Apuntes de Regulación y Automatización. Prácticas y Problemas. - 1 - Apuntes de introducción a la regulación y automatización de máquinas y procesos. Prácticas y problemas. Angel Montes. Profesor Titular Escuela Universitaria. Departamento Ingeniería de sistemas y Automática. ETSID
Transcript
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 1 -
Apuntes de introducción a la regulación y automatización de máquinas y
procesos. Prácticas y problemas.
Angel Montes.
Profesor Titular Escuela Universitaria. Departamento Ingeniería de sistemas y Automática.
ETSID
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 2 -
AUTOMATIZACIÓN. Desde los primeros tiempos de la humanidad, el hombre ha fabricado herramientas, en el fondo la idea de las herramientas, es conseguir realizar una tarea de la maneara mas fácil, eficaz sencilla, y por que no que se realice con el menor trabajo por parte del ser humano. Automatizar el conseguir que una planta funcione de manera automática, sin intervención humana, mas que en la fijación de los objetivos, y en la verificación de los resultados. El control automático como tal se ha venido desarrollando desde el inicio de la historia, en sus inicios de forma empírica, en los últimos siglos se desarrolla una base teórica que fundamenta su realización. A través de las distintas épocas, la humanidad ha tenido que ir resolviendo problemas que se le presentan, para su comodidad en nuestra vida, para lograr la supervivencia, siendo en muchos casos que los mayores avances del control automático, se dan en las guerras, y sobre todo en las Guerras Mundiales, pues entonces muchas otras ramas ven en la necesidad de utilizar estas tecnologías y aplicarlas. Es un trabajo en grupo, conjunto de diferentes equipos el que permite el progreso de la teoría del control automático, siempre orientado a la resolución de problemas prácticos que tuvieron que ser solucionados durante la historia. Se suelen distinguir como hitos fundamentales:
• Los Griegos y árabes intentan calcular de una manera exacta el tiempo, por tanto dependiendo lo menos posible del factor humano. Esto representa un período aproximadamente localizado entre los años 300 AC al 1200 DC.
• La Revolución Industrial en Europa, en el último tercio del siglo XVIII, y el interese simbolizado en Watts de automatizar procesos productivos.
• El periodo entre la Primera y Segunda guerra mundial, desde 1910 hasta 1945, en que se cimientan los fundamentos teóricos.
• El principio de la era espacial y de la informática en 1957. A partir de entonces la automatización se ha introducido desde los niveles mas pequeños, de un simple chip, hasta una planta industrial completa.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 3 -
Automatismos. Una necesidad de tener un control automático en la antigüedad, era la necesidad de la determinar exactamente el tiempo. Hacia el 270, el Griego Ktesibios inventó un regulador de flotador para un reloj de agua. La función de este regulador era mantener el nivel del agua de un tanque a una profundidad constante. Esta profundidad constante producía un flujo constante de agua por un tubo en el fondo del tanque que llena un segundo tanque en un tiempo constante. Según el nivel del agua en el segundo tanque así era el tiempo transcurrido. El regulador de Ktesibios usó un flotador para controlar la entrada del agua por una Válvula, cuando el nivel del agua disminuye la válvula se abre y rellena el depósito. También uso algo parecido Philon de Bizancio en el 250 para mantener un nivel constante del aceite en una lámpara. Durante el primer siglo después de Cristo, Herón de Alejandría desarrolló reguladores de flotador para relojes de agua. Los Griegos usaron este regulador de flotador y dispositivos similares para la distribución automática de vino, el diseño de sifones para mantener diferencias de nivel de las aguas constantes entre dos tanques, la apertura de puertas de templo, etcétera. Del año 800 al 1200 varios ingenieros árabes usan reguladores de flotador para realizar cronómetros de agua y otros usos. A partir de entonces surge un gran periodo sin desarrollos destacables salvo el regulador de temperatura inventado por el alemán Cornelius Drebbel (1572-1663), desarrollado para calentar un incubador. Otro sistema
automático de control que goza consta auténticamente es el sistema inventado por Meikleen en 1750, consistente en colocar unas aspas auxiliares de cola en el mismo eje de las aspas principales de los molinos con el objeto de optimizar el aprovechamiento de la energía eólica. Si bien a lo largo del siglo XVIII se empiezan a despuntar los dispositivos de control automático, su zenit llega con el regulador centrífugo de James Watt (1736-1819). El denomino a su sistema de control “governor”. Este es el punto de partida del control automático científico. Se trataba de un dispositivo que proporcionaba una acción de control proporcional en la regulación de la velocidad en las máquinas de vapor.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 4 -
A mediados del XIX, Siemens (1823-1883) modifica el regulador de Watt, dotándole de acción integral, e introduciendo la acción de control “flotante”, sin referencia fija. Esto modifica las técnicas de diseño de las máquinas y se mejora el proceso de fabricación, se hizo explícita una tendencia creciente que mostraba que la velocidad de la máquina variaba cíclicamente con el tiempo. Este fenómeno también se observó en el regulador centrífugo de velocidad de un telescopio astronómico accionado por un mecanismo de relojería, y fue investigado por G.B. Airy (1801-1892). En 1840 mostró que la dinámica de un regulador puede ser descrita por ecuaciones diferenciales, pero encontró algunas dificultades para determinar las condiciones de un comportamiento estable. En 1851, Airy consiguió llegar a la raíz del problema matemático, aunque desgraciadamente su trabajo era un tanto intrincado y difícil de seguir por lo que no tuvo la difusión deseada, y permaneció en el más absoluto de los secretos para los ingenieros que estaban tratando de resolver el problema de la fluctuación de la velocidad de las máquinas. El problema era tan serio que atrajo la atención de un gran número de importantes científicos e ingenieros de la época. Finalmente fue resulto por Maxwell (1831-1879), quien inició así la teoría de los sistemas de control automático con su trabajo “On governors” (1868). La contribución de Maxwell fue reconocer “que la conducta de un sistema de control automático en la velocidad, de una posición de equilibrio se podía aproximar por una ecuación diferencial lineal, y por tanto su estabilidad se podía discutir, en términos de las raíces de una ecuación algebraica asociadas. De esta manera, Maxwell planteó el problema general de investigar la estabilidad de un sistema dinámico en función de localizar las raíces de su ecuación característica. Él llegó a especificar que un sistema era inestable cuando la parte real de sus raíces complejas fuesen positivas, pero el problema era cómo determinar la localización de las partes reales sin calcular las soluciones de la ecuación para sistemas de orden elevado. La solución del problema planteado por Maxwell la dio Edward J. Routh (1831-1907) en 1877, abordando de forma matemática la estabilidad de sistemas de orden alto basándose en los trabajos de Cauchy. En 1895, Adolf Hurwitz resolvía el problema de la estabilidad de sistemas lineales en términos de un conjunto de determinantes. También el matemático ruso A. M. Lyapunov estudió el tema de la estabilidad en 1892, utilizando las ecuaciones no lineales del movimiento; sin embargo, sus trabajos no se aplicaron al control hasta 1958, en que se desarrollaron los estudios de sistemas no lineales en los sistemas electrónicos. La mayor parte de las aplicaciones están relacionadas con actividades básicas, como control de temperatura, presión, nivel de líquido, velocidad en ejes de maquinaria, etc. El objetivo era regular y asegurar la estabilidad. La introducción de sistemas neumáticos, de vapor o hidráulicos, en grandes buques y cañones inicia el interés hacia los mecanismos de control de posición hacia el último cuarto de siglo del XIX, apareciendo el término de servomotor en 1873.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 5 -
La necesidad de obtener amplificadores de señal para compensar las pérdidas en los cables de transmisión, de lineas telefónicas desasistidas, con muy bajo nivel de distorsión, llevaron a Harold S. Black (1898-1983) en 1934 a la invención del amplificador realimentado. Los amplificadores construidos hacia 1932 presentaban cierta tendencia, a la inestabilidad y no se conseguía que el aumento o amflicación fuera mayor de 1. El análisis de estos sistemas utilizando técnicas clásicas basadas en ecuaciones diferenciales (el enfoque “mecánico”) era impensable, ya que estos dispositivos podían contener más de 50 elementos almacenadores de energía independiente. Harry Nyquist (1889-1976) propuso, en 1932, una solución a este problema basándose en la forma de la respuesta en frecuencia de la ganancia en lazo abierto. Aunque Nyquist dejó abierto el problema de cómo se relacionan la amplitud y la fase, este problema fue resuelto por Hendrik Bode, en 1940, al introducir los términos de margen de fase y de margen de ganancia. Aunque desde la mitad de la década de los 20 los controladores todo-nada (onoff)habían sido muy utilizados en procesos industriales, es durante estos años cuando para resolver y mejorar los problemas de regulación de las máquinas se introdujeron controladores más avanzados. En 1922, Nicholas Minorsky (1885-1970) presenta un análisis claro de los sistemas de control de posición, y formuló la ley de control que hoy se conoce como control PID. Es de citar en esta época prebélica y durante la guerra mundial, las aplicaciones del control al material bélico, radar, control de tiro, guiado de cohetes,etc.. Muchos de ellos fueron realizados con el objetivo de una aplicación concreta y desarrollados matemáticamente en épocas posteriores. Eran necesarios y urgente el desarrollo y aplicación inmdiata Una contribución de gran importancia fue la de J.G. Ziegler y N.B. Nichols (1942), que propusieron unas fórmulas empíricas para asignar los coeficientes de las distintas acciones basándose en valores del proceso a controlar y que son medidos experimentalmente. También Evans en 1948, completó el desarrollo de las técnicas basadas en variable compleja al introducir el lugar de las raíces. Este método permite hacer deducciones sobre las raíces de la ecuación característica en lazo cerrado cuando varía un parámetro de la planta, y por lo tanto, estudiar así su estabilidad. La necesidad de controlar la posición de las antenas de radar en función de unos datos disponibles de forma intermitente, motivó el estudio de los sistemas muestreados. La aplicación de las computadoras al control de procesos industriales en los años cincuenta, favoreció el estudio y desarrollo de los sistemas discretos. Los primeros estudios publicados sobre estos temas son los de Shanon (1948), que trataban sobre el muestreo de señales. Posteriormente Salzer utilizó por primera vez la transformada z, sobre la que desarrolló la teoría sobre sistemas muestreados. Posteriormente, estos avances fueron sintetizados con las aportaciones de Jury, Ragazzini, Franklin, Tou, entre otros. Hasta ese momento, gran parte de la teoría de control discreta se apoyaba en métodos de análisis y diseño basados en la frecuencia, pero la interpretación de z-1 como operador retardo hizo evolucionar la teoría al análisis en el dominio del tiempo.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 6 -
La teoría clásica de control estudia sólo sistemas dinámicos deterministas, lineales y de parámetros constantes, de una sola entrada y una sola salida, y se complicaba mucho el desarrollo teórico para sistemas de múltiples entradas y salidas, no lineales, de parámetros variables con el tiempo o de carácter estocástico. Las limitaciones de la teoría clásica y la necesidad de mayor precisión en el diseño de sistemas de control, necesaria en la tecnología aerospacial, hacía que la teoría clásica fuera insuficiente para la resolución de los problemas que se presentaban. El desarrollo del computador digital da una potente herramienta de calculo e implementación de algoritmos de control complejos. A partir de la segunda mitad del siglo XX se inicia una gran revolución en las técnicas de control; la guerra fría, la era aerospacial y la aparición de los computadores digitales produce un auge de las nuevas teorías de control; un nuevo paradigma científico está en marcha y desembocará en lo que se ha llamado la segunda revolución industrial. A partir de aquí se inician desarrollos en paralelo de los sistemas continuos de control, de los sistemas discretos, de las teorías modernas (vectoriales), de los sistemas ·on-off·, o digitales, que a partir de aquí continúan desarrollándose y subdividiéndose. Conceptos iniciales Pasemos a introducir en el estudio algunos conceptos a utilizar a partir de ahora, empecemos por:
Variables: En los sistemas de control llamamos variables del sistema a las señales que actúan sobre el sistema o elemento que queremos controlar en su funcionamiento, y las señales o respuestas que produce el sistema en su funcionamiento. Todas las señales que intervienen en el funcionamiento de un sistema, son las variables del sistema. Sistema: Llamamos así a la reunión de elementos que funcionan conjuntamente, y que sobre los que actúan las señales o variables, y como consecuencia, producen nuevas señales. Estas variables o señales actuantes, y producidas pueden ser de cualquier tipo imaginable. Controlar: Una señal es poder cambiarla en un sentido prefijado de antemano, detal manera que mantenga un valor propuesto anteriormente, o vaya cambiándolo a medida que se desee. Automatizar: conseguir que un sistema funcione de manera autónoma, sin intervención humana salvo en la indicación de objetivos a conseguir. Un sistema lo representamos ahora inicialmente en la manera indicada en la figura 1, en que cada flecha representa algún tipo de variables, como por ejemplo:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 7 -
En el sistema a controlar tenemos unas variables de salida, son las señales de respuesta del sistema, como consecuencia de la actuación de las señales que actúan sobre el sistema. Podemos tener señales de perturbación, son señales que actúan sobre el sistema, como las entradas, pero son incontrolables y el operador no puede tener sobre ellas ningún control. Podemos siempre intentar minimizar sus efectos sobre el sistema, pero siempre existirán. Variables de entrada, las señales esternas que actuan sobre el sistema y fijan los objetivos. Pueden existir variables internas, o procedentes del interior del sistema sin relación directa con las entradas, y que no podemos medir. Al conjunto mínimo de variables sean del tipo que sean, que permiten estudiar y caracterizar el comportamiento de un sistema cualquiera, lo denominamos variables de estado del sistema. Estas señales o variables del sistemas pueden ser:
• Señales continuas en los sistemas lineales de teoría moderna y clásica. • Señales muestreadas, el resultado de medir una señal continua en intervalos
determinados de tiempo. • Señales binarias solo toman dos valores distintos, 0 y 1, o cierto y flaso, on-
off, etc.. Esta distinción en las señales o variables conduce a sistemas de control basados en reguladores continuos, o implementados en computadoras, para aquellos que utilizan señales continuas o muestreadas, y sistemas digitales o basados en autómatas programables, PLC para las señales binarias.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 8 -
El funcionamiento de una planta, puede ser manual, el sistema tradicional en que el operador a través de diferentes elementos de control, interruptores, palancas, etc.. va introduciendo las ordenes para realizar las direntes operaciones de la planta. Es el estadio inicial del que partimos. Automática, la planta funciona de manera autómata si intervención humana de los operadores, es el objetivo final. Semiautomática, parte de las operaciones se realizan de manera automática, parte de forma manual, suele ser el paso intermedio en la automatización completa de un proceso. Automatismo, máquina o sistema capaz de cumplir funciones de mando, control y regulación, sin que me dien agentes externos, también es el dispositivo que añadimos a un sistema para que funcione de manera automática, o incluso el diseño, programa, que implementamos en un sistema. Automatizar, se llama así al uso de máquinas o aparatos automáticos en la industria. Someter a automatización a un proceso industrial o de fabricación, o administrativo, a un solo mecanismo o a un conjunto de máquinas. Posteriormente se introduce la jerarquía entre mecanismos automatizados y sus controles. Automatización industrial Utilización de técnicas y equipos para el gobierno de un proceso industrial de tal forma que este sistema funcione de manera autónoma con la mínima intervención humana. En la mayoría de los casos, el grado de intervención humana va íntimamente relacionado con el coste de la operación, precisión requerida, precio a conseguir del producto, coste, etc.. Suele ser objeto de estudio en análisis de costes y producción. Control se denomina así a la manipulación indirecta de las variables de un sistema o planta, a través del sistema de control implementado. La automatización en sus diferentes acepciones o alcances se implementa cada día mas, en cualquier proceso de fabricación, desde un simple semáforo a una planta química completa. La aplicación de sus procedimientos, como la realimentación los diferentes hechos diarios hace que se deba tener en cuenta en muchas ocasiones, es paradigmático el caso del puente de Tacoma, en el que la estructura metálica de un puente, situado a la entrada de una bahía, resulto ser sensible a las ráfagas de viento, mas exactamente “al periodo de repetición” de las ráfagas, dato que o había sido tenido en cuenta en su diseño, hizo que el puente se destruyera. A pesar de que es conocido que algunas estructuras en concreto, son sensibles a fenómenos periódicos, repetición de golpes, impulsos, etc.. no suelen ser tenidos en cuenta en muchas ocasiones. También es conocido el caso contrario, es usado un sistema de amortiguamiento automático en los cimientos de edificios en las zonas sísmicas sensibles, para resistir terremotos.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 9 -
TEMA 1.
INTRODUCCIÓN AL ÁLGEBRA DE BOOLE. VARIABLES Y FUNCIONES LÓGICAS.
OBJETIVOS:
Introducir los conceptos básicos de las funciones lógicas, base de los estudios de lógica binaria, que utilizamos en la definición, programación y ejecución de cualquier problema de automatismo. En este primer tema se introduce el álgebra de Boole, conjunto de reglas elementales y necesarias para el manejo de funciones lógicas, que nos permitan definir los problemas.
No es necesario su aprendizaje, sino su comprensión, y aprehensión de
los principios básicos de utilización, pues son la base de necesaria para un posterior estudios adecuado. 1.1.- Introducción al Álgebra de Boole.
El álgebra de Boole se llama así debido a George Boole, quien la
desarrolló a mediados del siglo XIX, es también denominada como álgebra de la lógica, pues permite prescindir de la intuición y simplificar deductivamente afirmaciones lógicas más complejas. Está especialmente dirigida a manejar funciones lógicas, basada en el valor binario 1,0, en los valores lógicos cierto y falso.
El objetivo de este tema es manejar los postulados y teoremas del
álgebra de Boole como herramienta básica en el análisis y síntesis de circuitos digitales, posteriormente secuenciales, circuitos microprocesadores y ordenadores y autómatas programables.
Vamos pues a establecer los conceptos fundamentales (símbolos o
términos no definidos), para definir un conjunto de postulados que forman la base del álgebra, y constituir los teoremas fundamentales del álgebra de Boole a partir de los postulados.
Todas las funciones lógicas, que utilizamos en el Álgebra de Bolees, y
por ende en la automatización, inicialmente solo podrán tomar dos estados: • Cierto o falso. • Verdadero o falso. • 1 ó 0.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 10 -
Cuando estos valores básicos se implementan en elementos electrónicos, hidráulicos, etc.. se asocian por conveniencia con:
• Encendido apagado. • Conectado o desconectado. • Circula señal, ó circuito abierto. Etc..
La variables lógicas por tanto solo pueden tener dos valores; cierto y
falso, que al asignarle valores numéricos, por analogía habitual, se hacer equivaler a los valores “1” y “0”, y al utilizar circuitos eléctricos, electrónicos hidráulicos, neumáticos, etc.. se asigna el valor “1”, cierto, cuando tenemos tensión (en electrónica y electricidad, el valor es 5 voltios), en hidráulica y neumática, se asocia este valor a la circulación de fluido y existencia de presión.
Esta asignación es la habitual, y se denomina de lógica positiva, por
convenio, puesto que podría hacerse la asignación de valores contraria, es decir asociar tensión negativa de – 5 voltios al valor “1” ó cierto, y “0” voltios al valor falso, cosa que no se suele hacer, y en este caso sería de lógica negativa.
Las funciones que manejan variables lógicas, se denominan funciones
lógicas. Y pueden ser: • AND & Y + • OR O . • NOT NO A ( Nota: Para indicar negación de A usamos A´.
1.2.- Postulados.
Son el conjunto de reglas básicas que establecemos por condición, es decir que fijamos como reglas, indemostrables pero comprobables. Postulado1. Existe un conjunto M de elementos sujetos a una relación de
equivalencia denotada por el signo = que satisfacen el principio se sustitución.
Postulado 2.a. Para todas (A , B) en M, la función A + B es una operación
binaria (suma lógica simbolizada por & AND) significada por el signo +, tal que:
(A + B) está en M
A efectos matemáticos, el conjunto M es “cerrado” a esta operación.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 11 -
Postulado 2.b. Para toda (A , B) en M, se tiene que A . B es una operación binaria (producto lógico, simbolizada por . OR) significada con el signo ., y tal que:
(A . B) está en M Es decir, el conjunto M es cerrado a esta operación.
Postulado 3.a. Existe un elemento 0 en M, tal que: A + 0 = A para toda A en M.
Postulado 3.b. Existe un elemento 1 en M, tal que: A . 1 = A para toda A en M.
Postulado 4.a. Para toda (A , B) en M: A + B = B + A Se satisface la propiedad
conmutativa. Postulado 4.b. Para toda (A , B) en M: A . B = B . A Se satisface la propiedad
conmutativa.
Postulado 5.a. Para toda (A, B, C) en M: A + (B . C) = (A + B) . (A + C) Ley distributiva de la suma sobre el producto
Postulado 5.b. Para toda (A, B, C) en M: A . (B + C) = (A . B) + (A . C) Ley
distributiva del producto sobre la suma.
Postulado 6.a. Para todo elemento A en M, existe un elemento A', tal que: A + A' = 1
Postulado 6.b. Para todo elemento A en M, existe un elemento A', tal que:
A . A' = 0
Postulado 7. Existen por lo menos (A , B) en M, tal que: A es diferente de B.
A ≠ B
Se puede ya tener a estas alturas del tema, un atracón suficiente como para dejarlo, pero al fin y al cabo, trabajamos con elementos nuevos, funciones y variables distintas, que necesitan un nuevo Álgebra, y son postulados similares a los del Álgebra ordinaria, con algunas diferencias.
Todos los postulados se presentan por pares, pues existe una dualidad
entre los símbolos + y ., lo mismo que entre los valores “1” y “0”. Y conviene siempre recordar que todas estas funciones, variables A, A´, B, etc.. no son mas que valores “1” ó “0” según los casos.
Si el símbolo + se sustituye por . y . por +, y también cambiamos todos
los UNOS por CEROS y los CEROS por UNOS, en cualquiera de los postulados de cada par, el resultado es el otro postulado.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 12 -
A causa de esta dualidad fundamental, cada teorema que se presenta puede tener su dual, que se obtiene realizando el citado cambio, por tanto, la demostración de un teorema implica la validez de su teorema dual.
1.3 Teoremas fundamentales.
Veamos ahora los teoremas fundamentales del álgebra de Boole, que son la base del resto de los temas dedicados a la lógica binaria. Es posible demostrar dichos teoremas por cualquiera de los métodos de:
1. Algebraicamente, mediante postulados y teoremas ya demostrados. 2. Gráficamente, utilizando nuestros viejos amigos de EGB, los
diagramas de Venn.
3. Por inducción perfecta, usando las tablas de verdad, en las que definimos todos los valores del teorema hasta su comprobación.
Ahora usaremos el método algebraico, para practicar y empezar a
familiarizarnos con el Álgebra de Boole, demostrando solo los teoremas en su forma primaria, y luego aplicando las reglas de dualidad mencionadas anteriormente, se puede conseguir su forma dual.
En el desarrollo teórico en clase, solo se mencionan, dejando para el
alumno en su práctica, el seguimiento y comprobación paso a paso. Se indica entre paréntesis el postulado o Teorema empleado en cada
punto de la demostración.
Teorema 1. Teorema sobre la UNICIDAD.
1.a. El elemento 0 es único. 1.b. El elemento 1 es único.
Demostración de 1.a :
Por contradicción, se supone que 0 y 01 son neutros aditivos, por lo que deben satisfacer al postulado (P.3.a), es decir:
A + 0 = A y A1 + 01 = A1 Si A1 = 0 y A = 01 y como 0 es neutro, por suposición, entonces:
01 + 0 = 0 (1)
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 13 -
Además como 01 es neutro, por suposición, entonces:
0 + 01 = 0 (2)
De (1) y (2) se tiene: 01 = 0 con lo que se demuestra el teorema.
Teorema 2. Teorema sobre la EQUIPOTENCIA.
2.a. A + A = A 2.b. A . A = A
Demostración de 2.a.
A + A = (A + A) . 1 (P.3.b) A + A = (A + A) . (A + A') (P.6.a) A + A = A + (A . A') (P.5.a) A + A = A + 0 (P.6.b) A + A = A (P.3.a)
Teorema 3.
3.a. A + 1 = 1 3.b. A . 0 = 0
Demostración de 3.a.
A + 1 = 1 . (A + 1) (P.3.b) A + 1 = (A + A') . (A + 1) (P.6.a) A + 1 = A + (A' . 1) (P.5.a) A + 1 = A + A' (P.3.b.) A + 1 = 1 (P.6.a)
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 14 -
Teorema 4. Teorema de ABSORCIÓN.
4.a. A + (A . B) = A 4.b. A . (A + B) = A
Demostración de 4.a.
A + (A . B) = (A . 1) + (A . B) (P.3.b) A + (A . B) = A . (1 + B) (P.5.b) A + (A . B) = A . 1 (T.3.a) A + (A . B) = A (P.3.b)
Teorema 5. El elemento A' es único.
Demostración. Por contradicción, supóngase que existen dos elementos distintos A'1 y A'2, tales que satisfacen los postulados P.5.a. y P.5.b., es decir:
A + A'1 = 1 y A + A'2 = 1 A . A'1 = 0 y A . A'2 = 0
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 15 -
Teorema 6. Para toda A en M, A = A'' Demostración
Sea A'' = X, por tanto:
A' + X = 1 y A' , X = 0 (P.6) Pero:
A' + A = 1 y A' . A = 0 (P.6)
Así que tanto X como A' satisfacen el postulado P.6. como el complemento de A, por tanto:
X = A, es decir, A'' = A Teorema 7. Teoremas de ABSORCIÓN.
7.a. A . [(A + B) + C] = [(A + B) + C] . A = A 7.b. A + [(A . B) . C] = [(A . B) . C] = A
Demostración de 7.a. A . [(A + B) + C] = A . (A + B) + (A . C) (P.5.b) A . [(A + B) + C] = (A . A) + (A . B) + (A . C) (P.5.b) A . [(A + B) + C] = A + (A . B) + (A . C) (T.2) A . [(A + B) + C] = A . (1 + B + C) (P.5.b) A . [(A + B) + C] = A . 1 (T.3) A . [(A + B) + C] = A (P.3.b)
Teorema 8. Teorema sobre la ASOCIACIÓN.
8.a. A + (B + C) = (A + B) + C 8.b. A . (B . C) = (A . B) . C
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 16 -
Demostración de 8.a. Sea: Z = [(A + B) + C] . [A + (B + C)] Z = {A . [(A + B) + C]} + {(B + C) . [(A + B) + C]} (P.5.b) Z = A + {(B + C) . [(A + B) + C]} (T.7) Z = A + {B . [(A + B) + C] + C . [(A + B) + C]} (P.5.b) Z = A + {B + C . [(A + B) + C]} (T.7) Z = A + (B + C) (T.7) (1)
Como: Z = [(A + B) + C] . [A + (B + C)]
Z = {(A + B) . [A + (B + C)]} + {C . [A + (B + C)]} (P.5.b.) Z = {(A + B) . [A + (B + C)]} + C (T.7) Z = {A . [A + (B + C)] + B . [A + (B + C)]} + C (P.5.b) Z = {A . [A + (B + C)] + B} + C (T.7) Z = (A + B) + C (T.7.) (2)
Por consiguiente, de (1) y (2) y por transitividad:
Z = A + (B + C) = (A + B) + C = A + B + C Teorema 9. Teoremas sobre la COMPLEMENTACIÓN.
9.a. A + (A' . B) = A + B 9.b. A . (A' + B) = A . B
Demostración de 9.a. A + (A' . B) = (A + A') . (A + B) (P.5.a) A + (A' . B) = 1 . (A + B) (P.6.a) A + (A' . B) = A + B (P.3.b)
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 17 -
Teorema 10. Teorema de DeMORGAN. 10. a. (A + B)'' = A' . B' 10.b. (A . B)' = A' + B'
Demostración de 10.a.
(A + B) + (A' . B') = [(A + B) + A'] . [(A + B) + B'] (P.5.a) (A + B) + (A' . B') = [A' + (A + B)] . [(A + B) + B'] (P.4.a) (A + B) + (A' . B') = [(A' + A) + B] . [A + (B + B')] (T.8) (A + B) + (A' . B') = (1 + B) . (A + 1) (P.6.a) (A + B) + (A' . B') = 1 . 1 (T.3.a) (A + B) + (A' . B') = 1 (T.2.b) (1)
Además tenemos que:
(A + B) . (A' . B') = (A' . B') . (A + B) (P.4.b) (A + B) . (A' . B') = (A' . B' . A) + (A' . B' . B) (P.5.b) (A + B) . (A' . B') = 0 + 0 (P.6.b) (A + B) . (A' . B') = 0 (T.2.a) (2)
Y ahora de (1) y (2) se concluye que:
(A + B)' = A' . B'
Teorema 11.
11.a. (A . B) + (A' . C) + (B . C) = (A . B) + (A' . C) 11.b. (A + B) . (A' + C) . (B + C) = (A + B) . (A' + C)
Demostración de 11.a. (A . B) + (A' . C) + (B . C) = (A . B . 1) + (A' . 1 . C) + (1 . B . C) = (P.3.b) = [A . B . (C + C')] + [A' . (B + B') . C] + [(A + A') . B . C ] = (P.6.b)
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 18 -
= (A B C) + (A B C') + ( A' B C) + (A' B' C) + (A B C) + (A' B )= (P.5.b) = (A B C) + (A B C') + ( A' B C) + (A' B' C) = (T.2) = [A . B . (C + C')] + [A' . C . (B + B')] = (P.5.a) = (A . B . 1) + (A' . C . 1) (P.6.a) (A . B) + (A' . C) + (B . C) = (A . B) + (A' . C) (P.3.b) Teorema 12.
12.a. (A . B) + (A . B' . C) = (A . B) + (A . C) 12.b. (A + B) . (A + B' + C) = (A + B) . (A + C)
Demostración de 12.a.
(A . B) + (A . B' . C) = A . [B + (B' . C)] (P.5.b) (A . B) + (A . B' . C) = A . [(B + B') . (B + C)] = A . (B + C) (T.9.a) (A . B) + (A . B' . C) = (A . B) + (A . C) (P.5.b) Teorema 13.
13.a. (A . B) + (A . B') = A 13.b. (A + B) . (A + B') = A
Demostración de 13.a.
(A . B) + (A . B') = A . (B + B') (P.5.b)
(A . B) + (A . B') = A . 1 (P.6.b)
(A . B) + (A . B') = A Estos postulados y teoremas, conviene conocerlos y comprenderlos, pues constituyen la base para el estudio de la automática. Pero los programas de ayuda, simulación, programación, etc.. si los “saben” y son capaces de utilizarlos, simularlos etc.. Así pues señalamos donde encontrarlos, y donde volver a mirarlos siempre que nos haga falta. Hoy en día los procedimientos de diseño ayudan a realizar estos diseños de manera asistida por ordenador.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 19 -
RESUMEN TEOREMA DIRECTO DUAL DEL TEOREMA T.1.a. 0 es único
T.1.b. 1 es único
T.2.a A + A = A
T.2.b A . A = A
T.3.a. A + 1 = A
T.3.b A . 0 = 0
T.4.a. A + (A . B) = A
T.4.b A . (A + B) = A
T.5. A' es único
No tiene
T.6. A = A''
No tiene
T.7.a. A . [(A + B) + C] = [(A + B) + C] . A = A
T.7.b. A + [(A . B) . C] = [(A . B) . C] + A = A
T.8.a. A + (B + C) = (A + B) + C
T.8.b. A . (B . C) = (A . B) . C
T.9.a. A + (A' . B) = A + B
T.9.b. A . (A' + B) = A . B
T.10.a. (A + B)' = A' . B'
T.10.b. (A . B)' = A' + B'
T.11.a. (A . B) + (A' . C) + (B . C) = (A . B) + (A' .C )
T.11.b. (A + B)(A' + C)(B + C) = (A + B)(A' + C)
T.12.a. (A . B) + (A . B' . C) = (A . B) + (A . C)
T.12.b. (A + B)(A + B' + C) = (A + B) (A + C)
T.13.a. (A . B) + (A . B') = A
T.13.b. (A + B) . (A + B') = A
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 20 -
1.4 Funciones lógicas. Tablas de Verdad. Las variable que utilizamos en el Álgebra de Boole son variables
discretas que puede tener sólo dos valores. Una función lógica de dos o más variables, es una variable binaria cuyo valor depende de los valores de las variables de conmutación.
Las nombramos en la forma f(A, B, C,...). En que las variables A, B, C,..., son variables independientes. f es la función dependiente.
El valor de una función lógica depende del valor de sus variables independientes, como siempre, y para n variables, el número de combinaciones posibles es 2n.
Si escribimos en una tabla con tantas entradas como variables independientes, y tantas salidas como funciones dependientes, estamos escribiendo la tabla de verdad.
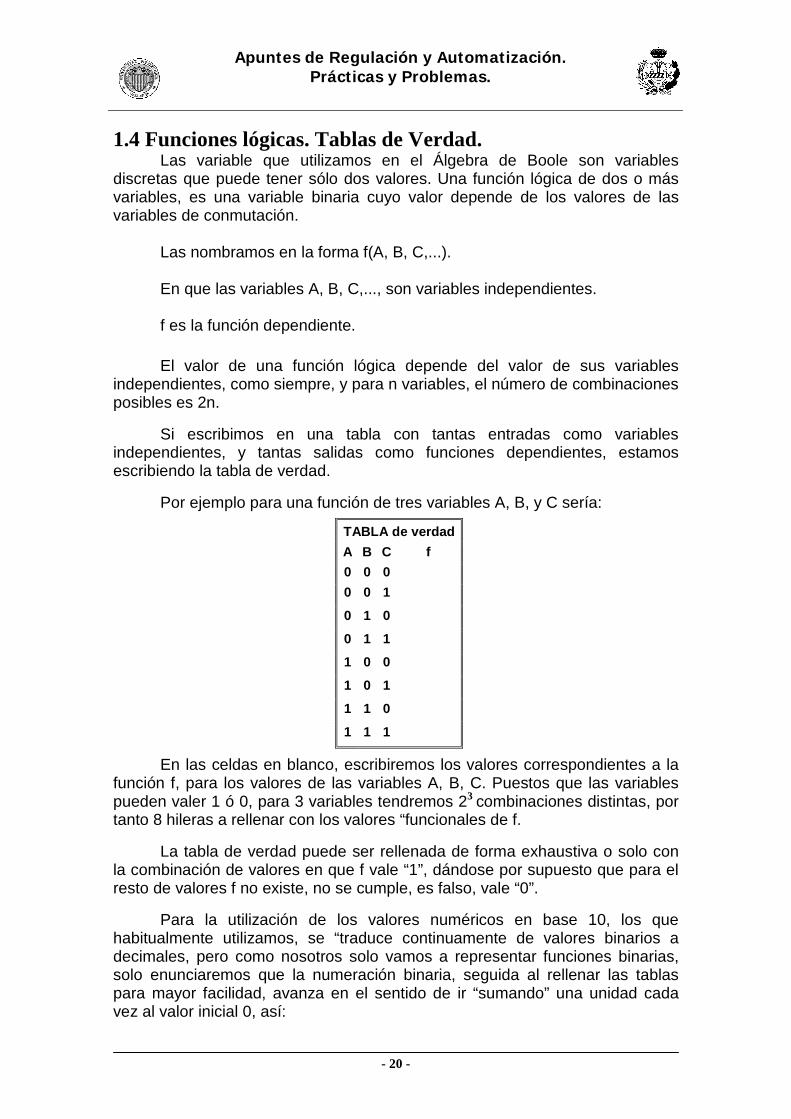
Por ejemplo para una función de tres variables A, B, y C sería:
TABLA de verdad A B C f 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
En las celdas en blanco, escribiremos los valores correspondientes a la función f, para los valores de las variables A, B, C. Puestos que las variables pueden valer 1 ó 0, para 3 variables tendremos 23 combinaciones distintas, por tanto 8 hileras a rellenar con los valores “funcionales de f.
La tabla de verdad puede ser rellenada de forma exhaustiva o solo con la combinación de valores en que f vale “1”, dándose por supuesto que para el resto de valores f no existe, no se cumple, es falso, vale “0”.
Para la utilización de los valores numéricos en base 10, los que habitualmente utilizamos, se “traduce continuamente de valores binarios a decimales, pero como nosotros solo vamos a representar funciones binarias, solo enunciaremos que la numeración binaria, seguida al rellenar las tablas para mayor facilidad, avanza en el sentido de ir “sumando” una unidad cada vez al valor inicial 0, así:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 21 -
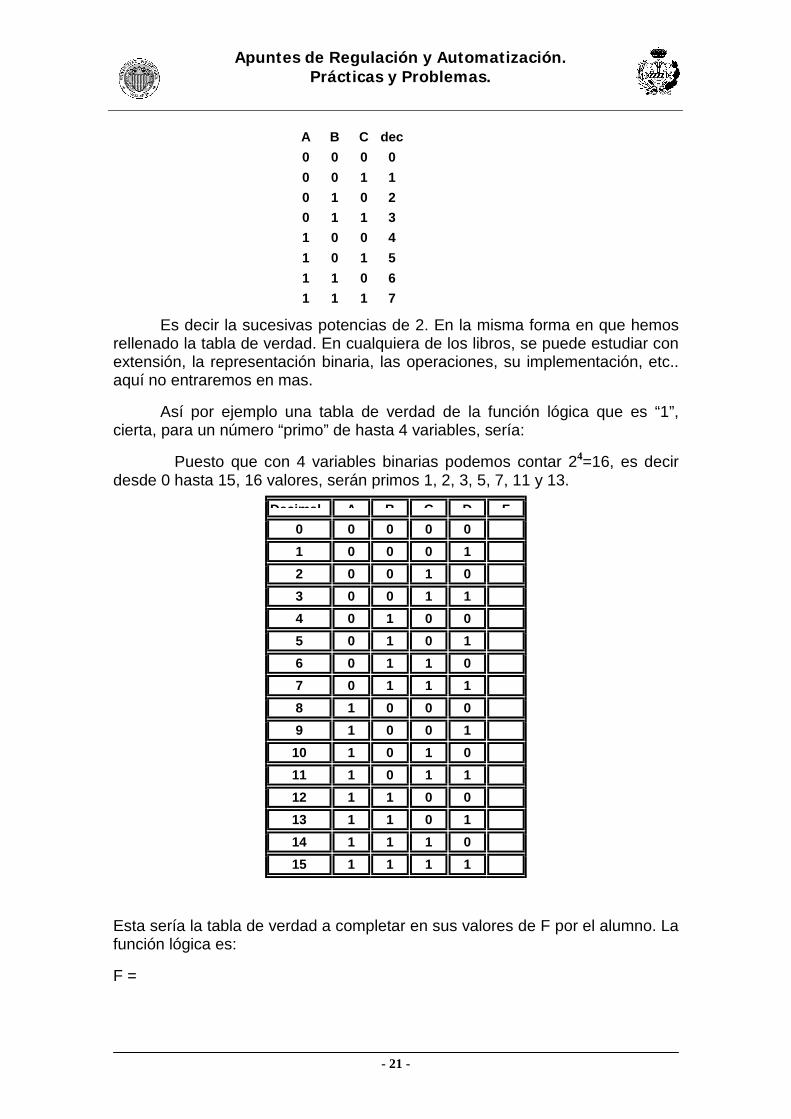
A B C dec 0 0 0 0 0 0 1 1 0 1 0 2 0 1 1 3 1 0 0 4 1 0 1 5 1 1 0 6 1 1 1 7
Es decir la sucesivas potencias de 2. En la misma forma en que hemos rellenado la tabla de verdad. En cualquiera de los libros, se puede estudiar con extensión, la representación binaria, las operaciones, su implementación, etc.. aquí no entraremos en mas.
Así por ejemplo una tabla de verdad de la función lógica que es “1”, cierta, para un número “primo” de hasta 4 variables, sería:
Puesto que con 4 variables binarias podemos contar 24=16, es decir desde 0 hasta 15, 16 valores, serán primos 1, 2, 3, 5, 7, 11 y 13.
Esta sería la tabla de verdad a completar en sus valores de F por el alumno. La función lógica es:
F =
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 22 -
1.5. Puertas Lógicas. Todas las funciones tiene su “traducción” en símbolos o “iconos” para representarlos, mediante combinaciones de estos símbolos, incluso muchos programas los imitan para poderlos utilizar directamente solo nombrándolos. En la siguiente tabla se presentan los símbolos gráficos, su función y la tabla de verdad correspondientes.
Puerta Lógica SÍMBOLO FUNCIÓN TABLA DE VERDAD
A F 0 1 INVERSOR
F = A' 1 0
A B F 0 0 0 0 1 0 1 0 0
Y
F = A . B F =( A´+ B´ ) ´
1 1 1 A B F 0 0 0 0 1 1 1 0 1
O
F = A + B
F = ( A´ . B´ ) ´ 1 1 1 A B F 0 0 1 0 1 1 1 0 1
No Y
F = (A . B)'
F = A' + B' 1 1 0 A B F 0 0 1 0 1 0 1 0 0
No O
F = (A + B)'
F = A' . B' 1 1 0
A B F 0 0 0 0 1 1 1 0 1
O EXCLUSIVA
F = A.B' + A'.B
1 1 0 A B F 0 0 1 0 1 0 1 0 0
No O EXCLUSIVA
F = A.B + A'.B'
1 1 1
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 23 -
Estos símbolos se utilizan también en algunas delas representaciones de automatismos simples.
Así por ejemplo para un sistema representado por la función:
F( A, B, C ) = A' B' + A B +A B' C = A' B' C+ A' B' C´+ A B C+ A B C´+ A B' C Podemos representarlo mediante la tabla de verdad
Term A B C FA' B' C' 0 0 0 A' B' C 0 0 1
0 1 0 0 1 0 0 1 1 1 0 0
A.B'.C 1 0 1
A.B.C´ 1 1 0
A.B.C 1 1 1
Y podemos dibujar un diagrama de funciones lógicas que los represente:
Cualquier circuito lógico se reduce según criterios, menor número de funciones, de términos, de circuitos distintos etc..., bien usando los postulados o Teoremas anteriores, programas automáticos, o diagramas de reducción.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 24 -
Propuesta: Escribir la tabla de verdad de la función lógica
F(X,Y,Z) = Y Z' + X' Z
X Y Z F0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0
1 1 1
Propuesta: Escribir la tabla de verdad de la función lógica
F(A,B,C) = A'.C + B' C'´
A B C F0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0
1 1 1
Propuesta: Escribir la tabla de verdad de la función lógica de 3 variables de los números pares mayores de 3.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 25 -
1.6 Simplificación de funciones lógicas.
Empecemos con algunas definiciones, que conviene conocer. La representación en forma de tabla de verdad se denomina
representación canónica, en función de que la función contiene todos los posibles términos, con todas las variables.
Mediante la forma de escritura A representamos una variable, y con A', su complemento. Lo escribimos de forma “literal”. Llamamos termino producto a los literales relacionados con la operación producto . (función OR), así A.B.D'. Llamamos término suma al conjunto de literales relacionadas por la operación suma +, (función lógica AND), así A+B+D' Llamamos termino canónico, y a la función representada mediante términos canónicos, la llamamos función canónica, si tiene tantos literales como 2n siendo n el número de variables. Y en función de esto, • Producto canónico ó minitérmino, a A.B.C, A.B.C' (de 3 variab.) • Suma canónica o maxitérmino, a A+B+C, A'+B+C, (3 variables) Llamamos forma de suma de productos a una suma de términos producto (minitérminos) de una función.
F(A,B,C) = SUMAminitérminos ( ) = SUMAm ( ) F(A,B,C) = (A . B . C) + (A . B . C') + (A' . B . C)
Llamamos forma de productos de sumas a un producto de términos suma (maxitérminos) de una función. F(A,B,C) = PRODUCTOMAXITÉRMINOS ( ) = PRODUCTOM ( ) Llamamos forma canónica de una función a aquella en que todos los términos son canónicos y aparecen una sola vez. Se tienen dos formas:
• Suma de productos canónicos o suma de minitérminos.
F( ) = SUMAm ( )
• Producto de sumas canónicas o producto de maxitérminos.
F( ) = PRODUCTOM ( )
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 26 -
Por ejemplo en una tabla de 3 variables X, Y, Z escribimos los mini términos y los maxi términos.
Propuesta: En las funciones binarias, como comprobación si hay o no errores, se utiliza un indicador de paridad, se dice que la paridad es par, y la función valdrá uno, si el número de “1” es par. Escribir la tabla de verdad, y la suma de productos, de mini terminos de dicha función, para 3 variables A, B, C.
De cualquier tabla de verdad, debemos probar a obtener algún tipo de reducción, aplicando los postulados y teoremas enunciados, por ejemplo en el caso anterior es fácilmente reducible sacando factor común C:
F = C ( A' B + A B' )
Función algo mas sencilla de escribir y de implementar con circuitos ó lógica, aunque se pierde el concepto de mini y maxi términos, se ha de utilizar circuitos lógicos “no básicos”. Vamos estudiar un método de reducción “manual”, útil desde el punto de vista didáctico y fácil de usar. Existe un equivalente de realización manual mas compleja, pero implantado en programas informáticos, el denominado de Q-McCluskey. Hoy en día su interés principal es en ambos casos didáctico.
Vamos a estudiar el método de reducción sistemática denominado de Diagramas de Karnaught.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 27 -
1.7. Simplificación de funciones lógicas. Mapas de Karnaugh.
En el punto anterior se obtenía la función lógica de la tabla de verdad, dependiendo del número de términos que tenía la función canónica, y siendo el número de puertas lógicas utilizadas, igual al número de términos obtenidos “mas uno”, pero el circuito obtenido no son los más sencillos ni los más económicos.
El método utilizado, para la minimización de funciones booleanas anteriormente, es algebraico, para ello se usan los postulados y teoremas del álgebra de Boole, pero ese método es complicado de usar, puesto que depende de “acordarse de los postulados”, y se desarrollaron procedimientos mas o menos sencillos y exhaustivos.
En multitud de bibliografía se desarrollan métodos de simplificación en función de: funciones lógicas, número de circuitos, número de relés, etc..
El mas simple a la vez que básico, es el que usa el método gráfico de diagramas de Karnaugh. Se considera como la forma gráfica de una tabla de verdad o una extensión del diagrama de Venn, de ahí su sencillez.
1.7.1. Construcción de diagramas, mapas de Karnaugh.
Empecemos por considerar para los casos mas sencillos de 2 y 3 variables.
Comenzamos por construir el mapa, para ello construimos una tabla de dos entradas, y en total con tantas celdas como términos en la tabla de verdad que queremos simplificar. Por ejemplo para dos variables una tabla de 2 x 2.
La primera fila y la primera columna comienza en “0” y sigue con “1”. Por tanto al rellenar la tabla de verdad el orden de rellenado de la tabla sería:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 28 -
Observar que al escribir los valores de A y B, se empieza por cero y continua con 1. Para el caso de 3 variables se puede distribuir dos variables en vertical y una en horizontal o viceversa, el resultado será el mismo.
Para las líneas con dos variables, empieza por cero, y luego 1, “reflejamos “ estos dos valores, 1 y 0 y por último añadimos 0 a los dos primeros y 1 a los dos.
El orden de rellenado parece algo extraño pero para la posterior utilización es necesario así, pues sigue el orden tal que “de una línea a la siguiente, la numeración binaria solo cambia un bit, solo cambia cada vez el valor de una variable.
Si disponemos tres variables en el diagrama, en forma 1 por 2, el cuadro sería:
Y por último para cuatro variables ABCD
Hemos construido el cuadro de la misma manera, reflejando los bits en cada línea. Podemos proponernos mapas de 5 o 6 variables, pero eso complicaría nuestro objetivo de introducir el tema, y además los mapas de Quiney-McCluskey pueden resolverlo ayudándose del ordenador.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 29 -
Trasladamos la tabla de la verdad correspondiente, al diagrama de Karnaught, rellenándolo según los mini términos indicados. Una vez trasladado, retomamos la idea inicial de simplificación, en la que podemos eliminar y simplificar variables. Como puntos principales a la hora de realizar el diagrama recordar que:
- Escribir en el diagrama las variables en el mismo orden que la tabla.
- Distribuir variables uniformemente en filas y columnas.
- Numerar filas y columnas reflejando los bits, de menor a mayor peso.
- De cada fila a la siguiente, solo puede cambiar “un bit”.
- De cada columna a la siguiente, solo puede cambiar “un bit”.
1.7.2 Simplificación mediante mapas de Karnaugh. El mapa se utilizará para la minimización de funciones lógicas de cualquier número de variables, aunque ahora por ejemplo se use con tres ó cuatro, los pasos a seguir serán los mismos para cualquier mapa, no importa cual sea el número de variables. El procedimiento a seguir es:
De la definición del problema se escribe la tabla funcional, de la verdad, con lo que se obtiene la función canónica.
Se podría realizar por mini o maxi términos, nos limitaremos a mini términos de la tabla, se trasladan al mapa de K., y se coloca un 1 en la “celda” correspondiente al mini término (sería un 0 si es maxi término, pero no lo usaremos).
Se realizan las uniones de celda en número siempre de una potencia de 2, es decir, 1, 2, 4, 8, 16, 32, etc.., abarcando el mayor número de celdas o mini términos bajo los siguientes criterios:
a) El número de términos que se enlazan (agrupan) deben seguir la regla de formación binaria, es decir, de 1 en 1, de 2 en 2, de 4 en 4, de 8 en 8, y deberán ser tal que..
b) Por cada conjunto elegido, se eliminan tantas variables como la potencia de dos del número de términos agrupados, es decir: 1 = 20 = 0 variables no elimina.
2 = 21 = 1 variable se elimina.
4 = 22 = 2 variables se eliminan.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 30 -
c) Los mini términos (celdas) que se pueden agrupar deben ser simétricos con los ejes centrales y secundarios, que se indican el cuadro. O lo que es lo mismo adyacentes en alguno de los lados.
d) El que se haya tomado un término para una agrupación, no impide que éste mismo se pueda utilizar para otros enlaces si así se consiguen funciones mas sencillas.
e) La recolección de mini términos debe ser exhaustiva, se deben recoger todos los mini términos.
f) La función reducida tendrá tantos términos como enlaces se hayan realizado, compuestos de tantas variables como el total de las usadas, menos las eliminadas según el término c) anterior.
g) Para obtener todos los términos reducidos se realizan dos movimientos sobre el mapa, uno vertical, que barre a las variables más significativas y otro horizontal, que barre a las variables menos significativas.
Algunos ejemplos de agrupación en la tabla de tres variables.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 31 -
Para cuatro variables el procedimiento es similar nada mas que tenemos mas posibilidades de reunión tanto de 2como de 4.
1.8 1.8 Sistemas combinacionales y secuenciales
Se define como sistema combinacional, al que diseñamos mediante una función lógica, y que su salida en cualquier instante solo depende de los valores presentes en ese mismo instante en sus entradas.
Eso tiene como consecuencia, la limitación en las posibilidades del circuito, pero a cambio son sistemas muy sencillos de implementar, y muy rápidos.
Su característica fundamental, es su independencia del tiempo, las señales de entrada dadas, producirán esa salida en cualquier instante en que se produzca, independientemente del instante considerado, pero el sistema es incapaz de “acordarse” de nada, pues en cuanto desaparezcan las entradas, desaparecerás las señales de salida.
No dependen de ninguna magnitud temporal a diferencia de los secuenciales que si que dependen.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 32 -
Un circuito combinacional es la implementación física de una función lógica, que se puede realizar mediante:
- Cableado de conexiones y circuitos lógicos, mediante los circuitos electrónicos que realizan esas funciones lógicas.
- Mediante la implementación en autómatas programables, ó en algún lenguaje de programación para ordenador o microcontrolador, pues todos los soportan y lo admiten.
Un circuito secuencial es aquel en que las entradas van entrando sucesivamente, en “secuencia”, es aquel que la señal de salida en el instante t + ∆t, dependerá de las entradas en el instante t y de las salidas que se han
producido en el instante t y ó anteriores.
El esquema ha cambiado sustancialmente, pues ahora existe realimentación entre la salida y la entrada, pues algunas salidas que se han ido produciendo, en instantes anteriores, o en el actual, son utilizadas para elaborar la información de salida actual.
Un dato fundamental a tener en cuenta es que ahora disponemos de memoria, pues al poder acordarse de valores de salida anteriores, podemos utilizarlo como “almacén” de los valores que se han ido produciendo.
La implementación de los circuitos secuenciales puede realizarse mediante circuitos lógicos biestables, es decir capaces de tener y almacenar dos posibles estados, “1” y “0”, además de los mismos circuitos lógicos vistos anteriormente, básicamente biestables T, D, J-K, cada uno de ellos con una tabla de verdad, al igual que las puertas anteriores
Dada la brevedad de esta introducción nosotros pasaremos a implementarlos directamente en los sistemas lógicos programables PLC, en el tema siguiente veremos las condiciones de obtención de sus funciones lógicas, implementación etc...
Por ahora realizaremos algunos ejemplos sencillos que podemos implementar tanto con funciones lógicas simples, como con PLC.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 33 -
Ejemplo.1.- Diseñar un circuito lógico combinatorio que detecte, mediante un “uno” en su salida, los números pares para una combinación de 3 variables de entrada. El número cero, por ejemplo esta vez no lo consideramos, entre lo números pares.
En función de esta tabla, rellenamos el diagrama de Karnaught.
En la tabla realizamos las uniones de los mini términos, según lo señalado en la tabla:
Observamos en la tabla que se pueden formar dos grupos de dos variables, en uno de los casos recogemos dos veces un mini término.
Como hemos recogido en un grupo lo mini términos:
A´ B C´+ A B C´ que en la tabla corresponde a: 1 0 y 1 1 0 se ve que al unir la variable A es “0” y “1”
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 34 -
Por tanto equivale a un término B C´
Para el otro grupo A B´C´ y A B C´ luego cambia B y se elimina,
Quedando A C´
La función de la salida ya reducida es Q = B C´ + A C´
En este como en otros casos, se puede reducir aun mas sacando factor común el término C´, con lo que se reduce la complejidad de la función, pero no el número de términos.
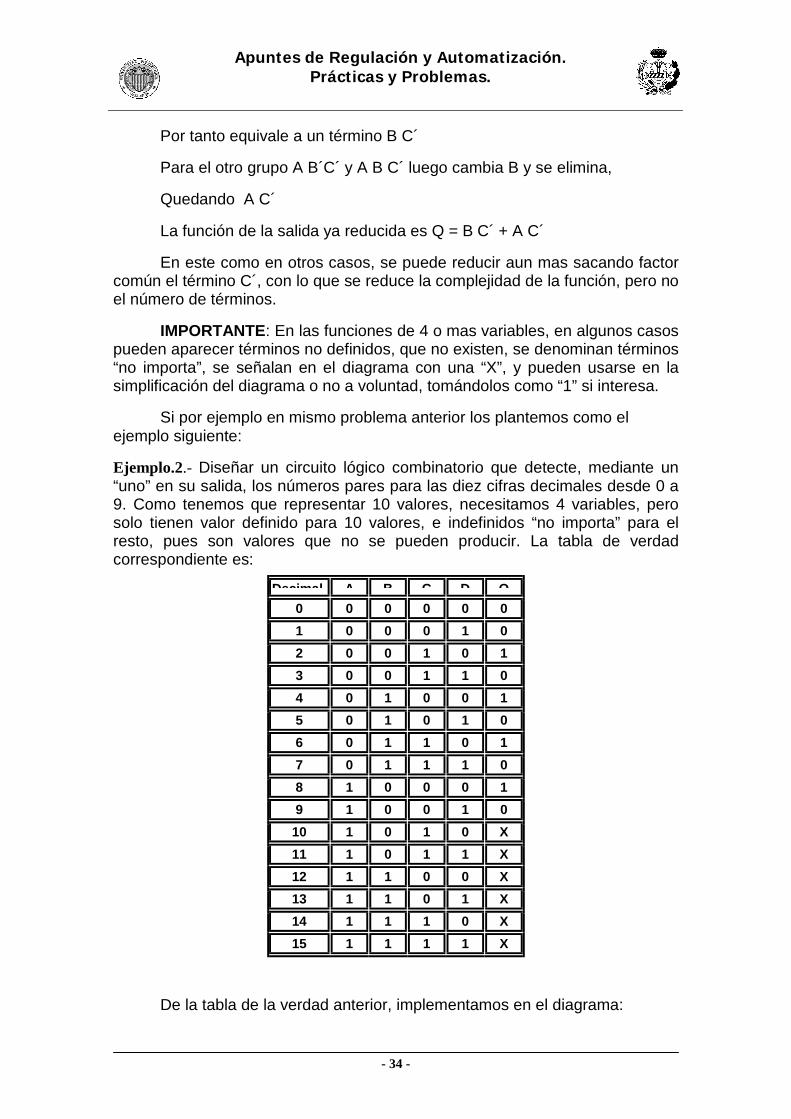
IMPORTANTE: En las funciones de 4 o mas variables, en algunos casos pueden aparecer términos no definidos, que no existen, se denominan términos “no importa”, se señalan en el diagrama con una “X”, y pueden usarse en la simplificación del diagrama o no a voluntad, tomándolos como “1” si interesa.
Si por ejemplo en mismo problema anterior los plantemos como el ejemplo siguiente:
Ejemplo.2.- Diseñar un circuito lógico combinatorio que detecte, mediante un “uno” en su salida, los números pares para las diez cifras decimales desde 0 a 9. Como tenemos que representar 10 valores, necesitamos 4 variables, pero solo tienen valor definido para 10 valores, e indefinidos “no importa” para el resto, pues son valores que no se pueden producir. La tabla de verdad correspondiente es:
De la tabla de la verdad anterior, implementamos en el diagrama:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 35 -
A C D´
A´ B D´
A B´ C´ D´
Y esta sería la tabla de verdad correspondiente, a la tabla de verdad, estrictamente considerada.
Y la función reducida sería la “unión” de los términos reducidos.
Q = A B´D´ + A´B D´ + A C D´
Si interesa podemos sacar factor común la variable D´.
Ahora bien, podemos rellenar la tabla con términos no importa, puesto que estamos seguros que no se puede producir, el que aparezca en esas variables esa combinación de valores de variables.
A´C D´
B D´
A D´
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 36 -
Vemos que podemos realizar una simplificación mayor.
Pero siempre ha de considerarse la posibilidad de uso en función de que existan o no esos posibles valores “no importan”. Y por supuesto si no se está seguro, no se pueden usar, y “no vale“ usarlos después y ver que ocurre.
Ejemplo 3. Cobrador de peaje.
Se desea diseñar un cobrador de peaje solo con monedas y bajo ciertas condiciones, denominadas de importe exacto, y en este caso de monedas exactas. Por estos puntos pueden pasar los vehículos que cumplan esas condiciones. Diseñar el sistema combinacional que “cuente” la cantidad de monedas que han sido colocadas en el colector. Si el pago es de 3 euros, solo se admiten monedas de 1 € o 2 €, de tal manera que las monedas caen por una ranura las de 1€ y por otra se desvían las de 2, de tal manera que tiene que haber 3 de 1€ o 1 de 1€ y otra de 2€, tal como el gráfico indica. Si es correcto se enciende una luz de pasa (color verde) y se envía una señal al colector para recolectar las monedas, “a la caja”, y en otro caso la luz de alto (color rojo) sigue encendida. Es obvio que si las monedas son menores, no caen por la rampa, se desvían, y si caen mas, no importa si hay 2 de 2 € y 2 de 1 €, no devuelve.
El esquema sería:
Por tanto la tabla de verdad tiene debe tener 4 variables de entrada, correspondiente a los sensores, ABCD, en que se sitúan las monedas en reposo para ser contadas, por eso la presencia de monedas suficientes, pues el ancho de canal de entrada y un contrapeso rechaza las monedas que no corresponde, cuando se sitúan las correctas, una salida de encendido de luz verde y recolección de monedas se activa, y mientras tanto una salida da luz roja y no recolectará.
Se puede complicar aún mas, pero un sistema sencillo y fiable puede ser suficiente.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 37 -
De acuerdo con ello, la tabla correspondiente sería:
Las situaciones en que se activan los sensores de las variables, según pasan las monedas, no se consideran mas que como permanecer en el estado anterior para no abrir la barrera, y no poner la luz verde ni recolectar, pues al considerarlos no importa podría activarse la barrera antes, son ahora situaciones que si se pueden producir temporalmente.
Por supuesto si hay monedas de mas, no se devuelve, y se admite el coche, o simplemente podrían ir a la salida de devolución por un contrapeso mecánico. Implantamos QV en el diagrama:
Decimal A B C D Q V Q R0 0 0 0 0 0 1 1 0 0 0 1 0 1 2 0 0 1 0 0 1 3 0 0 1 1 1 0
no 1 0 0 0 0 1 no 1 0 0 1 0 1 no 1 0 1 0 0 1 no 1 0 1 1 0 1 no 1 1 0 0 0 1
no 1 1 0 1 0 1 3 1 1 1 0 1 0 5 1 1 1 1 1 0
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 38 -
La función resultante es:
QV = A´ B C + A B C
QR = QV´
Por supuesto si hay monedas de mas, no se devuelve, y se admite el coche, o simplemente podrían ir a la salida de devolución por un contrapeso mecánico. Implantamos QV en el diagrama:
Ejemplo 4. Contador digital.
Cuenta según los valores de un registro de 3 bits. El contador cuenta desde 0 = [0 0 0] hasta 7 = [1 1 1], se pone a cero y empieza la cuenta nuevamente. Este contador es usado, como se muestra en el diagrama a bloques adjunto, para generar tres señales de control, C1, C2 y C3.
Estas señales toman un valor de 1, de acuerdo con las siguientes condiciones:
C1 = 1 para una cuenta de 0, 1, 3, 5 y 7
C2 = 1 para una cuenta de 0, 3, 5 y 6
C3 = 1 para una cuenta de 0, 3, 4 y 7
Diseñe un circuito lógico combinacional que genere C1, C2 y C3.
La tabla de la función es :
X 3 X 2 X 1 C 1 C 2 C 30 0 0 1 1 1 0 0 1 1 0 0 0 1 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 1 1 0 1 1 1 0 1 1 0 0 1 0 1 1 1 1 0 1
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 39 -
Para este caso las condiciones del problema definen qué valores de entrada dan a la función de salida un valor de 1; es decir, los minitérminos asociados a cada función de salida. Sin embargo, por procedimiento, siempre es conveniente realizar la tabla funcional.
Funciones lógicas de la variable de salida:
C1(X3,X2,X1) = Suma mini términos (0,1,3,5,7)
C2(X3,X2,X1) = Suma mini términos (0,3,5,6)
C3(X3,X2,X1) = Suma mini términos (0,3,4,7)
La figura muestra los mapas de Karnaugh para C1, C2 y C3.
De los mapas K, se obtienen las funciones reducidas siguientes:
Que podríamos implementar mediante un circuito lógico como el de la figura siguiente:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 40 -
Aunque son difíciles de realizar por su magnitud, y muy complejos para principiantes, podemos proponernos un caso de 5 variables.
Ejemplo 5. Hay 5 personas que actúan como jueces en una competición de esgrima. El voto de cada uno de ellos se indica con un 1 tocado, o 0 no tocado claro. Las 5 señales van a la entrada del sistema combinacional, y las reglas de la competición exigen que solo se acepta como tocado si el voto es 4-1 o 5-0 favorable, es un tocado, mientras que 3-2 0 2-3 debe continuar la competición, y 4-1 o 5-0 en contra, no se acepta el tocado y deben comenzar en posición de partida. Las indicaciones mediante dos luces X e Y las dos a 1, se da un tocado, X Y = 0 0 no hay tocado y comienza de partida y continua el comate si XY = 10. Diseñe un circuito mínimo de suma de productos.
La siguiente tabla agrupa las condiciones del enunciado:
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 41 -
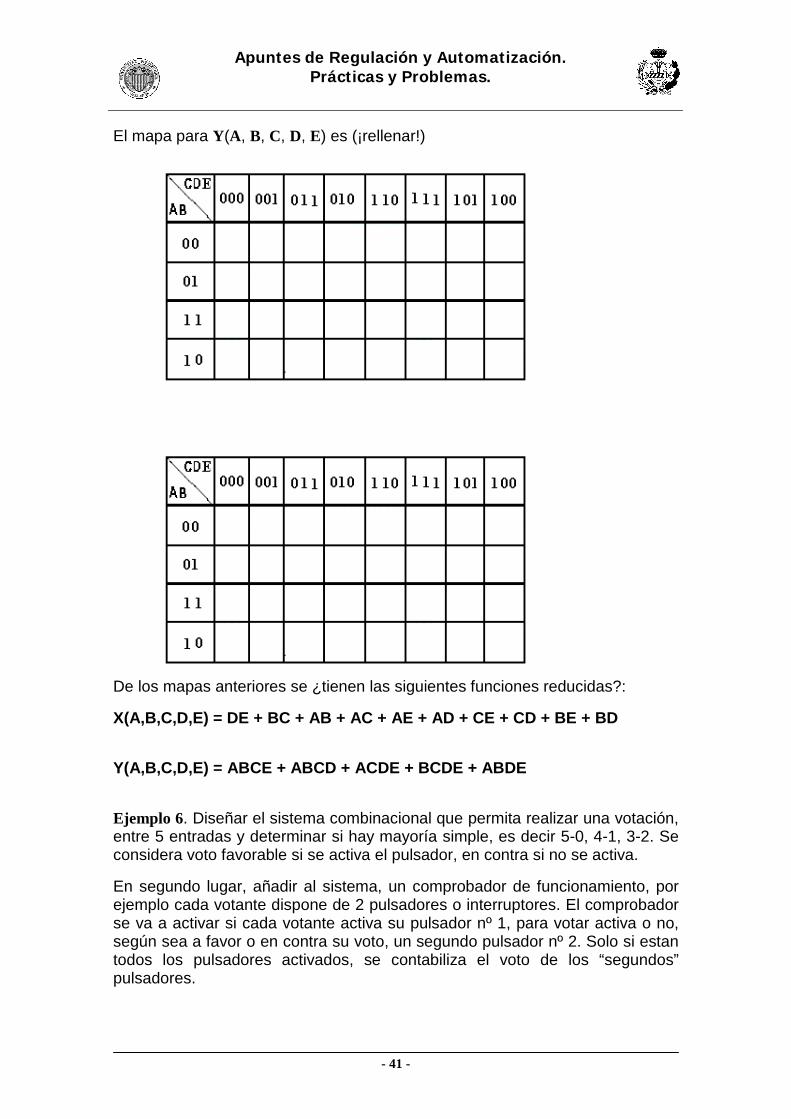
El mapa para Y(A, B, C, D, E) es (¡rellenar!)
De los mapas anteriores se ¿tienen las siguientes funciones reducidas?:
X(A,B,C,D,E) = DE + BC + AB + AC + AE + AD + CE + CD + BE + BD
Y(A,B,C,D,E) = ABCE + ABCD + ACDE + BCDE + ABDE
Ejemplo 6. Diseñar el sistema combinacional que permita realizar una votación, entre 5 entradas y determinar si hay mayoría simple, es decir 5-0, 4-1, 3-2. Se considera voto favorable si se activa el pulsador, en contra si no se activa.
En segundo lugar, añadir al sistema, un comprobador de funcionamiento, por ejemplo cada votante dispone de 2 pulsadores o interruptores. El comprobador se va a activar si cada votante activa su pulsador nº 1, para votar activa o no, según sea a favor o en contra su voto, un segundo pulsador nº 2. Solo si estan todos los pulsadores activados, se contabiliza el voto de los “segundos” pulsadores.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 42 -
Ejemplo 7. Se desea diseñar un circuito lógico combinatorio de 2 salidas y 2 entradas que efectúe sumas en módulo 4 (suma en paralelo). La tabla de suma en módulo 4 se muestra en la tabla siguiente. Por ejemplo, (3+3)MÓD 4 = 2. En consecuencia, se anota un 2 en la hilera 3, columna 3 de la tabla (NOTA: no se considera el acarreo, (es decir “lo que nos llevamos”), y así sucesivamente. Los números de entrada se deben codificar en binario, en donde un número de entrada está dado por X2X1 y el otro por Y2Y1. La salida también se codifica como un número binario Z2Z1. Es decir, Z2Z1 = 00 si la suma es 0; 01 si la suma es 1; 10 si la suma es 2 y 11 si la suma es 3. El sumador en paralelo al igual que el multiplicador, es un circuito rápido usado en los primeros microcomputadores para aumentar la velocidad de cálculo.
X Y
0 1 2 3
0 0 1 2 3 1 1 2 3 0 2 2 3 0 1 3 3 0 1 2
Determinar la expresión lógica mínimas para Z2 y Z1 y realizar el diagrama lógico.
En este caso nos podemos ahorrar la tabla lógica, pues podemos sustituir los valores directamente en el diagrama de K, de acuerdo con la tabla de la suma de módulo 4 siguiente:
Z SUMA Z2 Z1
0 1 2 3
0 0 1 1
0 1 0 1
Ejemplo 8. En un laboratorio de una compañía química se elaboran 14 distintos productos a partir de los componentes W, X, Y y Z. Estas sustancias pesan 800, 400, 200 y 100 mg, respectivamente. Las soluciones depositadas en frascos se transportan por medio de una banda hasta una báscula. Si el peso indicado en la báscula es uno de los siguientes: 200, 500, 700, 800, 1100, 1400 o 1500 mg, entonces un dispositivo electromecánico F, después de agregar al compuesto la sustancia Q, sella el frasco sobre la báscula y lo apartará de la banda; en otro caso, el frasco permanece abierto y la banda lo transportará hacia otra etapa del proceso. Además, por las condiciones previas del proceso, no es posible que lleguen a la báscula ni frascos vacíos, ni frascos que
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 43 -
contengan las siguientes sustancias: WY, YZ, WX o WZ; todas las demás combinaciones sí pueden llegar hasta la báscula.
Determinar la función lógica del circuito combinacional L que acciona el dispositivo F y minimizar haciendo uso de condiciones “no importan”.
Ejemplo 9. En la torre de control de un distribuidor de ferrocarril, un controlador debe seleccionar la ruta de los furgones de carga que entran a una sección, y provienen del punto A, como puede verse en el tablero de control. Dependiendo de las posiciones de los conmutadores, un vagón puede llegar a uno cualesquiera de los cuatro destinos, D0, D1, D2, D3. Otros vagones pueden llegar desde los puntos B o C.
Diseñe un circuito lógico, que tiene como entradas las señales S1 a S5, indicadores de las posiciones de los conmutadores correspondientes, y que encienda una de las lámparas D0, D1, D2, D3, indicando el destino al que llegará el furgón proveniente de A.
Para los casos en que los furgones puedan entrar de B o C (S2 o S3 en la posición 0), todas las lámparas de salida deben encenderse, indicando que un furgón proveniente de A, no puede llegar con seguridad a su destino.
NOTA: S1 bit de mayor peso binario.
Ejemplo 10. Un horno tiene para control e indicación de su temperatura 3 indicadores de salida, que al fijarles un nivel de temperatura, darán salida “0”, mientras la temperatura es menor que la de referencia fijada, y cambian a salida “1” en cuanto la salida es mayor o igual que la de referencia.
Apuntes de Regulación y Automatización. Prácticas y Problemas.
- 44 -
Diseñar el sistema combinacional que de una salida activa si se cumple que: a)Si la temperatura está entre t1 y t2. b)Si es superior a t3. Se sitúan las referencias tal que siempre se cumple t1 < t2< t3.
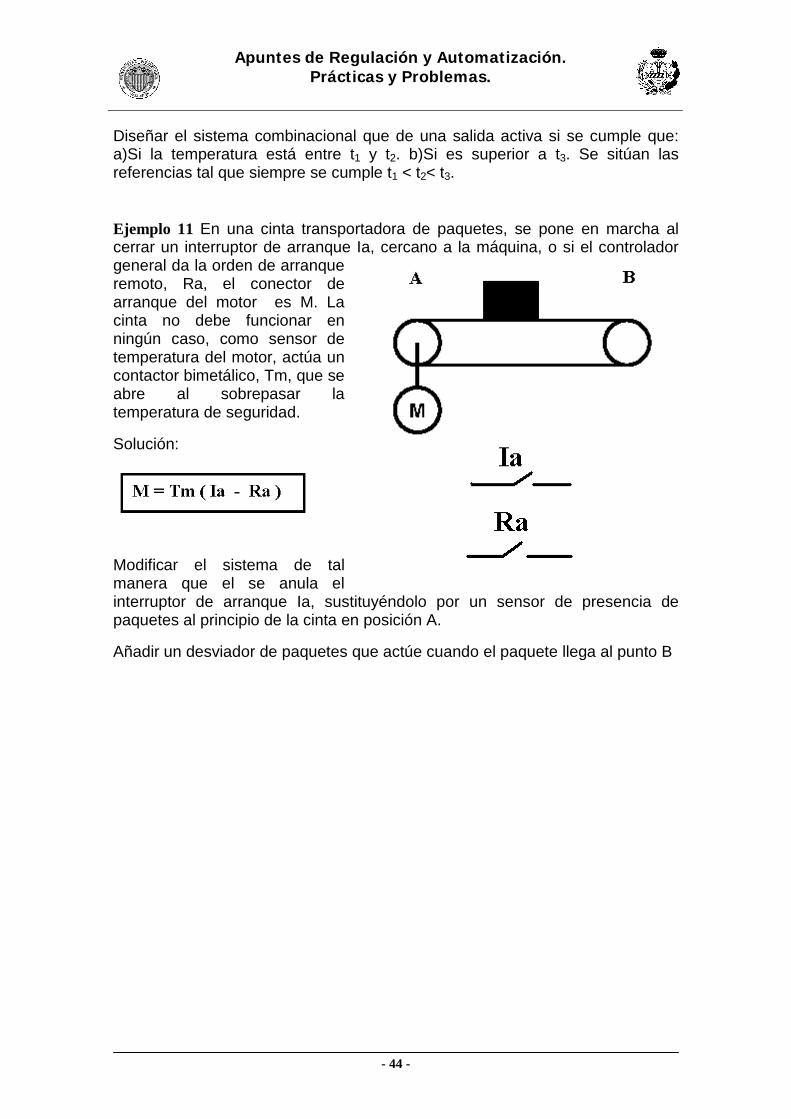
Ejemplo 11 En una cinta transportadora de paquetes, se pone en marcha al cerrar un interruptor de arranque Ia, cercano a la máquina, o si el controlador general da la orden de arranque remoto, Ra, el conector de arranque del motor es M. La cinta no debe funcionar en ningún caso, como sensor de temperatura del motor, actúa un contactor bimetálico, Tm, que se abre al sobrepasar la temperatura de seguridad.
Solución:
Modificar el sistema de tal manera que el se anula el interruptor de arranque Ia, sustituyéndolo por un sensor de presencia de paquetes al principio de la cinta en posición A.
Añadir un desviador de paquetes que actúe cuando el paquete llega al punto B