45
CAPITULO IV FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL CON RETROALIMENTACION Juan F. del Pozo L.
| Date post: | 24-Dec-2015 |
| Category: |
Documents |
| Upload: | viviana-vanessa-villavicencio |
| View: | 286 times |
| Download: | 3 times |

CAPITULO IVFUNCIONAMIENTO DE LOS SISTEMAS DE
CONTROL CON RETROALIMENTACION
Juan F. del Pozo L.

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLSistema de control de circuito cerradoEspecificaciones en el dominio de tiempo para un
sistema de controlRelación entre la ubicación de los polos de la
función de transferencia y la respuesta transitoria
El error en estado estacionario de los sistemas de control realimentados
Ejemplo de diseño. La selección del Controlador y su acción en el error de estado estacionario y en la respuesta dinámica del sistema.
19/04/23 FIEC 2

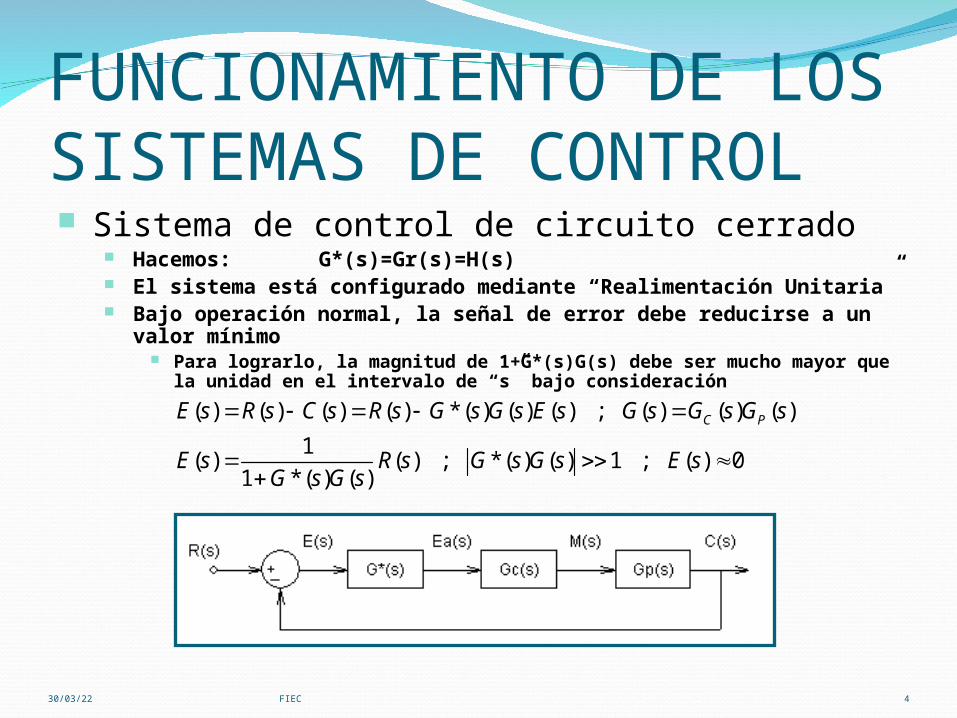
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL Sistema de control de circuito cerrado
Se especifica la señal de salida para el sistema Se genera una señal que es la diferencia entre la respuesta
deseada y la real, Error del sistema: E(s)=R(s)-C(s), igual unidades.
La señal de error se utiliza para controlar el proceso Dado un sistema general:
C(s) Señal de salida, por ejemplo: velocidad rad/seg R(s) Señal de referencia, por ejemplo: velocidad rad/seg Ea(s) Señal del error actuante, por ejemplo: voltios
19/04/23 FIEC 3
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL Sistema de control de circuito cerrado
Hacemos: G*(s)=Gr(s)=H(s) El sistema está configurado mediante “Realimentación
Unitaria” Bajo operación normal, la señal de error debe reducirse a un
valor mínimo Para lograrlo, la magnitud de 1+G*(s)G(s) debe ser mucho mayor
que la unidad en el intervalo de “s” bajo consideración
19/04/23 FIEC 4
( ) ( ) ( ) ( ) *( ) ( ) ( ) ; ( ) ( ) ( )
1( ) ( ) ; *( ) ( ) 1 ; ( ) 0
1 *( ) ( )
C PE s R s C s R s G s G s E s G s G s G s
E s R s G s G s E sG s G s
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
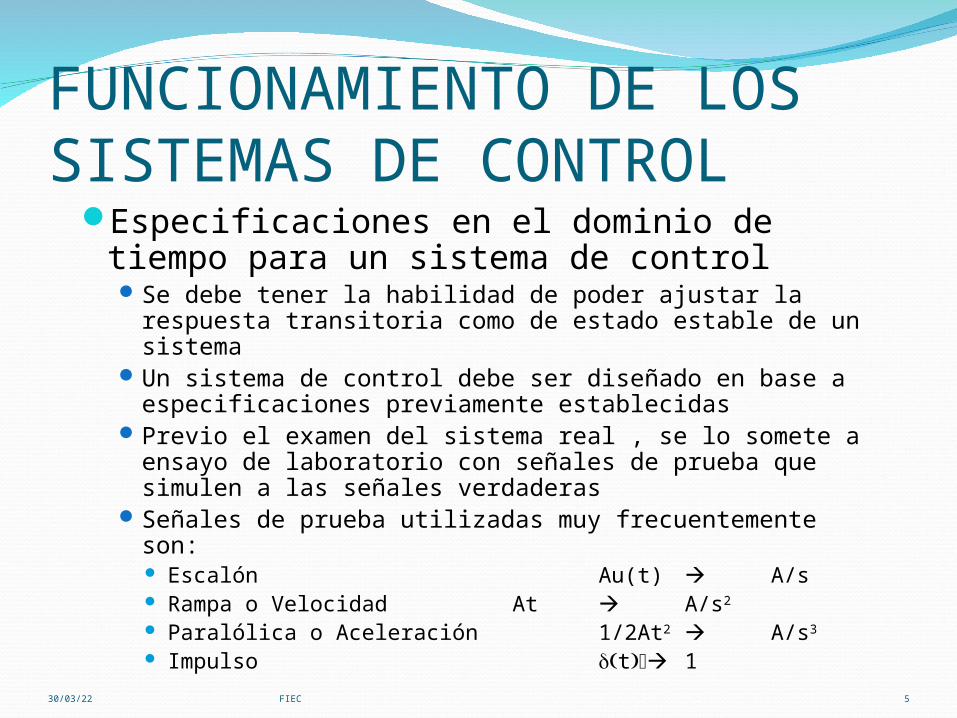
Especificaciones en el dominio de tiempo para un sistema de controlSe debe tener la habilidad de poder ajustar la
respuesta transitoria como de estado estable de un sistema
Un sistema de control debe ser diseñado en base a especificaciones previamente establecidas
Previo el examen del sistema real , se lo somete a ensayo de laboratorio con señales de prueba que simulen a las señales verdaderas
Señales de prueba utilizadas muy frecuentemente son: Escalón Au(t) A/s Rampa o Velocidad At A/s2
Paralólica o Aceleración 1/2At2 A/s3
Impulso t 119/04/23 FIEC 5

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Especificaciones en el dominio de tiempo para un sistema de control Funcionamiento de un sistema de
“segundo orden” El conocimiento del sistema de
segundo orden es muy importante porque muchos sistemas reales pueden ser aproximados a este caso Un polo en el origen “s = 0” y otro en “s
= –p”. No hay ceros.
19/04/23 FIEC 6
2
2
2
2 2
ζω
2 1
( ) ( ) ; ( ) 1
; 2
( ) ( )2
1( )
1( ) 1 sen( )
1 ; tan /
n n
n
n n
tn
KC s R s H s
s ps K
K p
C s R ss s
R ss
c t e t
n

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Especificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden”
19/04/23 FIEC 7

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Especificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden” Probaremos el sistema con una señal “escalón
unitario” Utilizando SIMULINK observaremos su respuesta
para diferentes valores de su “constante de amortiguamiento”
19/04/23 FIEC 8

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Especificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden”
Probaremos el sistema con una señal “escalón unitario”
Constante de Amortiguamiento: 2.0, 1.0, 0.5 Frecuencia Natural: 1.0
19/04/23 FIEC 9
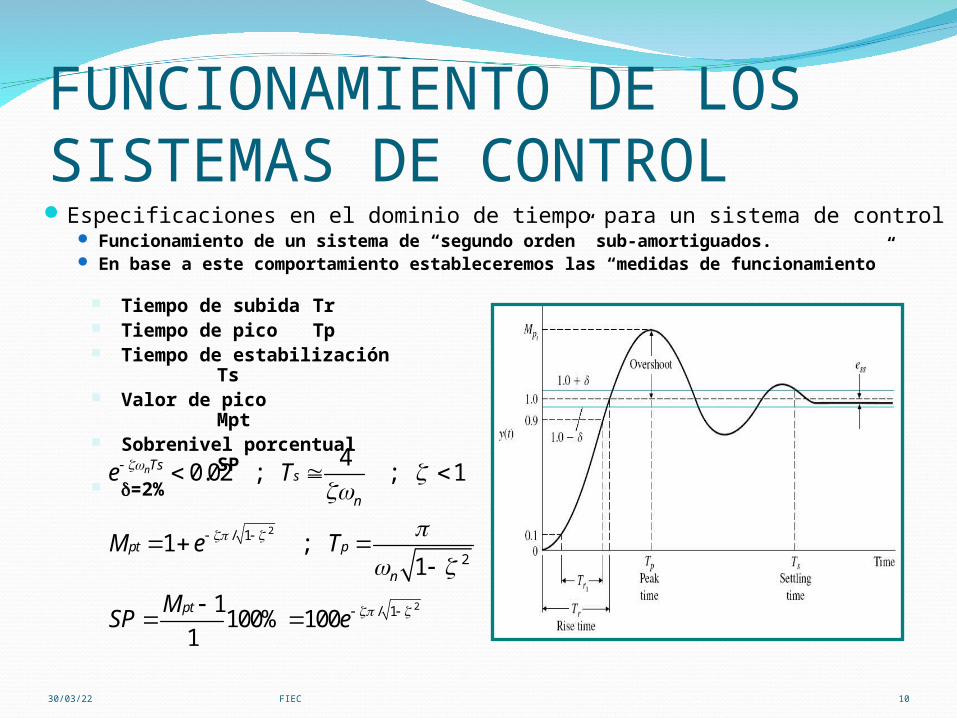
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEspecificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden” sub-amortiguados. En base a este comportamiento estableceremos las “medidas de
funcionamiento”
19/04/23 FIEC 10
Tiempo de subida Tr Tiempo de pico Tp Tiempo de estabilización
Ts Valor de pico
Mpt Sobrenivel porcentual SP =2%
2
2
/ 1
2
/ 1
40.02 ; ; 1
1 ;1
1100% 100
1
nTs s
n
pt p
n
pt
e T
M e T
MSP e
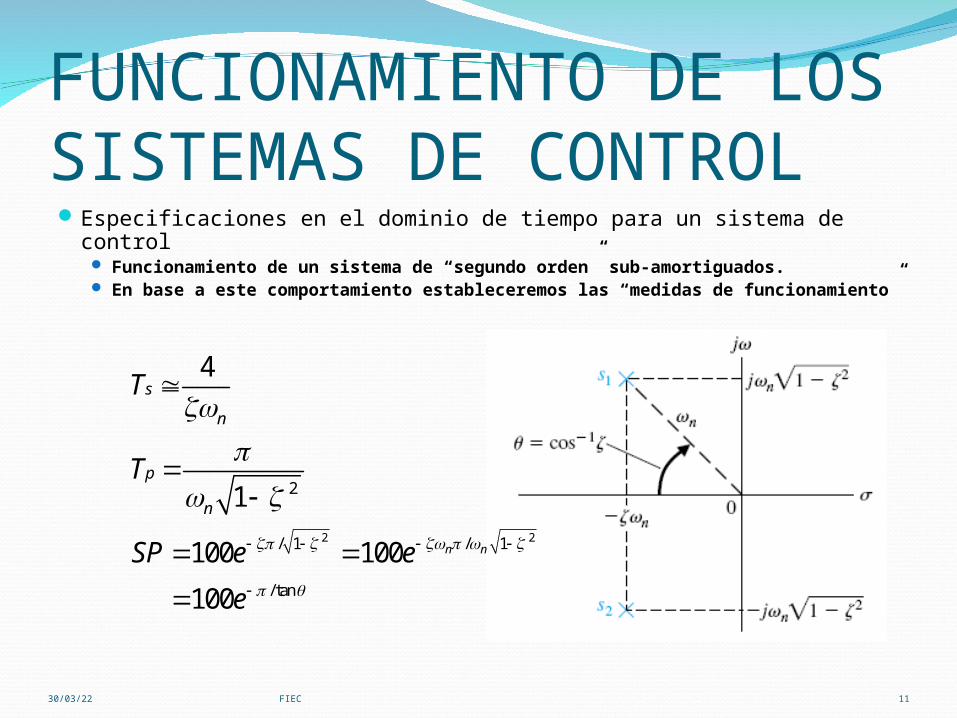
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEspecificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden” sub-amortiguados. En base a este comportamiento estableceremos las “medidas de
funcionamiento”
19/04/23 FIEC 11
2 2
2
/ 1 / 1
/ tan
4
1
100 100
100
n n
s
n
p
n
T
T
SP e e
e
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
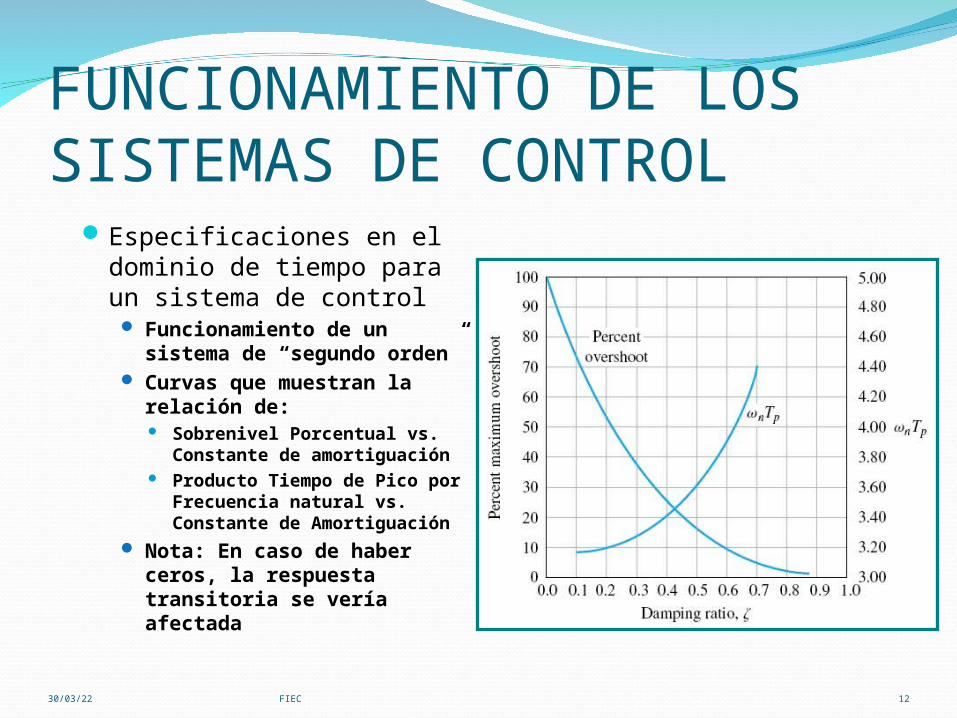
Especificaciones en el dominio de tiempo para un sistema de control
Funcionamiento de un sistema de “segundo orden”
Curvas que muestran la relación de: Sobrenivel Porcentual vs.
Constante de amortiguación Producto Tiempo de Pico por
Frecuencia natural vs. Constante de Amortiguación
Nota: En caso de haber ceros, la respuesta transitoria se vería afectada
19/04/23 FIEC 12
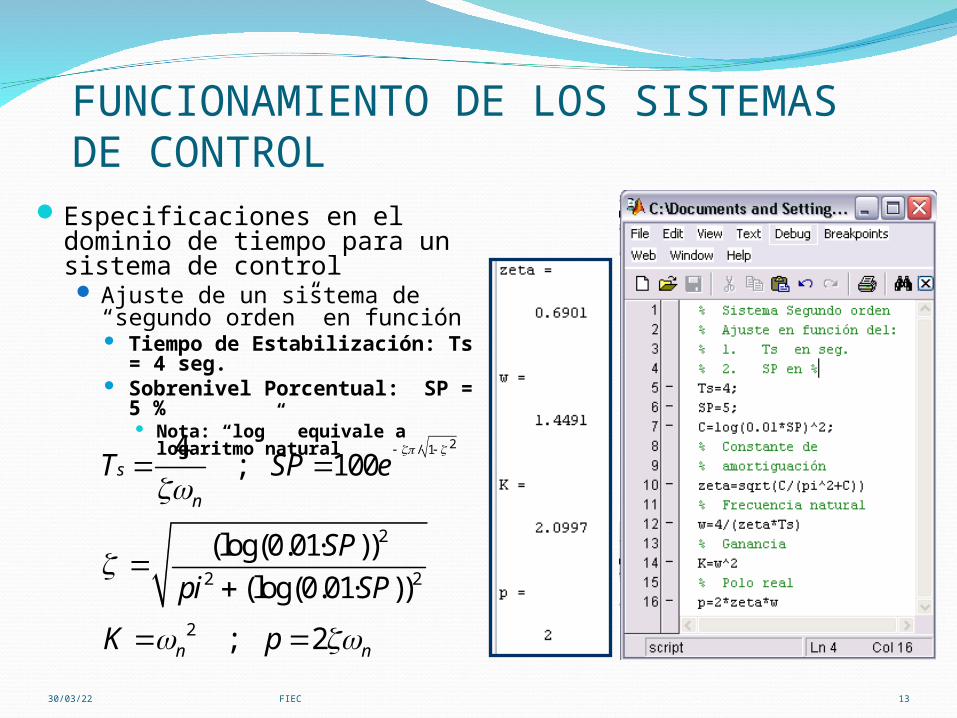
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Especificaciones en el dominio de tiempo para un sistema de control Ajuste de un sistema de
“segundo orden” en función Tiempo de Estabilización: Ts
= 4 seg. Sobrenivel Porcentual: SP =
5 % Nota: “log” equivale a
logaritmo natural
19/04/23 FIEC 13
2/ 1
2
2 2
2
4; 100
(log(0.01· ))
(log(0.01· ))
; 2
s
n
n n
T SP e
SP
pi SP
K p
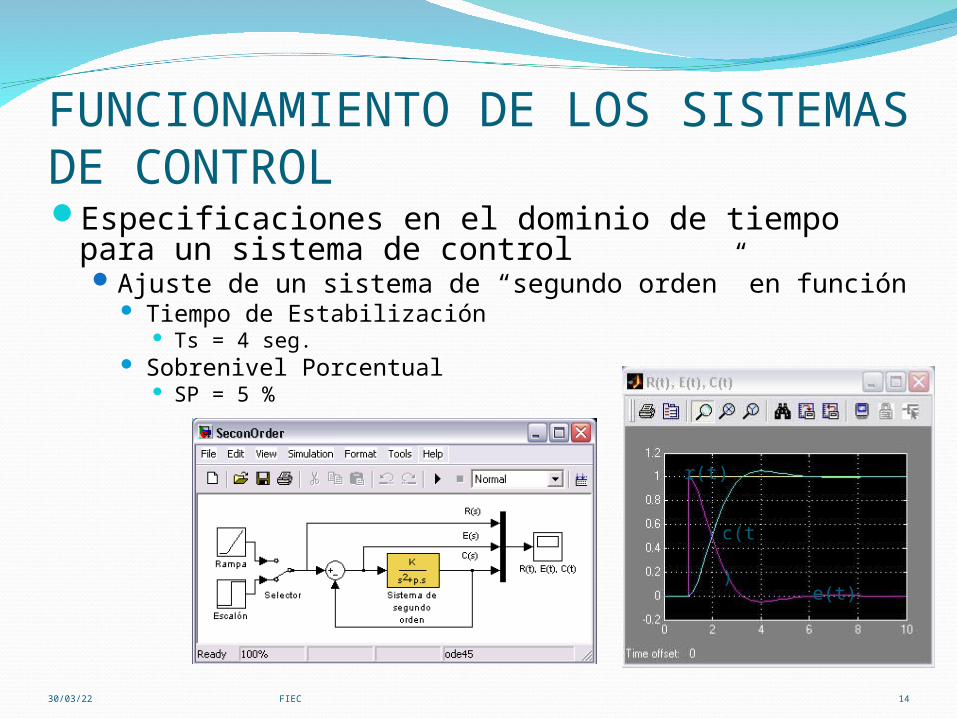
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEspecificaciones en el dominio de tiempo para un
sistema de controlAjuste de un sistema de “segundo orden” en función
Tiempo de Estabilización Ts = 4 seg.
Sobrenivel Porcentual SP = 5 %
19/04/23 FIEC 14
c(t)
r(t)
e(t)
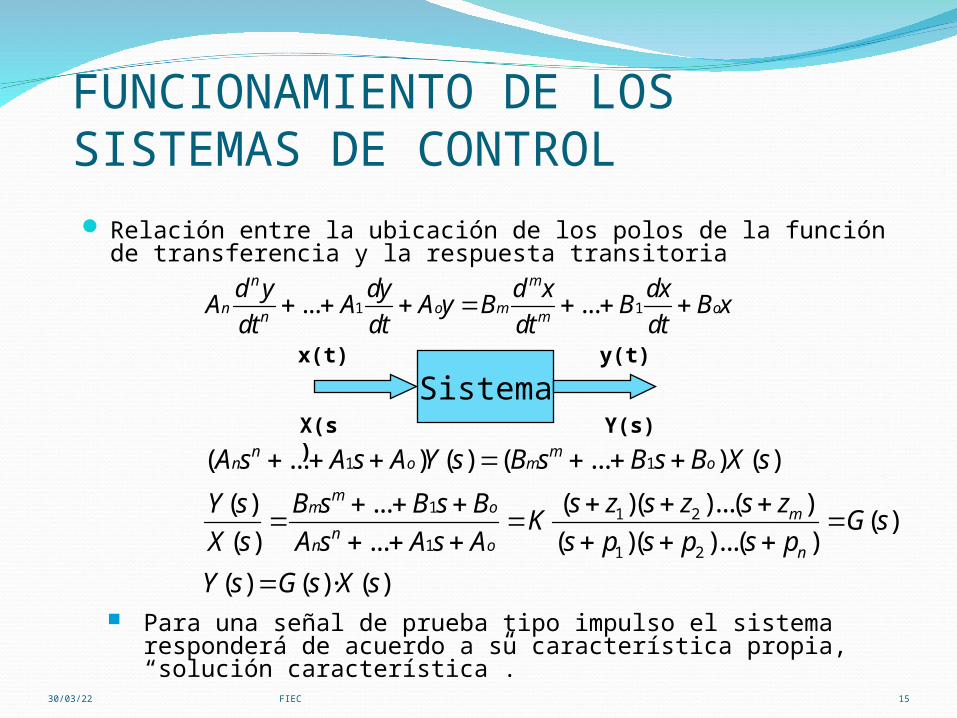
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL Relación entre la ubicación de los polos de la función de
transferencia y la respuesta transitoria
1 1... ...n m
n o m on m
d y dy d x dxA A A y B B B x
dt dt dt dt
19/04/23 FIEC 15
Sistemax(t) y(t)
X(s) Y(s)
1 1
1 1 2
1 1 2
( ... ) ( ) ( ... ) ( )
( )( )...( )( ) ...( )
( ) ... ( )( )...( )
( ) ( )· ( )
n mn o m o
mm o m
nn o n
A s A s A Y s B s B s B X s
s z s z s zY s B s B s BK G s
X s A s A s A s p s p s p
Y s G s X s
Para una señal de prueba tipo impulso el sistema responderá de acuerdo a su característica propia, “solución característica”.
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLRelación entre la ubicación de los polos de la función de
transferencia y la respuesta transitoria La salida de un sistema sin raíces repetidas a la entrada de escalón unitario
representada en forma de fracciones parciales:
Ai , Bk , Ck son residuos. Polos reales: -i. Polos complejos conjugados: -k ± jk La transformada inversa de Laplace de la señal de salida. Ver Tabla 2.3
19/04/23 FIEC 16
2 2 21 1
( ) 1( ) ( )· ( ) ; ( ) ; 1 ; ( )
( )
1( )
2 ( )
M Ni k k
i ki k k k
p sY s G s X s G s K K X s
q s s
A B s CY s
s s s s
1 1
( ) 1 ( )i k
M Nt t
i k k ki k
y t Ae D e sen t

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Pares importantes de transformadas de Laplace
19/04/23 FIEC 17

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Pares importantes de transformadas de Laplace
19/04/23 FIEC 18
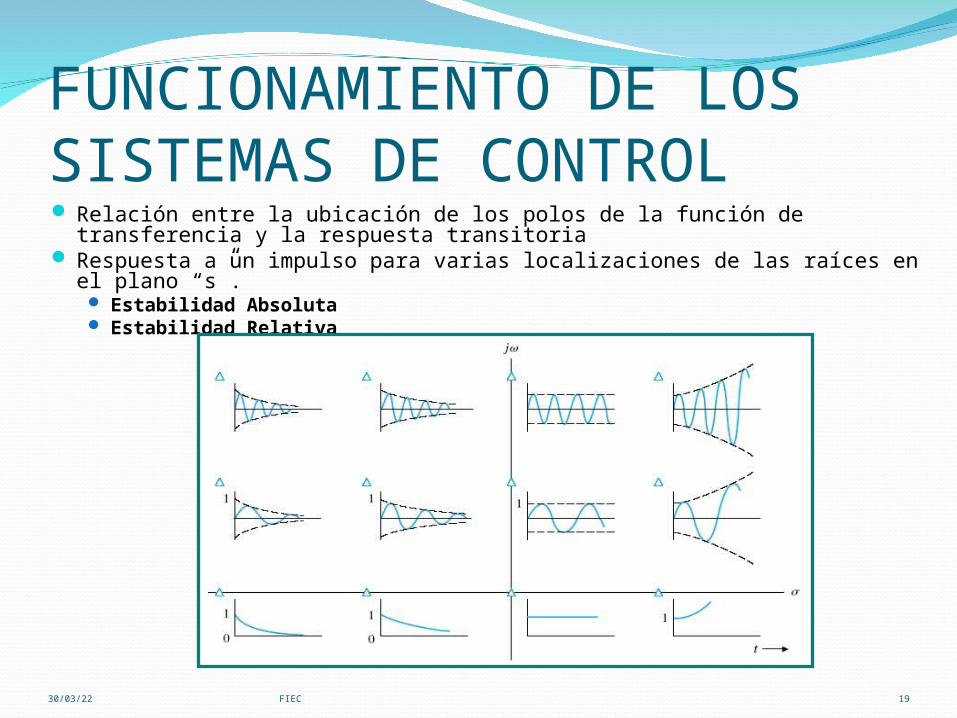
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL Relación entre la ubicación de los polos de la función de transferencia y la
respuesta transitoria Respuesta a un impulso para varias localizaciones de las raíces en el plano
“s”. Estabilidad Absoluta Estabilidad Relativa
19/04/23 FIEC 19
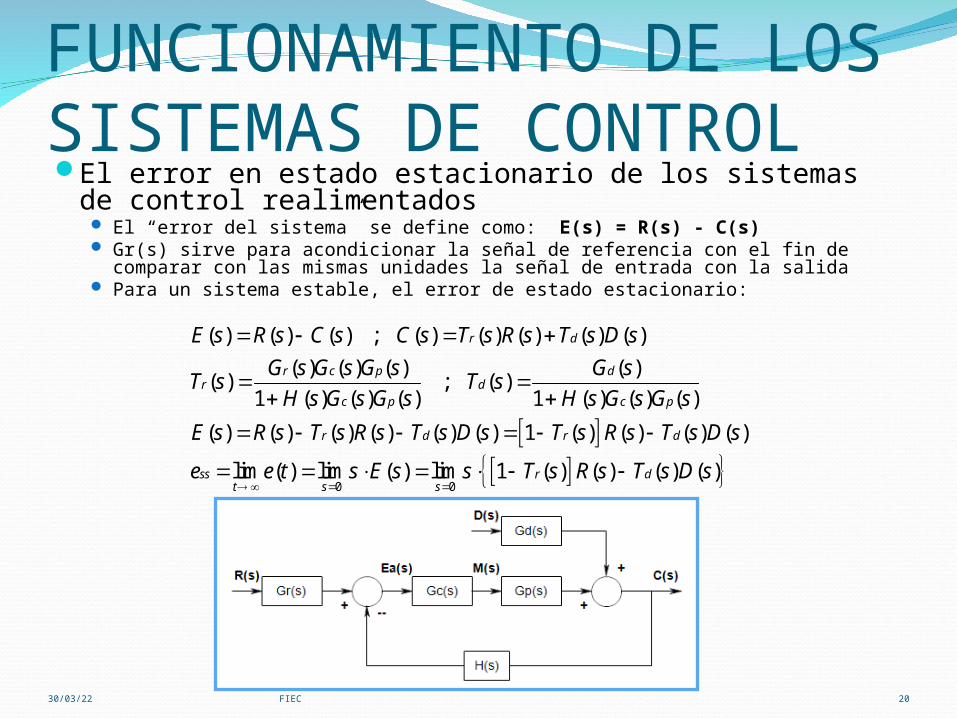
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEl error en estado estacionario de los sistemas de
control realimentados El “error del sistema” se define como: E(s) = R(s) - C(s) Gr(s) sirve para acondicionar la señal de referencia con el fin de comparar con
las mismas unidades la señal de entrada con la salida Para un sistema estable, el error de estado estacionario:
19/04/23 FIEC 20
0 0
( ) ( ) ( ) ; ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ; ( )
1 ( ) ( ) ( ) 1 ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) 1 ( ) ( ) ( ) ( )
lim ( ) lim ( ) lim 1 ( ) (
r d
r c p dr d
c p c p
r d r d
ss rt s s
E s R s C s C s T s R s T s D s
G s G s G s G sT s T s
H s G s G s H s G s G s
E s R s T s R s T s D s T s R s T s D s
e e t s E s s T s R
) ( ) ( )ds T s D s

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados El “error del sistema” se define como: E(s) = R(s) - C(s) Gr(s) sirve para acondicionar la señal de referencia con el fin de
comparar con las mismas unidades la señal de entrada con la salida Para un sistema estable, el error de estado estacionario cuando D(s)=0:
19/04/23 FIEC 21
0
( ) ( ) ( ) ; ( ) ( ) ( )
( ) ( )( ) 0 ( ) ( ) ( )
1 ( ) ( )
1 ( ) ( ) ( ) ( )( ) ( )
1 ( ) ( )
1( ) ( ) ( ) ( )
1 ( ) ( )
lim ( ) lim ( )
c p
r
r
r
sst s
E s R s C s G s G s G s
G s G sD s E s R s R s
H s G s
H s G s G s G sE s R s
H s G s
G s H s E s R sH s G s
e e t s E s
)(lim)(lim ssEtee0st
ss

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados El “error del sistema” se define como: E(s) = R(s) - C(s) Se bebe cumplir con: Gr(s) = H(s) ; G(s)·H(s) = GH(s) Prueba del sistema con diferentes señales de entrada tipo
estándar: Entrada de escalón unitario: 1/s
Entrada rampa o velocidad: 1/s2
Entrada de aceleración: 1/s3
19/04/23 FIEC 22
)0(11
)(lim111
)(11
lim)(lim0
00 GHsGHssGHsssEe
sss
ss
)(1
lim))((lim
11)(1
1lim
00
20 ssGHssGHsssGHse
ss
sss
)(1
lim))((lim
11)(1
1lim 2022
0
30 sGHssGHssssGHse
ss
sss

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados
En términos generales un sistema puede ser representado por:
“N” establece el “tipo de función de transferencia” en base al número de polos en el origen; por ejemplo: “Tipo Cero” equivale a cero polos en el origen
Prueba del sistema con diferentes señales de entrada tipo estándar: Para sistema “Tipo Cero” y señal de entrada de escalón unitario:
El error de estado estacionario: Kp : “Constante de Posición”
19/04/23 FIEC 23
)()(
)(k
Q1k
Ni
M1i
psszs
KsGH
1 1
01 1
( )( ) ; lim ( )
( )
M Mi i i i
pQ Qsk k k k
s z zGH s K GH s K K
s p p
pss K1
1e
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados
Prueba del sistema con diferentes señales de entrada tipo estándar: Para sistema “Tipo Uno” y señal de entrada de rampa:
El error de estado estacionario: Kv : “Constante de Velocidad”
19/04/23 FIEC 24
1 1
01 1
( )( ) ; lim ( )
( )
M Mi i i i
vQ Qsk k k k
s z zKGH s sGH s K K
s s p p
vss K
1e

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados
Prueba del sistema con diferentes señales de entrada tipo estándar: Para sistema “Tipo Dos” y señal de entrada de aceleración:
El error de estado estacionario: Ka : “Constante de Aceleración”
19/04/23 FIEC 25
21 12 0
1 1
( )( ) ; lim ( )
( )
M Mi i i i
aQ Qsk k k k
s z zKGH s s GH s K K
s s p p
ass K
1e
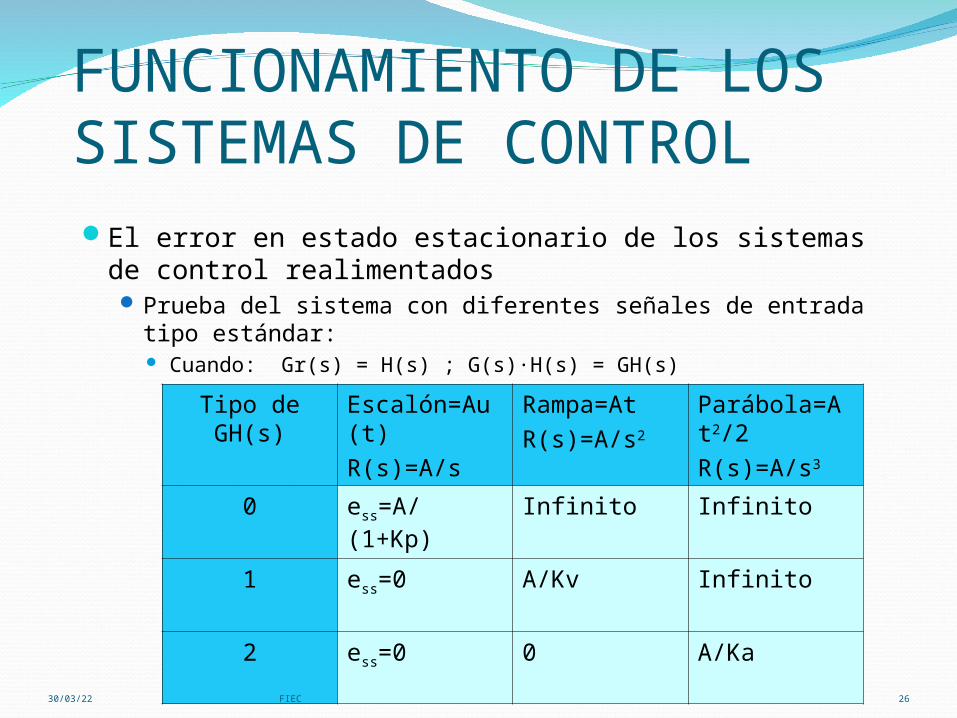
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEl error en estado estacionario de los sistemas de
control realimentados Prueba del sistema con diferentes señales de entrada tipo
estándar: Cuando: Gr(s) = H(s) ; G(s)·H(s) = GH(s)
Tipo de GH(s) Escalón=Au(t)
R(s)=A/s
Rampa=At
R(s)=A/s2
Parábola=At2/2
R(s)=A/s3
0 ess=A/(1+Kp) Infinito Infinito
1 ess=0 A/Kv Infinito
2 ess=0 0 A/Ka
19/04/23 FIEC 26

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados
Prueba del sistema de segundo orden “TipoUno” con una señal de entrada tipo rampa: Ajustar en función del: Tiempo de Estabilización
Ts = 4 seg. Sobrenivel Porcentual
SP = 5 %
19/04/23 FIEC 27
vss
0sv
K1
e
pK
pssK
sK
)(
lim

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
El error en estado estacionario de los sistemas de control realimentados
Prueba del sistema de segundo orden “TipoUno” con una señal de entrada tipo rampa: Ajustar en función del Tiempo de Estabilización y el Sobrenivel
Porcentual Ts = 4 seg. SP = 5 %
19/04/23 FIEC 28
c(t)
r(t)
e(t)

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROLEjemplo de diseño. La selección del Controlador y su acción en
el error de estado estacionario y en la respuesta dinámica del sistema.
Caso de estudio: Tomaremos el caso de un generador de corriente continua. El generador es impulsado por una turbina la que mantiene la velocidad
constante. Se dispone de un amplificador que se encargará de controlar al sistema. Debemos seleccionar un amplificador adecuado de tal manera de poder
restablecer el nivel del voltaje de servicio en su valor nominal después que el sistema ha sido perturbado con una variación de carga tipo escalón.
19/04/23 FIEC 29
)(1
)(
)()(
)()()()(
sVsLR
sI
sIKsE
sIsRsEsV
fff
f
fgg
aaga
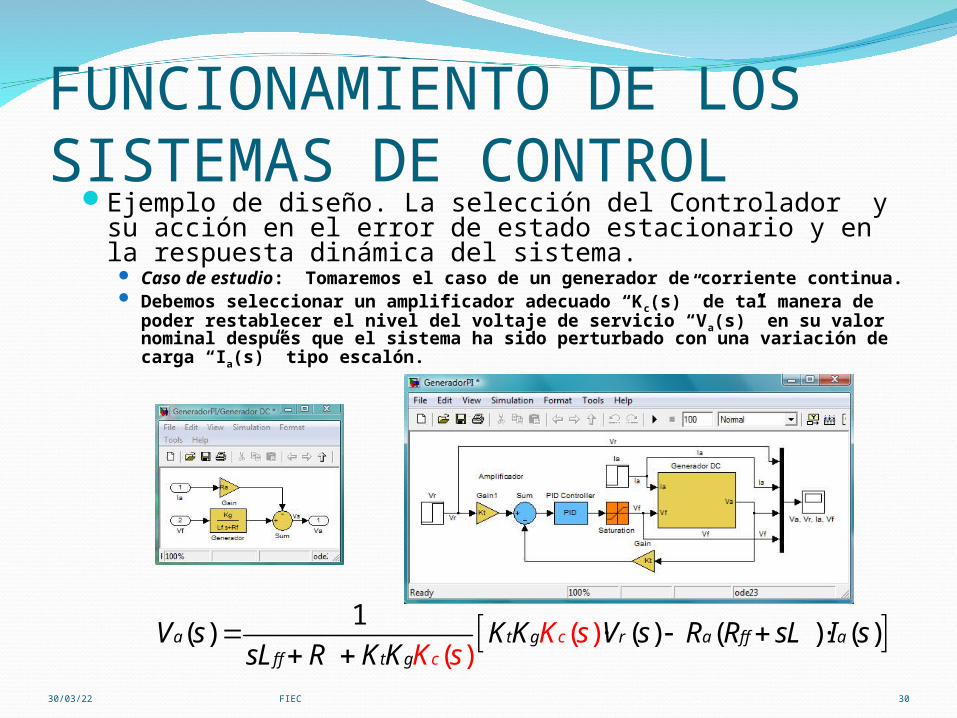
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Ejemplo de diseño. La selección del Controlador y su acción en el error de estado estacionario y en la respuesta dinámica del sistema.
Caso de estudio: Tomaremos el caso de un generador de corriente continua. Debemos seleccionar un amplificador adecuado “Kc(s)” de tal manera de
poder restablecer el nivel del voltaje de servicio “Va(s)” en su valor nominal después que el sistema ha sido perturbado con una variación de carga “Ia(s)” tipo escalón.
19/04/23 FIEC 30
1( ) · ( ) ( )· (
()( )
)c
ca t g r a f f a
f f t gKV s KK V s R R sL I s
sL Rs
KKK s
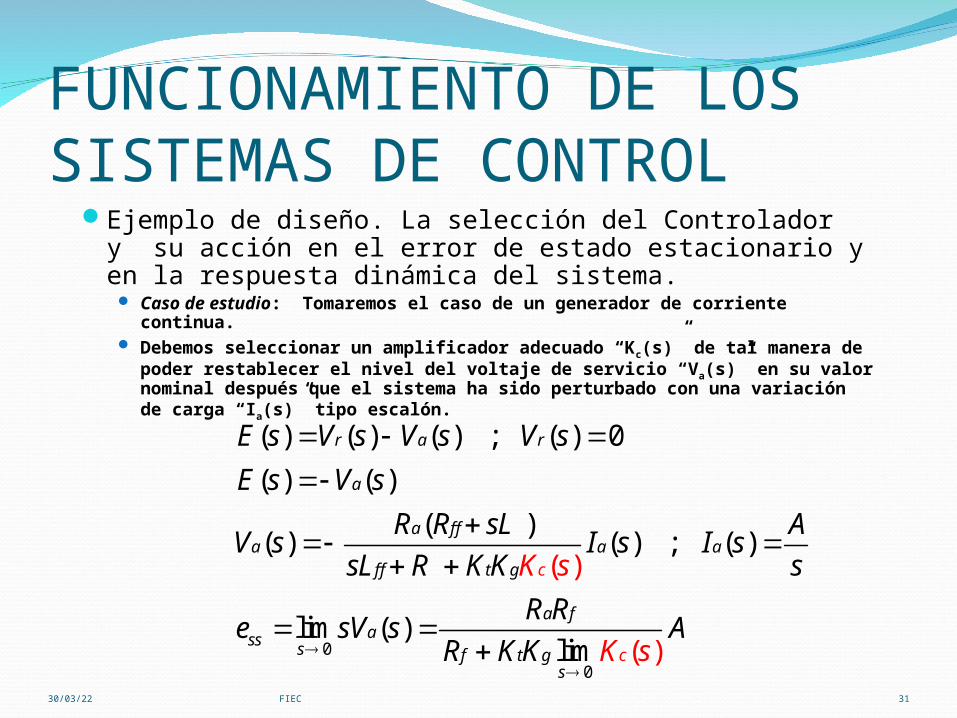
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Ejemplo de diseño. La selección del Controlador y su acción en el error de estado estacionario y en la respuesta dinámica del sistema.
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Debemos seleccionar un amplificador adecuado “Kc(s)” de tal manera de poder restablecer el nivel del voltaje de servicio “Va(s)” en su valor nominal después que el sistema ha sido perturbado con una variación de carga “Ia(s)” tipo escalón.
19/04/23 FIEC 31
00
( ) ( ) ( ) ; ( ) 0
( ) ( )
( )( ) ( ) ; ( )
lim ( )lim
( )
( )
r a r
a
a f fa a a
f f t g
a fa
c
sss f t g
sc
E s V s V s V s
E s V s
R R sL AV s I s I s
sL R KK s
R Re sV s A
R KK
K s
K s
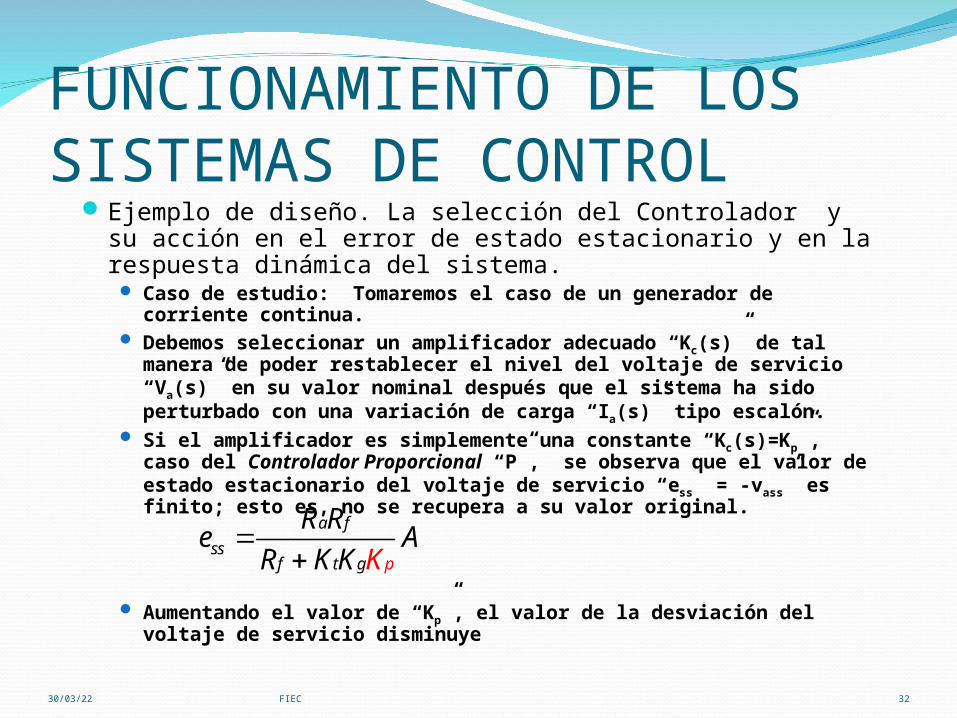
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Ejemplo de diseño. La selección del Controlador y su acción en el error de estado estacionario y en la respuesta dinámica del sistema.
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Debemos seleccionar un amplificador adecuado “Kc(s)” de tal manera de poder restablecer el nivel del voltaje de servicio “Va(s)” en su valor nominal después que el sistema ha sido perturbado con una variación de carga “Ia(s)” tipo escalón.
Si el amplificador es simplemente una constante “Kc(s)=Kp”, caso del Controlador Proporcional “P”, se observa que el valor de estado estacionario del voltaje de servicio “ess = -vass” es finito; esto es, no se recupera a su valor original.
Aumentando el valor de “Kp”, el valor de la desviación del voltaje de servicio disminuye
19/04/23 FIEC 32
a f
ssf g pt
R Re A
R KK K
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
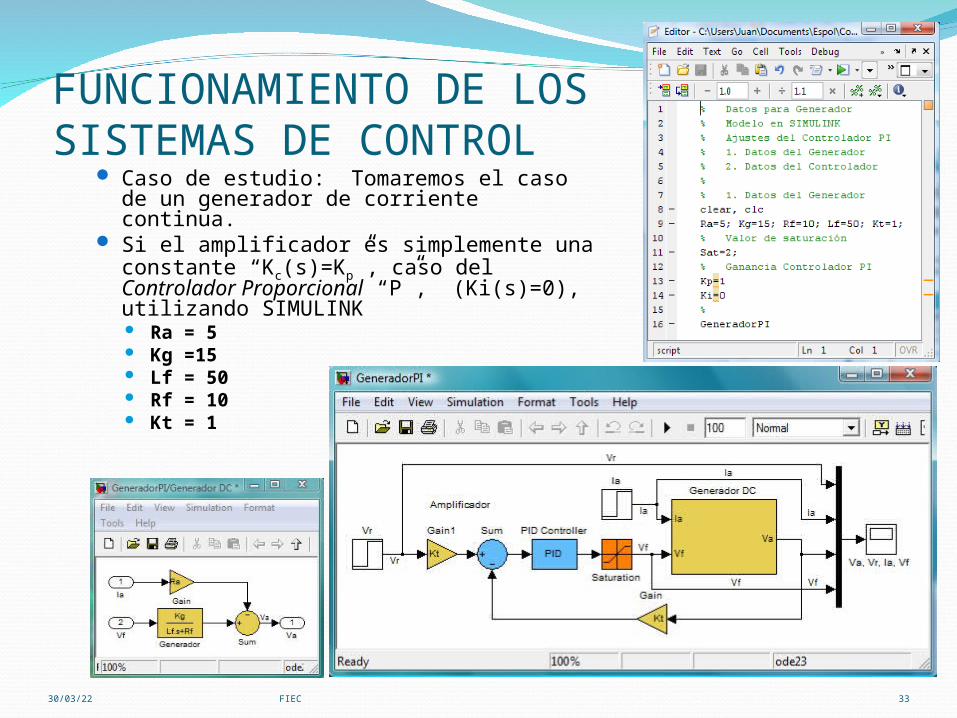
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Si el amplificador es simplemente una constante “Kc(s)=Kp”, caso del Controlador Proporcional “P”, (Ki(s)=0), utilizando SIMULINK Ra = 5 Kg =15 Lf = 50 Rf = 10 Kt = 1
19/04/23 FIEC 33

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Efecto en Va(t) por cambio en: Referencia Carga
Ajuste del Controlador Proporcional “P”: Kp = 1 Kp = 4
19/04/23 FIEC 34
Va(t)
Vr(t)
Ia(t)Vf(t)
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
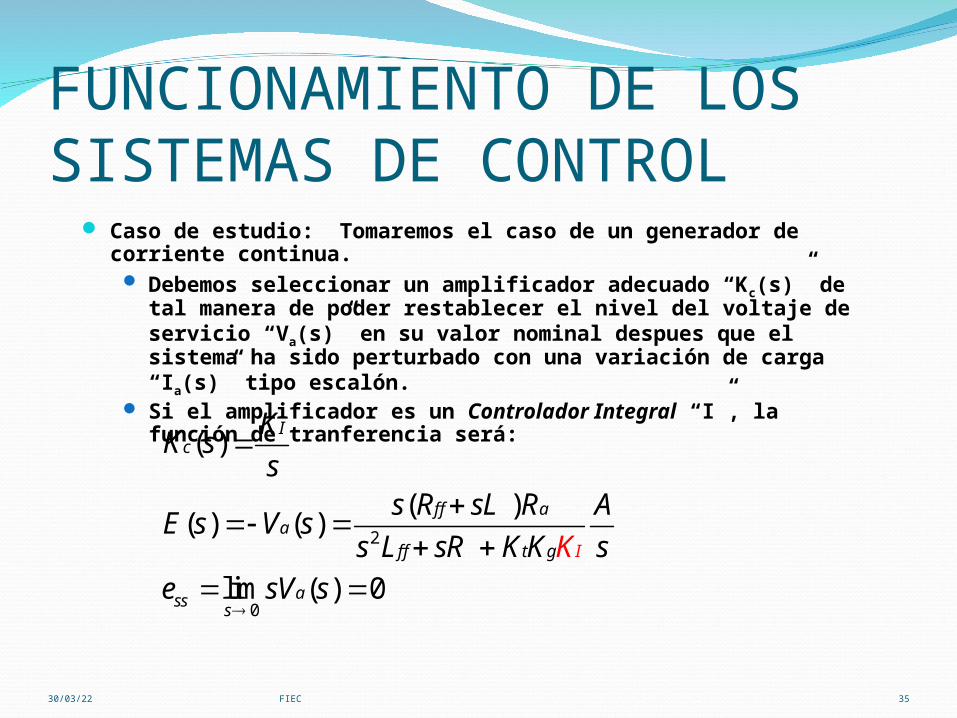
Debemos seleccionar un amplificador adecuado “Kc(s)” de tal manera de poder restablecer el nivel del voltaje de servicio “Va(s)” en su valor nominal despues que el sistema ha sido perturbado con una variación de carga “Ia(s)” tipo escalón.
Si el amplificador es un Controlador Integral “I”, la función de tranferencia será:
19/04/23 FIEC 35
2
0
( )
( )( ) ( )
lim ( ) 0
Ic
f f aa
f f t g
ass
I
s
KK s
ss R sL R A
E s V ss L sR KK s
e sV s
K

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Efecto en Va(t) por cambio en: Referencia Carga
Ajuste del Controlador Integral “I”: KI = 1 KI = 4
19/04/23 FIEC 36
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
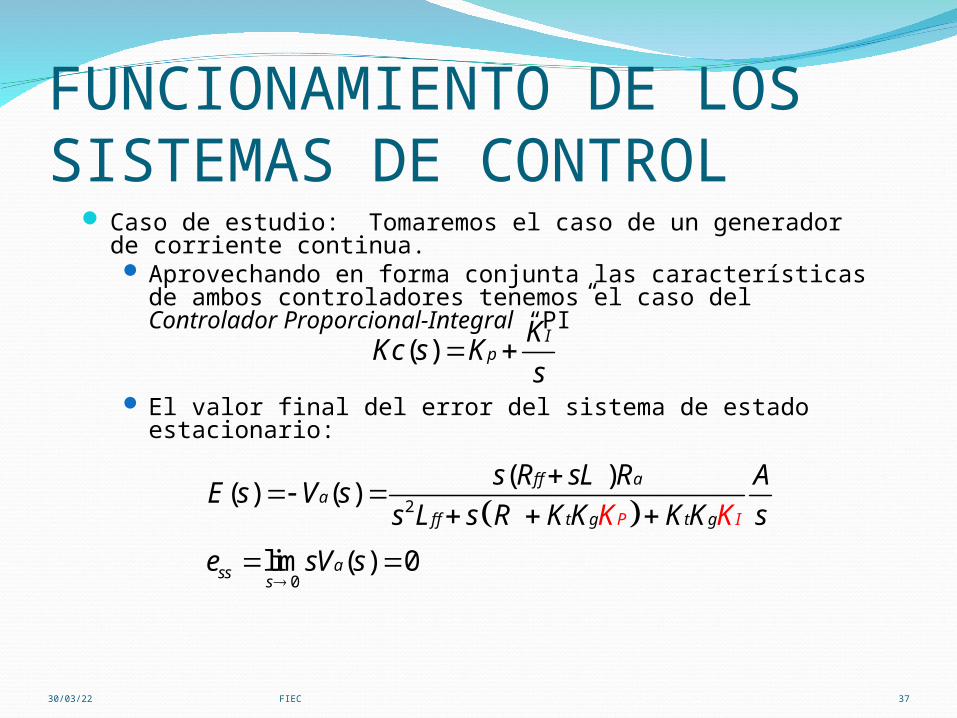
Caso de estudio: Tomaremos el caso de un generador de corriente continua. Aprovechando en forma conjunta las características de
ambos controladores tenemos el caso del Controlador Proporcional-Integral “PI”
El valor final del error del sistema de estado estacionario:
19/04/23 FIEC 37
2
0
( )( ) ( )
lim ( ) 0
f f aa
f f t g t g
asss
P I
s R sL R AE s V s
s L s R KK KK s
e sV s
K K
( )I
pK
Kc s Ks
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
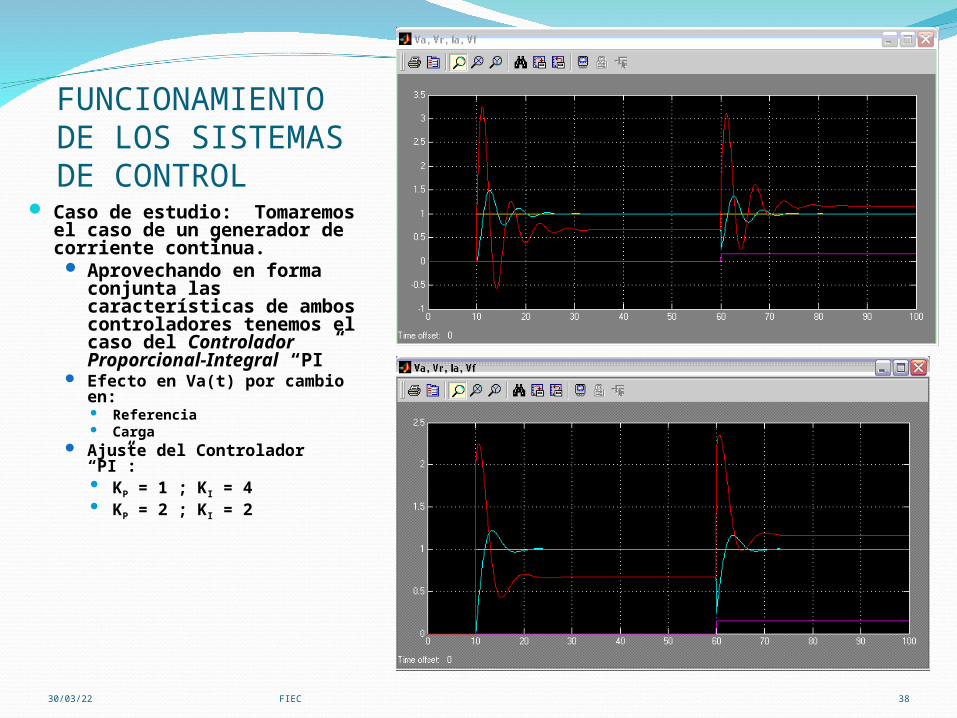
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Aprovechando en forma conjunta las características de ambos controladores tenemos el caso del Controlador Proporcional-Integral “PI”
Efecto en Va(t) por cambio en: Referencia Carga
Ajuste del Controlador “PI”: KP = 1 ; KI = 4 KP = 2 ; KI = 2
19/04/23 FIEC 38
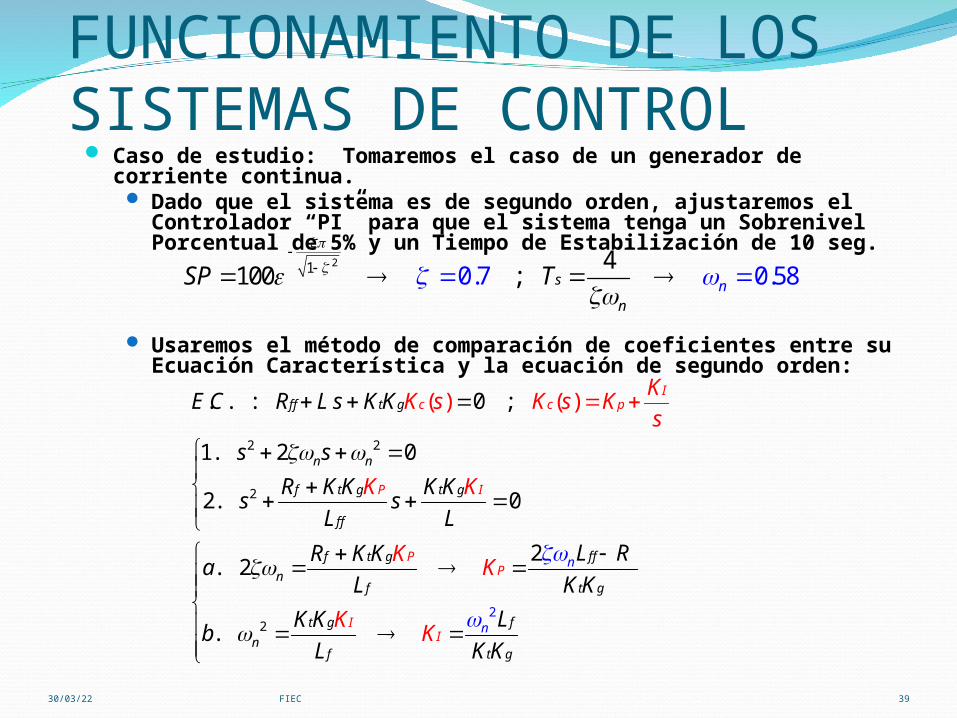
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Dado que el sistema es de segundo orden, ajustaremos el Controlador “PI” para que el sistema tenga un Sobrenivel Porcentual de 5% y un Tiempo de Estabilización de 10 seg.
Usaremos el método de comparación de coeficientes entre su Ecuación Característica y la ecuación de segundo orden:
2
22
2
2
(. . : 0 ;
1. 2 0
2. 0
2. 2
) (
.
)f f t g
n n
f t g t g
f f
f ff t g
Ic c p
P I
P n
n
nf t g
ft g
nf
P
II
t g
KK s K s K
s
K K
KK
KK
E C R L s KK
s s
R KK KKs s
L L
L RR KKa
L KK
LKKb
L KK
21 0.4
100 ;7 0.58s
nnSP T
19/04/23 FIEC 39
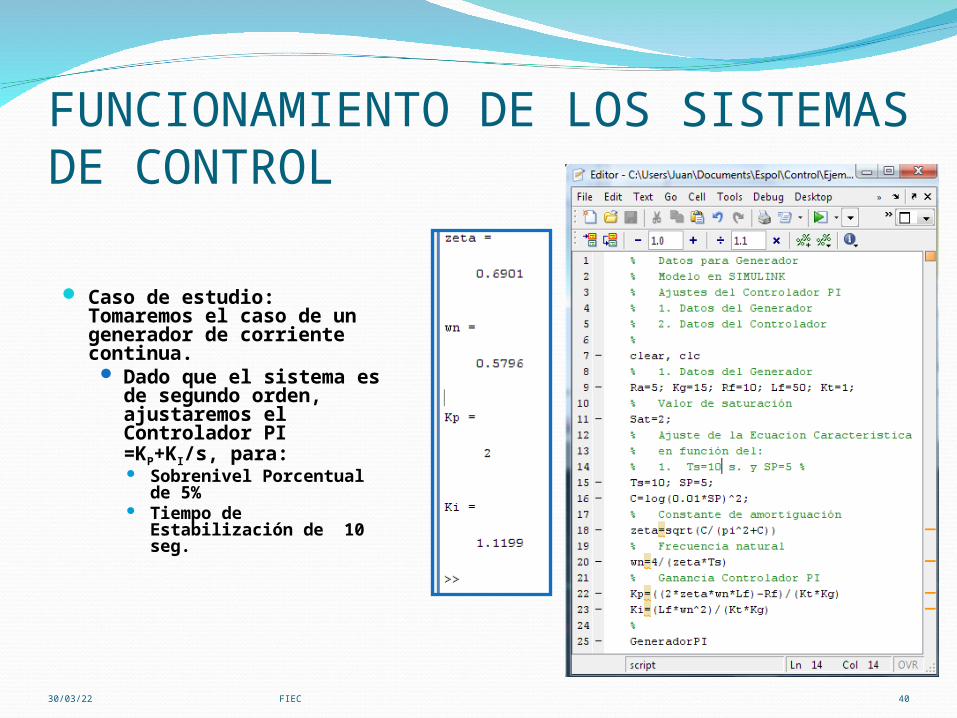
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Dado que el sistema es de segundo orden, ajustaremos el Controlador PI =KP+KI/s, para: Sobrenivel Porcentual
de 5% Tiempo de
Estabilización de 10 seg.
19/04/23 FIEC 40
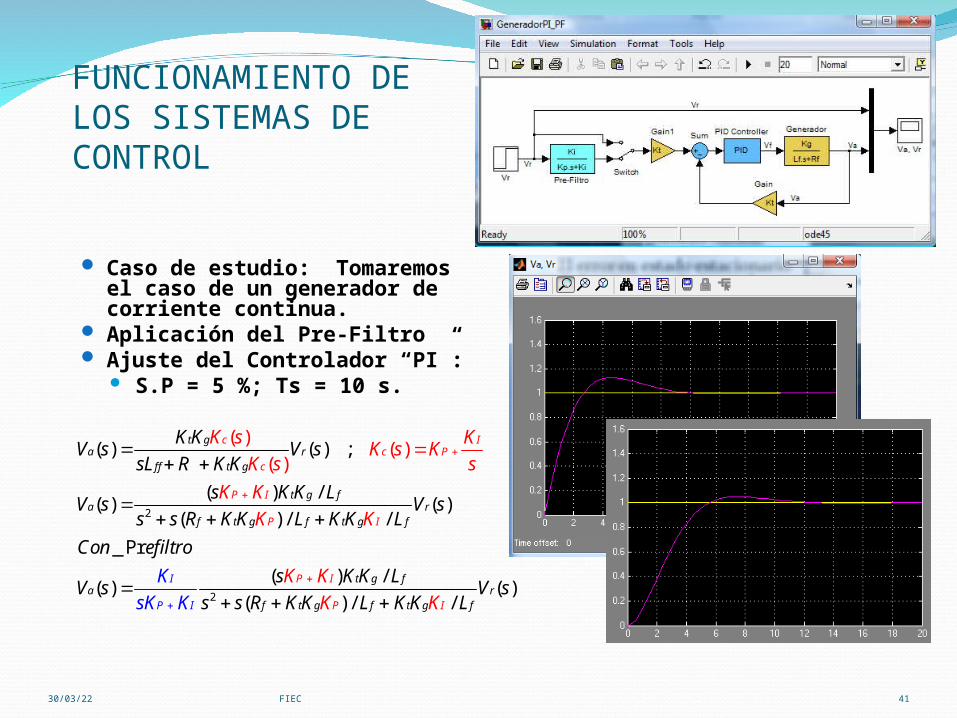
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
Aplicación del Pre-Filtro Ajuste del Controlador “PI”:
S.P = 5 %; Ts = 10 s.
2
2
( ) ( ) ;
( ) /( ) ( )
( ) / /
_ Pr
( ) /( ) ( )
( )
( ) / /
( )( )
t ga r
f f t g
t g fa r
f t g f t g f
t g fa r
f t
c Ic
g f t
Pc
P I
P I
P I
g I
I
P fI P
KKV s V s
sL R KK
s KK LV s V s
s s R KK L KK L
Con efiltro
s KK LV s V s
s s R KK
K s KK s K
K s s
K K
K K
K K
K
K
sK K LKKK L
19/04/23 FIEC 41
Vr(t)
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
El sistema será ajustado para: Sobrenivel Porcentual de 5% Tiempo de Estabilización de 10
seg. La simulación será realizada
con la herramienta de MATLAB denominada SISO.
19/04/23 FIEC 42

FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
El sistema será ajustado para: Sobrenivel Porcentual de 5% Tiempo de Estabilización de
10 seg. La simulación será
realizada con la herramienta de MATLAB denominada SISO.
19/04/23 FIEC 43
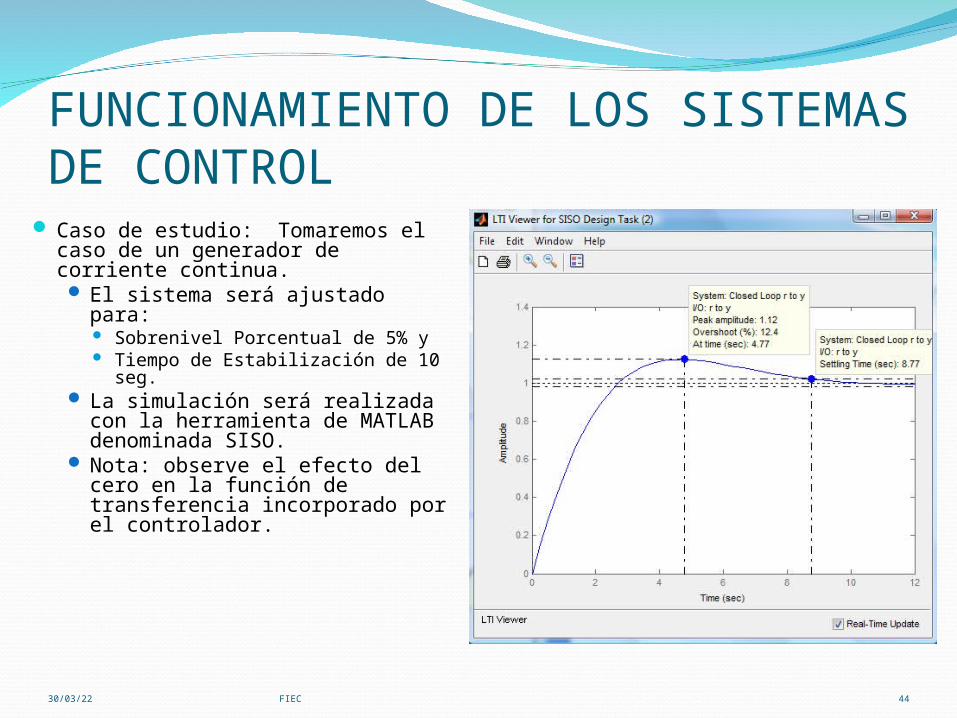
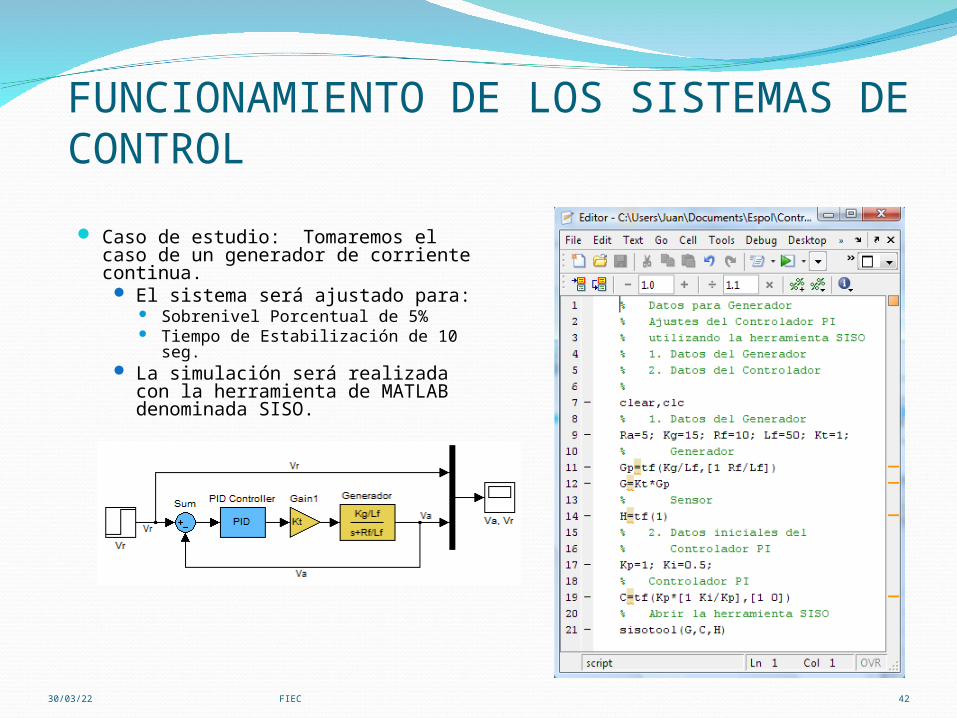
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua. El sistema será ajustado para:
Sobrenivel Porcentual de 5% y Tiempo de Estabilización de 10
seg. La simulación será realizada
con la herramienta de MATLAB denominada SISO.
Nota: observe el efecto del cero en la función de transferencia incorporado por el controlador.
19/04/23 FIEC 44
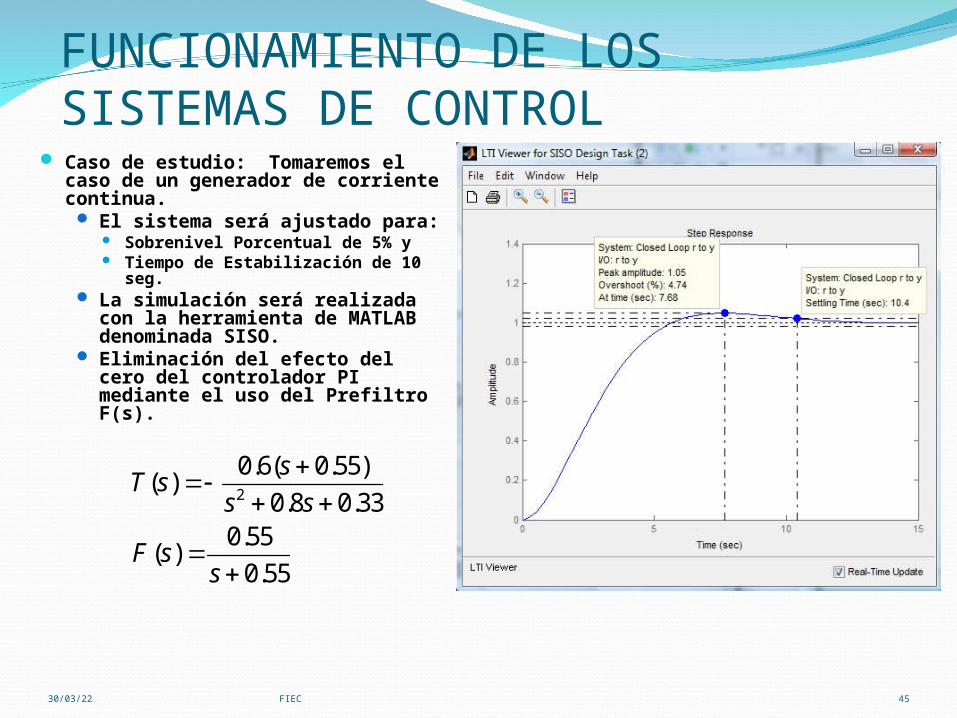
FUNCIONAMIENTO DE LOS SISTEMAS DE CONTROL
Caso de estudio: Tomaremos el caso de un generador de corriente continua.
El sistema será ajustado para: Sobrenivel Porcentual de 5% y Tiempo de Estabilización de 10
seg. La simulación será realizada
con la herramienta de MATLAB denominada SISO.
Eliminación del efecto del cero del controlador PI mediante el uso del Prefiltro F(s).
2
0.6( 0.55)( )
0.8 0.330.55
( )0.55
sT s
s s
F ss
19/04/23 FIEC 45

















