Resumen El presente trabajo de investigación trata sobre el control PD y PID para el seguimiento de trayectoria de un manipulador robótico de 4 grados de libertad, a partir del modelo Kuka reducido. Se realiza una sintonización manual de las ganancias de nuestro controlador. Para ello se hace uso de la herramienta HEMERO desarrollado por aficionados a la robótica para poder realizar un eficiente y seguro control de nuestro robot. Más no se pretenderá introducirse exhaustivamente en el diseño dinámico del mismo. Palabras Claves: control PID, dinámica eléctrica, sintonización PID, Toolbox Hemero. Fig. Robot Kuka Cinemática Directa Procedemos a calcular los parámetros D-H del manipulador para utilizar las matrices de transformación y encontrar la posición del efector final. Estas ecuaciones son la base para desarrollar las simulaciones y observar la trayectoria que sigue el manipulador al utilizar diversos algoritmos en su control. No 1 q1 0° 0 0 2 q2 90° 0 L1 3 q3 0° 0 L2 4 q4 90° 0 L3 Siendo L1 la distancia vertical l entre origen 1 y origen 0. FIG. Robot Kuka Reducido
Transcript
Resumen
El presente trabajo de investigación trata sobre el control
PD y PID para el seguimiento de trayectoria de un
manipulador robótico de 4 grados de libertad, a partir del
modelo Kuka reducido. Se realiza una sintonización manual
de las ganancias de nuestro controlador. Para ello se hace
uso de la herramienta HEMERO desarrollado por
aficionados a la robótica para poder realizar un eficiente y
seguro control de nuestro robot. Más no se pretenderá
introducirse exhaustivamente en el diseño dinámico del
mismo.
Palabras Claves: control PID, dinámica eléctrica,
sintonización PID, Toolbox Hemero.
Fig. Robot Kuka
Cinemática Directa
Procedemos a calcular los parámetros D-H del manipulador para utilizar las matrices de transformación y encontrar la posición del efector final. Estas ecuaciones son la base para desarrollar las
simulaciones y observar la trayectoria que sigue
el manipulador al utilizar diversos algoritmos en
su control.
No
1 q1 0° 0 0
2 q2 90° 0 L1
3 q3 0° 0 L2
4 q4 90° 0 L3
Siendo L1 la distancia vertical l entre origen 1 y
origen 0.
FIG. Robot Kuka Reducido
Modelo del servomecanismo
Aquí se puede observar los encoders y
actuadores de nuestro Kuka reducido
Dinámica
En esta parte procedemos a calcular el modelo dinámico de nuestro manipulador. = + ( , )+ ( )
: Fuerzas y torques en los actuadores. : Matriz cuadrada de inercias. : Matriz columna de fuerzas de coriolis. : Matriz columna de gravedad.
Primero se calcula el tensor de inercia. =
( + )
Principio del control PD
1) Control PD con realimentación de la
aceleración,velocidad y posición (Bucle
cerrado):
Resultados:
Para:
Kp=[25 0 0 0;0 250 0 0;0 0 25 0;0 0 0 25];
Kv=[10 0 0 0;0 100 0 0;0 0 10 0;0 0 0 10];
a)Trayectorias seguidas teoricamente
b) Error en la posición
Fig.Se puede observar que el articulacion medida
desde la base posee un gran margen de error.
c) Torques ejercidos en las juntas
Se puede observar claramente que el torque
ejercido en la primera articulacion es la mas alta,
esto debido a que esta ultima soporta toda la
estructura, debiendo por ende ser mas rigido.
Se muestran en la Fig. los resultados cualitativos
alcanzados en la evolucion temporaldel sistema
controlado segun diversos valores de las
ganancias de realimentacion de velocidady
posición que confirman las explicaciones
anteriores. El aumento o disminución
desobreoscilación, tiempo de subida, tiempo de
pico, tiempo de establecimiento, etc. Se
puedejustificar analíticamente.
2) CONTROL PD (CONTROL DE
POSICION)(bucle abierto)
El modelo para el control PD es de la
siguiente forma:
3) Control PD con compensación de la
gravedad
En este caso el vertorgravity será nulo.
El control PD con compensación deseada de
gravedad para robots manipuladores fue
propuesto por primera vez por Takegaki y
Arimoto (1981) para robots que sólo cuentan con
uniones rotativas. En ese trabajo se demostró
que el equilibrio deseado es globalmente
asintóticamente estable si la ganancia
Proporcional es suficientemente grande en algún
sentido. Posteriormente, Tomei (1991) mostró
que una condición suficiente para conseguir este
resultado es que la menor ganancia proporcional
sea mayor que la norma de la matriz Jacobiana
del vector de pares gravitacionales. Este
resultado es el que hasta ahora ofrece la mejor
estimación de las ganancias proporcionales que
aseguran la solución del problema.
Resultados obtenidos utilizando el
control PD con compensación de la
gravedad
Para:
Kp=[25 0 0 0;0 250 0 0;0 0 25 0;0 0 0 25];
Kv=[10 0 0 0;0 100 0 0;0 0 10 0;0 0 0 10];
a)Trayectorias seguidas teoricamente
b) Error en la posición
c)Torques ejercidos en las juntas
DIFERENCIAS ENTRE LOS DIFERENTES TIPOS DE
CONTROL PD
Para el control PD con realimentación de
estados(Primer caso) se puede observar que para
mayores valores de las ganancias el sistemas
responderá mas rápidamente pero esto
involucrara mayor esfuerzo por parte de los
actuadores.En el caso del control PD con
compensación de la gravedad se demostró la
existencia y unicidad del punto de equilibrio. Con
estas nuevas condiciones se hace posible el uso
de ganancias proporcionales menores que los
esquemas anteriores.
Es más estas ganancias son cada vez menores
cuando la articulación se encuentra en el extremo
final del robot.
Desde el punto de vista práctico se permiten
utilizar cambios más grandes en la posición
deseada sin que los actuadores se saturen.
Contrariamente hasta lo que se creía hasta
ahora, se ha demostrado que para asegurar la
estabilidad asintótica global no es necesario exigir
que la dinámica eléctrica de los actuadores sea
rápida, comparada con la parte mecánica del
sistema.
Además también se ha demostrado que el
análisis y el diseño no son complicados a pesar de
la presencia de una dinámica eléctrica entre la
señal de control y el par aplicado a los eslabones.
En este sentido es importante señalar que las
complicaciones encontradas para tomar en
consideración la dinámica eléctrica de los
actuadores habían evitado hasta ahora que se
presente el reporte de este trabajo.
Principio de control PID Para el estudio se realiza el control individual de cada
elemento.
= − + − + − =
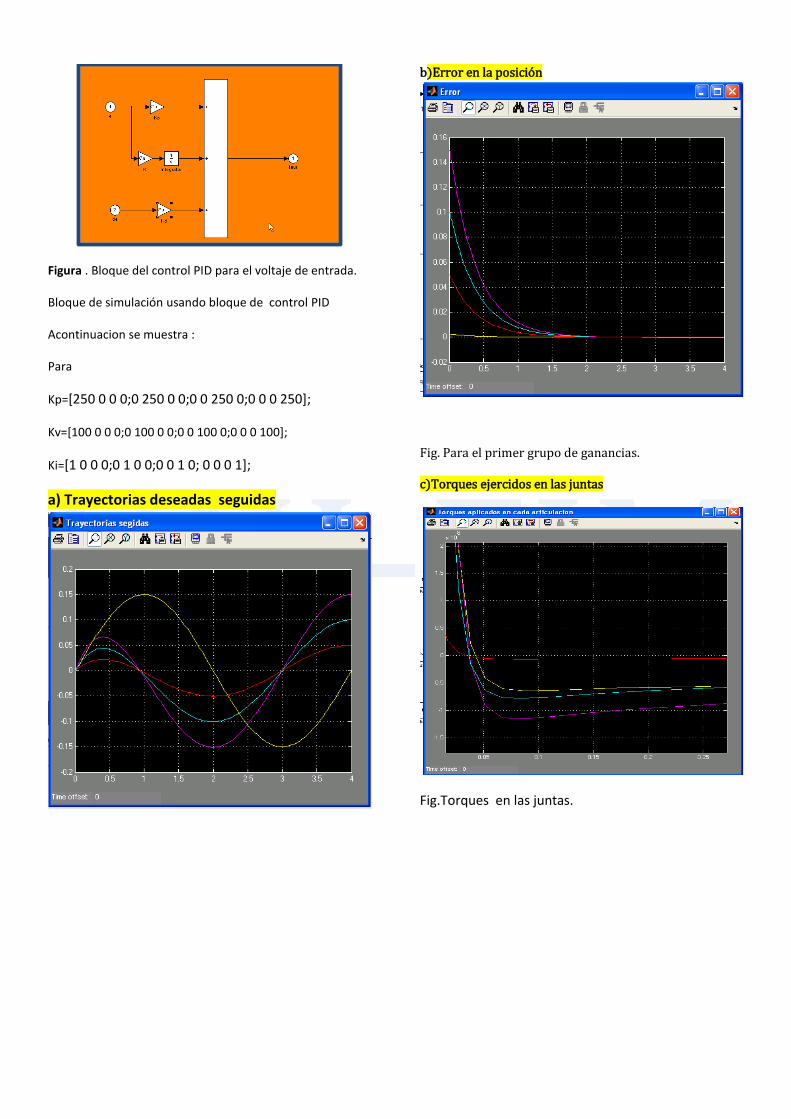
Figura . Bloque del control PID para el voltaje de entrada.
Bloque de simulación usando bloque de control PID
Acontinuacion se muestra :
Para
Kp=[250 0 0 0;0 250 0 0;0 0 250 0;0 0 0 250];
Kv=[100 0 0 0;0 100 0 0;0 0 100 0;0 0 0 100];
Ki=[1 0 0 0;0 1 0 0;0 0 1 0; 0 0 0 1];
a) Trayectorias deseadas seguidas
b)Error en la posición
Fig. Para el primer grupo de ganancias.
c)Torques ejercidos en las juntas
Fig.Torques en las juntas.
CONTROL DE MANIPULADORES CON APRENDIZAJE
La convergencia del filtro depende de u.El filtro es no casual pero puede implantarse empleando todos los errores registrados en la iteración anterior del algoritmo. En la siguiente figura se muestra un esquema en el que se ilustra un control mediante aprendizaje.
FIG.CONTROL POR APRENDIZAJE
DE NUESTRO MANIPULADOR
FIG.CONTROL SIMPLE PD
TRAYECTORIA
ERROR CON APRENDIZAJE
ERROR SIMPLE PD
TORQUES:
CON APRENDIZAJE
TORQUE CON SIMPLE PD
Conclusiones
En Control PD
- Un aspecto interesante es el verificar que el robot debe posicionarse en la configuración deseada a pesar de los efectos de la gravedad, por esta razón se decidió diseñar un robot que pueda tener movimientos en planos verticales; el diseño del robot es de configuración angular (brazo articulado) con un entorno de trabajo más amplio que el de otras configuraciones, además es un mecanismo que está totalmente acoplado, es decir, los movimientos de cada articulación tienen efectos sobre todas las demás articulaciones, por lo que resulta como un problema de control interesante.
- El robot construido es de arquitectura abierta con el fin de poder utilizar cualquier controlador de robots. Esto es muy importante porque actualmente existen una gran cantidad de controladores propuestos, es conveniente que se pueda experimentar con cualquiera de estos algoritmos y así ganar experiencia en cuanto a las ventajas y desventajas de los diferentes esquemas de control existentes para robots.
- Con el fin de conseguir esto, el robot es programado y controlado usando una computadora personal y un programa escrito en lenguaje C++. Además, se usa una tarjeta adquisitora de datos comercial como interfase entre la computadora y el robot. Con el fin de apreciar el desempeño obtenido se decidió utilizar un controlador PD más compensación de gravedad, por lo que no es necesario utilizar la parte integral para obtener una buena respuesta de control y esto se debe a que se utilizó el término de la gravedad que hace al control eficiente.
- .El modelo de pares gravitacionales queda expresado en función de masas, longitudes y parámetros eléctricos difíciles de medir, por lo que se tendría que desarmar el robot para medir cada uno de estos parámetros; por esta razón en este trabajo hemos evitado hacer dichas mediciones, mediante experimentos que permitan expresar el modelo de pares gravitacionales en función de voltajes conocidos.
- Una ventaja de esta técnica que se utilizó es que si el robot cambia el peso de alguno de sus eslabones o dimensiones, es posible recalcular el modelo de pares gravitacionales solamente experimentando con configuraciones en reposo para dejar su modelo matemático en función de voltajes. La compensación de gravedad es muy útil para mejorar el funcionamiento del robot, sin exponerlo a esfuerzos de pares indebidos de sus motores.
En CONTROL PID
- En la elaboración de esta monografía se aprendió el proceso correcto de importación de los modelos CAD de Solidwork hacia el Simulink y a partir de este logramos simular el movimiento del robot Kuka que diseñamos.
- Fue necesario aplicar un sistema de tipo
lazo cerrado o realimentado a los actuadores que se colocan en los bloques que representan las articulaciones del robot en el software Simulink
- Con el software simulink es posible
implementar y luego simular cualquier tipo de sistema de control, para luego apreciar los errores en estado estable que puedan suceder.
- El incremento de la velocidad de recorrido
requiere una reducción de los tiempos de asentamiento, sin embargo, al no modificar los parámetros del PID principalmente los Kd y Kp que están
relacionados con los tiempos de corrección del controlador, los resultados reales mostrará diferencias con respecto a la deseada incrementándose éstas a medida que la velocidad aumente Luego de modificar los Kd y Kp, se observó que, el Kp depende directamente con el cuadrado de la velocidad de recorrido y el Kd de manera proporcional. Los resultados de modificar los parámetros de acuerdo a esta ley se observan.
- Si bien el sistema controlado con
desacople de la matriz H, C y G queda
aliviado de toda la dinámica acoplada de
los eslabones y sus principales
propiedades físicas normales, el torque de
control queda directamente proporcional
a los valores de aceleraciones angulares
en cada junta, las cuales se incrementarán
al incrementarse la velocidad de recorrido
especificada por el usuario.
-
- En CONTROL CON APRENDISAJE
- Los resultados de la simulación
demuestran un buen funcionamiento del controlador propuesto. Se destaca como principal ventaja la habilidad del control con aprendizaje el de aproximar funciones no lineales desconocidas.
- Como principal desventaja se destacan: La lentitud del algoritmo de entrenamiento, problema solucionable con la utilización de otros algoritmos más eficientes. Y la necesidad de entrenar nuevamente la red ante trayectorias deseadas diferentes.Actualmente se prevé analizar la posibilidad de implementación en un robot de dos GDL´s para comprobar los resultados teóricos. Se pretende utilizar un hardware especial de control con múltiples entradas/salidas tanto digitales como analógicas que puede conectarse al Bus PCI de una PC estándar.
-
- AGRADECIMIENTOS
- Los autores agradecen el apoyo recibido por parte del instructor por la enseñanza prestada..