea.
Sexta causa de muerte en general en el 2001 en México con 25731 casos.
Cuarta causa de muerte en México en el 2003
Sexta causa de muerte en el 2005 con 26 892 casos [16]
Limitados procedimientos de caracterización y análisis de marcha bípeda.
Tecnología nacional escaza a los estándares anatómicos de pacientes
mexicanos.
La rehabilitación de la marcha y las extremidades inferiores se basan
principalmente en fisioterapia y ejercicios musculares. Sin embargo, el uso de los
robots mejora los procedimientos de rehabilitación permitiendo que ésta sea de mayor
calidad así como el aumento de motivación en el paciente al sentirse más
independiente.
Sin embargo, aunque la tecnología para la rehabilitación es de gran ayuda, los
sistemas robóticos en esta área siguen siendo muy pocos. Se han abierto varias líneas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
15
de investigación en robótica para el diagnóstico y la rehabilitación de la marcha, pero
pocas han tenido éxito y ninguna es portable, lo cual limita mucho la aplicación real en
los pacientes.
1.7. Contribuciones
Las contribuciones de éste trabajo de tesis para adquirir el grado académico de
Maestría en Tecnología Avanzada son:
1. Protocolo de investigación para las instituciones de salud en el área de
rehabilitación física involucradas en este trabajo de investigación (IMSS y CRIT,
Estado de México).
2. Análisis de marcha realizado a personas con patrones de marcha normal y
patológico respectivamente.
3. Obtención de parámetros espacio-temporales de cada persona seleccionada.
4. Análisis de datos espacio-temporales y obtención de gráficas características de
la marcha patológica y sana respectivamente.
5. Desarrollo del modelo cinemático con base en previo análisis biomecánico como
aplicación de la robótica en el ámbito de la salud.
6. Desarrollo de una metodología que integra procedimientos para lograr eficaz
diagnóstico y rehabilitación de pacientes con hemiplejia.
7. Desarrollo de software para la emisión automática de graficas en el espacio
articular y cartesiano, con beneficio en lograr eficacia en el diagnóstico.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
16
1.8. Organización
A continuación se describe brevemente el contenido del presente trabajo de
tesis:
En el Capítulo 2, se presentan los antecedentes de la robótica asistencial con
aplicación en el tratamiento de pacientes con hemiplejia, el propósito constituye las
bases y fundamentos médicos que dan origen a la hemiplejia y su clasificación de
acuerdo la región corporal afectada, como consecuencia de un funcionamiento anormal
en el sistema nervioso central entre otras patologías cerebrovasculares.
En el Capítulo 3, se presentan los procedimientos propuestos para lograr un
eficaz análisis de marcha en pacientes hemipléjicos, en el que se involucran
movimientos musculo-esqueléticos que son analizados respecto a 3 planos anatómicos
en los que se divide el cuerpo humano. Se hace un exhaustivo estudio de las fases y
sub-fases en las que se divide el ciclo de marcha, así como de los parámetros espacio-
temporales que servirán para describir la cinemática tridimensional de la pelvis, cadera,
rodilla y tobillo durante el ciclo de la marcha y así determinar una propuesta
metodológica como herramienta de diagnóstico útil en la detección de las alteraciones
de movimiento en la marcha, y determinar el tratamiento adecuado para su corrección.
En el Capítulo 4 se presentan los resultados experimentales del análisis de
marcha bípeda de acuerdo a la metodología propuesta, se describe la plataforma de
evaluación empleada para la caracterización del ciclo y fases de marcha en 8 sujetos
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
17
de estudio, se dan a conocer las características antropométricas y la caracterización
de marcha con base en gráficos descriptivas del factor de forma de las señales
articulares para flexo-extensión (pelvis, cadera, rodilla y tobillo), rotación (pelvis, cadera
y rodilla), progresión del pie, oblicuidad de pelvis, aducción-abducción de cadera, varo-
valgo de rodilla, parámetros espacio-temporales del ciclo y fases de caminata; todo ello
referido a los planos coronal, sagital y transversal.
En el Capítulo 5, y con el propósito de mecanismo de rehabilitación se propone,
la cadena cinemática de un dispositivo exoesquelético que motiva la asistencia en la
aducción-abducción de cadera, la pronación-supinación de pie y la flexo-extensión de
cadera, rodilla y tobillo de ambas extremidades; elementos que influyen en la
rehabilitación del resto de las articulaciones caracterizadas. De la cadena propuesta, y
a partir de los parámetros Denavit-Hartenberg y matrices elementales para
transformaciones homogéneas se calculan las ecuaciones de la cinemática directa de
posición de cada articulación, útiles en la planificación de movimiento del exoesqueleto
final empleado.
1.9. Referencias
[1]. Sandín, Bonifacio. “El estrés: un análisis basado en el papel de los factores
sociales”. Revista Internacional de Psicologìa Clínica y de la Salud. 2003, Vol. 3, Nº
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
51
[23]. Lünenburger, Colombo and Riener. Biofeedback for robotic gait rehabilitation.
Journal of NeuroEngineering and Rehabilitation. January, 2007.
[24]. Conor James Walsh. Biomimetic Design of an Under-Actuated Leg Exoskeleton
For Load-Carrying Augmentation. B.A.I., B.A. Mechanical and Manufacturing
Engineering (2003).
[25]. Dellon, B. Matsuoka, Y. Prosthetics, exoskeletons, and rehabilitation. IEEE
Digital Library. April 2007. ISSN: 1070-9932
[26]. Sinkka H. Peurala. “Rehabilitation of Gait in Chronic Stroke Patients”.
Departament of Neurology, University of Kuopo. Doctoral dissertation. Kuopo,
2005. ISBN: 951–781–366–X
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
53
Capítulo 3 Análisis de Marcha en
Pacientes con Hemiplejia
3.1 Introducción
El conocimiento de la locomoción humana normal es la base del tratamiento
sistemático y del manejo de la marcha patológica, especialmente cuando se usan
prótesis y órtesis. En capítulo anterior, se hizo evidente la importancia que tiene el
apoyo de la biomecánica para el diseño de dispositivos como las órtesis activas, sobre
todo en las etapas avanzadas de desarrollo. No obstante, para el tratamiento y
diagnóstico preciso de patologías en las que está involucrado el movimiento de la
marcha humana como la Hemiplejía es imprescindible hacer un análisis biomecánico.
En este capítulo se presenta una descripción de la marcha bípeda o marcha
humana en condiciones normales (no patológicas) en el que se involucran movimientos
musculo-esqueléticos que son analizados respecto a los 3 planos anatómicos en los
que se divide el cuerpo humano: plano coronal, plano sagital y plano transversal, en
cada una de las regiones articulares que conforman las extremidades inferiores del
cuerpo. Se ha de hacer un exhausto estudio de las fases y sub-fases en las que se
divide el ciclo de marcha, así como de los parámetros espacio-temporales que servirán
para describir la cinemática tridimensional de la pelvis, cadera, rodilla y tobillo durante
el ciclo de la marcha y así determinar una propuesta metodológica como herramienta
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
54
de diagnóstico para detectar las alteraciones de movimiento en la marcha y determinar
el tratamiento adecuado para su corrección.
3.2 La marcha humana
La marcha humana es un sistema de locomoción con una característica
exclusiva de la especie: el desplazamiento del peso corporal desde un punto a otro se
realiza de forma bípeda. Consta de una serie de movimientos rítmicos sucesivos y
alternantes de las extremidades inferiores, las cuales contactan con la superficie de
desplazamiento [1].
En su descripción se debe tener en cuenta, todos y cada uno de los factores que
acontecen para su consecución, tales como los requerimientos energéticos, fuerzas de
reacción del suelo y los movimientos musculo-esqueléticos ya que es el resultado de la
acción coordinada de diversos sistemas musculares.
El hombre, por su condición bípeda, utiliza principalmente el sistema muscular
relativo a la cintura pélvica y miembros inferiores; y con relación a la cintura escapular,
tronco y los miembros superiores también contribuyen a la perfección del movimiento.
Sin embargo, determinados procesos neurológicos modifican las características de la
marcha normal como consecuencia de uno de los dos aspectos relevantes siguientes
[2]:
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
55
a) Alteración de la fuerza de los músculos que intervienen.
b) Coordinación que debe existir entre los músculos durante el movimiento.
Desde un punto de vista clínico, en este trabajo de investigación, es de interés
conocer el desempeño en la marcha humana normal con el fin de contrastarlo con la
marcha humana patológica, como consecuencia derivada del desorden de alguno de
los sistemas que integran la marcha, descritos previamente. El estudio comparativo
permitirá contribuir en un procedimiento para el análisis biomecánico y con ello modelar
la marcha en los pacientes que han sufrido un accidente cerebrovascular (ACV) y como
secuela tienen Hemiplejia [1].
3.2.1. Biomecánica de la marcha humana normal
Un diagrama de los tres planos primarios del cuerpo humano se muestra en la
Figura 3.1, y corresponden a los planos sagital, coronal (o frontal) y transversal. Con
propósitos de análisis de marcha, muchos autores enfatizan solo el plano sagital
ignorando los otros dos, ya que es probablemente uno de los más importantes, sin
embargo, diversos movimientos toman lugar en ciertas patologías donde otro plano
podría proporcionar información muy útil [3].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
56
Figura 3.1. Planos del cuerpo humano en la posición anatómica estándar [3].
Las proyecciones por separado podrían esquematizarse como en la Figura 3.2
con los parámetros expresados en un sistema de coordenadas.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
57
Figura 3.2. Tres planos principales en el movimiento de la marcha [3].
El acto de caminar requiere de las siguientes condiciones:
1. Movimiento periódico de cada pie de una posición de soporte a la siguiente.
2. Suficiente fuerza de reacción, aplicada a través del pie, para soportar al
cuerpo.
Estos dos elementos son necesarios para que ocurra un ciclo de marcha bípeda,
no importa cómo o qué tan alterado esté el ciclo (condiciones de una patología). El
movimiento periódico de la extremidad inferior es la esencia del ciclo natural de la
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
58
marcha humana. Se ilustra en la Figura 3.3 el movimiento de una rueda que va de
izquierda a derecha. La posición en la que primero vemos la rueda en donde el punto
inicial se indica con la línea vertical. Por convención el inicio es en 0%, cuando la rueda
comienza a girar lo hace en el sentido de las agujas del reloj, de izquierda a derecha,
en 20% la rueda ha girado 72°, así por cada 20% habrá girado 72° hasta completar el
ciclo en 100%. De manera análoga se describirá a continuación el proceso de la
marcha en la siguiente sección.
Figura 3.3. Rueda que representa el ciclo natural de la marcha [3].
3.2.2. El ciclo de marcha y sus fases
La marcha se efectúa a través de la sucesión repetida de una serie de
movimientos ejecutados fundamentalmente por las extremidades. En 1967 Lettre y
Contini describieron tres estadíos en la locomoción humana y animal: 1) fase inicial de
despegue desde el reposo, 2) estadío rítmico a velocidad constante y 3) fase de
descenso hasta el reposo. El ciclo de marcha ó zancada tiene lugar entre dos
repeticiones consecutivas de cualquier suceso de la marcha. Por conveniencia se
considera, el inicio del ciclo, el momento en que uno de los pies toma contacto con el
suelo. Cada zancada se compone de dos fases: fase de apoyo durante la cual el pie
se encuentra en contacto con el suelo y fase de oscilación en la cual el pie se halla en
el aire, al tiempo que avanza como preparación para el siguiente paso.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
59
La fase de apoyo representa el 60% del ciclo de marcha y la fase de oscilación
el 40%, a velocidad espontáneamente adoptada por el sujeto. En el momento en el que
ambos pies contactan en el suelo se llama fase de doble apoyo ó apoyo bipodal y
representa el 10% de la fase de apoyo para cada pie. En la Figura 3.4 se representa el
ciclo de la marcha, donde se indican las fases de las que se compone, así como la
subdivisión de éstas que más adelante se describirán.
Se denomina período de apoyo monopodal al intervalo durante el cual tan solo
un miembro se encuentra sobre el suelo, estando el miembro contralateral en su fase
de oscilación. Teniendo en cuenta lo previamente reflejado, el tiempo de apoyo de un
pie equivale a la suma del tiempo de apoyo monopodal de dicho pie y de los dos
tiempos de apoyo bipodal constituyendo lo que se llama tiempo de paso izquierdo y
tiempo de paso derecho, Figura 3.4.
La distancia entre dos apoyos consecutivos del mismo pie se denomina longitud
de zancada. Se denomina longitud de paso izquierdo a la distancia, medida en la
longitud de progresión, que separa el apoyo inicial del pie derecho del apoyo inicial del
pie izquierdo. Ver Figura 3.5.
De forma análoga se define la longitud de paso derecho y la suma de ambas
constituye la longitud de zancada. A la separación lateral entre los apoyos de ambos
pies, medida entre los puntos medios de los talones, se le denomina anchura del paso,
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
60
anchura del apoyo o base de sustentación, y al ángulo entre la línea media del pie y la
dirección de progresión, ángulo de paso.
Figura 3.4. Ciclo de la marcha humana normal [1].
Figura 3.5. Parámetros medidos durante el ciclo de marcha humana normal [1].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
61
La cantidad relativa de tiempo empleado durante cada fase del ciclo de marcha,
a una velocidad constante, es:
1. Fase de apoyo: 60% del ciclo
2. Fase de oscilación: 40% del ciclo
3. Doble apoyo: 20% del ciclo.
Figura 3.6. Cantidad relativa de tiempo empleado durante cada fase [1].
Las fases previamente enunciadas como constitutivas del ciclo de marcha
pueden, a su vez, subdividirse en varios momentos, para una comprensión más
detallada de lo que acontece durante la misma. Con ello podemos evaluar aquellas
situaciones patológicas en las que esas sub-fases desaparecen ó se modifican. Según
los diversos autores la denominación de cada sub-fase es distinta, pero expresan
momentos similares en la secuencia de acontecimientos de las extremidades. De esta
forma [1]:
La fase de apoyo se compone de:
1. Fase de contacto inicial
2. Fase inicial de apoyo o de respuesta a la carga
3. Fase media de apoyo
4. Fase final de apoyo
5. Fase previa de oscilación
0 – 2 %
0 – 10 %
10 – 30 %
30 – 50 %
50 – 60 %
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
62
La fase de oscilación consta de:
6. Fase inicial de oscilación
7. Fase media de oscilación
8. Fase final de oscilación
60 - 73 %
73 - 87 %
87 - 100 %
Figura 3.7. Ciclo de marcha: Fases y subfases [3].
Las condiciones naturales para el ciclo de marcha humana en situaciones
normales (no patológicas) implican aspectos dinámicos descritos por la energía, las
fuerzas de interacción y los movimientos musculo-esqueléticos en el que su análisis
puede ser representado a partir del desempeño en los planos sagital, transversal y
coronal o frontal. Sin embargo, es relevante realizar un análisis exhaustivo a partir de
las fases y sub-fases del ciclo de marcha y que consideran las características de la
zancada (tiempo y longitud) así como la longitud y ancho de paso. Todo ello, puede ser
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
63
involucrado para el análisis del desempeño cinemático tal como se describe en la
siguiente sección.
3.3. Cinemática de la marcha normal
Una vez descrito el ciclo de la marcha, así como las fases que lo componen,
esta sección da a conocer los datos cinemáticos que se emplean como referencia para
tomar decisiones terapéuticas y evaluación de tratamiento. Aquí se describe la
cinemática tridimensional del tronco, la pelvis y las extremidades inferiores (rodilla y
tobillo). El contenido de esta sección está basado en una revisión amplia de literatura
considerada para el análisis del ciclo de marcha y la determinación de procedimientos
de evaluación en casos patológicos con múltiples citas que garantizan su validez.
3.3.1. Cinemática articular
La cinemática articular se puede representar mediante diagramas con datos
temporizados, es decir las evoluciones articulares y sus derivadas (velocidad y
aceleración angular) con relación al tiempo. Cuando se describe una marcha patológica
la temporización es tan importante como la amplitud de movimiento y no es sencillo
apreciarla solo a partir de la observación visual, para ello la medición de éste parámetro
involucra el uso de dispositivos de estado sólido como mecanismo de percepción a
base de microcontroladores (instrumentación en tiempo real). Todas las gráficas tienen
las siguientes características:
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
64
El eje horizontal indica la línea de tiempo, sin embargo, en ésta tesis (con base
en las necesidades descritas por especialistas de los centros de rehabilitación en el
área) es de interés el análisis biomecánico durante el ciclo de marcha con propósitos
de caracterización y evaluación de movimiento (no se considera el tiempo de zancada),
tal que el factor de forma de las señales son evaluadas con relación al porcentaje del
ciclo de la marcha, en dónde el eje vertical indica el grado de movimiento de la
articulación. La fase de apoyo comienza con el contacto inicial en 0% del ciclo de la
marcha. Luego, la línea vertical regularmente ubicada en 60% del ciclo indica la fase de
“despegue” de los dedos del pie, que señala el comienzo de la fase de balanceo u
oscilación o último 40% del ciclo, como ejemplo se describe la flexo-extensión de la
rodilla en el plano sagital (ver Figura 3.8). Cabe mencionar, que los ángulos articulares
son ángulos relativos y determinan el movimiento del segmento distal en relación con el
segmento proximal [4].
Figura 3.8. Gráfica que representa la Flexo-Extensión de la Rodilla en el plano Sagital [4].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
65
A continuación se presenta la Tabla 3.1, con la descripción del movimiento de
las articulaciones y los segmentos por planos durante el ciclo de la marcha normal.
Tabla 3.1. Descripción del movimiento articular durante el ciclo de la marcha.
Plano coronal Plano sagital Plano transversal
Pa
rte
su
pe
rio
r d
el c
ue
rpo
[4
], [
5]
En la parte superior del
cuerpo existe un
movimiento mínimo, con
una amplitud de
movimiento general de
1°.
Existe un movimiento
mínimo con una amplitud
de aproximadamente 3°,
con un patrón oscilante
similar al de la pelvis.
El movimiento es
opuesto al de la pelvis,
con rotación interna en
la fase de apoyo y
rotación externa en la
fase de balanceo, con
una amplitud general de
5°.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
66
Pe
lvis
[4
], [
5]
Ésta se eleva desde el
balanceo medio y la
respuesta de carga que
desciende al apoyo
medio hasta el balanceo
inicial. La amplitud de
movimiento general de la
pelvis es de 4º y 8°
aproximadamente y la
posición neutral ocurre
en la postura media y el
balanceo medio.
Por lo general se inclina
hacia delante entre 4 y
10°. Un patrón oscilante
leve muestra una
inclinación anterior
creciente durante la
postura media y el
balanceo inicial; la
amplitud general de
movimiento es de unos
4°.
La amplitud del
movimiento general de
la pelvis es de
aproximadamente 10°,
formados por pocos
grados de rotación
interna durante el
contacto inicial, rotación
externa durante la fase
de postura, ligera
rotación externa en la
fase de “despegue” y
rotación interna en la
fase de balanceo.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
67
Ca
de
ra [
4]
El movimiento imita al de
la pelvis en el plano
coronal. La cadera
alcanza por lo general su
aducción máxima
durante la respuesta de
carga y progresivamente
se abduce durante el
resto de la fase de
apoyo; alcanza su
abducción máxima en el
balanceo inicial. La
amplitud de movimiento
general de la cadera es
de 13°.
La cadera se extiende
durante toda la fase de
apoyo desde su máxima
flexión que es de 37°,
obtenida en el balanceo
terminal, hasta su
máxima extensión en la
postura terminal (6°); la
flexión comienza en el
pre-balanceo y continua
durante toda la fase de
balanceo. La amplitud
del movimiento es de
43°.
Con relación a la pelvis,
el muslo realiza una
ligera rotación interna
durante la mayor parte
de la fase de apoyo y
rotación externa durante
el balanceo inicial, con
una amplitud de
movimiento general de
aproximadamente 8°.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
68
Ro
dilla
[4
], [
5]
El movimiento es mínimo
con la posición promedio
de aproximadamente 1º
varo.
Se flexiona en la
respuesta de carga, 20°,
luego se extiende;
comienza a flexionarse
nuevamente en el apoyo
terminal y alcanza unos
45° de flexión en la fase
de “despegue” de los
dedos del pie.
La segunda flexión
máxima de la rodilla, 64°,
ocurre aproximadamente
a 33% de la fase de
balanceo. La amplitud
normal de movimiento es
de alrededor de 60°.
La rodilla muestra
rotación interna
progresiva en la fase de
apoyo y rotación
externa en la fase de
balanceo. La amplitud
de movimiento normal
es de 11°.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
69
Pie
- T
ob
illo
[4
], [
5]
La amplitud general del
movimiento es de
aproximadamente 30°
con dos ondas de flexión
plantar seguidas por una
flexión dorsal. La dorsi-
flexión máxima 12°, se
alcanza en la fase de
apoyo terminal, seguida
por la flexión plantar
máxima, 18° en la fase
de balanceo inicial.
Progresión del pie: El
ángulo de progresión
del pie es el ángulo
comprendido entre el
eje mayor del pie y la
línea de progresión. En
la marcha normal el pie
rota ligeramente hacia
afuera de la dirección
de progresión. El pie
rota hacia afuera en el
balanceo inicial con una
amplitud de movimiento
general de
aproximadamente 6°.
De la Tabla 3.1, en la que se describe la cinemática articular durante el ciclo de
la marcha, se presentan a continuación (Tabla 3.2), las gráficas de la cinemática
articular promedio en los planos coronal, sagital y transversal en el caso de la pelvis,
cadera, rodilla y tobillo respectivamente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
70
Tabla 3.2. Cinemática articular normal de la marcha [4].
Plano coronal Plano sagital Plano transversal
Pe
lvis
Cad
era
Ro
dil
la
Pie
- T
ob
illo
La descripción de la cinemática articular que ocurre durante un ciclo de marcha
permite identificar el espacio de configuraciones admisible durante un ciclo de marcha
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
71
normal que se toma como base de comparación con la respuesta a la marcha
patológica. En la sección siguiente, y considerando aspectos cinemáticos que rigen la
biomecánica de marcha, se propone un procedimiento de evaluación y tratamiento para
pacientes con marcha patológica, siendo de especial interés el paciente hemipléjico.
3.4. Propuesta metodológica para evaluación de la marcha.
La locomoción de los seres humanos incluye secuencias de movimientos que
difícilmente se captan o son comprendidas sin determinadas herramientas o equipos de
diagnóstico específicos. De tal manera que el problema se complica cuando existen
alteraciones en dichos movimientos, como la marcha, afectada por un daño
neurológico. En ésta sección, se presenta la propuesta metodológica para evaluación y
estudio cinemático del ciclo de la marcha, la cual comprende el análisis biomecánico de
las extremidades inferiores del cuerpo, que comprende: la pelvis, la cadera, la rodilla y
el tobillo de tal manera que pueda ser utilizado en el diagnóstico y tratamiento de la
deficiencia identificada. La propuesta es basada en conocer el desempeño motriz a
través de los límites de movimiento articular en 24 de los movimientos articulares
biomecánicos del cuerpo humano, particularmente en extremidades inferiores y que
describen desplazamientos angulares en cada uno de los planos anatómicos
(transversal, sagital y coronal) correlacionados al movimiento asumido como normal.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
72
3.4.1. Diagrama de bloques
Figura 3.9. Diagrama de la
propuesta metodológica
para evaluación
de la marcha.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
73
3.4.2. Descripción del diagrama de bloques.
En esta sección se presenta la descripción del diagrama mostrado en la sección
previa, el cual esquematiza el procedimiento llevado a cabo para la evaluación clínica
de la biomecánica de la marcha en personas hemipléjicas sometidas a un tratamiento
de rehabilitación física con asistencia tecnológica.
Bloque A: Selección de pacientes.
El proceso da inicio dada una muestra N, que describe al número de pacientes
con diagnóstico de hemiplejia, y con el propósito de validar clínicamente la pertinencia
de evaluación de marcha para cada uno de ellos, se consideran los criterios clínicos
que definen la inclusión o exclusión del paciente, susceptible de evaluación de marcha
y rehabilitación asistida bajo el protocolo propuesto.
Bloque B: Caracterización de la marcha.
Cuando la persona pasa por el filtro de selección a esta etapa, se procede a
tomar medidas antropométricas en extremidades inferiores, se registran en una base
de datos incluyendo nombre, edad, peso y talla del paciente. Una vez registrada la
información, se colocan en el paciente 20 marcadores situados en los puntos
Selección
de pacientes
Caracterización del ciclo de
marcha
Análisis de marcha
Cinemática de marcha bípeda
DiagnósticoCondiciones de rehabilitación
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
74
anatómicos de acuerdo al protocolo de Davis [11], que señala principalmente los
puntos donde se encuentran las prominencias óseas. Posteriormente, el paciente se
coloca sobre la plataforma dinamométrica con el propósito de efectuar un recorrido en
línea recta tantas veces como lo indique el médico que al mismo tiempo esta
capturando la información que recibe de las cámaras infrarrojas. Cuando el paciente
termina de hacer su recorrido, el médico especialista procesa la información capturada
obteniendo así los parámetros espacio-temporales y las gráficas que caracterizan la
biomecánica de la marcha de la persona valorada.
Bloque C: Análisis de marcha.
Una vez caracterizada (gráfica y numéricamente) la marcha patológica del
paciente, se hace un análisis de ésta información comparándola con la biomecánica de
la marcha humana normal. Para cada paciente se realizan “n” número de evaluaciones
(definidas a partir de los criterios clínicos descritos en el Bloque A), donde “i” es la
evaluación en proceso, cada una de ellas se almacena en una base de datos
organizada de acuerdo al desempeño biomecánico, empleando la mejor evaluación
hasta el evento i-1 para correlacionarlo grafica y numéricamente con los parámetros de
marcha normales y los resultados de la evaluación actual i. El resultado pasa a la etapa
de diagnóstico que corresponde al bloque E.
Bloque D: Cinemática de marcha bípeda.
De la medición antropométrica se definen las longitudes que existen entre las
marcas de referencia (prominencias óseas) correspondientes a cada articulación, y que
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
75
describen a los parámetros cinemáticos de Denavit-Hartemberg (PD-H). Los PD-H
representativos del paciente son evaluados en el modelo cinemático directo de posición
(MCDP) generalizado y que es descrito a partir de la cadena cinemática de miembros
inferiores. El MCDP particular (del paciente en estudio: MCDP-P) permite relacionar a
los ángulos en las articulaciones con las evoluciones cartesianas u operativas durante
el ciclo de marcha. Para ello, la caracterización de marcha a través de los cambios
articulares son evaluados en el MCDP-P para verificar el desempeño cinemático a
través de las gráficas comparativas o en el mejor de los casos, a través de escenarios
virtuales con animación en traslación, rotación y escala.
Bloque E: Diagnóstico.
En esta etapa del procedimiento para evaluación de la marcha, se realiza un
diagnóstico clínico realizado a partir de tres aspectos relevantes: i) La condición
biomecánica actual del paciente, descrita a través de gráficas y datos numéricos, ii) La
evolución en el desempeño biomecánico del paciente, definida a partir de evaluaciones
previas, y iii) El análisis cinemático a partir del modelo obtenido del paciente y la
caracterización de marcha. El diagnóstico prescrito por el médico, será base para
definir las nuevas condiciones de rehabilitación, o en su caso dar a conocer un
dictamen o conclusión del procedimiento de evaluación y rehabilitación. Por lo tanto,
Bloque F: Condiciones de rehabilitación.
Cuando se ha realizado clínica y biomecanicamente el análisis de marcha y se
da el diagnóstico del paciente, es importante revisar cuáles han sido los beneficios
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
76
obtenidos, así como los retrocesos en la rehabilitación, en caso de haberlos. De tal
manera que se planteen las condiciones específicas de los cambios que deben
hacerse, tomando en cuenta que se deben minimizar las deficiencias detectadas en el
diagnóstico, calibrando el equipo tecnológico empleado para el estudio, así como la
modificación en la configuración del mismo, estableciendo nuevas consignas de
operación más objetivas y personalizadas. En caso de no encontrar alteraciones
significativas (negativas) en el diagnóstico se tomarán decisiones de medicación y
actividad física para continuar el proceso de evaluación de la marcha, siempre y
cuando el número de evaluación en el que se encuentre la persona, sea menor o igual
al total de evaluaciones establecidas al inicio de la sesión. Si es el caso, el
procedimiento se repite, iniciando a partir de la caracterización de la marcha.
3.4.3 Procedimiento
A. Selección de pacientes.
El objeto en estudio para llevar a cabo la caracterización del ciclo de marcha
patológica, que corresponde al diagnóstico de Hemiplejia, son las personas que la
padecen, así como las personas sanas que sirven de referencia para hacer una
comparación entre el ciclo de marcha normal y patológico de acuerdo a los parámetros
obtenidos, resultado del análisis de marcha. Por ello, es necesario hacer una selección,
exhaustiva de tales personas de acuerdo a criterios de inclusión y exclusión
establecidos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
77
i. Muestra de pacientes
La muestra de pacientes se realizo mediante la aplicación de una encuesta con
validación médica (Ver Apéndice A) que recaba datos personales del paciente,
diagnóstico, fecha de accidente cerebro vascular, entre otros datos significativos; así
como la invitación directa a médicos, especialistas en neurorehabilitación y
fisioterapeutas, para colaborar en este trabajo de investigación, ya que canalizan a
pacientes como candidatos para el estudio.
De ésta manera se obtiene una muestra de pacientes que procederán a ser
evaluados conforme a los criterios de inclusión y exclusión descritos en el siguiente
apartado.
ii. Criterios basados en valoración clínica: inclusión y exclusión
Dentro de un trabajo de investigación, la selección de las personas que serán
objeto de estudio, es considerada como un factor importante ya que no todos los
pacientes que tengan un diagnóstico clínico de Hemiplejia son aptos para el análisis de
marcha, cuya característica principal para ser elegidas, es que sean pacientes
ambulatorios después de haber sufrido un accidente cerebrovascular y haber ingresado
consecutivamente a un centro o clínica de rehabilitación. De acuerdo a la experiencia
del área médica relacionada con el caso de estudio, se han establecido los criterios de
inclusión y exclusión para la aplicación del procedimiento de evaluación en el ciclo de
marcha, definidos a continuación.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
78
Criterios de inclusión.
Los pacientes deben ser seleccionados bajo los siguientes criterios de inclusión:
a) Daño hemipléjico como consecuencia de un infarto cerebral;
c) Independencia total o parcial para caminar;
d) Pleno uso de sus facultades mentales;
e) Ser capaz de recibir órdenes y seguir instrucciones.
Criterios de exclusión.
Es excluido para el estudio, aquel paciente que:
a) No es capaz de dar 5 pasos consecutivos sobre una plataforma;
b) Tiene problemas de deficit intelectual;
c) Requerir el uso de órtesis para su marcha y que sin ella no logre dar un paso.
B. Caracterización del ciclo de marcha.
La marcha es caracterizada por la repetición de los movimientos corporales,
existiendo en cada paso un pequeño intervalo de tiempo (que para el interés del trabajo
de investigación se asume como un porcentaje en el ciclo de marcha), en que se
encuentran los dos pies apoyados en el suelo, y un solo pie soporta el peso del
cuerpo. Durante el período de contacto con la superficie de marcha el pie está
relativamente estacionario, y al proporcionar el soporte del cuerpo existen fuerzas
actuando entre el pie y dicha superficie. La sesión de caracterización de marcha tiene
una duración aproximada de 30 a 40 min, lo que dependerá de las características de
cada paciente, de la etapa en la que se encuentre, la magnitud de afectación motriz y
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
79
psicológica, ya que aún cuando se han pasado los criterios de inclusión, estas
consideraciones pueden variar el tiempo de la sesión.
i. Medición antropométrica.
El paciente debe familiarizarse con el personal que realizará el estudio de la
marcha, así como del laboratorio y equipo utilizado durante la sesión (recomendación
clínica preliminar para toma de confianza de parte del paciente); esto con el propósito
de realizar mediciones antropométricas, además de peso y estatura, de las
extremidades inferiores del cuerpo humano de interés para el estudio, tales como:
ancho, altura y longitud de pelvis; ancho de rodilla y tobillo; longitud del muslo, pierna y
pie; así como amplitud angular en articulaciones entre elementos inferiores. Para ello
se emplean dispositivos de medición como: balanza de pie, estadiómetro, pelvímetro,
cinta métrica y goniómetro [6].
ii. Colocación de marcadores.
Los aspectos que toman mayor influencia durante el proceso para adquirir datos
en el análisis de marcha es la colocación de los marcadores, y son empleados para
detectar los puntos anatómicos, ver Figura 3.10. Lo ideal para obtener los movimientos
más precisos de los huesos sería ubicar los marcadores directamente adheridos a las
estructuras óseas, pero evidentemente es imposible (representa un riesgo para el
procedimiento y los movimientos naturales). Por ello, se utilizan marcadores adheridos
a la piel en puntos anatómicos específicos, según el protocolo de Davis [7] [8].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
80
Figura 3.10. Ubicación de los marcadores en extremidad inferior [10].
Los puntos de referencia son las prominencias óseas, tales como el acromion, la
espina iliaca antero-superior, el trocánter mayor, el cóndilo femoral lateral, la cabeza
del peroné, el maléolo lateral, la cabeza del quinto metatarsiano, la primera vertebra
sacra y los calcáneos (Ver Figura 3.10). Utiliza también marcadores proyectados en
barras para la mitad del muslo derecho e izquierdo, así como en la mitad de la pierna
derecha e izquierda. De tal manera que dichos marcadores son detectados por las
cámaras infrarrojas [10], ver en la Figura 3.11 y 3.12.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
81
Figura 3.11. Marcadores para detectar puntos anatómicos.
Figura 3.12 Colocación de marcadores.
iii. Recorrido sobre la plataforma
Las dimensiones de la plataforma sobre la que caminan las personas para el
estudio, son tales que permiten lograr la ejecución de más de un ciclo de la marcha a
una cadencia libre (por recomendación de especialistas en fisioterapia se sugieren más
de 5 ciclos de marcha). Y se inicia el estudio con una toma de los pies cuando el sujeto
esta estático para obtener los valores de referencia, así como condiciones iniciales; y
se procede a las tomas en movimiento (Figura 3.13). Las personas comienzan a
familiarizarse con la plataforma y se les pide que caminen a lo largo de ella (3
recorridos regresando a la posición inicial), ver Figura 3.14, hasta alcanzar una
velocidad en la que las personas consideran que es normal mientras que los datos se
van registrando en la computadora por la detección de las cámaras infrarrojas y los
marcadores colocados en las prominencias óseas indicadas previamente [11]. Ver
Figura 3.10.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
82
Figura 3.13. Descripción de la plataforma para la caracterización del ciclo de marcha [12].
Figura 3.14. Recorrido a lo largo de la plataforma.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
83
iv y v. Captura y procesamiento de datos.
El paciente se considera embebido en el primer octante en R3 (espacio
cartesiano) cuyo marco ortonormal base (x, y, z) describe los planos útiles para la
caracterización de movimiento. Por ejemplo: plano YZ corresponde al plano coronal o
frontal, plano XZ comprende el desempeño en el plano sagital y finalmente el plano XY
constituye al plano transversal (ver Figura 3.2). Para describir el procedimiento de
captura y procesamiento de datos, se ejemplifica la acción en el plano sagital,
particularmente con una tarea de flexo-extensión de rodilla.
El ejemplo siguiente ilustra el proceso de captura de datos útiles para la
caracterización de la flexo-extensión de la rodilla, tomando en consideración los
procedimientos previamente definidos, se sitúan 4 marcadores que permitirán
identificar la posición cartesiana instantánea en el plano sagital (x,z), particularmente
como prominencia ósea en el trocante, cóndilo, peroné y maleólo. Las cámaras
infrarojas identificarán la posición cartesiana con relación a un marco ortonormal de
referencia base identificando los cambios que ocurren en las coordenadas de los
marcadores elegidos. La Figura 3.15 ilustra los marcadores que permiten ilustrar el
proceso de captura, e implica el conocer las coordenadas cartesianas: T(xt,zt),
C(xc,zc), P(xp,zp) y M(xm,zm), información útil para el procesamiento.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
84
Tabla 3.3 Descripción de
marcadores y nomenclatura de
pares ordenados identificados
por cámara infraroja
Descripción de variables en
el plano sagital (plano xz)
para una tarea de flexo-
extensión de rodilla.
Marcadores: Trocante (T),
Cóndilo (C), Peroné (P) y
Maleolo (M); y sus
correspondientes
coordenadas cartesianas
identificadas por las
cámaras infrarojas: T(xt, zt),
C(xc, zc), P(xp, zp) y M(xm,
zm) respectivamente.
Figura 3.15 Descripción de marcadores para la caracterización
de flexo-extensión de rodilla identificadas por una cámara
infraroja en el plano xz o plano sagital.
En la Figura 3.16 se ilustra la estructura ósea y marcadores empleados en el
procedimiento de captura. El procesamiento de la información adquirida consiste en
calcular las pendientes de las rectas involucradas, así definiremos las dos rectas
siguientes:
Recta 1 (LTC) Definida entre los marcadores T (Trocante) y C (Cóndilo).
Recta 2 (LPM) Definida entre los marcadores P (Peroné) y M (Maleolo).
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
85
Figura 3.16 Procedimiento para el procesamiento de datos capturados.
El propósito del procedimiento de la información capturada es conocer el valor
de la amplitud angular de la rodilla durante las acciones de flexión y extensión. Para
ello se emplea el siguiente procedimiento:
1. Cálculo de la pendiente de LTC:
(EC.1)
2. Cálculo de la pendiente LPM:
(EC. 2)
3. Cálculo de la amplitud angular de
la rodilla:
(EC. 3)
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
86
De esta manera se capturan los datos de todos los marcadores empleados y se
procesan de la misma manera para encontrar las amplitudes angulares en las distintas
articulaciones durante el ciclo de marcha. Toda esta información será útil para el
correspondiente análisis.
C. Análisis de marcha.
El uso clínico del análisis de marcha se basa en la comparación de medidas
derivadas del análisis de la cinemática, cinética y fisiología muscular del aparato
locomotor. En el estudio se hace una evaluación de la marcha en individuos sanos y
pacientes hemipléjicos con desviaciones asimétricas de la locomoción, debidas el daño
cerebrovascular [15]. La definición de análisis de la marcha es amplia e incluye un
gran variedad de técnicas que van desde el análisis de marcha mediante observación
hasta el análisis tridimensional asistido por computadora del movimiento. Los
laboratorios de análisis del movimiento están integrados por equipos multidisciplinares
(médicos, ingenieros, biólogos) que, utilizando una amplia variedad de recursos
tecnológicos, abordan el estudio del movimiento desde diversas perspectivas. Así, en el
caso particular de este trabajo, los parámetros generales de la marcha humana son
analizados mediante las siguientes categorías de estudio:
El análisis descriptivo del ciclo de marcha consiste en el examen de los
parámetros generales de la marcha humana, que incluye las características
espaciotemporales: velocidad, cadencia, longitud y distancia de paso.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
87
El análisis cinemático considera la marcha como una función del tiempo y el
espacio. Se evalúa el rango del movimiento articular, trayectoria del centro de
gravedad, velocidad y aceleración lineales y angulares (posición, velocidad y
aceleración).
De acuerdo a la captura de datos durante el experimento de marcha y su
posterior procesamiento para determinar la amplitud angular por articulación se
procede a obtener el desempeño gráfico de acuerdo al siguiente diagrama:
Figura 3.17 Diagrama de procedimiento para obtener gráficos de desempeño articular durante
evaluación del ciclo de marcha.
i. Emisión de gráficas de desempeño
El archivo plano ingresado a Matlab® contiene 44 parámetros y 100 muestras.
En su contenido incluye la información relativa al desempeño articular de la pelvis (P),
la rodilla (R), la cadera (C) y el tobillo (T) vistos desde el plano coronal, sagital y
transversal para ambas extremidades (derecha e izquierda). La tabla siguiente
representa el resultado gráfico del programa elaborado en Matlab® (ver Apéndice D).
Captura de datosEmisión de
coordenadas de los marcadores (x,y,z)
Procesamiento de datos para obtención de amplitud angular por articulación (θ)
Sistema de gestión de datos con el software
GaitEliclinic® 2.9.2
Generación de archivo plano *.MSWMM
Lectura de tabla en Excell y generación de
archivo *.xls
Lectura de archivo *.xls en Matlab para
obtener gráficos
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
88
En todas las gráficas se ilustra durante el ciclo de la marcha, la fase de apoyo
ocurrida al 60% del ciclo. La organización de los gráficos emitidos, para ambas
extremidades, es de la siguiente manera:
Tabla 3.4: Descripción de la organización de gráficas emitidas por Matlab®.
Plano coronal
Pelvis Rodilla
Cadera Tobillo
Plano sagital
Pelvis Rodilla
Cadera Tobillo
Plano transversal
Pelvis Rodilla
Cadera Tobillo
A continuación se presenta un ejemplo de emisión gráfica desarrollado a partir
de la caracterización de marcha en una persona sana con el propósito de dar a conocer
el factor de forma de las señales, a lo largo de las fases de marcha que ocurren
durante un ciclo, para cada uno de los planos que reflejan el desempeño de cada una
de las 4 estructuras óseas de interés durante la caminata.
Extremidad derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
coronal de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
89
Figura 3.18 Ciclo de marcha en el plano coronal de la extremidad inferior derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
sagital de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.19 Ciclo de marcha en el plano sagital de la extremidad inferior derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
transversal de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
90
Figura 3.20 Ciclo de marcha en el plano transversal de la extremidad inferior derecha.
Extremidad izquierda
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
coronal de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.21 Ciclo de marcha en el plano coronal de la extremidad inferior izquierda.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
91
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
sagital de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.22 Ciclo de marcha en el plano sagital de la extremidad inferior izquierda.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
transversal de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.23 Ciclo de marcha en el plano transversal de la extremidad inferior izquierda.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
92
ii. Correlación gráfica-numérica
En esta sección se da a conocer la amplitud angular proyectada sobre los planos
anatómicos: coronal, sagital y transversal para las estructuras óseas de interés (que
tiene contribución y efectos en el ciclo de marcha): pelvis, cadera, rodilla y tobillo.
De acuerdo al marco ortonormal cuyos ejes corresponden a los ejes de giro que
demarcan el desplazamiento angular, es posible conocer los límites biomecánicos del
cuerpo humano en condiciones normales.
En la tabla 3.5, se aprecia la estructura ósea de la pelvis y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 6.9º, 1.8º y 8.8º.
Tabla 3.5. Proyección de ángulos articulares sobre los planos anatómicos para la pelvis.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Pelvis
6.9
1.8
8.8
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
93
En la tabla 3.6, se aprecia la estructura ósea de la cadera y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 11.9º, 44.2º y 7.10º.
Tabla 3.6. Proyección de ángulos articulares sobre los planos anatómicos para la cadera.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Cadera
11.9
44.2
7.10
En la tabla 3.7, se aprecia la estructura ósea de la rodilla y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 10.2º, 52.6º y 23.3º.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
94
Tabla 3.7. Proyección de ángulos articulares sobre los planos anatómicos para la rodilla.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Rodilla
10.2
52.6
23.3
En la tabla 3.8, se aprecia la estructura ósea del tobillo y el marco ortonormal
con dos ejes de giro caracterizados que representan los movimientos biomecánicos de
flexo-extensión y rotación (requeridos en el ciclo de marcha) proyectados sobre los
planos sagital y transversal con una amplitud angular respectiva de 23.9º y 14.3º.
Tabla 3.8. Proyección de ángulos articulares sobre los planos anatómicos para el tobillo.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Tobillo
23.9
14.3
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
95
iii. Biomecánica humana normal
En las tablas 3.4, 3.5, 3.6 y 3.7 se aprecian los desempeños biomecánicos de
cada estructura ósea y la amplitud angular que un humano tiene posibilidad de efectuar
bajo condiciones normales. Todo ello representa al espacio de configuraciones
admisibles que le permiten desarrollar actividades tales como: caminar, sentarse,
agacharse, ejercitarse, saltar con la contribución muscular (flexibilidad y elasticidad),
entre otras muy relevantes por ser comunes.
Sin embargo, en este trabajo de investigación, resulta de especial interés la
actividad humana de la caminata, es por ello de que se centra especial atención en el
estudio y evaluación del ciclo de marcha. En las Figuras 3.24 y 3.25 se presenta la
emisión de gráficas para el despliegue angular de flexo-extensión, rotación y aducción-
abducción en las 4 estructuras óseas de interés.
Cabe hacer mencionar, que para cada caso gráfico se proporcionan respuestas
de un paciente con hemiplejia y una persona sana. En ambos casos el contradominio
de graficación nunca excede de la amplitud angular descrita en las tablas 3.4, 3.5, 3.6
y 3.7. Pero la diferencia entre ellas, gráficamente es notable.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
96
Figura 3.24. Relación de la biomecánica de la pelvis para una
persona sana y un paciente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
97
Figura 3.25. Relación de la biomecánica de la cadera, rodilla y
tobillo para una persona sana y un paciente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
98
iv. Evaluación de marcha, almacenamiento y análisis de historial
En esta sección de la evaluación del ciclo de marcha se pretende conocer el
desempeño actual y el nivel de progreso, a partir del análisis descriptivo especificado
previamente. Para ello se consideran tres aspectos relevantes que conducen a una
conclusión; el primero de ellos consiste en almacenar conductas o desempeños del
ciclo de marcha previos, de manera tal que se actualiza el mejor de ellos por su
correlación con la marcha normal que representa la biomecánica de caminata ideal
(publicada y múltiplemente citada por la comunidad interesada), para esto el segundo
aspecto representa el desempeño actual que se compara con la mejor de las
evaluaciones previas, todo ello relativo al tercer aspecto que representa la marcha
normal.
La conclusión actual puede favorecer al procedimiento de evaluación por la
existencia de un progreso, cabe mencionar que puede existir un retroceso dado que el
paciente (sujeto de estudio y tratamiento) no cumple con las consignas médicas
establecidas en la evaluación previa, por lo que una evaluación previa puede tener un
mejor desempeño que la actual.
Para describir las reglas que permiten fundamentar la conclusión de la
evaluación actual, se presentan las siguientes condiciones posibles:
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
99
I. EA > EP => Progreso
II. EA < EP => Retroceso Conclusión:
Paciente no comprometido con
tratamiento.
III. EA
Progreso VS
Marcha
normal Conclusión: 1
Correlación de amplitud
angular con biomecánica.
2 Descripción del nivel de
progreso de acuerdo a la
ejecución oportuna de las fases
y subfases del ciclo de marcha.
3 Argumentar el % de
rehabilitación para la toma de
decisiones en el tratamiento.
Donde:
EA: Evaluación actual >: Mejor desempeño
EP: Evaluación previa (mejor) < : Menor desempeño
: implicación (si – entonces)
D. Cinemática de marcha bípeda
Es fundamental conocer el modelo matemático de un sistema, ya que
proporciona información respecto a su comportamiento actual o futuro. Por lo tanto se
ha de considerar el ciclo de la marcha como un sistema biomecánico del movimiento
humano que tiene una representación matemática basada en los parámetros
cinemáticos y espacio-temporales obtenidos del análisis de marcha. A continuación se
mencionan brevemente los puntos a considerar para obtener el modelo cinemático
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
100
directo de posición de la marcha bípeda que más adelante en el capítulo 5 se
desarrollará, y que en el Apéndice F se dan a conocer los conceptos básicos.
i. Parámetros Denavit-Hartenberg
Para obtener el modelo cinemático directo, se emplea el método sistemático de
Denavit-Hartenberg (D-H) para situar los sistemas de coordenadas asociados a cada
eslabón de la cadena cinemática. Este método, permite el paso de un eslabón al
siguiente mediante 4 trasformaciones básicas que relaciona el sistema de referencia
del elemento i con el sistema de referencia del elemento i-1.
ii. Modelo cinemático directo de posición
El Modelo Cinemático Directo de Posición (MCDP) es la representación
matemática de la cinemática de una cadena de eslabones serialmente interconectada
(cadena cinemática), y se obtiene mediante los siguientes pasos:
Obtener los Parámetros Denavit-Hartenberg correspondientes a la cadena
cinemática propuesta.
Sustituir los parámetros correspondientes del eslabón i en la matriz de
transformación Ti, que es la matriz de transformación base.
Realizar el producto para obtener la matriz de transformación , la
cual contiene el vector de posición del efector final.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
101
iii. Desempeño cinemático
El desempeño cinemático consiste en evaluar en las ecuaciones del MCDP el
desempeño articular de cada grado de libertad concerniente a la estructura ósea
caracterizada (definida en cada eje de giro por marco ortonormal), con el propósito de
conocer, durante el ciclo de marcha, la conducta en el espacio cartesiano y de algún
modo su relación con el entorno. De la misma manera es útil para la planificación de
movimiento del sistema robótico asistencial o de rehabilitación, bajo el principio de
contribuir en las evoluciones del paciente evitando al máximo un daño no deseado al
pretender superar los movimientos permisibles en el estado en el que se encuentre
dicho paciente durante el uso de ésta tecnología.
E. Diagnóstico.
El programa o procedimiento metodológico para evaluar el ciclo de marcha en
las personas con hemiplejia, está encaminado principalmente para conocer las
capacidades físicas, la formación y reeducación de las habilidades motrices para
caminar de acuerdo la biomecánica normal humana.
El ciclo de la marcha de una persona hemipléjica, se puede describir a través de
observaciones de las actitudes posturales corporales, y de los movimientos durante la
locomoción y clínicamente los beneficios serían:
1) Clarificar los tipos y grados de anormalidad de la marcha.
2) Prevenir o minimizar dichos trastornos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
102
3) Establecer programas terapéuticos más objetivos y personalizados.
4) Evaluación de los mismos a lo largo del tiempo.
5) Evaluación objetiva de los déficits de forma reproducible.
De igual manera, para el modelo biomecánico que se requiere en el diseño del
exoesqueleto, habrán de considerarse los parámetros espacio-temporales, que se
muestran en la Tabla 3.10, mismos que se han descrito en la sección 3.1.2. [8]:
Tabla 3.10. Parámetros espacio-temporales, cinemáticos [11].
PARÁMETROS DE LA MARCHA
ESPACIOTEMPORALES CINEMÁTICOS
Temporales Tiempo en fase de soporte (s) Tiempo en fase de balanceo (s) Tiempo de soporte (% del ciclo) Tiempo de balanceo (% del ciclo) Duración del ciclo o zancada (s) Cadencia (pasos/min) Duración de doble soporte (s) Porcentaje de doble soporte (% ciclo) Espaciales Largo de paso (m) Longitud del ciclo de zancada (m) Ancho del paso (m) Espaciotemporales Velocidad (m/s) Velocidad de balanceo (m/s) Velocidad media (m/s)
Valores de los ángulos articulares con el paciente de pie: Plano Frontal
Oblicuidad de la pelvis Aducción-abducción de cadera Plano Sagital Basculación de pelvis Flexo-extensión de cadera Flexo-extensión de rodilla Dorsiflexión-plantiflexión de tobillo Plano transversal Rotación pelvis Rotación interna-externa de cadera Rotación interna-externa de rodilla Ángulo de progresión del pie
F. Condiciones factibles de rehabilitación
Generalmente se presentan muchos obstáculos para lograr procesos de
rehabilitación física en cuanto a la adaptación y constancia del paciente, así como para
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
103
establecer un diagnóstico claro frente al ciclo de marcha y recuperación de la misma.
En ésta sección, del esquema propuesto, se propone la metodología para la evaluación
de la marcha, con base en un modelo de control y aprendizaje, medido a través de un
sistema de análisis de movimiento.
Así, la estrategia que permite hacer un diagnóstico eficaz y un adecuado
seguimiento de los logros de recuperación de los pacientes es la evaluación de las
características de base y de recuperación de los pacientes. Aprovechando la
posibilidad de hacer mediciones cuantitativas gracias al desarrollo y a la tecnología en
áreas como la informática, la biomecánica y la videogametría se desarrolla un sistema
de evaluación del movimiento de la marcha bípeda. Lo que permite plantear
diagnósticos más asertivos, pronósticos adecuados y hacer seguimientos de la
recuperación de manera más confiable [15].
Un principio de rehabilitación propuesto en ésta sección es definido a
continuación:
a) A partir de la caracterización del ciclo de marcha, la emisión de gráficas de
desempeño articular, y el correspondiente análisis de marcha; se define un
diagnóstico clínico que describe las limitaciones de movimiento articular o
bajo factor de forma en alguna o algunas estructuras óseas, todo ello con
relación a un ciclo de marcha normal.
b) Diseñar la planificación de movimientos requeridos para la tarea de
fisioterapia, y terapia ocupacional, de manera tal que el paciente pueda
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
104
emprender la tarea de corrección sin riesgo de daños físicos adicionales o
fatiga del sistema musculo-esquelético.
c) Selección de la tecnología para asistencia médica o corrección
(rehabilitación), como dispositivos robóticos y equipo de instrumentación en
tiempo real. En ésta sección se propone el uso de dispositivos robóticos tipo
exoesqueleto, cuyas técnicas de control de movimiento y fuerza emplean la
planificación de fisioterapia y terapia ocupacional.
d) La caracterización de movimiento de manera periódica es relavante para
definir el avance o mejora del paciente.
3.5. Conclusiones
En éste capítulo de se dio a conocer, fundamentado en procedimientos y
literatura actualizada, una propuesta para el análisis de marcha en pacientes con
hemiplejia como consecuencia de un accidente cerebro-vascular (EVC). Como parte de
la base del procedimiento se especificaron aspectos relevantes del ciclo de marcha
basados en la biomecánica normal y las fases que lo componen. Se describe la
nomenclatura y concepción empleada en ésta tesis, particularmente en el capítulo 4 de
resultados experimentales y evaluación, como los planos anatómicos de análisis
(transversal, sagital y coronal), y las estructuras óseas de análisis como pelvis, cadera,
rodilla y tobillo para ambas extremidades, así como los marcos ortonormales
constituidos por los ejes de giro, y las fases de oscilación y apoyo. Se presentó la
cinemática articular y los límites biomecánicos para las condiciones de marcha normal,
de manera tal que sean empleadas como base para describir las condiciones de un
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
105
paciente. La sección que se considera más relevante corresponde a la propuesta
metodológica para evaluación de marcha, descrita explícitamente por un diagrama de
bloques y flujo de señales, se realiza la descripción de cada componentes definido
como subsistema del procedimiento (bloques principales), constituidos como: la
selección de pacientes, la caracterización del ciclo de marcha, el análisis de marcha, al
cinemática de marcha bípeda, el diagnóstico y las condiciones de rehabilitación. Éste
capítulo se presenta como la base teórica para fundamentar y organizar el trabajo de
campo o experimental reportado en el siguiente capítulo.
3.6. Referencias
[1]. Beseler, Ma. Rosario. Estudio de los parámetros cinéticos de la marcha del
paciente hemipléjico mediante plataformas dinamométricas. Universidad de
Valencia, 2006.
[2]. J. Moreno, F. Brunetti, R.Ceres. "Una aproximación a la compensación y
valoración funcional de marcha humana". Instituto de Automática Industrial.
Consejo Superior de Investigaciones Científicas. Madrid
[3]. C. Vaughan, B. Davis and J. O’Connor. Dinamics of Human Gait. Second
Edition. Cape Town, South Africa, 1999.
[4]. Fitzgerald, Kaufer y Makan. “Ortopedia”. Tomo I. Editorial Panamericana.
Argentina, 2004.
[5]. Perry, J. Gait analysis, normal and pathological function. SLACK Incorporated.
USA, 1992.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
106
[6]. Claudio H. Toboadela. "Goniometría. Una herramienta para la evaluación de las