Desafío de Redirección de la Carretera Sistemas de Tecnología: Desafíos Integrados de Ingeniería Paquete de Desafío v2.0 1 Miembros de equipo: 1. 3. 2. 4. Resumen del desafío En este desafío, los equipos desarrollarán una sección de carretera de puente que puede girar 90º al mando. Los equipos utilizarán el sensor de ángulo y el monitor serial para observar los datos en tiempo real que se aplicarán directamente al desafío. Haga clic aquí para explorar toda la biblioteca curricular de Kid Spark. Objetivos de aprendizaje y alineamiento NGSS Diseñar un sistema mecánico que gire una sección de la carretera 90º. Crear un esquema/programa que se pueda cargar en el ROKduino y se utilice para controlar la carretera. Demostrar/presentar un prototipo de trabajo a sus compañeros. Práctica científica y de ingeniería- Analizar y usar datos Conceptos transversales - Sistemas y modelos de sistemas Escenario Hay un puente único fuera de Spark City que cuenta con una sección de carretera que puede girar 90º. Los vehículos pueden conducir hacia la carretera y esta girará 90º antes de que el vehículo pueda conducir con seguridad hacia el otro lado. Recientemente, el sistema mecánico que gira el puente dejó de funcionar, por lo que la ciudad está buscando instalar un nuevo sistema que permita que el puente funcione constantemente bien. Desafío de diseño e Ingeniería Su reto es desarrollar un sistema mecánico que se pueda conectar a la sección central de la carretera del puente, y pueda girar la carretera 90º. Su equipo será responsable de diseñar el sistema mecánico que se adhiere a la carretera, así como de crear un programa/esquema que se pueda cargar en el ROKduino y se utilice para controlar la carretera giratoria. *Las instrucciones de construcción para montar el puente y la sección de la carretera media se encuentran en la página 3. Tiempo de actividad: 120 - 180 Minutos Nivel de grado objetivo: 6 - 8 Agrupación de estudiantes: Equipos de hasta 4 Materiales adicionales de la lección: - Plan de Lección del Instructor - Video de ejemplos de soluciones Laboratorio STEM Móvil de Kid Spark: Engineering Pathways Unidades de Kid Spark requeridas: Aplicaciones en Diseño & Ingeniería Sistemas de Tecnología Fundamentos de Kid Spark Máquinas Compuestas Prototipado rápido & Impresión 3D Robotica & Codificación 101 Robotica & Codificación - Sensor Deep Dive Desafíos Integrados de Ingeniería Máquinas Simples Carretera giratoria
Transcript
Desafío de Redirecciónde la Carretera
Sistemas de Tecnología: Desafíos Integrados de Ingeniería Paquete de Desafíov2.0
1
Miembros de equipo:
1. 3.
2. 4.
Resumen del desafíoEn este desafío, los equipos desarrollarán una sección de carretera de puente que puede girar 90º al mando. Los equipos utilizarán el sensor de ángulo y elmonitor serial para observar los datos en tiempo real que se aplicarán directamente al desafío.
Haga clic aquí para explorar toda la biblioteca curricular de Kid Spark.
Objetivos de aprendizaje y alineamiento NGSS Diseñar un sistema mecánico que gire una sección de la carretera 90º. Crear un esquema/programa que se pueda cargar en el ROKduino y se utilice para controlar la carretera. Demostrar/presentar un prototipo de trabajo a sus compañeros.
Práctica científica y de ingeniería- Analizar y usar datos Conceptos transversales - Sistemas y modelos de sistemas
EscenarioHay un puente único fuera de Spark City que cuenta con una sección de carretera que puede girar 90º. Los vehículos pueden conducir hacia la carretera y esta girará 90º antes de que el vehículo pueda conducir con seguridad hacia el otro lado. Recientemente, el sistema mecánico que gira el puente dejó de funcionar, por lo que la ciudad está buscando instalar un nuevo sistema que permita que el puente funcione constantemente bien.
Desafío de diseño e IngenieríaSu reto es desarrollar un sistema mecánico que se pueda conectar ala sección central de la carretera del puente, y pueda girar la carretera90º. Su equipo será responsable de diseñar el sistema mecánicoque se adhiere a la carretera, así como de crear un programa/esquema que se pueda cargar en el ROKduino y se utilice para controlar lacarretera giratoria.
*Las instrucciones de construcción para montar el puente y la sección de la carretera media se encuentran en la página 3.
Tiempo de actividad: 120 - 180 Minutos
Nivel de grado objetivo:6 - 8
Agrupación de estudiantes: Equipos de hasta 4
Materiales adicionales de la lección: - Plan de Lección del Instructor- Video de ejemplos de soluciones
Laboratorio STEM Móvil de Kid Spark:Engineering Pathways
Criterios y restricciones del desafío1. Los equipos deben trabajar en cada paso del proceso Diseño & Ingeniería de Kid Spark (ver página 5), para diseñar, crear prototipos y perfeccionar un sistema de carretera con un puente giratorio.
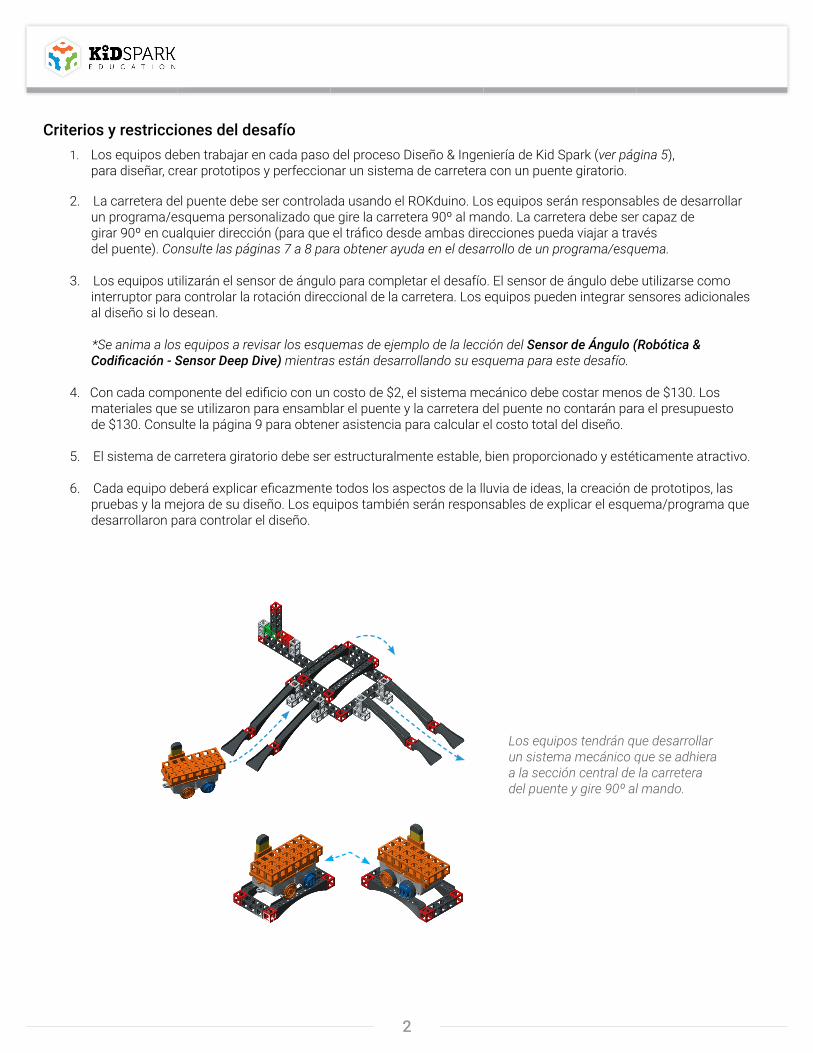
2. La carretera del puente debe ser controlada usando el ROKduino. Los equipos serán responsables de desarrollar un programa/esquema personalizado que gire la carretera 90º al mando. La carretera debe ser capaz de girar90ºencualquierdirección(paraqueeltráficodesdeambasdireccionespuedaviajaratravés del puente). Consulte las páginas 7 a 8 para obtener ayuda en el desarrollo de un programa/esquema.
3. Los equipos utilizarán el sensor de ángulo para completar el desafío. El sensor de ángulo debe utilizarse como interruptor para controlar la rotación direccional de la carretera. Los equipos pueden integrar sensores adicionales al diseño si lo desean. *Se anima a los equipos a revisar los esquemas de ejemplo de la lección del Sensor de Ángulo (Robótica & Codificación-SensorDeepDive) mientras están desarrollando su esquema para este desafío.
4.Concadacomponentedeledificioconuncostode$2,elsistemamecánicodebecostarmenosde$130.Los materiales que se utilizaron para ensamblar el puente y la carretera del puente no contarán para el presupuesto de$130.Consultelapágina9paraobtenerasistenciaparacalcularelcostototaldeldiseño.
6.Cadaequipodeberáexplicareficazmentetodoslosaspectosdelalluviadeideas,lacreacióndeprototipos,las pruebasylamejoradesudiseño.Losequipostambiénseránresponsablesdeexplicarelesquema/programaque desarrollaron para controlar el diseño.
Los equipos tendrán que desarrollar un sistema mecánico que se adhiera a la sección central de la carretera del puente y gire 90º al mando.
3
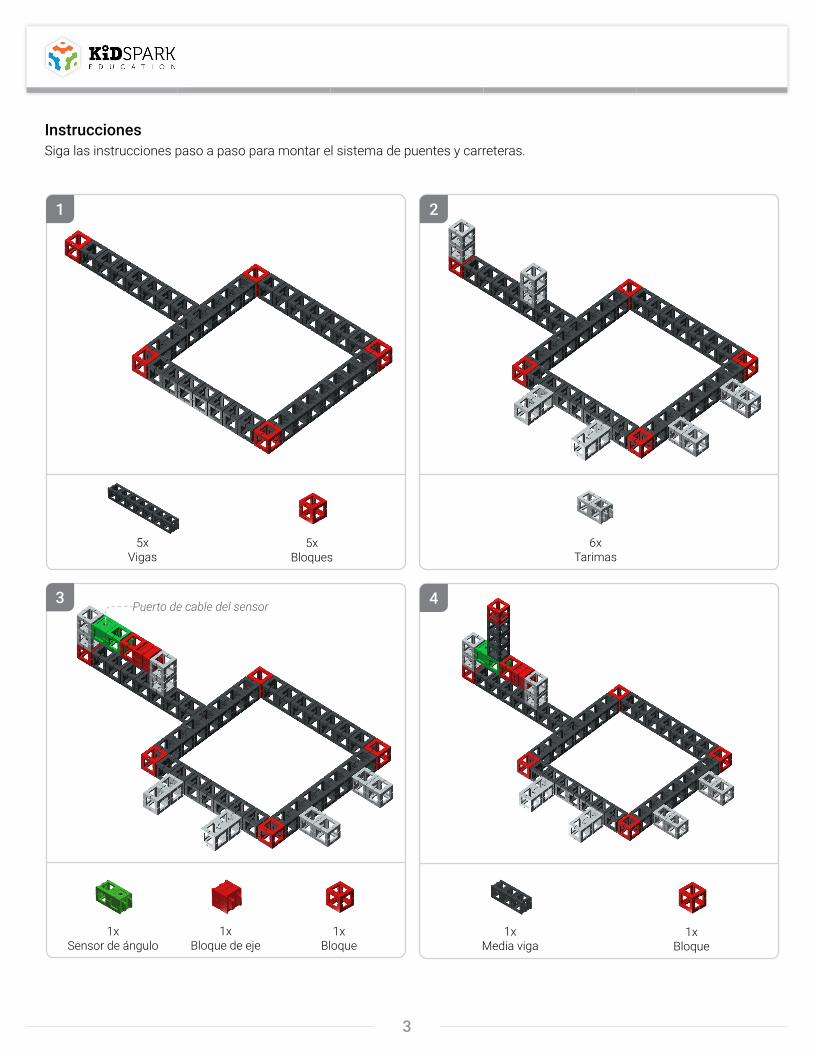
InstruccionesSiga las instrucciones paso a paso para montar el sistema de puentes y carreteras.
1 2
5x Vigas
5x Bloques
3
1x Bloque
4
1x Bloque
Puerto de cable del sensor
6x Tarimas
1x Sensor de ángulo
1x Bloque de eje
1x Media viga
4
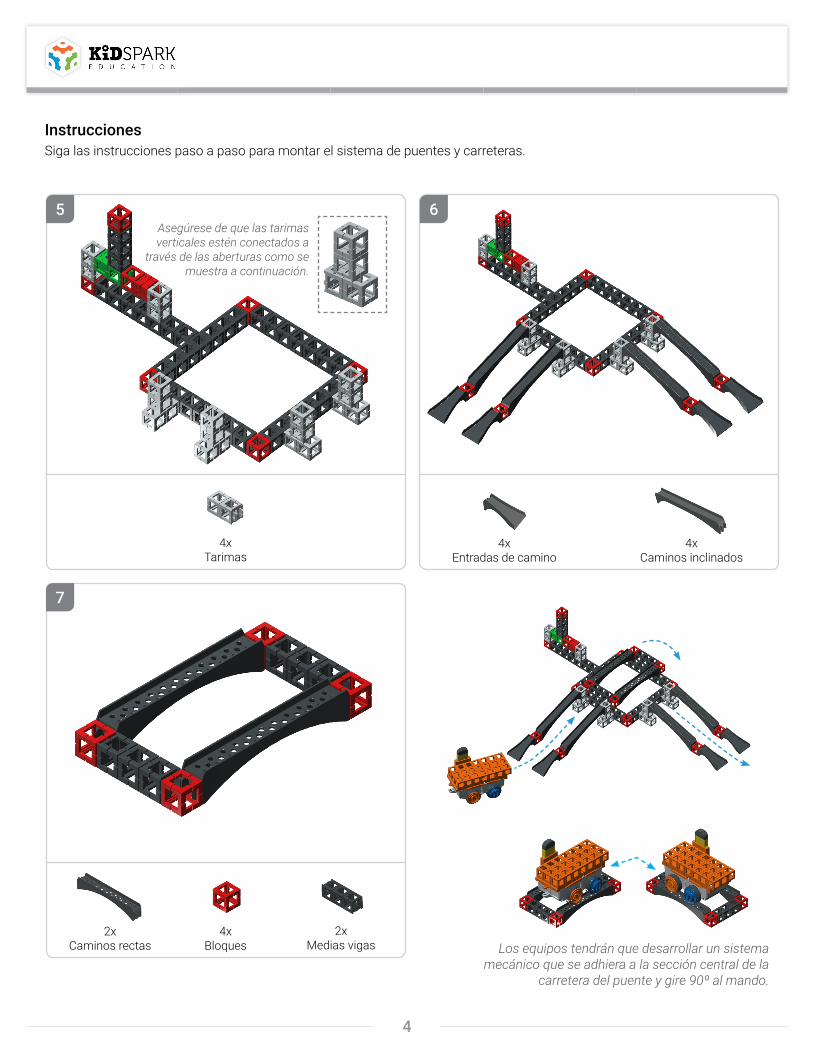
InstruccionesSiga las instrucciones paso a paso para montar el sistema de puentes y carreteras.
5 6
Los equipos tendrán que desarrollar un sistema mecánico que se adhiera a la sección central de la
carretera del puente y gire 90º al mando.
4x Entradas de camino
7
4x Bloques
Asegúrese de que las tarimas verticales estén conectados a
través de las aberturas como se muestra a continuación.
4x Tarimas
4x Caminos inclinados
2x Caminos rectas
2x Medias vigas
5
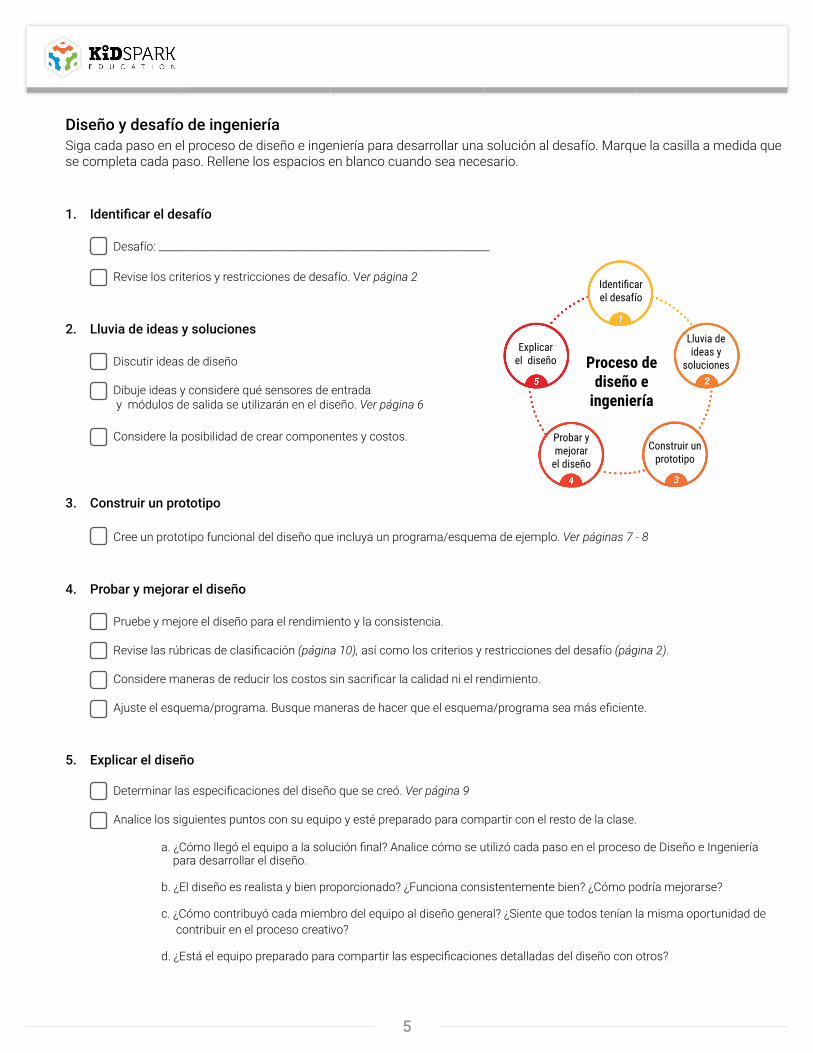
Diseño y desafío de ingenieríaSiga cada paso en el proceso de diseño e ingeniería para desarrollar una solución al desafío. Marque la casilla a medida que se completa cada paso. Rellene los espacios en blanco cuando sea necesario.
Analicelossiguientespuntosconsuequipoyestépreparadoparacompartirconelrestodelaclase. a.¿Cómollegóelequipoalasoluciónfinal?AnalicecómoseutilizócadapasoenelprocesodeDiseñoeIngeniería para desarrollar el diseño.
Pizarrón de ideasUtilice el espacio que se proporciona a continuación para esbozar ideas de diseño. Asegúrese de tener en cuenta el sistema mecánico,asícomoquésensoresymódulosdesalidaquedeseaincluireneldiseño.
Salidas
Módulo de motor
Módulo de luz
Sensor de luz
Sensor receptor IR
Transmisor IR Baja Potencia
Transmisor IR Alta Potencia
Sensor ROK-Star
Sensor de contacto Sensor de ángulo
Pizarrón
7
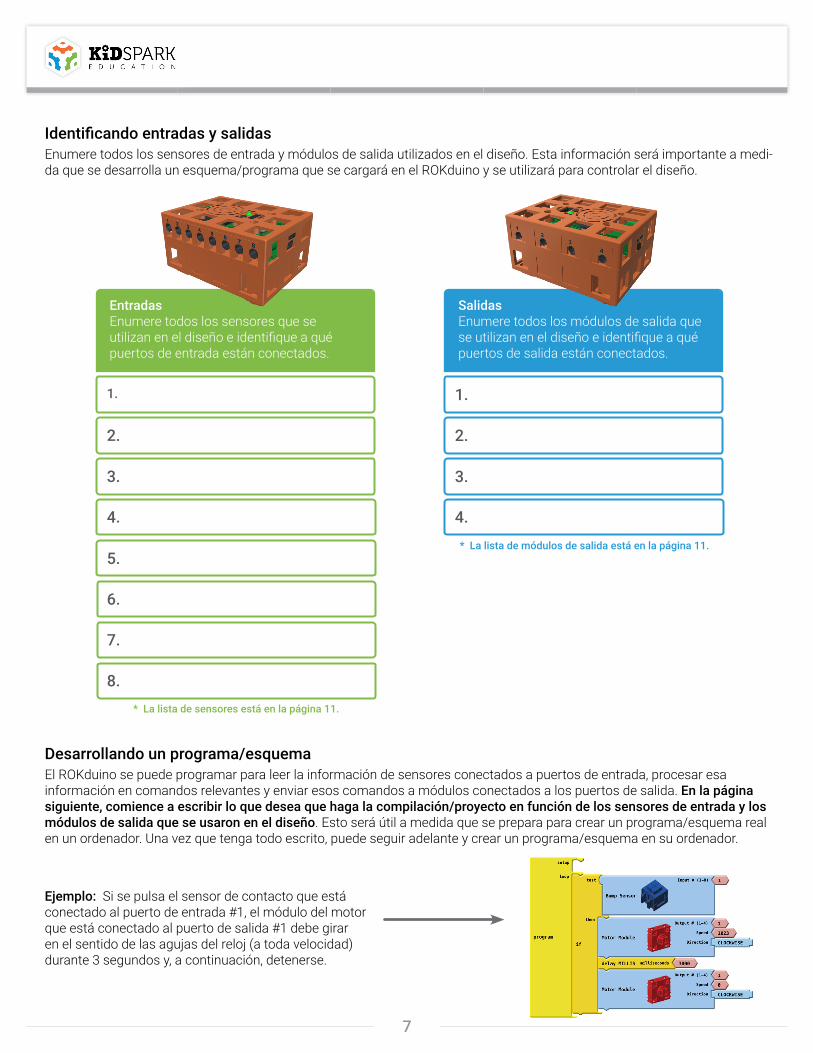
Identificando entradas y salidasEnumere todos los sensores de entrada y módulos de salida utilizados en el diseño. Esta información será importante a medi-da que se desarrolla un esquema/programa que se cargará en el ROKduino y se utilizará para controlar el diseño.
EntradasEnumere todos los sensores que se utilizaneneldiseñoeidentifiqueaquépuertos de entrada están conectados.
SalidasEnumere todos los módulos de salida que seutilizaneneldiseñoeidentifiqueaquépuertos de salida están conectados.
1.
2.
3.
4.
5.
6.
7.
8.
1.
2.
3.
4.
Desarrollando un programa/esquemaEl ROKduino se puede programar para leer la información de sensores conectados a puertos de entrada, procesar esa información en comandos relevantes y enviar esos comandos a módulos conectados a los puertos de salida. En la página siguiente, comience a escribir lo que desea que haga la compilación/proyecto en función de los sensores de entrada y los módulos de salida que se usaron en el diseño. Esto será útil a medida que se prepara para crear un programa/esquema real en un ordenador. Una vez que tenga todo escrito, puede seguir adelante y crear un programa/esquema en su ordenador.
Ejemplo: Si se pulsa el sensor de contacto que está conectado al puerto de entrada #1, el módulo del motor que está conectado al puerto de salida #1 debe girar en el sentido de las agujas del reloj (a toda velocidad) durante 3 segundos y, a continuación, detenerse.
* La lista de sensores está en la página 11.
* La lista de módulos de salida está en la página 11.
8
Desarrollando un programa/esquemaEscriba lo que desea que haga su compilación/proyecto en función de los sensores de entrada y los módulos de salida que se utilizaron en el diseño. Una vez que haya terminado, puede utilizar esta información para empezar a crear el programa/esquema real en su ordenador.
*Si los equipos tienen problemas para desarrollar un boceto, intente revisar los bocetos de ejemplo de las lecciones de robótica anteriores de Kid Spark.
9
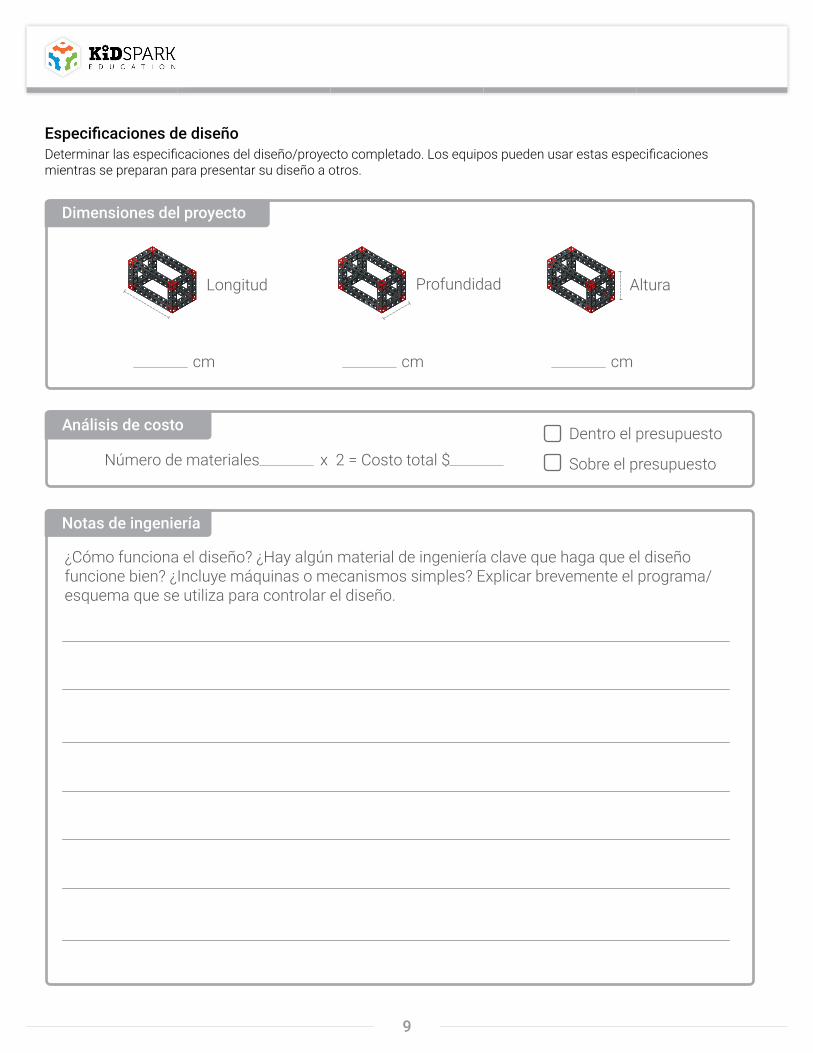
Especificaciones de diseñoDeterminarlasespecificacionesdeldiseño/proyectocompletado.Losequipospuedenusarestasespecificacionesmientras se preparan para presentar su diseño a otros.
cm
Número de materiales x2=Costototal$
Project Dimensions
¿Cómofuncionaeldiseño?¿Hayalgúnmaterialdeingenieríaclavequehagaqueeldiseñofuncionebien?¿Incluyemáquinasomecanismossimples?Explicarbrevementeelprograma/esquema que se utiliza para controlar el diseño.
Longitud Profundidad Altura
cm cm
Dimensiones del proyecto
Análisis de costo
Notas de ingeniería
Dentro el presupuesto
Sobre el presupuesto
10
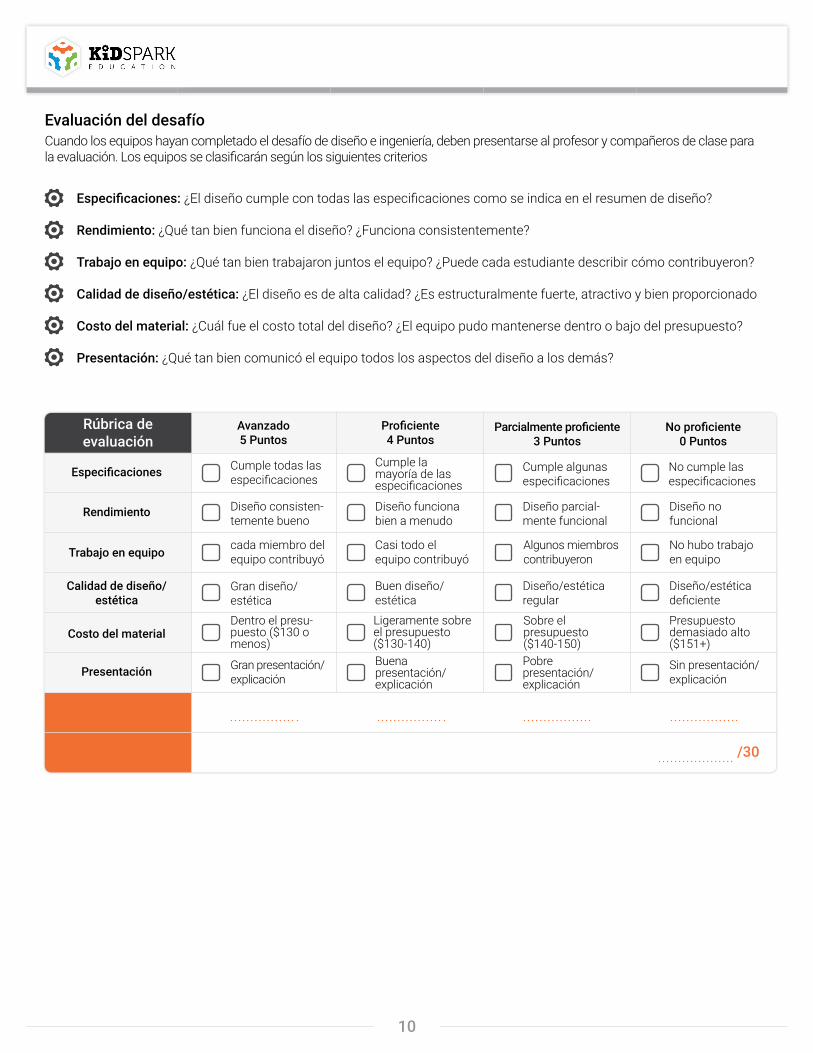
Evaluación del desafíoCuando los equipos hayan completado el desafío de diseño e ingeniería, deben presentarse al profesor y compañeros de clase para laevaluación.Losequiposseclasificaránsegúnlossiguientescriterios
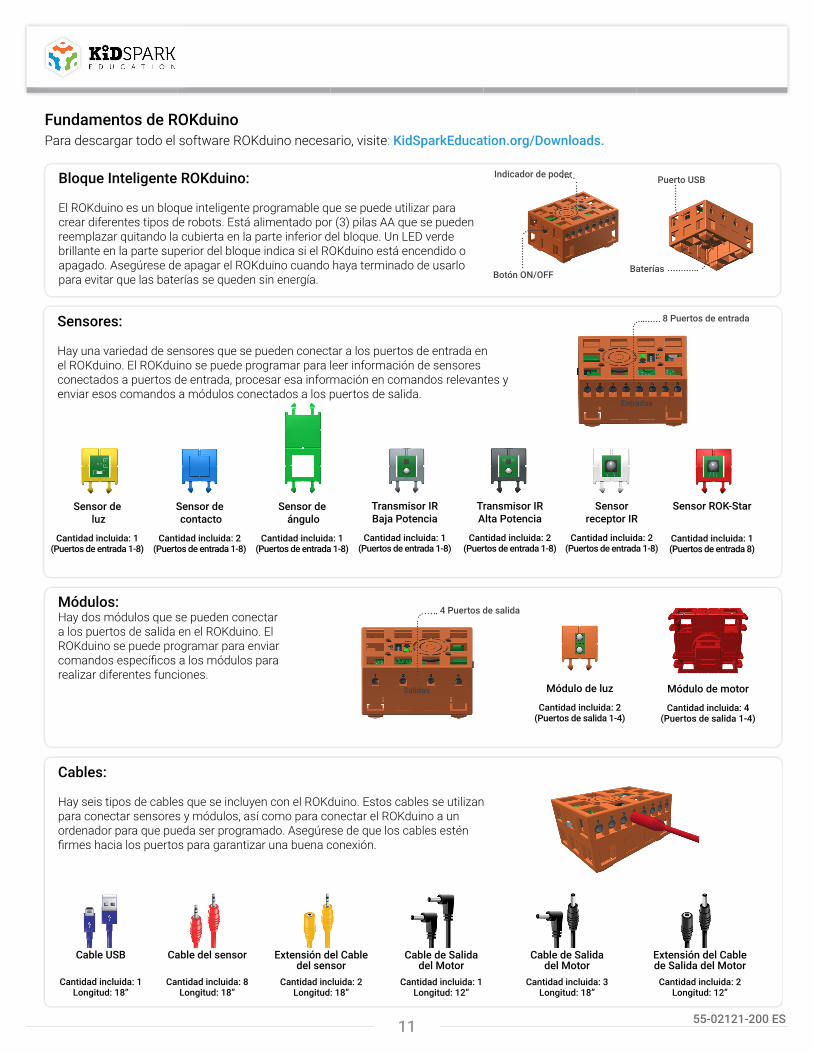
Fundamentos de ROKduinoPara descargar todo el software ROKduino necesario, visite: KidSparkEducation.org/Downloads.
Bloque Inteligente ROKduino:
El ROKduino es un bloque inteligente programable que se puede utilizar para crear diferentes tipos de robots. Está alimentado por (3) pilas AA que se pueden reemplazar quitando la cubierta en la parte inferior del bloque. Un LED verde brillante en la parte superior del bloque indica si el ROKduino está encendido o apagado. Asegúrese de apagar el ROKduino cuando haya terminado de usarlopara evitar que las baterías se queden sin energía.
Indicador de poder
Botón ON/OFF
Sensores:
Hay una variedad de sensores que se pueden conectar a los puertos de entrada en el ROKduino. El ROKduino se puede programar para leer información de sensores conectados a puertos de entrada, procesar esa información en comandos relevantes y enviar esos comandos a módulos conectados a los puertos de salida.
Sensor de luz
Cantidad incluida: 1(Puertos de entrada 1-8)
Sensor de contacto
Cantidad incluida: 2(Puertos de entrada 1-8)
Sensor de ángulo
Cantidad incluida: 1(Puertos de entrada 1-8)
Transmisor IRBaja Potencia
Cantidad incluida: 1(Puertos de entrada 1-8)
Transmisor IRAlta Potencia
Cantidad incluida: 2(Puertos de entrada 1-8)
Sensor receptor IR
Cantidad incluida: 2(Puertos de entrada 1-8)
Sensor ROK-Star
Cantidad incluida: 1(Puertos de entrada 8)
8 Puertos de entrada
Módulos:Hay dos módulos que se pueden conectar a los puertos de salida en el ROKduino. El ROKduino se puede programar para enviar comandosespecíficosalosmódulospararealizar diferentes funciones.
Módulo de luz
Cantidad incluida: 2(Puertos de salida 1-4)
Módulo de motor
Cantidad incluida: 4(Puertos de salida 1-4)
Cables:
Hay seis tipos de cables que se incluyen con el ROKduino. Estos cables se utilizan para conectar sensores y módulos, así como para conectar el ROKduino a un ordenadorparaquepuedaserprogramado.Asegúresedequeloscablesesténfirmeshacialospuertosparagarantizarunabuenaconexión.