84
DISEÑO DE FILTROS DIGITALES

DISEÑO DE FILTROS DIGITALES

Filtros Digitales
INCONVENIENTES:• Limitación de velocidad• Efectos de la longitud finita de las palabras• Tiempos de diseño y desarrollo
VENTAJAS:
• Características imposibles con filtros analógicos (fase lineal)• No cambian cualquiera que sea el entorno• Procesamiento de varias señales con un único filtro• Posibilidad de almacenar datos• Repetitividad• Uso en aplicaciones de muy bajas frecuencias
Algoritmo implementado sobre hardware que opera sobre señales analógicas digitalizadas o sobre señales digitales almacenadas.

Filtros Digitales- Clasificación de los Filtros Digitales.
- IIR : Respuesta al Impulso Infinita.
- FIR : Respuesta al Impulso Finita.
[ ] [ ] [ ]∑∞
=−=
0kknxkhny [ ] [ ] [ ]∑ ∑
= =
−+−=M
k
N
kkk knyaknxbny
0 1( )
∑
∑
=
−
=
−
−
= N
k
kk
M
k
kk
za
zbzH
1
0
1
[ ] [ ] [ ]∑=
−=M
kknxkhny
0[ ] [ ] [ ]∑
=−δ⋅=
M
kknkhnh
0( ) [ ]∑
=
−⋅=M
k
kzkhzH0

Filtros Digitales
a. Especificación de las Características del filtro.
b. Cálculo de los Coeficientes. Diferentes métodos.
c. Elección de la Estructura. Realización.
d. Análisis de los Efectos de Precisión Finita.
e. Implementación del filtro mediante software y/o hardware adecuado.
PASOS EN EL DISEÑO DE FILTROS:

Filtros Digitales- Especificación de las Características del filtro.
( ) ( )( )
( ) ( ) ( )( ) ( ) ( )inadalimebandalaenmínimaAtenuaciónlogdBs
pasodebandalaenmáximaAtenuaciónlogdBs
Hlog)(H
logdBs
a
p
2
1
20
120
20120
δ⋅−=α
δ−⋅−=α
Ω⋅−=Ω
⋅=α
( ) ( )
( ) ( ) ( )inadalimebandalaenmínimaAtenuaciónlogdBs
pasodebandalaenrizadologdBsr
aa
p
pp
δ⋅−=α
⎟⎟⎠
⎞⎜⎜⎝
⎛
δ+
δ−⋅−=
20
11
20

RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (I)
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
ω>ω
π>ω
ω<ω
π<ωΩ
=ωω=Ω
2;0
2;
ss
ss
Teff
óT
óT
HH
s
( ) ( ) π<Ω⎟⎟⎠
⎞⎜⎜⎝
⎛ Ω=ω=Ω Ω
=ω;
seff
Teff T
HHHs
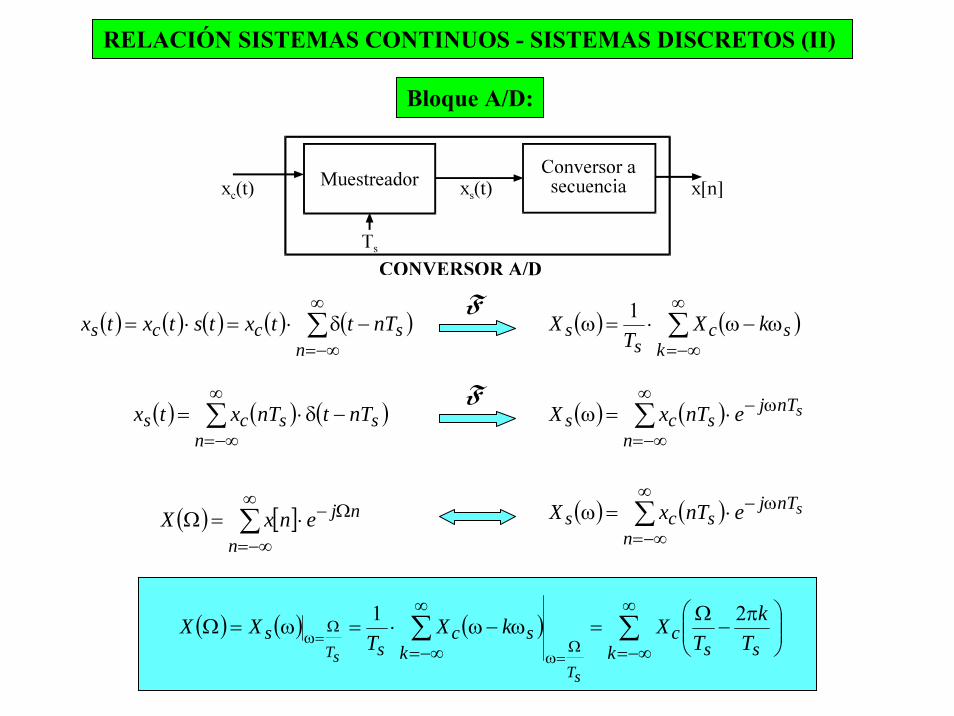
Bloque A/D:
F
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (II)
( ) ( ) ( ) ( ) ( )∑∞
−∞=−δ⋅=⋅=
nsccs nTttxtstxtx
F
( ) ( )∑∞
−∞=ω−ω⋅=ω
ksc
ss kX
TX 1
( ) ( ) ( )∑∞
−∞=−δ⋅=
nsscs nTtnTxtx ( ) ( )∑
∞
−∞=
ω−⋅=ωn
nTjscs senTxX
( ) [ ]∑∞
−∞=
Ω−⋅=Ωn
njenxX ( ) ( )∑∞
−∞=
ω−⋅=ωn
nTjscs senTxX
( ) ( ) ( ) ∑∑∞
−∞=
∞
−∞=⎟⎟⎠
⎞⎜⎜⎝
⎛ π−
Ω=ω−ω⋅=ω=Ω
Ω=ω
Ω=ω
k ssc
ksc
ss T
kT
XkXT
XX
sTsT
21

Bloque D/A:
[ ]∑∞
−∞=
Ω−⋅=Ωn
njenyY )(
[ ]∑∑∞
−∞=
ω−∞
−∞=
ω− ⋅=⋅=ωn
nTj
n
nTjsss ss enyenTyY )()(
sTs YY ω=ΩΩ=ω )()(
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (III)
( ) ( )sTrrsc YHHYY ω=ΩΩ⋅ω=ω⋅ω=ω )()()(

( ) ∑∞
−∞=⎟⎟⎠
⎞⎜⎜⎝
⎛ π−
Ω⋅⋅Ω=Ω⋅Ω=Ωk ss
cs T
kT
XT
HXHY 21)()()(
( )∑∞
−∞=ω−ω⋅⋅Ω=Ω=ω ω=Ωω=Ω
ksc
ss kX
THYY
sTsT1)()()(
RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (IV)
( ) ( ) ( ) ( ) ( )∑∞
−∞=ω−ω⋅⋅Ω⋅ω=ω⋅ω=ω ω=Ω
ksc
srsrc kX
THHYHY
sT1)(
( )( ) ( )
⎪⎪⎩
⎪⎪⎨
⎧
ω>ω
π>ω
ω<ω
π<ωΩ⋅ω
=ωω=Ω
2;0
2;
ss
ssTc
có
T
óT
HXY
s ( ) ( ) ( )ω⋅ω=ω ceffc XHY
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
ω>ω
π>ω
ω<ω
π<ωΩ
=ωω=Ω
2;0
2;
ss
ss
Teff
óT
óT
HH
s

RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (V)
Ejemplo: Obtener la plantilla de un filtro digital que se va a utilizar para realizar un filtrado paso bajo de una señal continua, utilizando la estructura de la figura anterior, conlas siguientes características:
El periodo de muestreo será Ts = 10-4 segundos.
( )
( ) s/rad;,H
s/rad;,H,
eff
eff
300020010
200020011990
⋅π≥ω<ω
⋅π≤ω≤<ω<

RELACIÓN SISTEMAS CONTINUOS - SISTEMAS DISCRETOS (VI)
( )( )
30002
2000260log20001,0
086,01log2001,0
⋅=
⋅=−=⋅⇒=
=+⋅⇒=
πω
πωδδ
δδ
a
p
aa
pp
dB
dB
.rad,T
.rad,T
saa
spp
π=⋅⋅π=⋅ω=Ω
π=⋅⋅π=⋅ω=Ω
−
−
601030002
4010200024
4
sT⋅=Ω ω

DISEÑO DE FILTROS DIGITALES IIR

DISEÑO DE FILTROS IIR A PARTIR DE FILTROS ANALÓGICOS
PROCESO:
ESPECIFICACIONES FILTRO DIGITAL↓
ESPECIFICACIONES FILTRO ANALÓGICO↓
FUNCIÓN DE TRANSFERENCIA ANALÓGICA H(s)↓
FUNCIÓN DE SISTEMA H(z)
-Aproximación por derivadas
-Respuesta al impulso invariante.
- Transformación bilineal.
s z
↔⎧⎪⎨⎪ω ↔ Ω⎩
SIMILITUDES CON LOS ANALÓGICOS ⇒ RELACIÓN

APROXIMACIÓN POR DERIVADAS (I)
∑ ∑= =
⋅β=⋅αN
k
M
kk
kkk
kk
dt)t(xd
dt)t(yd
0 0
Filtro Analógico:
( ) ( ) [ ] [ ]T
nynyT
TnTynTydt
)t(dy
nTt
1−−≡
−−=
=
Transformación:
( ) ( )
T
zs
sHzH⎟⎠⎞⎜
⎝⎛ −−
=
= 11
Restringido a filtros paso bajo y paso banda con frecuencias de corte bajas

APROXIMACIÓN POR DERIVADAS (II)
( ) 9101
2 ++=
,s)s(H
( ) ( )( )
( ) ( )2
21
2
2
2
2101,92,01
101,92,01
1,0121
01,92,01
91,01
1−−−
+++
++
+−
++=
+⎟⎟⎠
⎞⎜⎜⎝
⎛+−
=z
TTz
TTT
TTT
Tz
zH
Ejemplo:
0 1 2 3 4 5 6 7 8 9 1010
-3
10-2
10-1
100
101
ω/π (rad/s)
|H( ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro analógico
1/T11/T2
1/T3
1/T4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 110-3
10-2
10-1
100
Ω /π (rad)
|H( Ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro digital
T4
T1
T2
T3

RESPUESTA AL IMPULSO INVARIANTE (I)
CONCEPTO: Obtener la Respuesta Impulsiva del Filtro Discreto Muestreando la de un Filtro Continuo
[ ] ( )h n T h nTd c d= ck d d
2 kH( ) HT T
∞
=−∞
⎛ ⎞Ω π⇒ Ω = −⎜ ⎟
⎝ ⎠∑
Ω = ω Td
( ) ( )c cd d
H H SIEMPRE QUE H 0T T
⎛ ⎞Ω πΩ = ∀ Ω < π ω = ∀ ω ≥⎜ ⎟
⎝ ⎠( )H ω
ω
dTπ
dTπ
−( )H Ω
Ωπ−π 2π 3π 4π2− π3− π4− π

RESPUESTA AL IMPULSO INVARIANTE (I)
CONCEPTO: Obtener la Respuesta Impulsiva del Filtro Discreto Muestreando la de un Filtro Continuo
[ ] ( )h n T h nTd c d= ck d d
2 kH( ) HT T
∞
=−∞
⎛ ⎞Ω π⇒ Ω = −⎜ ⎟
⎝ ⎠∑
Ω = ω Td
( ) ( )c cd d
H H SIEMPRE QUE H 0T T
⎛ ⎞Ω πΩ = ∀ Ω < π ω = ∀ ω ≥⎜ ⎟
⎝ ⎠ ( )H ω
ω
dTπ
dTπ
−( )H Ω
Ωπ−π 2π 3π 4π2− π3− π4− π

( ) ∑= −
=N
1k k
kc ss
AsH
( )h tA e t
c
k s tk
Nk
=∀ ≥
∀
⎧
⎨⎪
⎩⎪
=∑
10
0
,
, t < 0
[ ] [ ]h n T A e u nd k s nTk
Nk d=
=∑
1
( ) ∑=
−−=
N
1k 1Tskd
ze1ATzH
dk
SUPONEMOS OBTENIDA:
OBTENCIÓN DE LA TRANSFORMADA INVERSA DE LAPLACE
MUESTREANDO hc (t) SE OBTIENE:
APLICANDO TRANSFORMADA Z:
RESPUESTA AL IMPULSO INVARIANTE (II)

RESPUESTA AL IMPULSO INVARIANTE (III)
( ) ( )k d
N Nd kk
c s T 1k 1 k 1k
T AAH s H zs s 1 e z−
= =
= → =− −∑ ∑
PLANO S PLANO Z
POLOS
COEFICIENTES
ESTABILIDAD
ks
kA kd AT
kd sTe
0Re <ks 1Re <kd sTe

RESPUESTA AL IMPULSO INVARIANTE (IV)
Ejemplo: Convertir el filtro analógico con función de transferencia:
( )( ) 91.0
12 ++
=s
sHc
en un filtro IIR digital aplicando la invarianza al impulso.
jsp 31.0 ±−= ( )js
j
js
jsHc 31.0
61
31.061
−+−
++=
( ) ( ) ( ) 131.0131.0 161
161
−+−−−− −−
−=
ze
jT
ze
jTzH
dd Tjd
Tjd
( )( )
( ) 220110
110
321
331
−−−−
−−
+⋅⋅−
⋅⋅=
zezTcose
zTseneTzH
dd
d
T.d
T.d
T.d

RESPUESTA AL IMPULSO INVARIANTE (V)
0 1 2 3 4 5 6 7 8 9 1010
-3
10-2
10-1
100
101
ω/π (rad/s)
|H( ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro analógico
1/T11/T2
1/T3
1/T4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 110-3
10-2
10-1
100
101
Ω /π
|H( Ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro digital
T4
T3
T2
T1

TRANSFORMACIÓN BILINEAL (I)
1
1d d
2 1 z 2 z 1sT 1 z T z 1
−
−
⎛ ⎞− −⎛ ⎞= =⎜ ⎟ ⎜ ⎟+ +⎝ ⎠⎝ ⎠
d
d
T1 s2zT1 s2
+=
−
SemiplanoIzquierdo Interior Circunferencia Unidad
SemiplanoDerecho
Exterior Circunferencia Unidad
Eje ImaginarioCircunferencia Unidad
( ) ( )⎩⎨⎧
⎯⎯⎯⎯⎯⎯ →⎯⎭⎬⎫
zzH
ssH iónTansformac
⎟⎟⎠
⎞⎜⎜⎝
⎛
Ω++
Ω+
Ω++
−⋅=
+
−⋅=ω+σ=
Ω
Ω
cosrrrsenj
cosrrr
Trere
Tjs
dj
j
d 212
2112
112
22
2

TRANSFORMACIÓN BILINEAL (II)
d
2 z 1sT z 1
−⎛ ⎞= ⎜ ⎟+⎝ ⎠
j
jd
2 e 1jT e 1
Ω
Ω
⎡ ⎤−ω = ⎢ ⎥+⎣ ⎦
d
2 tgT 2
Ωω=
dT2 arctg
2ω
Ω =
Relación Eje Imaginario Plano “s” ↔ Circunferencia Unidad Plano “z”
ω Ω

( )H e jΩ
( )Hc ω
TRANSFORMACIÓN BILINEAL (III)
Relación NO LINEAL ω↔ Ω

2παTd
παTd
− αTd
Ω
− ⎛⎝
⎞⎠
22
αTd
tg Ω
( )[ ]Arg H e jΩ
−2παTd
−παTd
TRANSFORMACIÓN BILINEAL (IV)
Relación NO LINEAL ω↔ Ω
( )s js je e ( FASE LINEAL)= ω−α −α ω⎯⎯⎯→ ⇒ ϕ ω = −αω
( )d
2j tgT 2
d
2e tg ( Fase NO LINEAL)T 2
Ω− α Ω
⇒ Φ Ω = −α

TRANSFORMACIÓN BILINEAL (V)
Ejemplo 1: Convertir el filtro analógico con función de transferencia:
( )( ) 910
12 ++
=.s
sHa
en un filtro IIR digital mediante la transformación bilineal.
( )
910112
12
1
1+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛
+
−⋅
=
−
−.
zz
T
zH
d
⎟⎟⎠
⎞⎜⎜⎝
⎛
+
−⋅=
−
−
1
1
112
zz
Ts
d

TRANSFORMACIÓN BILINEAL (VI)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 110-4
10-3
10-2
10-1
100
101
Ω /π (rad)
|H( Ω
)| (
dBs)
Módulo de la respuesta en frecuencia del filtro digital
T4 T3T2 T1
0 1 2 3 4 5 6 7 8 9 1010
-3
10-2
10-1
100
101
ω/π (rad/s)
|H( ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro analógico
1/T11/T2
1/T3
1/T4

TRANSFORMACIÓN BILINEAL (VII)
Ejemplo 1: Convertir el filtro analógico con función de transferencia:
( )( ) 161.0
1.02 ++
+=
sssHa
en un filtro IIR digital mediante la transformación bilineal. El filtro digital debe tener un polo a la frecuencia 2π=Ωr
441.0 =⇒±−= rp js ω
21
2224
22
=⇒=⇒Ω
= dd
id
i TtgT
tgT
πω
⎟⎟⎠
⎞⎜⎜⎝
⎛
+
−= −
−
1
1
114
zzs
( ) 214
213
2
1
1
1
1
952.010096.61119.010096.6125.0
161.0114
1.0114
−−−
−−−
−
−
−
−
++
−+=
+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛
+
−
+⎟⎟⎠
⎞⎜⎜⎝
⎛
+
−
=zz
zz
zz
zz
zH

TRANSFORMACIÓN BILINEAL (VIII)
0 1 2 3 4 5 6 7 8 9 1010-3
10-2
10-1
100
101
ω
|H( ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro analógico
0 0.5 1 1.5 2 2.5 3 3.510-3
10-2
10-1
100
101
Ω
|H( Ω
)| (d
Bs)
Módulo de la respuesta en frecuencia del filtro digital

EJEMPLO (I)
( )( )⎪⎩
⎪⎨⎧
≤Ω≤≤Ω
≤Ω≤≤Ω≤
ππ
π
3,0; 17783,0
2,00;189125,0
H
H
Diseñar un filtro digital paso bajo aplicando la respuesta al impulso invariante y la transformación bilineal a un filtro de Butterworth. Las especificaciones del filtro digital son:
( ) ( )( )
( )⎪⎩
⎪⎨
⎧
≤Ω≤≥Ω
≤Ω≤≤Ω≤
Ω⋅−=Ω
ππα
πα
α
3,0; 15
2,00;10
log20
dB
dB
H

EJEMPLO (II)
dTΩ
=ω
a) Respuesta al Impulso Invariante b) Transformación Bilineal
Obtención de la plantilla del filtro paso bajo prototipo analógico:
⎟⎠⎞
⎜⎝⎛Ω⋅=ω
22 tg
Td

EJEMPLO (III)
a) Respuesta al Impulso Invariante:
( ) N
c
aH 22
1
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
+
=ω
Diseño del Filtro de Butterworth
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛ωπ
+
⎟⎠⎞
⎜⎝⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛ωπ
+
22
22
1778301301
8912501201
,T,
,T,
N
cd
N
cd
⎪⎩
⎪⎨⎧
=
==
88,5
22433,070474,0
NTT dd
cπω
6=Ndd
c TTπω 2256,07087,0
==
Distribución de raíces:
d
d
d
Tjs
Tjs
Tjs
1834,06845.0
5011,05011.0
6845,01834.0
3
2
1
±−=
±−=
±−=

EJEMPLO (IV)
a) Respuesta al Impulso Invariante: Diseño del Filtro de Butterworth
( ) ( ) ( ) ( )5022,03690,15022,00022,15022,03668,0 222 ++⋅++⋅++=
ssssssksHa
( ) 1266010 ,kHa =⇒=
( )
1834,06845,06196,19351,0
1834,06845,06196,19351,0+
5011,05011,00797,1
5011,05011,00797,1+
6845,01834,02505,01447,0
6845,01834,02505,01447,0
jsj
jsj
jsjs
jsj
jsjsHa
−+−
+++
+
+−+
−+
++−
+−+
++
++−
=
( )1266,06905,08824,12533,37484,37380,2
1266,023456 ++++++
=ssssss
sHa

EJEMPLO (V)
a) Respuesta al Impulso Invariante: Obtención del Filtro Digital
( )H zT Ae zd ks T
k
N
k d=
− −=∑
1 11
( )
11
11
1834,06845,01834,06845,0
5011,05011,05011,05011,0
16845,01834,016845,01834,0
16196,19351,0
16196,19351,0+
10797,1
10797,1+
12505,01447,0
12505,01447,0
−−
−−
−−−
−−−
−−−−−
−
−+
−
+
+−
−+
−
−
+−
++
−
−=
zeej
zeej
eezee
zeej
zeejzH
jj
zjj
jj
( ) 654321
54321
0647056000072522190401835344331001000420016700105000070
−−−−−−
−−−−−
+−+−+−
++++=
z,z,z,z,z,z,z,z,z,z,z,zH

EJEMPLO (VI)
b) Transformación bilineal: Diseño del Filtro de Butterworth
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎟⎠⎞
⎜⎝⎛=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
ω
⎟⎠⎞
⎜⎝⎛ π
+
⎟⎠⎞
⎜⎝⎛=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
ω
⎟⎠⎞
⎜⎝⎛ π
+
2
2
22
17783012
302
1
89125012
202
1
,
,tgT
,
,tgT
N
cd
N
cd
⎪⎩
⎪⎨⎧
=
π==ω
6
2439076620
NT
,T,
ddc
Distribución de raíces:
d
d
d
Tjs
Tjs
Tjs
7401,01983.0
5418,05418.0
1983,07401.0
3
2
1
±−=
±−=
±−=
( ) N
c
aH 22
1
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ωω
+
=ω
( )2024,00205,15728,21124,43822,49605,2
2024,023456 ++++++
=ssssss
sHa
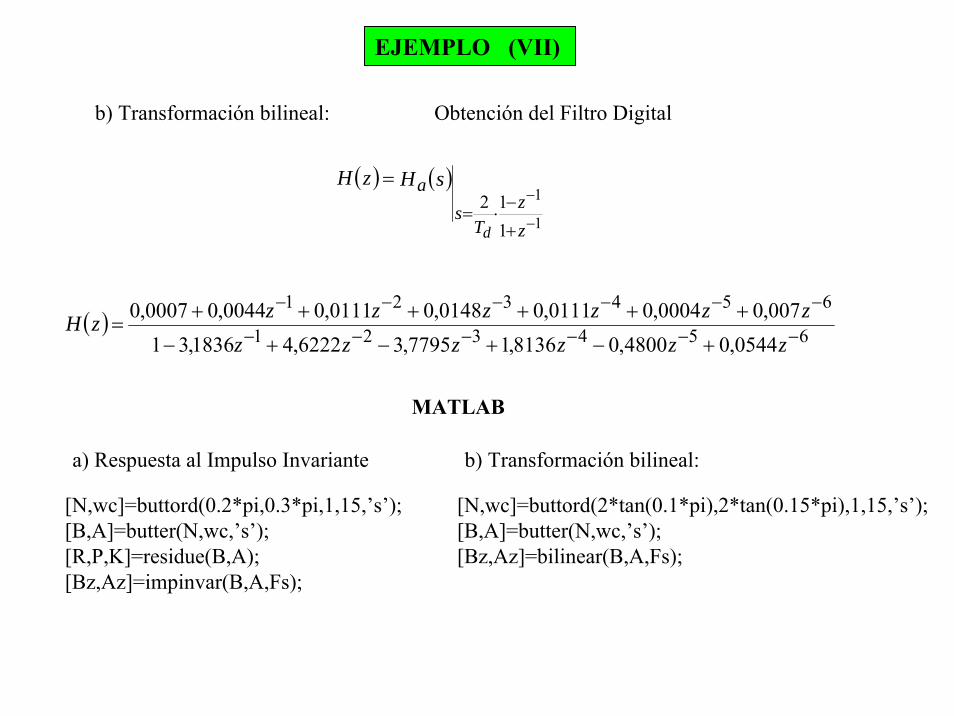
EJEMPLO (VII)
b) Transformación bilineal: Obtención del Filtro Digital
( ) ( )
1
1
112
−
−
+
−⋅=
=
zz
Ts
a
d
sHzH
( ) 654321
654321
0544,04800,08136,17795,36222,41836,31007,00004,00111,00148,00111,00044,00007,0−−−−−−
−−−−−−
+−+−+−
++++++=
zzzzzzzzzzzzzH
MATLAB
[N,wc]=buttord(0.2*pi,0.3*pi,1,15,’s’);[B,A]=butter(N,wc,’s’);[R,P,K]=residue(B,A);[Bz,Az]=impinvar(B,A,Fs);
a) Respuesta al Impulso Invariante
[N,wc]=buttord(2*tan(0.1*pi),2*tan(0.15*pi),1,15,’s’);[B,A]=butter(N,wc,’s’);[Bz,Az]=bilinear(B,A,Fs);
b) Transformación bilineal:

EJEMPLO (VIII)
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
Ω
|H( Ω
)|
Módulo de la respuesta en frecuencia del filtro digital
BilinealR.I.Inv.

EJEMPLO (IX)
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
ω
|H( ω
)|
Módulo de la respuesta en frecuencia del filtro analógico prototipo
Td=1
Td=4
Td=0,2*π
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
Ω
|H( Ω
)|
Módulo de la respuesta en frecuencia del filtro digital
Td=1
Td=4
Td=0,2*π
Respuesta al Impulso Invariante

TRANSFORMACIONES DE FILTROS DISCRETOS (I)
Procedimientos:1.- Transformación en frecuencias en tiempo continuo.2.- Transformación en frecuencias en tiempo discreto.

TRANSFORMACIONES DE FILTROS DISCRETOS (II)
Transformación en frecuencias en tiempo continuo.
1.- Transformación paso bajo a paso bajo:
( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ω
ω=→⇒
ω
ω→ sHs'HsHss
'p
pPBPBPB'p
p
2.- Transformación paso bajo a paso alto:
( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ω⋅ω=→⇒
ω⋅ω→
sHsHsH
ss
'ppPBPAPB
'pp
3.- Transformación paso bajo a paso banda:
( ) ( ) ( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ω−ω⋅
ω⋅ω+⋅ω=→⇒
ω−ω⋅
ω⋅ω+⋅ω→
−+
−+
−+
−+
pp
pppPBPBdPB
pp
ppp s
sHsHsH
ss
s22
eriorcortedePulsación
eriorcortedePulsación
p
p
inf
sup
≡ω
≡ω
−
+
( )( ) ( )
( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ω⋅ω+
ω−ω⋅⋅ω=→⇒
ω⋅ω+
ω−ω⋅⋅ω→
−+
−+
−+
−+
pp
pppPBBEPB
pp
ppp
s
sHsHsH
s
ss 22
4.- Transformación paso bajo a banda Eliminada:

TRANSFORMACIONES DE FILTROS DISCRETOS (III)
G(z-1) debe ser función racional en z-1.
El interior de la circunferencia unidad en el plano z se debe transformar en el interior del circunferencia unidad en el plano z´.
La circunferencia unidad en el plano z se debe transformar en lacircunferencia unidad en el plano z’.
Constantinides (1970):* 1N N
1k k* 1
k 1 k 1k k
z a z az ' z '1 a z 1 a z
−−
−= =
− −= ± ↔ = ±
− −∏ ∏
Transformación en frecuencias en tiempo discreto.
( ) ( ) ( ) ( )1111
−− =−− =⇒= zG'zPB 'zHzHzG'z

TRANSFORMACIONES DE FILTROS DISCRETOS (IV)
Ejemplo: Paso Bajo - Paso Bajo
( )
*j m
j m *
j m * j m
j m * j m
1 a1 e1 a
1 a e 1 a
1 a e a e1 e a a e
π
π
π π
π π
−=
−− = −
− = −
− = −
A’ ↔ A
( )
*j m
j m *
j m * j m
j m * j m
1 a1 e1 a
1 a e 1 a
1 a e a e1 e a a e
π
π
π π
π π
− −− =
++ = +
+ = +
− = − +
C’ ↔ C
m=0 ; a = α (Real) zz '1 z−α
=−α
B’ ↔ Bp
p
p
jj
j
ee1 e
Ωθ
Ω
− α=
−α
α
θ
θ=
−⎛
⎝⎜
⎞
⎠⎟
+⎛
⎝⎜
⎞
⎠⎟
sen
sen
Ω
Ω
p p
p p
2
2
Para determinar α :
z z aaz'
*= ± −
−1

TIPO FILTRO
TRANSFORMACIÓN FÓRMULAS ASOCIADAS
PASO BAJO
zz
z'−
−
−=−
−1
1
11α
α
α
θ
θ=
−⎛
⎝⎜
⎞
⎠⎟
+⎛
⎝⎜
⎞
⎠⎟
sen
sen
Ω
Ω
p p
p p
2
2
Ωp = frecuencia de corte desada
PASO ALTO
zz
z'−
−
−= −+
+1
1
11α
α α
θ
θ= −
+⎛
⎝⎜
⎞
⎠⎟
−⎛
⎝⎜
⎞
⎠⎟
cos
cos
p p
p p
Ω
Ω2
2
Ωp = frecuencia de corte desada
PASO BANDA
zz
kk
zkk
kk
zk
kz
'−− −
− −=
−+
+−+
−+
−+
+
1
2 1
2 1
21
11
11
21
1
α
α
α =
+⎛
⎝⎜
⎞
⎠⎟
−⎛
⎝⎜
⎞
⎠⎟
cos
cos
Ω Ω
Ω Ω
p p
p p
2 1
2 1
2
2
k g p p p=
−⎛
⎝⎜
⎞
⎠⎟
⎛
⎝⎜
⎞
⎠⎟cot tg
Ω Ω2 1
2 2θ
Ω
Ωp
p
1
2
=
=
frecuencia de corte inferior desada
frecuencia de corte superor desada
BANDA ELIMINADA
zz
kk
zkk
kk
zkk
z'−
− −
− −=
−+
+−+
−+
−+
+
1
2 1
2 1
21
11
11
21
1
α
α
α =
+⎛
⎝⎜
⎞
⎠⎟
−⎛
⎝⎜
⎞
⎠⎟
cos
cos
Ω Ω
Ω Ω
p p
p p
2 1
2 1
2
2
k p p p=
−⎛
⎝⎜
⎞
⎠⎟
⎛
⎝⎜
⎞
⎠⎟tg tg
Ω Ω2 1
2 2θ
Ω
Ωp
p
1
2
=
=
frecuencia de corte inferior desada
frecuencia de corte superor desada
TRANSFORMACIONES DE FILTROS DISCRETOS (V)

DISEÑO DE FILTROS DIGITALES FIR

SISTEMAS FIR DE FASE LINEAL (I)
( )( ) ( )
( ) ( ) ( )⎪⎩
⎪⎨⎧
⋅Ω=Ω−
⋅Ω=Ω−⇒Ω
Ωα−β
Ωα−
j
j
eAHdageneralizalinealFase
eHHlinealFaseH
Función real de Ω Constantes reales
[ ] ( ) ( ) ( ) [ ]α−=Ω⋅Ωπ
=Ω⋅Ωπ
= β
π
α−Ωβ
π
Ω ∫∫ naedeAedeHnh jnjj
nj
22 221
[ ] [ ]αβ −= naenh j
[ ] [ ]nana −= ∗ [ ] [ ]αβ +=⇒ − nhena j
[ ] [ ]αα ββ +−=+ ∗− nhenhe jj [ ] [ ]α+−= ∗β 22 nhenh j
[ ][ ] 200
MMn;nh
causalesnhSi =α⇒
⎩⎨⎧
≤≤≠ [ ] [ ]nMhenh j −= ∗β2

SISTEMAS FIR DE FASE LINEAL (II)
[ ] [ ]nMhenh j −= ∗β2
Coeficientes del filtro reales [ ] [ ]nhnh ∗=⇒ ale j Re2β⇒ Zkk ∈=⇒ ,2/πβ
[ ] ( ) [ ] ZknMhnh k ∈−⋅−= ,.1
( ) ( ) ( ))(,,22 filtrodelordenMZkeAH
Mkj∈⋅Ω=Ω
Ω−π
Tipo I: k = 0 (simetría positiva) y M par Tipo II: k = 0 (simetría positiva) y M impar [ ] [ ]nMhnh −=
[ ] [ ]nMhnh −−=Tipo III: k = 1 (simetría negativa) y M par Tipo IV: k = 1 (simetría negativa) y M impar
⎩⎨⎧
⎩⎨⎧

SISTEMAS FIR DE FASE LINEAL (III)Ejemplo: Obtener la respuesta en frecuencia de un sistema FIR de orden par cuya respuesta alImpulso tiene simetría positiva y demostrar que es de fase lineal.
[ ] [ ]
[ ] [ ][ ] [ ]
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎦⎤
⎢⎣⎡ +=⎥⎦
⎤⎢⎣⎡ −
−==
⇒⎭⎬⎫
≡−=
12
12
110
MhMh
...MhhMhh
ParMnMhnh
( ) [ ] [ ] [ ] [ ] ( ) [ ] Ω−Ω−−Ω−Ω−
=
Ω− ⋅+⋅−++⋅⎥⎦⎤
⎢⎣⎡++⋅+=⋅=Ω ∑ jMMj
MjjM
n
nj eMheMh...eMh...ehhenhH 12
01
210
( ) [ ] [ ] [ ] [ ]⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅+⋅−++⎥⎦
⎤⎢⎣⎡++⋅+⋅⋅=Ω
Ω⎟⎠⎞
⎜⎝⎛−Ω⎟
⎠⎞
⎜⎝⎛ −−Ω⎟
⎠⎞
⎜⎝⎛ −ΩΩ− 2
12
1222 1
210
MjMjMjMjMjeMheMh...Mh...eheheH
( ) [ ] [ ]⎭⎬⎫
⎩⎨⎧
⎥⎦⎤
⎢⎣⎡++⎟
⎠⎞
⎜⎝⎛ Ω⎟
⎠⎞
⎜⎝⎛ −⋅+⎟
⎠⎞
⎜⎝⎛ Ω⋅⋅=Ω
Ω−
21
212
2022 Mh...McoshMcosheH
Mj
( ) [ ] ( ) ( )ΩθΩ−
=⋅Ω=⋅
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎦⎤
⎢⎣⎡
⎟⎠⎞
⎜⎝⎛ −Ω⋅+⎥⎦
⎤⎢⎣⎡=Ω ∑
−
jMj
neAenMcosnhMhH
M
2
0
12
22
2
( ) [ ] ( ) Ω−=Ωθ⎥⎦⎤
⎢⎣⎡
⎟⎠⎞
⎜⎝⎛ −Ω⋅+⎥⎦
⎤⎢⎣⎡=Ω ∑
−
= 2;
2cos2
2
12
0
MnMnhMhA
M
n

( )( ) [ ] ( )[ ]
[ ] [ ]nh2nd
nsenndeH
21M
1n21j 2
1M
22M
−=
−⋅Ω⋅⋅=Ω
+=
−Ω−∑+
π
( )( ) [ ] [ ]
[ ] [ ]nh2nc
nsennceH
2M
1n
j 2M
22M
−=
⋅Ω⋅⋅=Ω ∑=
−Ω− π
( ) [ ] ( )[ ][ ] [ ]nh2nb
ncosnbeH
21M
1n21j 2
1M
2M
−=
−⋅Ω⋅⋅=Ω
+=
Ω−∑+
( ) [ ] [ ]
[ ] [ ] [ ] [ ]nhnaha
nnaeH
MMn
jM
M
−==
⋅Ω⋅⋅=Ω ∑=
Ω−
22
0
20
cos2
2
SISTEMAS FIR DE FASE LINEAL (IV)
Tipo h[n] Orden M H(Ω) θ(Ω) τ
I Par
II Impar
III Par
IV Impar
SimetríaNegativa
SimetríaPositiva
[ ] [ ]nMhnh −=
[ ] [ ]nMhnh −−=
2MΩ−
2MΩ−
22π+Ω− M
22π+Ω− M
2M
2M
2M
2M

SISTEMAS FIR DE FASE LINEAL (V)
Posiciones de los ceros en los sistemas FIR de fase lineal:
( ) ( )1−− ⋅±= zHzzH M
( ) ( ) ( ) ( )zHdecerozzHzHzzHerz Mj 11
11
111111 001 −−−−Ω ⇒=⇒=⋅±=⇒=
Si h[n] real:
( ) ( )1−− ⋅= zHzzH M
1=z ( ) ( ) ( ) ( )1111 HHH M ==⇒
Sistemas con simetría positiva y M impar (tipo II) poseen un cero en z = -1
( ) )()(1
11 zHdeceroTambiénzzHdecerotambiénz−∗∗ ⇒
Casos particulares (z = 1; z = -1):
( ) ( ) ( ) ( ) ( )( ) ( ) ( )⎩
⎨⎧
=−⇒−−=−⇒−=−⇒
⇒−−=−⇒0111
11111
HHHimparMHHparM
HH M1−=z
- Ceros de H(z):
( ) [ ] [ ] [ ] ( )∑∑∑=
−−−
=
−
=
− ⋅±⋅=⋅−±=⋅=0
1
00 Mk
kMM
n
nM
n
n zkhzznMhznhzH
Simetría Positiva:

SISTEMAS FIR DE FASE LINEAL (VI)
Posiciones de los ceros en los sistemas FIR de fase lineal:
( ) ( )1−− ⋅±= zHzzH M
( ) ( ) ( ) ( )zHdecerozzHzHzzHerz Mj 11
11
111111 001 −−−−Ω ⇒=⇒=⋅±=⇒=
Si h[n] real:
( ) )()(1
11 zHdeceroTambiénzzHdecerotambiénz−∗∗ ⇒
Casos particulares (z = 1; z = -1):
- Ceros de H(z):
( ) [ ] [ ] [ ] ( )∑∑∑=
−−−
=
−
=
− ⋅±⋅=⋅−±=⋅=0
1
00 Mk
kMM
n
nM
n
n zkhzznMhznhzH
1=z ( ) ( ) ( ) ( )1111 HHH M −=−=⇒ Sistemas tipo III y IV poseen un cero en z = 1
1−=z ( ) ( ) ( ) ( ) ( ) ( )( ) ( )⎩
⎨⎧
−=−⇒=−⇒−−=−⇒
⇒−−−=−⇒11
0111111
HHimparMHHHparM
HH M
Sistemas tipo III poseen un cero en z =- 1
Simetría Negativa: ( ) ( )1−− ⋅−= zHzzH M

SISTEMAS FIR DE FASE LINEAL (VII)
DIAGRAMAS DE POLOS Y CEROS DE SISTEMAS FIR DE FASE LINEAL
Orden par Orden parOrden impar
Orden impar Orden par Orden impar

DISEÑO DE FILTROS FIR
FILTROS IDEALES:
1.- Su hd[n] tiene longitud infinita.
2.- Su hd[n] es no causal ( hd[n] ≠ 0, ∀ n < 0 ).
SOLUCIÓN (MÉTODO DE LAS VENTANAS):
1.- Limitar la longitud de hd[n] a M+1 muestras(Multiplicarla por una función ventana h[n] = hd[n]·w[n] ).
2.- Introducir el retardo necesario para que h[n] sea causal.

DISEÑO DE FILTROS FIR
FILTRO DISCRETO PASO BAJO IDEAL
−ΩC ΩCΩπ−π
|H ( )|d Ω
[ ] ( ) ( )n
nCsendedeHnh
C
C
njnjdd π
ΩΩ
π=Ω⋅Ω
π= =∫
Ω
Ω−
Ω
π
Ω∫ 21
21
2
( ) [ ]∑∞
−∞=
Ω−⋅=Ωn
njdd enhH
Filtro ideal: Respuesta al impulso no causal e infinita.
-30 -20 -10 0 10 20 30
-0.2
0
0.2
0.4
0.6
0.8
1
n
h d[n]
Respuesta al impulso de un filtro discreto Paso Bajo Ideal
......
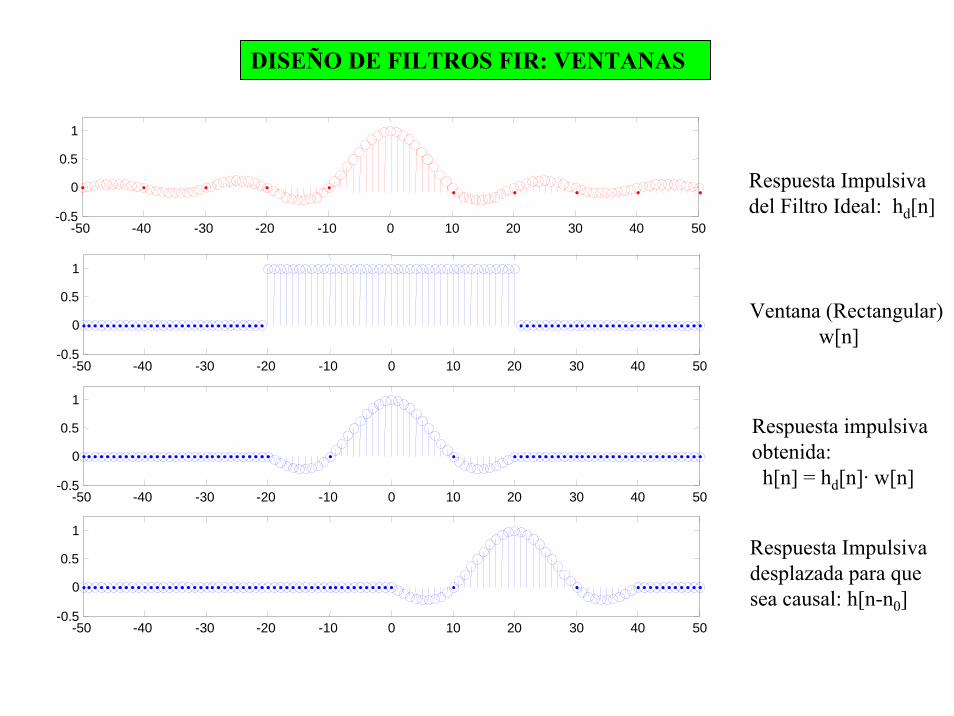
Respuesta Impulsivadel Filtro Ideal: hd[n]
Ventana (Rectangular)w[n]
Respuesta impulsivaobtenida:
h[n] = hd[n]· w[n]
Respuesta Impulsivadesplazada para quesea causal: h[n-n0]
DISEÑO DE FILTROS FIR: VENTANAS
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1

SI PRIMERO DESPLAZAMOS Y DESPUÉS MULTIPLICAMOS,EL RESULTADO ES EL MISMO ( VENTANAS CAUSALES).
Respuesta Impulsivadel Filtro Ideal: hd[n]
Respuesta Impulsiva delFiltro Ideal desplazada
hd[n-n0]
Ventana (Rectangular)causal: w[n]
Respuesta impulsivaobtenida:h[n] = hd[n-n0]· w[n]
DISEÑO DE FILTROS FIR: VENTANAS
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1
-50 -40 -30 -20 -10 0 10 20 30 40 50-0.5
0
0.5
1

Transformada de Fourier de la ventana rectangular:
DISEÑO DE FILTROS FIR: VENTANAS
( ) ( ) ( ) Ω−Ωφ− ⋅⎟⎠⎞
⎜⎝⎛Ω
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ +⋅Ω
=⋅Ω=Ω 2
2
21
Mjjp e
sen
MseneWW[ ]
⎩⎨⎧ ≤≤
=restoel
Mnnw
001
-3 -2 -1 0 1 2 3-20
-15
-10
-5
0
5
10
15
20
Ω
φΩ)
-3 -2 -1 0 1 2 3-4
-2
0
2
4
6
8
10
12
Ω
A(Ω
)0 M...
0
0.2
0.4
0.6
0.8
1
n
w[n
]
...

DISEÑO DE FILTROS FIR: VENTANAS
RESPUESTA DE FASE LINEAL
Todas las ventanas van a tener simetría positiva:
[ ] [ ] ( ) ( )
Las Respuestas al Impulso de los Filtros Ideales Tendrán Simetría Positiva o Negativa:
20
0Mj
pTF eWW
nderesto,Mn,nMw
nwΩ−
⋅Ω=Ω⎯⎯→←⎩⎨⎧ ≤≤−
=
[ ] [ ] ( ) ( )
[ ] [ ] ( ) ( ) 2
2
Mjnd
TFdd
Mjpd
TFdd
ejAHnMhnh
eAHnMhnh
Ω−
Ω−
⋅Ω=Ω⎯⎯→←−−=
⋅Ω=Ω⎯⎯→←−=
[ ] [ ] [ ] ( ) ( ) ( ) ( ) ( ) θ⋅θ−Ω⋅θπ
=Ω⊗Ω=Ω⎯⎯→←⋅= ∫π
dWHWHHnwnhnh ddTF
d2
21
( ) ( ) ( )( )
∫π
π−
θ−Ω−θ−θ⋅⋅θ−Ω⋅⋅θ
π=Ω deWeAH
Mjp
Mjp 22
21
( ) ( ) ( )∫π
π−
Ω−θ⋅θ−Ω⋅θ
π⋅=Ω dWAeH pp
Mj
212
Simetría positiva

EFECTO DEL ENVENTANADO SOBRE LA RESPUESTADE AMPLITUD DEL FILTRO.
DISEÑO DE FILTROS FIR: VENTANAS
-3 -2 -1 0 1 2 3
-0.2
0
0.2
0.4
0.6
0.8
1
Ω
Wp(Ω
)
( ) ( ) ( ) ( )Ω⋅=θ⋅θ−Ω⋅θπ
⋅=ΩΩ−π
π−
Ω−∫ AedWAeH
Mjpp
Mj22
21

2π-2π Ω = -Ω1Ω = -Ω2 Ω = Ω2Ω = Ω1
-Ω1 -Ω2 Ω2 Ω1
πΩ = π
π-π
Ω = -π-π Ω
ΔΩ = Ω2 - Ω1 = ZONA DE TRANSICIÓN
Debida Fundamentalmente a la Anchura del Lóbulo Principal
EFECTO DEL ENVENTANADO SOBRE LA RESPUESTADE AMPLITUD DEL FILTRO. LÓBULO PRINCIPAL
DISEÑO DE FILTROS FIR: VENTANAS

2π-2π
Ω = -Ω1Ω = -Ω2 Ω = Ω2Ω = Ω1Ω = -π
-π Ω
-π π
Ω = π
RIZADO EN BANDA DE PASO Y ELIMINADADebida a los Lóbulos Secundarios (Principalmente al primero)
-Ω1
-Ω2 Ω2Ω1
π
EFECTO DEL ENVENTANADO SOBRE LA
RESPUESTADE AMPLITUD DEL FILTRO.
LÓBULOS SECUNDARIOS
DISEÑO DE FILTROS FIR: VENTANAS

VENTANA RECTANGULAR.
4ANCHURA DEL LÓBULO PRINCIPAL =M 1π
ΔΩ =+
-2 0 20
2
4
6
8
M+1 = 9
Ω-2 0 2
0
2
4
6
8
10
12
M+1 = 13
Ω
-2 0 20
5
10
15
M+1 = 18
Ω-2 0 2
0
5
10
15
20
25
M+1 = 26
Ω
MÓDULO DE LA TRANSFORMADA DE FOURIER DE LA VENTANA RECTANGULAR
DISEÑO DE FILTROS FIR: VENTANAS
( )⎟⎠⎞
⎜⎝⎛ Ω
⎟⎠⎞
⎜⎝⎛ +
⋅Ω=Ω
2
21
sen
MsenW

DISEÑO DE FILTROS FIR: VENTANAS
VENTANA RECTANGULAR.
AMPLITUD RELATIVA DEL LÓBULO SECUNDARIO = -13 dB
0 1 2 3-60
-50
-40
-30
-20
-10
0M+1 = 9
Ω0 1 2 3
-60
-50
-40
-30
-20
-10
0
Ω
M+1 = 13
0 1 2 3-60
-50
-40
-30
-20
-10
0M+1 = 18
Ω0 1 2 3
-60
-50
-40
-30
-20
-10
0M+1 = 26
Ω
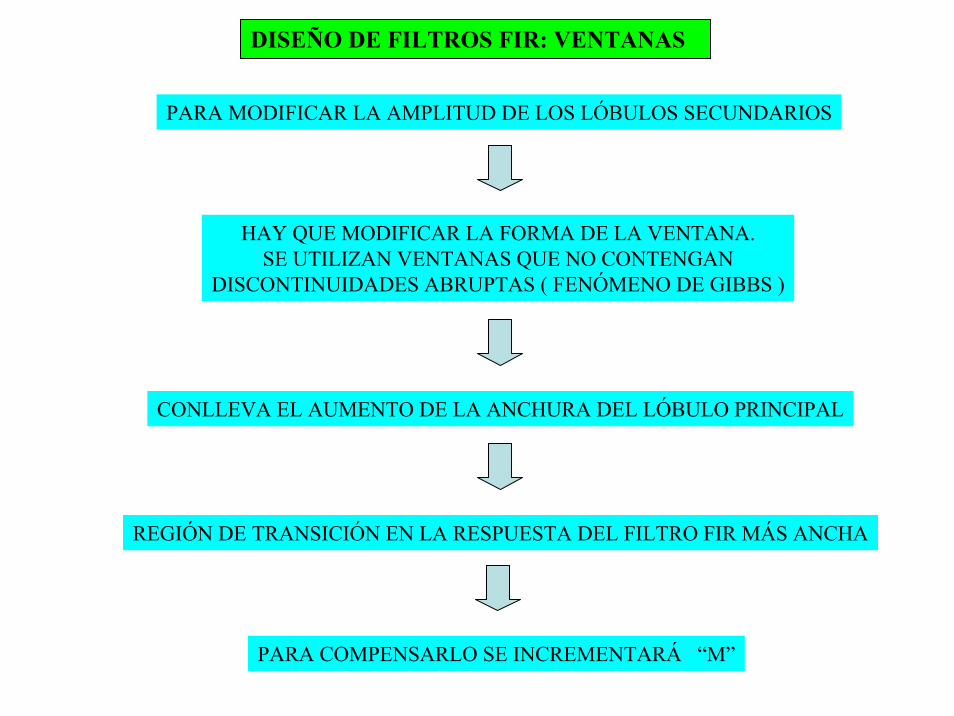
PARA MODIFICAR LA AMPLITUD DE LOS LÓBULOS SECUNDARIOS
HAY QUE MODIFICAR LA FORMA DE LA VENTANA.SE UTILIZAN VENTANAS QUE NO CONTENGAN
DISCONTINUIDADES ABRUPTAS ( FENÓMENO DE GIBBS )
DISEÑO DE FILTROS FIR: VENTANAS
CONLLEVA EL AUMENTO DE LA ANCHURA DEL LÓBULO PRINCIPAL
REGIÓN DE TRANSICIÓN EN LA RESPUESTA DEL FILTRO FIR MÁS ANCHA
PARA COMPENSARLO SE INCREMENTARÁ “M”

DISEÑO DE FILTROS FIR: VENTANAS
ALGUNAS VENTANAS UTILIZADAS: EXPRESIÓN ANALÍTICA
[ ]
2n M, 0 nM 2
2n M2 , n Mw nM 2
0, Resto n
⎧ ∀ ≤ ≤⎪⎪⎪ − ∀ ≤ ≤= ⎨⎪⎪⎪⎩
BARTLETT
[ ]
2 n0,5 0,5 cos , 0 n MM
w n0, Resto n
⎧ π⎛ ⎞− ∀ ≤ ≤⎜ ⎟⎪ ⎝ ⎠⎪⎪= ⎨⎪⎪⎪⎩
HANNING
HAMMING BLACKMAN
[ ]
2 n0,54 0, 46 cos , 0 n MM
w n0, Resto n
⎧ π⎛ ⎞− ∀ ≤ ≤⎜ ⎟⎪ ⎝ ⎠⎪⎪= ⎨⎪⎪⎪⎩
[ ]
2 n 4 n0, 42 0,5 cos 0,08 cos 0 n MM M
w n0, Resto n
⎧ π π⎛ ⎞ ⎛ ⎞− + ≤ ≤⎜ ⎟ ⎜ ⎟⎪ ⎝ ⎠ ⎝ ⎠⎪⎪= ⎨⎪⎪⎪⎩

DISEÑO DE FILTROS FIR: VENTANAS
ALGUNAS VENTANAS UTILIZADAS: REPRESENTACIÓN ( M = 50 )
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1BLACKMAN
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1BARTLETT
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1HANNING
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1HAMMING

DISEÑO DE FILTROS FIR: VENTANAS
0 1 2 3-100
-80
-60
-40
-20
0BLACKMAN
0 1 2 3-100
-80
-60
-40
-20
0HAMMING
0 1 2 3-100
-80
-60
-40
-20
0HANNING
0 1 2 3-100
-80
-60
-40
-20
0BARLETT M = 50
ALGUNAS VENTANAS UTILIZADAS: .( ) ( )( )20log W / max W− Ω Ω
DISEÑO DE FILTROS FIR: VENTANAS
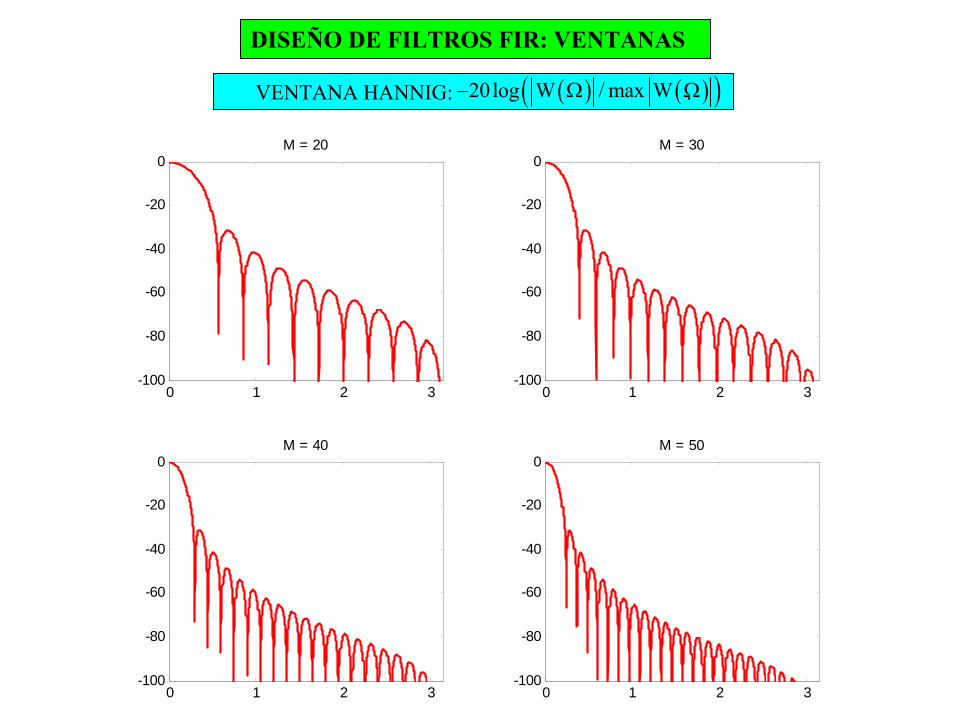
VENTANA HANNIG: .( ) ( )( )20log W / max W− Ω Ω
0 1 2 3-100
-80
-60
-40
-20
0M = 20
0 1 2 3-100
-80
-60
-40
-20
0M = 30
0 1 2 3-100
-80
-60
-40
-20
0M = 40
0 1 2 3-100
-80
-60
-40
-20
0M = 50

DISEÑO DE FILTROS FIR: VENTANAS
VENTANAS: RESUMEN DE CARACTERÍSTICAS
PARÁMETRO ÚNICO DE DISEÑO: ORDEN DEL FILTRO ( M )
⎟⎠⎞
⎜⎝⎛ π−
Mn2cos1
21
⎟⎠⎞
⎜⎝⎛ π
⋅−M
n2cos46.054.0
⎟⎠⎞
⎜⎝⎛ π
⋅+⎟⎠⎞
⎜⎝⎛ π
⋅−M
ncos.M
ncos.. 4080250420
VENTANA w[n] (0 ≤ n ≤ M) Anchura del Lóbulo Principal
Ai αbe rbp ΔΩ
Rectangular 1 4π/(M+1) 13,3 20,9 1,57
0,11
0,033
0,00298
1,84π/M
Hanning 8π/(M+1) 31,5 43,9 6,22π/M
Hamming 8π/(M+1) 42,7 54,5 6,64π/M
Blackman 12π/(M+1) 58,1 75,3 11,12π/M
Ai : Amplitud máxima relativa (en dB's) de los lóbulos laterales. αbe=-20 log(δ) : Atenuación mínima (en dB's) en la banda eliminada.rbp =-20 log((1- δ)/(1+ δ)): Rizado en la banda de paso.ΔΩ: anchura de la banda de transición.

DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER
[ ]( )
w nI n
In M
=−
−⎡⎣⎢
⎤⎦⎥
⎛
⎝⎜⎜
⎞
⎠⎟⎟
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
∀ ≤ ≤
∀
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
0
2
0
1
0
0
12
βα
α
β
, resto de n
M2
α =
I0 ( ): Función de Bessel de Orden CeroModificada de Primera Clase
β : Factor de Forma
( )( )
2kL
0k 1
x2I (x) 1 L 25
k!=
⎡ ⎤⎢ ⎥≈ + ≤⎢ ⎥⎢ ⎥⎣ ⎦
∑
DOS PARÁMETROS DE DISEÑO:
ORDEN DEL FILTRO ( M ) → AJUSTE DE ANCHURA DEL LÓBULO PRINCIPAL
FACTOR DE FORMA ( β ) → AJUSTE DE AMPLITUD DE LÓBULOS SECUNDARIOS

DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER: REPRESENTACIÓN PARA DISTINTOS VALORES DE β
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
β = 0
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1 β = 3
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1 β = 6
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1 β = 9
n n
n n

DISEÑO DE FILTROS FIR: VENTANAS
0 0.5 1 1.5 2 2.5 3-120
-100
-80
-60
-40
-20
0
M = 10
Ω 0 0.5 1 1.5 2 2.5 3
-120
-100
-80
-60
-40
-20
0
M = 10
Ω
M = 20
0 0.5 1 1.5 2 2.5 3-120
-100
-80
-60
-40
-20
0
M = 10
Ω
M = 20
M = 41
VENTANA DE KAISER: PARA DISTINTOS VALORES DE M( ) ( )( )20log W / max W− Ω Ω

DISEÑO DE FILTROS FIR: VENTANAS
0 0.5 1 1.5-80
-70
-60
-50
-40
-30
-20
-10
0
β = 0
Ω 0 0.5 1 1.5
-80
-70
-60
-50
-40
-30
-20
-10
0
β = 0
Ω
β = 3
0 0.5 1 1.5-80
-70
-60
-50
-40
-30
-20
-10
0
β = 0
Ω
β = 3
β = 6
0 0.5 1 1.5-80
-70
-60
-50
-40
-30
-20
-10
0
β = 0
Ω
β = 3
β = 6 β = 9
VENTANA DE KAISER: PARA DISTINTOS VALORES DE β( ) ( )( )20log W / max W− Ω Ω
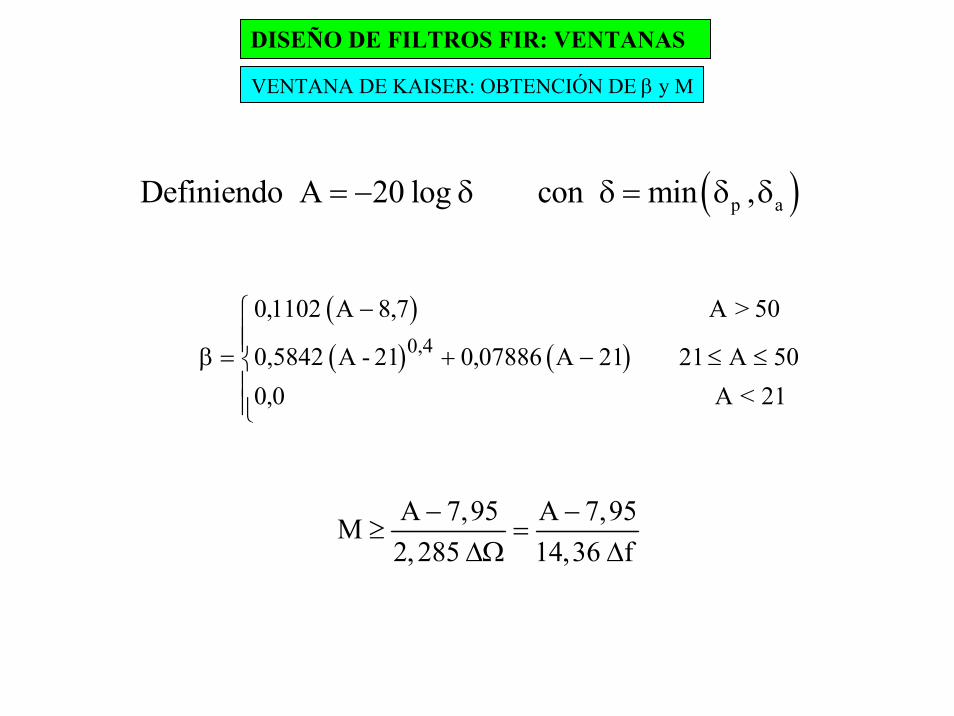
( )p aDefiniendo A 20 log con min ,= − δ δ = δ δ
( )( ) ( )β =
−
+ − ≤ ≤
⎧
⎨⎪⎪
⎩⎪⎪
0 1102 8 7
0 07886 21 21 500 0
0 4
, ,
,,
,
A
A A
A > 50
0,5842 A - 21 A < 21
DISEÑO DE FILTROS FIR: VENTANAS
VENTANA DE KAISER: OBTENCIÓN DE β y M
A 7,95 A 7,95M2,285 14,36 f
− −≥ =
ΔΩ Δ

DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
Se desea diseñar un sistema para procesar una señal analógica xc(t) (limitada en banda a 5 kHz) con un filtro digital como se indica en la figura.
Las especificaciones del módulo de la respuesta en frecuencia del sistema analógico |H(ω)| son:
-Atenuación máxima en la banda de paso αp= 1 dBs.- Atenuación mínima en la banda atenuada αa = 15 dBs.- Frecuencia de corte en la banda de paso: fp = 800 Hz- frecuencia de corte en la banda atenuada: fa = 1400 Hz

DISEÑO DE FILTROS FIR: CAMBIO DE ESPECIFICACIONES
αmax
αmin
α(dB)
ΩΩp Ωa π
1 - δ1
|H(Ω)|
ΩΩp Ωa
1
δ2
π
max
min
201
202
1 10
10
α−
α−
− δ =
δ =
1 - δp
|H(Ω)|
ΩΩp Ωa
1
δa
π
1+ δp
( ) ( ) ( ) ( )max20
p 1 p p p1 1 1 1 1 10α
−− δ = − δ + δ ⇒ − δ = + δ
( )max
min
max
2020
p a p20
10 1 ; 10 110 1
αα
−
α
−δ = δ = + δ
+
( ) ( )min20
a p 2 p1 10 1α
−δ = + δ δ = + δ
max maxmax max
max max
20 2020 20
p p20 20
1 10 10 110 1 1 101 10 10 1
α α−α α
− −
α α−
⎛ ⎞ − −δ + = − ⇒ δ = =⎜ ⎟⎜ ⎟⎝ ⎠ + +

|H(Ω)|
Ωπ
1
1-δ1
δ2
1-δp
1+δp
δa
DISEÑO DE FILTROS FIR: CAMBIO DE ESPECIFICACIONES

DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLO
⎪⎪⎩
⎪⎪⎨
⎧
=⋅⋅=⋅=Ω
=⋅⋅=⋅=Ω⇒=⇒⋅=Ω
−
−
ππω
ππωω
35,0108114002
2,010818002
81
3
3
saa
sppss
T
TmsTT
a) Plantilla de atenuación del Filtro Analógico: b) Plantilla de atenuación del Filtro Discreto:
d) Plantilla de amplitud del Filtro discreto en unidades naturales:
SOLUCIÓN:1. PLANTILLAS:
( ) 188,0110
0575,0
110
110
110
110
20
201
201
20
20
=+⋅=
=
+
−=
+
−=
−p
p
a
p
p
a δδ
δ
α
α
α

DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLOSOLUCIÓN:2. Diseño:
( ) ( ) dB,log',,min apap 8242005750 =δ⋅−=α⇒=δ=δδ=δParámetros de diseño:
VENTANA αbe
Rectangular 20,9
Hanning 43,9
Hamming 54,5
Blackman 75,3
π=π−π=Ω−Ω=ΔΩ 15020350 ,,,pa
424641150226
=⇒=ππ
> M,,,M
452744150646
=⇒=ππ
> M,,,M
7513741501211
=⇒=ππ
> M,,,M
1665151502852957824
2852957
=⇒=π⋅
−=
ΔΩ⋅−
> M,,,,,
,,AM
Ventana de Kaiser:
( ) ( ) 2961210788602158420 40 ,A,A, , =−⋅+−⋅=β
π=π+π
=Ω+Ω
=Ω 27502
350202
,,,apc
DISEÑO DE FILTROS FIR: VENTANAS
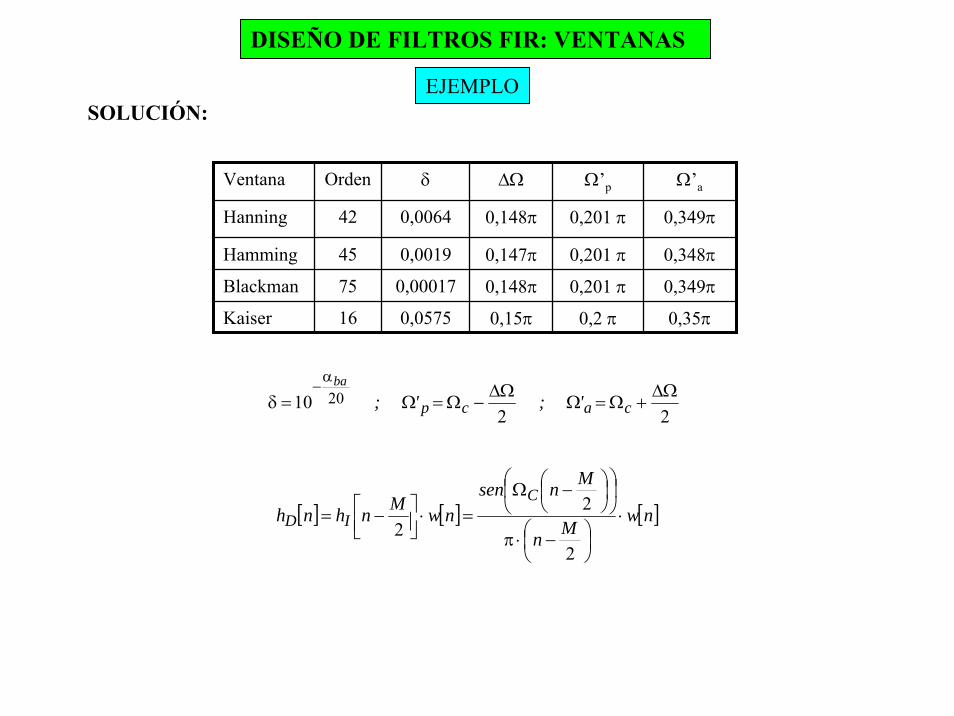
EJEMPLOSOLUCIÓN:
2210 20 ΔΩ
+Ω=ΩΔΩ
−Ω=Ω=δα
−cacp ';';
ba
Ventana Orden δ ΔΩ Ω’p Ω’a
Hanning 42 0,0064 0,148π 0,201 π 0,349π
0,348π
0,349π
Kaiser 16 0,0575 0,15π 0,2 π 0,35π
Hamming 45 0,0019 0,147π 0,201 π
Blackman 75 0,00017 0,148π 0,201 π
[ ] [ ] [ ]nwMn
MnsennwMnhnh
CID ⋅
⎟⎠⎞
⎜⎝⎛ −⋅π
⎟⎠
⎞⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −Ω
=⋅⎥⎦⎤
⎢⎣⎡ −=
2
22

DISEÑO DE FILTROS FIR: VENTANAS
EJEMPLOSOLUCIÓN:
[ ]( )( )
( )⎪⎩
⎪⎨
⎧≤≤⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ π
−⋅⋅−⋅π
−π=
nderesto;
n;ncosn
n,sennhD
0
42042
2121
21212750
[ ]( )( )
( )⎪⎩
⎪⎨
⎧≤≤⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ π
⋅−⋅−⋅π
−π=
nderesto;
n;ncos,,,n
,n,sennhD
0
45045
2460540522
5222750
[ ]( )( )
( )⎪⎩
⎪⎨
⎧≤≤⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ π
⋅−⎟⎠⎞
⎜⎝⎛ π
⋅−⋅−⋅π
−π=
nderesto;
n;ncos,ncos,,,n
,n,sennhD
0
75075
408075
250420537
5372750
- Hanning: FIR fase lineal tipo I
- Hamming: FIR fase lineal tipo II
- Blackman: FIR fase lineal tipo II
- Kaiser: FIR fase lineal tipo I
[ ] ( )( )( ) ( )
⎪⎪⎩
⎪⎪⎨
⎧
≤≤⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛⎥⎦⎤
⎢⎣⎡ −
−⋅⋅
−⋅π−π
=
nderesto;
n;,I
n,I
nn,sennhD
0
1602961
8812961
882750
0
0

DISEÑO DE FILTROS FIR: VENTANAS
hD,Ham= fir1(M,ΩC,Hamming(M+1))hD,Han= fir1(M,ΩC,Hann(M+1))
hD,Blac= fir1(M,ΩC,Blackman(M+1)) hD,kaiser= fir1(M,ΩC,kaiser(M+1,β))0 2 4 6 8 10 12 14 16
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3Respuesta al impulso del filtro utilizando la ventana de Kaiser
n
|hDK
ai[n
]
0 10 20 30 40 50 60 70-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3Respuesta al impulso del filtro utilizando la ventana de Blackman
n
|hDB
Lan[
n]
0 5 10 15 20 25 30 35 40 45-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3Respuesta al impulso del filtro utilizando la ventana de Hamming
n
|hDH
am[n
]
0 5 10 15 20 25 30 35 40-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3Respuesta al impulso del filtro utilizando la ventana de Hanning
n
|hDH
an[n
]

DISEÑO DE FILTROS FIR: VENTANAS
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
Ω
|HD( Ω
)|
Módulo de la respuesta en frecuencia del filtro
HanningHammingBlackmanKaiser
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.85
0.9
0.95
1
1.05
1.1
1.15
Ω
|HD( Ω
)|
Módulo de la respuesta en frecuencia del filtro
HanningHammingBlackmanKaiser
1 1.5 2 2.5 30
0.05
0.1
0.15
0.2
0.25
Ω
|HD( Ω
)|
Módulo de la respuesta en frecuencia del filtro
HanningHammingBlackmanKaiser

DISEÑO DE FILTROS: COMPARACIÓN IIR - FIR
La perturbación debido a la recursividad del filtro puede afectar a la señal de salida de forma indefinida.
Si la realización es no recursiva la salida del sistema puede verse afectada por su estado inicial o por cualquier interferencia de corta duración durante la longitud de la respuesta al impulso.
7.- Sensibilidad a las interferencias
No se requiere un computador grande y suele utilizarse la transformación bilineal con lo que no son demasiados cálculos. Son poco complejos.
Se requiere un computador de tamaño medio y la complejidad depende de la longitud de su h[n].
6.-Carga computacional y complejidad
Sólo puede usarse la estructura recursiva. La más utilizada es la de cascada de secciones de primer y segundo orden.
Admiten estructuras recursivas y no recursivas. La estructura más utilizada es la no recursiva denominada filtro transversal
5.- Estructura
Pueden ser inestables si los polos caen fuera de la circunferencia unidad.
Son siempre estables4.- Estabilidad
Sólo puede conseguirse fase lineal utilizando ecualizadores con lo que el filtro es más complejo.
Es posible conseguir fase lineal.3.- Característica de fase
Se consiguen selectividades altas con órdenes reducidos al disponer de pares polo-cero. Es posible diseñar todo tipo de filtros.
Para selectividades altas se requieren órdenes altos (todos los polos están en z = 0). No es posible diseñar filtros paso todo.
2.- Respuesta en frecuencia
Contiene polos y ceros en puntos finitos de z, ello proporciona mayor flexibilidad en el diseño de filtros sencillos (método de ubicación de ceros y polos)
Sólo contiene ceros, todos sus polos en el origen, excepto si se emplea muestreo en frecuencia
1.- Función del sistema H(z)
IIRFIR

Necesitan menos memoria ya que el número de coeficientes es menor que el equivalente FIR.
Necesitan mucha memoria para almacenar la muestra actual y las anteriores de la señal de entrada, así como los coeficientes del filtro.
9.- Memoria
Es un problema importante puesto que puede hacerse inestable. Pueden producirse oscilaciones indeseadas a causa del desbordamiento (Oscilación de overflow) o oscilaciones de ciclo límite.
Con estructura no recursiva no es un problema importante. Cuando estos filtros se realizan de forma recursiva debe conseguirse una cancelación exacta de polos y ceros después de la cuantificación obligándonos a utilizar longitudes de palabra mayores.
8.- Efecto de la cuanti-ficación de los coeficientes
DISEÑO DE FILTROS: COMPARACIÓN IIR - FIR

















