Se˜ nales y sistemas en tiempo discreto Filtros en tiempo discreto Dise˜ no de filtros IIR Dise˜ no de filtros FIR Laboratorio de Procesamiento de Se˜ nales y Comunicaciones Dise˜ no de filtros en tiempo discreto Dr. Ing. Leonardo Rey Vega Seminario de Sistemas Embebidos Noviembre 2010 LPSC - Facultad de Ingenier´ ıa Seminario de Sistemas Embebidos
Transcript
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Laboratorio deProcesamiento de Senales yComunicaciones
Diseno de filtros en tiempo discreto
Dr. Ing. Leonardo Rey Vega
Seminario de Sistemas Embebidos
Noviembre 2010
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Resumen
1 Senales y sistemas en tiempo discreto
2 Filtros en tiempo discreto
3 Diseno de filtros IIR
4 Diseno de filtros FIR
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Procesamiento de Senales en tiempo discreto
El procesamiento digital de senales es un area de sumaimportancia presente en
Aplicaciones de consumo masivo (ej: comunicaciones)
Aplicaciones tecnologicas de punta (ej: aplicacionesmilitares y espaciales)
La evolucion de las tecnologıas de dispositivos electronicos y losmicroprocesadores ha permitido satisfacer la demanda creciente
de implementacion algoritmos complejos de tratamiento desenales.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas I
En tiempo discreto las senales seran secuencias:
x(n), −∞ < n <∞
En la practica x(n) toman unconjunto discreto de valores!!
En forma equivalente las senales se pueden representar como:
X(z) =∞∑
n=−∞x(n)z−n x(n) =
1
2πj
∮CX(z)zn−1dz
Es necesario especificar la region de convergencia:
ROC =
z ∈ C :
∞∑n=−∞
∣∣x(n)z−n∣∣ <∞
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas I
En tiempo discreto las senales seran secuencias:
x(n), −∞ < n <∞En la practica x(n) toman unconjunto discreto de valores!!
En forma equivalente las senales se pueden representar como:
X(z) =∞∑
n=−∞x(n)z−n x(n) =
1
2πj
∮CX(z)zn−1dz
Es necesario especificar la region de convergencia:
ROC =
z ∈ C :
∞∑n=−∞
∣∣x(n)z−n∣∣ <∞
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas I
En tiempo discreto las senales seran secuencias:
x(n), −∞ < n <∞En la practica x(n) toman unconjunto discreto de valores!!
En forma equivalente las senales se pueden representar como:
X(z) =
∞∑n=−∞
x(n)z−n
x(n) =1
2πj
∮CX(z)zn−1dz
Es necesario especificar la region de convergencia:
ROC =
z ∈ C :
∞∑n=−∞
∣∣x(n)z−n∣∣ <∞
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas I
En tiempo discreto las senales seran secuencias:
x(n), −∞ < n <∞En la practica x(n) toman unconjunto discreto de valores!!
En forma equivalente las senales se pueden representar como:
X(z) =
∞∑n=−∞
x(n)z−n x(n) =1
2πj
∮CX(z)zn−1dz
Es necesario especificar la region de convergencia:
ROC =
z ∈ C :
∞∑n=−∞
∣∣x(n)z−n∣∣ <∞
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas II
Con z = ejω obtenemos:
X(ejω) =
∞∑n=−∞
x(n)e−jωn
x(n) =1
2π
∫ π
−πX(ejω)ejωndω
La transformada de Fourier esta definida para secuencias en `1
(∑∞
n=−∞ |x(n)| <∞) aunque puede ser extendida a la clase `2
(∑∞
n=−∞ |x(n)|2 <∞)
Ejemplo:
x(n) =sin (ωcn)
πn
No es `1 pero su transformada deFourier esta bien definida y es bienconocida por todos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas II
Con z = ejω obtenemos:
X(ejω) =
∞∑n=−∞
x(n)e−jωn x(n) =1
2π
∫ π
−πX(ejω)ejωndω
La transformada de Fourier esta definida para secuencias en `1
(∑∞
n=−∞ |x(n)| <∞) aunque puede ser extendida a la clase `2
(∑∞
n=−∞ |x(n)|2 <∞)
Ejemplo:
x(n) =sin (ωcn)
πn
No es `1 pero su transformada deFourier esta bien definida y es bienconocida por todos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas II
Con z = ejω obtenemos:
X(ejω) =
∞∑n=−∞
x(n)e−jωn x(n) =1
2π
∫ π
−πX(ejω)ejωndω
La transformada de Fourier esta definida para secuencias en `1
(∑∞
n=−∞ |x(n)| <∞) aunque puede ser extendida a la clase `2
(∑∞
n=−∞ |x(n)|2 <∞)
Ejemplo:
x(n) =sin (ωcn)
πn
No es `1 pero su transformada deFourier esta bien definida y es bienconocida por todos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas II
Con z = ejω obtenemos:
X(ejω) =
∞∑n=−∞
x(n)e−jωn x(n) =1
2π
∫ π
−πX(ejω)ejωndω
La transformada de Fourier esta definida para secuencias en `1
(∑∞
n=−∞ |x(n)| <∞) aunque puede ser extendida a la clase `2
(∑∞
n=−∞ |x(n)|2 <∞)
Ejemplo:
x(n) =sin (ωcn)
πn
No es `1 pero su transformada deFourier esta bien definida y es bienconocida por todos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Secuencias y transformadas II
Con z = ejω obtenemos:
X(ejω) =
∞∑n=−∞
x(n)e−jωn x(n) =1
2π
∫ π
−πX(ejω)ejωndω
La transformada de Fourier esta definida para secuencias en `1
(∑∞
n=−∞ |x(n)| <∞) aunque puede ser extendida a la clase `2
(∑∞
n=−∞ |x(n)|2 <∞)
Ejemplo:
x(n) =sin (ωcn)
πn
No es `1 pero su transformada deFourier esta bien definida y es bienconocida por todos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales I
Un sistema en tiempo es discreto es un operador:
y(n) = H [x(n)]
Nos concentraremos en sistemas lineales. La accion de los mismossobre secuencias se puede escribir como:
y(n) =
∞∑k=−∞
h(n, k)x(k)
Si el sistema es lineal e invariante en el tiempo:
y(n) =
∞∑k=−∞
h(n− k)x(k) Y (z) = H(z)X(z)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales I
Un sistema en tiempo es discreto es un operador:
y(n) = H [x(n)]
Nos concentraremos en sistemas lineales. La accion de los mismossobre secuencias se puede escribir como:
y(n) =
∞∑k=−∞
h(n, k)x(k)
Si el sistema es lineal e invariante en el tiempo:
y(n) =
∞∑k=−∞
h(n− k)x(k) Y (z) = H(z)X(z)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales I
Un sistema en tiempo es discreto es un operador:
y(n) = H [x(n)]
Nos concentraremos en sistemas lineales. La accion de los mismossobre secuencias se puede escribir como:
y(n) =
∞∑k=−∞
h(n, k)x(k)
Si el sistema es lineal e invariante en el tiempo:
y(n) =
∞∑k=−∞
h(n− k)x(k)
Y (z) = H(z)X(z)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales I
Un sistema en tiempo es discreto es un operador:
y(n) = H [x(n)]
Nos concentraremos en sistemas lineales. La accion de los mismossobre secuencias se puede escribir como:
y(n) =
∞∑k=−∞
h(n, k)x(k)
Si el sistema es lineal e invariante en el tiempo:
y(n) =
∞∑k=−∞
h(n− k)x(k) Y (z) = H(z)X(z)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .
∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales II
Es importante para nosotros el siguiente concepto de estabilidad:
Un sistema h(n) es estable si para entrada x(n) acotadas secorresponden salidas y(n) = h(n) ∗ x(n) acotadas:
∀x(n) tal que |x(n)| < B1 tenemos |y(n)| < B2 ∀n
Los siguientes son equivalentes para un sistema lineal y causal:
El sistema es estable.
Todos los polos del sistema estan dentro del cırculo unidad.
H(ejω) = H(z)cz=ejω .∑∞k=−∞ |h(k)| <∞.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales III
En general nos interesaran sistemas cuya transferencias son racionales:
H(z) =B(z)
A(z)=
∑Mi=−M biz
−i∑Ni=−N aiz
−i
Si A(z) = z−n0 con n0 ∈ Z el sistema no tiene polos (excepto enz = 0 y z =∞) y es FIR.
Si A(z) 6= z−n0 con n0 ∈ Z el sistema es IIR.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales III
En general nos interesaran sistemas cuya transferencias son racionales:
H(z) =B(z)
A(z)=
∑Mi=−M biz
−i∑Ni=−N aiz
−i
Si A(z) = z−n0 con n0 ∈ Z el sistema no tiene polos (excepto enz = 0 y z =∞) y es FIR.
Si A(z) 6= z−n0 con n0 ∈ Z el sistema es IIR.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales III
En general nos interesaran sistemas cuya transferencias son racionales:
H(z) =B(z)
A(z)=
∑Mi=−M biz
−i∑Ni=−N aiz
−i
Si A(z) = z−n0 con n0 ∈ Z el sistema no tiene polos (excepto enz = 0 y z =∞) y es FIR.
Si A(z) 6= z−n0 con n0 ∈ Z el sistema es IIR.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Sistemas lineales III
En general nos interesaran sistemas cuya transferencias son racionales:
H(z) =B(z)
A(z)=
∑Mi=−M biz
−i∑Ni=−N aiz
−i
Si A(z) = z−n0 con n0 ∈ Z el sistema no tiene polos (excepto enz = 0 y z =∞) y es FIR.
Si A(z) 6= z−n0 con n0 ∈ Z el sistema es IIR.
Los sistemas con transferencia racional son muy importantes porquela implementacion de los mismos se puede realizar mediante
ecuaciones en diferencias!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal I
Un sistema puede caracterizarse como
H(ejω) = |H(ejω)|ejθ(ω)
Se puede pensar que el sistemadistorsiona la senal de entradatanto en amplitud como en fase!
La fase θ(ω) puede ser tan distorsiva como |H(ejω)|!!!
La distorsion introducida por la fase se mide con el retardo de grupo:
α(ω) = −dθ(ω)
dω
Suponga que x(n) es una senal de banda muy angosta centrada en ω0:
x(n) = s(n) cos (ω0n)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal I
Un sistema puede caracterizarse como
H(ejω) = |H(ejω)|ejθ(ω)Se puede pensar que el sistemadistorsiona la senal de entradatanto en amplitud como en fase!
La fase θ(ω) puede ser tan distorsiva como |H(ejω)|!!!
La distorsion introducida por la fase se mide con el retardo de grupo:
α(ω) = −dθ(ω)
dω
Suponga que x(n) es una senal de banda muy angosta centrada en ω0:
x(n) = s(n) cos (ω0n)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal I
Un sistema puede caracterizarse como
H(ejω) = |H(ejω)|ejθ(ω)Se puede pensar que el sistemadistorsiona la senal de entradatanto en amplitud como en fase!
La fase θ(ω) puede ser tan distorsiva como |H(ejω)|!!!
La distorsion introducida por la fase se mide con el retardo de grupo:
α(ω) = −dθ(ω)
dω
Suponga que x(n) es una senal de banda muy angosta centrada en ω0:
x(n) = s(n) cos (ω0n)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal I
Un sistema puede caracterizarse como
H(ejω) = |H(ejω)|ejθ(ω)Se puede pensar que el sistemadistorsiona la senal de entradatanto en amplitud como en fase!
La fase θ(ω) puede ser tan distorsiva como |H(ejω)|!!!
La distorsion introducida por la fase se mide con el retardo de grupo:
α(ω) = −dθ(ω)
dω
Suponga que x(n) es una senal de banda muy angosta centrada en ω0:
x(n) = s(n) cos (ω0n)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal I
Un sistema puede caracterizarse como
H(ejω) = |H(ejω)|ejθ(ω)Se puede pensar que el sistemadistorsiona la senal de entradatanto en amplitud como en fase!
La fase θ(ω) puede ser tan distorsiva como |H(ejω)|!!!
La distorsion introducida por la fase se mide con el retardo de grupo:
α(ω) = −dθ(ω)
dω
Suponga que x(n) es una senal de banda muy angosta centrada en ω0:
x(n) = s(n) cos (ω0n)
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal II
Se puede probar que si se pasa x(n) a traves del sistema H(ejω):
y(n) ≈ |H(ejω0)|s(n− α(ω0)) cos (θ0 + (n− α(ω0))ω0)
En este caso la senal se modifica con un escalaje y un simple retardodado por α(ω0)!!
Suponga que |H(ejω)| = 1, ∀ω y que la senal x(n) ahora no es bandatan angosta. Cada una de las componentes de x(n) expresadas comoa(ω)ejωn a la salida del sistema se modifica como:
a(ω)ejω(n+θ(ω)), y(n) =1
2π
∫ π
−πa(ω)ejω(n+θ(ω))dω
Para cada componente el retardo es diferente!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal II
Se puede probar que si se pasa x(n) a traves del sistema H(ejω):
y(n) ≈ |H(ejω0)|s(n− α(ω0)) cos (θ0 + (n− α(ω0))ω0)
En este caso la senal se modifica con un escalaje y un simple retardodado por α(ω0)!!
Suponga que |H(ejω)| = 1, ∀ω y que la senal x(n) ahora no es bandatan angosta. Cada una de las componentes de x(n) expresadas comoa(ω)ejωn a la salida del sistema se modifica como:
a(ω)ejω(n+θ(ω)), y(n) =1
2π
∫ π
−πa(ω)ejω(n+θ(ω))dω
Para cada componente el retardo es diferente!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal II
Se puede probar que si se pasa x(n) a traves del sistema H(ejω):
y(n) ≈ |H(ejω0)|s(n− α(ω0)) cos (θ0 + (n− α(ω0))ω0)
En este caso la senal se modifica con un escalaje y un simple retardodado por α(ω0)!!
Suponga que |H(ejω)| = 1, ∀ω y que la senal x(n) ahora no es bandatan angosta. Cada una de las componentes de x(n) expresadas comoa(ω)ejωn a la salida del sistema se modifica como:
a(ω)ejω(n+θ(ω)), y(n) =1
2π
∫ π
−πa(ω)ejω(n+θ(ω))dω
Para cada componente el retardo es diferente!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal II
Se puede probar que si se pasa x(n) a traves del sistema H(ejω):
y(n) ≈ |H(ejω0)|s(n− α(ω0)) cos (θ0 + (n− α(ω0))ω0)
En este caso la senal se modifica con un escalaje y un simple retardodado por α(ω0)!!
Suponga que |H(ejω)| = 1, ∀ω y que la senal x(n) ahora no es bandatan angosta. Cada una de las componentes de x(n) expresadas comoa(ω)ejωn a la salida del sistema se modifica como:
a(ω)ejω(n+θ(ω)), y(n) =1
2π
∫ π
−πa(ω)ejω(n+θ(ω))dω
Para cada componente el retardo es diferente!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal II
Se puede probar que si se pasa x(n) a traves del sistema H(ejω):
y(n) ≈ |H(ejω0)|s(n− α(ω0)) cos (θ0 + (n− α(ω0))ω0)
En este caso la senal se modifica con un escalaje y un simple retardodado por α(ω0)!!
Suponga que |H(ejω)| = 1, ∀ω y que la senal x(n) ahora no es bandatan angosta. Cada una de las componentes de x(n) expresadas comoa(ω)ejωn a la salida del sistema se modifica como:
a(ω)ejω(n+θ(ω)), y(n) =1
2π
∫ π
−πa(ω)ejω(n+θ(ω))dω
Para cada componente el retardo es diferente!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal III
Si θ(ω) = −βω, entonces:
y(n) =1
2π
∫ π
−πa(ω)ejω(n−β)dω = x(n− β)
La senal de salida es una copia desplazada en el tiempo del la senal deentrada!! La senal de salida conserva su forma temporal!!
El retardo de grupo α(ω) es constante para todo ω. El sistema tienefase lineal!
Muchas aplicaciones requieren que los filtros que se implemententengan fase lineal (ej: aplicaciones para medicina).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal III
Si θ(ω) = −βω, entonces:
y(n) =1
2π
∫ π
−πa(ω)ejω(n−β)dω = x(n− β)
La senal de salida es una copia desplazada en el tiempo del la senal deentrada!! La senal de salida conserva su forma temporal!!
El retardo de grupo α(ω) es constante para todo ω. El sistema tienefase lineal!
Muchas aplicaciones requieren que los filtros que se implemententengan fase lineal (ej: aplicaciones para medicina).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal III
Si θ(ω) = −βω, entonces:
y(n) =1
2π
∫ π
−πa(ω)ejω(n−β)dω = x(n− β)
La senal de salida es una copia desplazada en el tiempo del la senal deentrada!! La senal de salida conserva su forma temporal!!
El retardo de grupo α(ω) es constante para todo ω. El sistema tienefase lineal!
Muchas aplicaciones requieren que los filtros que se implemententengan fase lineal (ej: aplicaciones para medicina).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal III
Si θ(ω) = −βω, entonces:
y(n) =1
2π
∫ π
−πa(ω)ejω(n−β)dω = x(n− β)
La senal de salida es una copia desplazada en el tiempo del la senal deentrada!! La senal de salida conserva su forma temporal!!
El retardo de grupo α(ω) es constante para todo ω. El sistema tienefase lineal!
Muchas aplicaciones requieren que los filtros que se implemententengan fase lineal (ej: aplicaciones para medicina).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal IV
Ejemplo: Sistema pasatodo con polos complejos conjugados ena = 0,95e±jπ/4
H(z) =z−2 − 2<(a)z−1 + |a|2
1− 2<(a)z−1 + |a|2z−2
−3 −2 −1 0 1 2 30
5
10
15
20
25
30
35
40
Ret
ardo
de
grup
o (e
n m
uest
ras)
Frecuencia en radianes
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Fase lineal IV
Ejemplo: Sistema pasatodo con polos complejos conjugados ena = 0,95e±jπ/4
H(z) =z−2 − 2<(a)z−1 + |a|2
1− 2<(a)z−1 + |a|2z−2
−3 −2 −1 0 1 2 30
5
10
15
20
25
30
35
40
Ret
ardo
de
grup
o (e
n m
uest
ras)
Frecuencia en radianes
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros en tiempo discreto
Las aplicaciones de filtros en tiempo discreto son muchısimas:
Sistemas de comunicaciones.
Aplicaciones de ingenierıa biomedicas.
Procesamiento de habla.
Procesamiento digital de audio.
Procesamiento de imagenes.
Tecnicas de procesamiento de senales avanzadas: bancos defiltros, wavelets, etc.
Tecnicas de estimacion de procesos estocasticos.
Tecnicas de beamforming y antenas inteligentes.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
Nos ocuparemos de la etapa numero 2
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Etapas de diseno
Las etapas de diseno de un filtro en tiempo discreto son:
1 Especificacion de las propiedades deseadas (dependiente de laaplicacion).
2 Aproximacion de las especificaciones mediante un sistema entiempo discreto.
3 Realizacion del sistema.
La aproximacion se hara mediante funciones transferencias racionales,estables y causales:
Filtros IIR.
Filtros FIR.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Especificaciones de filtros en tiempo discreto
0
1
1+δ+
1−δ−
δs
ωp ω
c ωs
π
Se especifican:
Frecuencia de paso: ωp.
Frecuencia de atenuacion: ωs
Ripple en la banda de paso
δp = maxδ+, δ
−
oAp = 20 log10
(1± δp
).
Ripple en la banda de atenuacion: δs o
As = −20 log10 δs
.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Caracterısticas de filtros IIR
Ventajas:
Las tecnicas mas populares de diseno usan filtros en tiempocontinuo como prototipos.
Formulas que dan los coeficientes de los filtros en forma cerrada.
Especificaciones exigentes llevan a filtros con un numero pequenode coeficientes lo que implica bajo costo computacional.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Caracterısticas de filtros IIR
Ventajas:
Las tecnicas de diseno usan filtros en tiempo continuo comoprototipos.
Formulas que dan los coeficientes de los filtros en forma cerrada.
Especificaciones exigentes llevan a filtros con un numero pequenode coeficientes lo que implica bajo costo computacional.
Desventajas:
Es necesario tener especial cuidado si se trabaja en precisionfinita.
No es posible tener filtros con fase lineal en forma exacta.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de diseno
Dado que la idea los metodos de diseno de filtros IIR en tiempodiscreto es usar prototipos en tiempo continuo debemos tener encuenta los siguiente:
Dado que nuestras especificaciones son para el filtro en tiempodiscreto debemos ser capaces de trasladar dichas especificacionesa tiempo continuo para disenar el prototipo.
Al pasar del filtro de tiempo continuo al filtro en tiempo discretodebemos mantener la causalidad y estabilidad.
Los metodos usuales de diseno son:
Invarianza al impulso.
Transformacion bilineal.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de diseno
Dado que la idea los metodos de diseno de filtros IIR en tiempodiscreto es usar prototipos en tiempo continuo debemos tener encuenta los siguiente:
Dado que nuestras especificaciones son para el filtro en tiempodiscreto debemos ser capaces de trasladar dichas especificacionesa tiempo continuo para disenar el prototipo.
Al pasar del filtro de tiempo continuo al filtro en tiempo discretodebemos mantener la causalidad y estabilidad.
Los metodos usuales de diseno son:
Invarianza al impulso.
Transformacion bilineal.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de diseno
Dado que la idea los metodos de diseno de filtros IIR en tiempodiscreto es usar prototipos en tiempo continuo debemos tener encuenta los siguiente:
Dado que nuestras especificaciones son para el filtro en tiempodiscreto debemos ser capaces de trasladar dichas especificacionesa tiempo continuo para disenar el prototipo.
Al pasar del filtro de tiempo continuo al filtro en tiempo discretodebemos mantener la causalidad y estabilidad.
Los metodos usuales de diseno son:
Invarianza al impulso.
Transformacion bilineal.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de diseno
Dado que la idea los metodos de diseno de filtros IIR en tiempodiscreto es usar prototipos en tiempo continuo debemos tener encuenta los siguiente:
Dado que nuestras especificaciones son para el filtro en tiempodiscreto debemos ser capaces de trasladar dichas especificacionesa tiempo continuo para disenar el prototipo.
Al pasar del filtro de tiempo continuo al filtro en tiempo discretodebemos mantener la causalidad y estabilidad.
Los metodos usuales de diseno son:
Invarianza al impulso.
Transformacion bilineal.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso I
La idea basica es obtener la respuesta al impulso en tiempo discretomuestreando la respuesta al impulso del prototipo en tiempo continuo:
h(n) = Thc(nT )
En el campo transformado:
H(ejω) =∞∑
k=−∞
Hc
(ω
T+
2πk
T
)Si el filtro en tiempo continuo es de banda limitada:
Hc(Ω) = 0, |Ω| ≥ π
T
H(ejω) = Hc
(ωT
), |ω| ≤ π
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso I
La idea basica es obtener la respuesta al impulso en tiempo discretomuestreando la respuesta al impulso del prototipo en tiempo continuo:
h(n) = Thc(nT )
En el campo transformado:
H(ejω) =
∞∑k=−∞
Hc
(ω
T+
2πk
T
)
Si el filtro en tiempo continuo es de banda limitada:
Hc(Ω) = 0, |Ω| ≥ π
T
H(ejω) = Hc
(ωT
), |ω| ≤ π
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso I
La idea basica es obtener la respuesta al impulso en tiempo discretomuestreando la respuesta al impulso del prototipo en tiempo continuo:
h(n) = Thc(nT )
En el campo transformado:
H(ejω) =
∞∑k=−∞
Hc
(ω
T+
2πk
T
)Si el filtro en tiempo continuo es de banda limitada:
Hc(Ω) = 0, |Ω| ≥ π
T
H(ejω) = Hc
(ωT
), |ω| ≤ π
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso II
Debido al aliasing inherente de la tecnica y a la imposibilidad deobtener filtros en tiempo continuo de banda limitada se debe tener
especial cuidado en el diseno.
Muchas veces se tiene que Hc (Ω) ≈ 0 si |Ω| ≥ π/T con lo se puedeasumir sin muchos problemas que:
H(ejω) ≈ Hc
(ωT
), |ω| ≤ π
Es importante notar que:
Ω =ω
T
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso II
Debido al aliasing inherente de la tecnica y a la imposibilidad deobtener filtros en tiempo continuo de banda limitada se debe tener
especial cuidado en el diseno.
Muchas veces se tiene que Hc (Ω) ≈ 0 si |Ω| ≥ π/T con lo se puedeasumir sin muchos problemas que:
H(ejω) ≈ Hc
(ωT
), |ω| ≤ π
Es importante notar que:
Ω =ω
T
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso II
Debido al aliasing inherente de la tecnica y a la imposibilidad deobtener filtros en tiempo continuo de banda limitada se debe tener
especial cuidado en el diseno.
Muchas veces se tiene que Hc (Ω) ≈ 0 si |Ω| ≥ π/T con lo se puedeasumir sin muchos problemas que:
H(ejω) ≈ Hc
(ωT
), |ω| ≤ π
Es importante notar que:
Ω =ω
T
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso II
Debido al aliasing inherente de la tecnica y a la imposibilidad deobtener filtros en tiempo continuo de banda limitada se debe tener
especial cuidado en el diseno.
Muchas veces se tiene que Hc (Ω) ≈ 0 si |Ω| ≥ π/T con lo se puedeasumir sin muchos problemas que:
H(ejω) ≈ Hc
(ωT
), |ω| ≤ π
Es importante notar que:
Ω =ω
T
Esta ecuacion basica nos permite obtener lasespecificaciones del filtro prototipo en tiempo
continuo a partir de las correspondientes al filtro entiempo discreto.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso II
Debido al aliasing inherente de la tecnica y a la imposibilidad deobtener filtros en tiempo continuo de banda limitada se debe tener
especial cuidado en el diseno.
Muchas veces se tiene que Hc (Ω) ≈ 0 si |Ω| ≥ π/T con lo se puedeasumir sin muchos problemas que:
H(ejω) ≈ Hc
(ωT
), |ω| ≤ π
Es importante notar que:
Ω =ω
T
Las especificaciones relacionadas con los ripples enla la banda de paso y de atenuacion permaneceninvariantes (solo si el aliasing es despreciable!).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =
N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =
N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =
N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =
N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Invarianza al impulso III
Metodo de diseno:
1 Sean las especificaciones del filtro en tiempo discreto. Para un simplepasabajos: ωs, ωp, As y Ap. Elegimos T (ej: T = 1.)
2 Obtenemos las especificaciones en tiempo discreto: Ωp = ωp/T ,Ωs = ωs/T (suponemos que el aliasing es despreciable.)
3 Generamos la transferencia racional del filtro de tiempo continuoprototipo Hc(s) y la escribimos como Hc(s) =
∑Nk=1
Aks−ak
.
4 Dado que hc(t) =∑Nk=1 Ake
aktu(t) (<ak < 0 ya que Hc(s) esestable):
h(n) = Thc(nT ) =N∑k=1
TAkeakTnu(n) −→ H(z) =
N∑k=1
TAk1− eakT z−1
Es claro que si Hc(t) es estable H(z) tambien lo sera.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal I
Esta tecnica elimina el problema del aliasing introduciendo una compresiondel eje de frecuencias. Para ello se usa la siguiente transformacion:
s =2
T
(1− z−1
1 + z−1
)
Esta es una transformacion conforme:
El semiplano izquierdo en s setransforma en el interior de |z| = 1 yviceversa.
El eje jΩ se mapea en el cırculo|z| = 1.
Se conservan la causalidad y laestabilidad!
El filtro en tiempo discreto:
H(z) = Hc
[2
T
(1− z−1
1 + z−1
)] Se ve que no existe el problema delaliasing! Se puede usar este metodo para
disenar filtros pasabanda y pasaaltos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal I
Esta tecnica elimina el problema del aliasing introduciendo una compresiondel eje de frecuencias. Para ello se usa la siguiente transformacion:
s =2
T
(1− z−1
1 + z−1
)Esta es una transformacion conforme:
El semiplano izquierdo en s setransforma en el interior de |z| = 1 yviceversa.
El eje jΩ se mapea en el cırculo|z| = 1.
Se conservan la causalidad y laestabilidad!
El filtro en tiempo discreto:
H(z) = Hc
[2
T
(1− z−1
1 + z−1
)] Se ve que no existe el problema delaliasing! Se puede usar este metodo para
disenar filtros pasabanda y pasaaltos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal I
Esta tecnica elimina el problema del aliasing introduciendo una compresiondel eje de frecuencias. Para ello se usa la siguiente transformacion:
s =2
T
(1− z−1
1 + z−1
)Esta es una transformacion conforme:
El semiplano izquierdo en s setransforma en el interior de |z| = 1 yviceversa.
El eje jΩ se mapea en el cırculo|z| = 1.
Se conservan la causalidad y laestabilidad!
El filtro en tiempo discreto:
H(z) = Hc
[2
T
(1− z−1
1 + z−1
)]
Se ve que no existe el problema delaliasing! Se puede usar este metodo para
disenar filtros pasabanda y pasaaltos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal I
Esta tecnica elimina el problema del aliasing introduciendo una compresiondel eje de frecuencias. Para ello se usa la siguiente transformacion:
s =2
T
(1− z−1
1 + z−1
)Esta es una transformacion conforme:
El semiplano izquierdo en s setransforma en el interior de |z| = 1 yviceversa.
El eje jΩ se mapea en el cırculo|z| = 1.
Se conservan la causalidad y laestabilidad!
El filtro en tiempo discreto:
H(z) = Hc
[2
T
(1− z−1
1 + z−1
)] Se ve que no existe el problema delaliasing! Se puede usar este metodo para
disenar filtros pasabanda y pasaaltos!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal II
Es posible probar que:
Ω =2
Ttan
(ω2
), ω = 2 arctan
(ΩT
2
)
−20 −15 −10 −5 0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4
Ω
ω
−π
π
ω=2arctan(Ω T/2), T=1
La compresion del eje defrecuencias puede traerproblemas para algunosdisenos particulares. Sinembargo para disenos querequieren bandas conganancias y atenuacionesconstantes no suele haberproblemas.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Transformacion bilineal II
Es posible probar que:
Ω =2
Ttan
(ω2
), ω = 2 arctan
(ΩT
2
)
−20 −15 −10 −5 0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4
Ω
ω
−π
π
ω=2arctan(Ω T/2), T=1
La compresion del eje defrecuencias puede traerproblemas para algunosdisenos particulares. Sinembargo para disenos querequieren bandas conganancias y atenuacionesconstantes no suele haberproblemas.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Ejemplo
0 0.5 1 1.5 2 2.5 3−350
−300
−250
−200
−150
−100
−50
0
50
Frecuencia en radianes
Mag
nitu
d (d
B)
Invarianza al imp.T. bilineal
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
14
16
18
20
Frecuencia en radianesR
etar
do d
e gr
upo
(mue
stra
s)
Invarianza al imp.T. bilineal
Filtro pasabajo con especificaciones:
0,95 ≤ |H(ejω
)| ≤ 1 0 ≤ ω ≤ 0,25π
|H(ejω
)| ≤ 0,05 0,35π ≤ ω ≤ π
Diseno usando T = 1 con un filtro prototipotipo Butterworth con N = 9 y Ωc = 0,7808.Para ambos disenos el numero decoeficientes en numerador y denominador esmenor o igual a 11.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Caracterısticas de filtros FIR
Ventajas:
Filtros que son inherentemente estables.
Es posible disenarlos con fase lineal.
Generalmente son suficientemente robustos cuando sonimplementados en precision finita.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Caracterısticas de filtros FIR
Ventajas:
Filtros que son inherentemente estables.
Es posible disenarlos con fase lineal.
Generalmente son suficientemente robustos cuando sonimplementados en precision finita.
Desventajas:
Son computacionalmente mas complejos que un filtro IIRcon las mismas especificaciones.
No siempre es posible obtener los coeficientes en formacerrada.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal I
Teorema
Un filtro h(n) real, causal, estable y con transferencia racional es defase lineal sı y solo sı es FIR y
h(n) = ±h(N − n), H(z) =
N∑n=0
h(n)z−n.
Existen 4 clases de sistemas con fase lineal:
Tipo I: h(n) = h(N − n) con N par.
Tipo II: h(n) = h(N − n) con N impar.
Tipo III: h(n) = −h(N − n) con N impar.
Tipo IV: h(n) = −h(N − n) con N par.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal I
Teorema
Un filtro h(n) real, causal, estable y con transferencia racional es defase lineal sı y solo sı es FIR y
h(n) = ±h(N − n), H(z) =
N∑n=0
h(n)z−n.
Existen 4 clases de sistemas con fase lineal:
Tipo I: h(n) = h(N − n) con N par.
Tipo II: h(n) = h(N − n) con N impar.
Tipo III: h(n) = −h(N − n) con N impar.
Tipo IV: h(n) = −h(N − n) con N par.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal II
Es posible probar que para los sistemas FIR de fase lineal:
H(z) = ±z−NH(z−1)
Si z0 es cero entonces 1/z0 escero!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal II
Es posible probar que para los sistemas FIR de fase lineal:
H(z) = ±z−NH(z−1) Si z0 es cero entonces 1/z0 escero!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal II
Es posible probar que para los sistemas FIR de fase lineal:
H(z) = ±z−NH(z−1) Si z0 es cero entonces 1/z0 escero!!
−1.5 −1 −0.5 0 0.5 1 1.5
−1
−0.5
0
0.5
1
Real Part
Imag
inar
y P
art
40
Pole/Zero Plot
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros FIR de fase lineal II
Es posible probar que para los sistemas FIR de fase lineal:
H(z) = ±z−NH(z−1) Si z0 es cero entonces 1/z0 escero!!
Para z = −1 y sistemas tipo I y II H(−1) = (−1)NH(−1).Entonces sistemas Tipo II no sirven para disenar pasaaltos!!
Para z = 1 y sistemas tipo III y IV H(1) = −H(1). Ningunsistema tipo III y IV sirve para disenar pasabajos!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Tecnicas de diseno de filtros FIR
Metodos de ventaneo.
Diseno por cuadrados mınimos.
Disenos equirriple.
Eigenfilters.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Todas estas tecnicas permiten obtener disenos con fase lineal.
Estas tecnicas pueden ser modificadas para obtener respuestas defiltros multibanda y otras especificaciones en lugar de fase lineal (ej:
filtros de fase mınima).
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo I
El filtro pasabajo ideal:
HI(ejω) =
1 0 ≤ |ω| ≤ ωc0 ωc ≤ |ω| ≤ π
hI(n) =sinωcn
πn, −∞ < n <∞
Este filtro es IIR y nocausal!!
Este filtro se podrıa aproximar como:
h(n) =sinωc(n−N)
πn, 0 ≤ n ≤ 2N
h(n) es de fase lineal y es equivalente a multiplicar sinωc(n−N)πn por
una ventana rectangular de tamano 2N
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo I
El filtro pasabajo ideal:
HI(ejω) =
1 0 ≤ |ω| ≤ ωc0 ωc ≤ |ω| ≤ π
hI(n) =sinωcn
πn, −∞ < n <∞
Este filtro es IIR y nocausal!!
Este filtro se podrıa aproximar como:
h(n) =sinωc(n−N)
πn, 0 ≤ n ≤ 2N
h(n) es de fase lineal y es equivalente a multiplicar sinωc(n−N)πn por
una ventana rectangular de tamano 2N
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo I
El filtro pasabajo ideal:
HI(ejω) =
1 0 ≤ |ω| ≤ ωc0 ωc ≤ |ω| ≤ π
hI(n) =sinωcn
πn, −∞ < n <∞
Este filtro es IIR y nocausal!!
Este filtro se podrıa aproximar como:
h(n) =sinωc(n−N)
πn, 0 ≤ n ≤ 2N
h(n) es de fase lineal y es equivalente a multiplicar sinωc(n−N)πn por
una ventana rectangular de tamano 2N
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo II
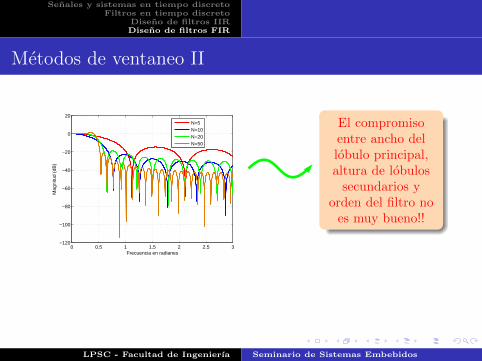
0 0.5 1 1.5 2 2.5 3−120
−100
−80
−60
−40
−20
0
20
Frecuencia en radianes
Mag
nitu
d (d
B)
N=5N=10N=20N=50
El compromisoentre ancho dellobulo principal,altura de lobulos
secundarios yorden del filtro no
es muy bueno!!
La idea es buscar ventanas que mejoren estos compromisos!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo II
0 0.5 1 1.5 2 2.5 3−120
−100
−80
−60
−40
−20
0
20
Frecuencia en radianes
Mag
nitu
d (d
B)
N=5N=10N=20N=50
El compromisoentre ancho dellobulo principal,altura de lobulos
secundarios yorden del filtro no
es muy bueno!!
La idea es buscar ventanas que mejoren estos compromisos!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo II
0 0.5 1 1.5 2 2.5 3−120
−100
−80
−60
−40
−20
0
20
Frecuencia en radianes
Mag
nitu
d (d
B)
N=5N=10N=20N=50
El compromisoentre ancho dellobulo principal,altura de lobulos
secundarios yorden del filtro no
es muy bueno!!
La idea es buscar ventanas que mejoren estos compromisos!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo III
Es de interes conocer como es la “mejor” ventana v(n) de tamano Ny frecuencia de corte σ:
mınv(n)
12π
∫|ω≥σ| |V (ejω)|2dω
12π
∫ π−π |V (ejω)|2dω
0 0.5 1 1.5 2 2.5 3−80
−70
−60
−50
−40
−30
−20
−10
0
Frecuencia angular
Mag
nitu
d (d
B)
DPSSVentana regular
La solucion a este problema es lo que se conoce como Discrete prolatespheroidal sequence (DPSS). Esto es muy complejo de calcular y por eso se
buscan aproximaciones a esta ventana optima.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo III
Es de interes conocer como es la “mejor” ventana v(n) de tamano Ny frecuencia de corte σ:
mınv(n)
12π
∫|ω≥σ| |V (ejω)|2dω
12π
∫ π−π |V (ejω)|2dω
0 0.5 1 1.5 2 2.5 3−80
−70
−60
−50
−40
−30
−20
−10
0
Frecuencia angular
Mag
nitu
d (d
B)
DPSSVentana regular
La solucion a este problema es lo que se conoce como Discrete prolatespheroidal sequence (DPSS). Esto es muy complejo de calcular y por eso se
buscan aproximaciones a esta ventana optima.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo III
Es de interes conocer como es la “mejor” ventana v(n) de tamano Ny frecuencia de corte σ:
mınv(n)
12π
∫|ω≥σ| |V (ejω)|2dω
12π
∫ π−π |V (ejω)|2dω
0 0.5 1 1.5 2 2.5 3−80
−70
−60
−50
−40
−30
−20
−10
0
Frecuencia angular
Mag
nitu
d (d
B)
DPSSVentana regular
La solucion a este problema es lo que se conoce como Discrete prolatespheroidal sequence (DPSS). Esto es muy complejo de calcular y por eso se
buscan aproximaciones a esta ventana optima.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo III
Es de interes conocer como es la “mejor” ventana v(n) de tamano Ny frecuencia de corte σ:
mınv(n)
12π
∫|ω≥σ| |V (ejω)|2dω
12π
∫ π−π |V (ejω)|2dω
0 0.5 1 1.5 2 2.5 3−80
−70
−60
−50
−40
−30
−20
−10
0
Frecuencia angular
Mag
nitu
d (d
B)
DPSSVentana regular
La solucion a este problema es lo que se conoce como Discrete prolatespheroidal sequence (DPSS). Esto es muy complejo de calcular y por eso se
buscan aproximaciones a esta ventana optima.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo IV
Una muy buena approximacion a esta ventana lo constituye la ventana deKaiser:
v(n) =
I0
[β(1−[2n/N−1]2)1/2
]I0(β)
0 ≤ n ≤ N0 en otro caso
, I0(x) = 1+∞∑k=1
[(0,5x)k
k!
]2
La eleccion de los parametros en funcion de los requerimientos de un filtropasabajo (δ1 = δ2 = δ, As = −20 log10 δ, ∆ω = ωs − ωp):
β =
0,1102(As − 8,7) As > 50
0,5842(As − 21)0,4 + 0,078(As − 21) 21 ≤ As ≤ 500 As < 21
, N =As − 7,95
2,285∆ω
Esta ventana es muy versatil y es la preferida para la mayor parte de losdisenos usando ventaneo!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo IV
Una muy buena approximacion a esta ventana lo constituye la ventana deKaiser:
v(n) =
I0
[β(1−[2n/N−1]2)1/2
]I0(β)
0 ≤ n ≤ N0 en otro caso
, I0(x) = 1+∞∑k=1
[(0,5x)k
k!
]2
La eleccion de los parametros en funcion de los requerimientos de un filtropasabajo (δ1 = δ2 = δ, As = −20 log10 δ, ∆ω = ωs − ωp):
β =
0,1102(As − 8,7) As > 50
0,5842(As − 21)0,4 + 0,078(As − 21) 21 ≤ As ≤ 500 As < 21
, N =As − 7,95
2,285∆ω
Esta ventana es muy versatil y es la preferida para la mayor parte de losdisenos usando ventaneo!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo IV
Una muy buena approximacion a esta ventana lo constituye la ventana deKaiser:
v(n) =
I0
[β(1−[2n/N−1]2)1/2
]I0(β)
0 ≤ n ≤ N0 en otro caso
, I0(x) = 1+∞∑k=1
[(0,5x)k
k!
]2
La eleccion de los parametros en funcion de los requerimientos de un filtropasabajo (δ1 = δ2 = δ, As = −20 log10 δ, ∆ω = ωs − ωp):
β =
0,1102(As − 8,7) As > 50
0,5842(As − 21)0,4 + 0,078(As − 21) 21 ≤ As ≤ 500 As < 21
, N =As − 7,95
2,285∆ω
Esta ventana es muy versatil y es la preferida para la mayor parte de losdisenos usando ventaneo!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo V
Se tienen las siguientes especificaciones:
0,95 ≤ |H(ejω)| ≤ 1,05 0 ≤ ω ≤ 0,125π
|H(ejω)| ≤ 0,05 0,175π ≤ ω ≤ πEn ambos casos el numero de coeficientes es de 26.
0 0.5 1 1.5 2 2.5 3−100
−80
−60
−40
−20
0
20
Frecuencia angular
Mag
nitu
d (d
B)
Diseño con ventana rect.Diseño con ventana de Kaiser
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Metodos de ventaneo V
Se tienen las siguientes especificaciones:
0,95 ≤ |H(ejω)| ≤ 1,05 0 ≤ ω ≤ 0,125π
|H(ejω)| ≤ 0,05 0,175π ≤ ω ≤ πEn ambos casos el numero de coeficientes es de 26.
0 0.5 1 1.5 2 2.5 3−100
−80
−60
−40
−20
0
20
Frecuencia angular
Mag
nitu
d (d
B)
Diseño con ventana rect.Diseño con ventana de Kaiser
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros equirriple I
Si se dispone de especificaciones:
Adi (ejω)− δi ≤ |H(ejω)| ≤ Adi (ejω) + δi, ωi−1 ≤ ω ≤ ωi, i = 1, . . . , B.
Sea Ci = [ωi, ωi−1], C =⋃Bi=1 Ci. La idea de los filtros equirriple encontrar
el filtro H(ejω) tal que:
mınh(n):0≤n≤N
maxω∈C|E(ejω)|, E(ejω) = W (ejω)
[H(ejω)−Ad(ejω)
]
Este es un problema de aproximacion por polinomios trigonometricosde Chebyshev.
El algoritmo para resolverlo es el algoritmo de Remez.
La implementacion de dicho algoritmo para diseno de filtros digitalesmas popular es el algoritmo de Parks-McClellan.
Para unas dadas especificaciones los filtros equirriple dan el menororden posible!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros equirriple I
Si se dispone de especificaciones:
Adi (ejω)− δi ≤ |H(ejω)| ≤ Adi (ejω) + δi, ωi−1 ≤ ω ≤ ωi, i = 1, . . . , B.
Sea Ci = [ωi, ωi−1], C =⋃Bi=1 Ci. La idea de los filtros equirriple encontrar
el filtro H(ejω) tal que:
mınh(n):0≤n≤N
maxω∈C|E(ejω)|, E(ejω) = W (ejω)
[H(ejω)−Ad(ejω)
]Este es un problema de aproximacion por polinomios trigonometricosde Chebyshev.
El algoritmo para resolverlo es el algoritmo de Remez.
La implementacion de dicho algoritmo para diseno de filtros digitalesmas popular es el algoritmo de Parks-McClellan.
Para unas dadas especificaciones los filtros equirriple dan el menororden posible!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros equirriple II
Se tienen las siguientes especificaciones:
0,95 ≤ |H(ejω)| ≤ 1,05 0 ≤ ω ≤ 0,125π
|H(ejω)| ≤ 0,003 0,175π ≤ ω ≤ πEn ambos casos el numero de coeficientes es de 100.
0 0.5 1 1.5 2 2.5 3−120
−100
−80
−60
−40
−20
0
20
Frecuencia angular
Mag
nitu
d (d
B)
Diseño con ventana rect.Diseño equirriple
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Filtros equirriple II
Se tienen las siguientes especificaciones:
0,95 ≤ |H(ejω)| ≤ 1,05 0 ≤ ω ≤ 0,125π
|H(ejω)| ≤ 0,003 0,175π ≤ ω ≤ πEn ambos casos el numero de coeficientes es de 100.
0 0.5 1 1.5 2 2.5 3−120
−100
−80
−60
−40
−20
0
20
Frecuencia angular
Mag
nitu
d (d
B)
Diseño con ventana rect.Diseño equirriple
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
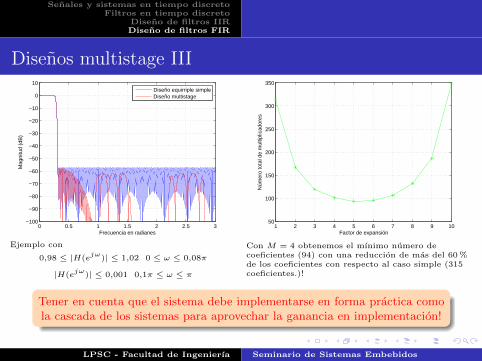
Disenos multistage I
Este metodo esta orientado para el diseno de pasabajos muy estrictos.
La idea es disenar un filtro G(z) conespecificaciones tan severas. Al hacerG(z2) generamos la respuesta quenecesitamos. Pero tambien aparece unacopia no deseada. Dicha copia se puedeeliminar con un filtro no muy estricto.
De esta forma podemos generar un filtroG(z2)A(z) cuya longitud puede ser menor
que la del filtro original H(z)!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage I
Este metodo esta orientado para el diseno de pasabajos muy estrictos.
La idea es disenar un filtro G(z) conespecificaciones tan severas. Al hacerG(z2) generamos la respuesta quenecesitamos. Pero tambien aparece unacopia no deseada. Dicha copia se puedeeliminar con un filtro no muy estricto.
De esta forma podemos generar un filtroG(z2)A(z) cuya longitud puede ser menor
que la del filtro original H(z)!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage I
Este metodo esta orientado para el diseno de pasabajos muy estrictos.
La idea es disenar un filtro G(z) conespecificaciones tan severas. Al hacerG(z2) generamos la respuesta quenecesitamos. Pero tambien aparece unacopia no deseada. Dicha copia se puedeeliminar con un filtro no muy estricto.
De esta forma podemos generar un filtroG(z2)A(z) cuya longitud puede ser menor
que la del filtro original H(z)!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage II
Se sabe que para el filtro H(z) se tiene
NH ≈D(δ1, δ2)
∆ω, ∆ω = ωp − ωs
Claramente G(z) tiene NG = NH/2 coeficientes y A(z) tiene NAcoeficientes que satisfacen NA << NH .
Esto quiere decir que la cascada G(z2)A(z) tiene aproximadamenteNH/2 coeficientes!!. Podemos reducir la cantidad de multiplicaciones
necesarias! (El numero de elementos de memoria necesariospermanece igual).
Esto se puede generalizar al caso en que la expansion se hace con unfactor M generico!! Sin embargo si M es muy grande el filtro A(z)
puede tener muchos coeficientes y puede no haber ganancia!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage II
Se sabe que para el filtro H(z) se tiene
NH ≈D(δ1, δ2)
∆ω, ∆ω = ωp − ωs
Claramente G(z) tiene NG = NH/2 coeficientes y A(z) tiene NAcoeficientes que satisfacen NA << NH .
Esto quiere decir que la cascada G(z2)A(z) tiene aproximadamenteNH/2 coeficientes!!. Podemos reducir la cantidad de multiplicaciones
necesarias! (El numero de elementos de memoria necesariospermanece igual).
Esto se puede generalizar al caso en que la expansion se hace con unfactor M generico!! Sin embargo si M es muy grande el filtro A(z)
puede tener muchos coeficientes y puede no haber ganancia!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage II
Se sabe que para el filtro H(z) se tiene
NH ≈D(δ1, δ2)
∆ω, ∆ω = ωp − ωs
Claramente G(z) tiene NG = NH/2 coeficientes y A(z) tiene NAcoeficientes que satisfacen NA << NH .
Esto quiere decir que la cascada G(z2)A(z) tiene aproximadamenteNH/2 coeficientes!!. Podemos reducir la cantidad de multiplicaciones
necesarias! (El numero de elementos de memoria necesariospermanece igual).
Esto se puede generalizar al caso en que la expansion se hace con unfactor M generico!! Sin embargo si M es muy grande el filtro A(z)
puede tener muchos coeficientes y puede no haber ganancia!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage III
0 0.5 1 1.5 2 2.5 3−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
10
Frecuencia en radianes
Mag
nitu
d (d
B)
Diseño equirriple simpleDiseño multistage
1 2 3 4 5 6 7 8 9 1050
100
150
200
250
300
350
Núm
ero
tota
l de
mul
tiplic
ador
es
Factor de expansión
Ejemplo con
0,98 ≤ |H(ejω
)| ≤ 1,02 0 ≤ ω ≤ 0,08π
|H(ejω
)| ≤ 0,001 0,1π ≤ ω ≤ π
Con M = 4 obtenemos el mınimo numero decoeficientes (94) con una reduccion de mas del 60 %de los coeficientes con respecto al caso simple (315coeficientes.)!
Tener en cuenta que el sistema debe implementarse en forma practica comola cascada de los sistemas para aprovechar la ganancia en implementacion!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Disenos multistage III
0 0.5 1 1.5 2 2.5 3−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
0
10
Frecuencia en radianes
Mag
nitu
d (d
B)
Diseño equirriple simpleDiseño multistage
1 2 3 4 5 6 7 8 9 1050
100
150
200
250
300
350
Núm
ero
tota
l de
mul
tiplic
ador
es
Factor de expansión
Ejemplo con
0,98 ≤ |H(ejω
)| ≤ 1,02 0 ≤ ω ≤ 0,08π
|H(ejω
)| ≤ 0,001 0,1π ≤ ω ≤ π
Con M = 4 obtenemos el mınimo numero decoeficientes (94) con una reduccion de mas del 60 %de los coeficientes con respecto al caso simple (315coeficientes.)!
Tener en cuenta que el sistema debe implementarse en forma practica comola cascada de los sistemas para aprovechar la ganancia en implementacion!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores I
Muchas veces es necesario realizar la siguiente operacion:
y(n) = w(nM),
Y (ejω) =1
M
M−1∑k=0
W(ejω−2πM
)
Se ve entonces que la funcion H(z)es preparar la senal antes de ser
decimada para minimizar el efectodel aliasing!
Esta operacion es basica en todo sistema que necesite disminuir latasa de informacion que transmite una determinada senal!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores I
Muchas veces es necesario realizar la siguiente operacion:
y(n) = w(nM),
Y (ejω) =1
M
M−1∑k=0
W(ejω−2πM
) Se ve entonces que la funcion H(z)es preparar la senal antes de ser
decimada para minimizar el efectodel aliasing!
Esta operacion es basica en todo sistema que necesite disminuir latasa de informacion que transmite una determinada senal!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores I
Muchas veces es necesario realizar la siguiente operacion:
y(n) = w(nM),
Y (ejω) =1
M
M−1∑k=0
W(ejω−2πM
) Se ve entonces que la funcion H(z)es preparar la senal antes de ser
decimada para minimizar el efectodel aliasing!
Esta operacion es basica en todo sistema que necesite disminuir latasa de informacion que transmite una determinada senal!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores II
Muchas veces H(z) tiene una banda de transicion extremadamente estrechalo que implica muchos coeficientes (multiplicaciones). Sin embargo:
El decimador se queda con una de cada M muestras! Se puede realizar elfiltrado por H(z) en una de cada M unidades de tiempo.
En una unidad de tiempo por cada M nuestro procesador va a tener unpico de actividad y en el resto no tendra ninguna! Esto puede resultar en un
pobre aprovechamiento de los recursos!
Es posible compensar esto y redistribuir las multiplicaciones que H(z) deberealizar por cada muestra util durante las M unidades de tiempo.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores II
Muchas veces H(z) tiene una banda de transicion extremadamente estrechalo que implica muchos coeficientes (multiplicaciones). Sin embargo:
El decimador se queda con una de cada M muestras! Se puede realizar elfiltrado por H(z) en una de cada M unidades de tiempo.
En una unidad de tiempo por cada M nuestro procesador va a tener unpico de actividad y en el resto no tendra ninguna! Esto puede resultar en un
pobre aprovechamiento de los recursos!
Es posible compensar esto y redistribuir las multiplicaciones que H(z) deberealizar por cada muestra util durante las M unidades de tiempo.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores II
Muchas veces H(z) tiene una banda de transicion extremadamente estrechalo que implica muchos coeficientes (multiplicaciones). Sin embargo:
El decimador se queda con una de cada M muestras! Se puede realizar elfiltrado por H(z) en una de cada M unidades de tiempo.
En una unidad de tiempo por cada M nuestro procesador va a tener unpico de actividad y en el resto no tendra ninguna! Esto puede resultar en un
pobre aprovechamiento de los recursos!
Es posible compensar esto y redistribuir las multiplicaciones que H(z) deberealizar por cada muestra util durante las M unidades de tiempo.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores II
Muchas veces H(z) tiene una banda de transicion extremadamente estrechalo que implica muchos coeficientes (multiplicaciones). Sin embargo:
El decimador se queda con una de cada M muestras! Se puede realizar elfiltrado por H(z) en una de cada M unidades de tiempo.
En una unidad de tiempo por cada M nuestro procesador va a tener unpico de actividad y en el resto no tendra ninguna! Esto puede resultar en un
pobre aprovechamiento de los recursos!
Es posible compensar esto y redistribuir las multiplicaciones que H(z) deberealizar por cada muestra util durante las M unidades de tiempo.
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores III
Para realizar esto vamos a recurrir a la descomposicion polifasica de ordenM para cualquier H(z):
H(z) =
∞∑n=−∞
h(n)z−n
=∞∑
n=−∞
h(nM)z−nM + z−1∞∑
n=−∞
h(nM + 1)z−nM + . . .
+z−M+1∞∑
n=−∞
h(nM +M − 1)z−nM
= E0(zM ) + z−1E1(zM ) + · · ·+ z−M+1EM−1(zM )
Ei(z) =
∞∑n=−∞
h(nM + i)z−i,
i = 0, . . . ,M − 1
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores III
Para realizar esto vamos a recurrir a la descomposicion polifasica de ordenM para cualquier H(z):
H(z) =
∞∑n=−∞
h(n)z−n
=∞∑
n=−∞
h(nM)z−nM + z−1∞∑
n=−∞
h(nM + 1)z−nM + . . .
+z−M+1∞∑
n=−∞
h(nM +M − 1)z−nM
= E0(zM ) + z−1E1(zM ) + · · ·+ z−M+1EM−1(zM )
Ei(z) =
∞∑n=−∞
h(nM + i)z−i,
i = 0, . . . ,M − 1
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores III
Para realizar esto vamos a recurrir a la descomposicion polifasica de ordenM para cualquier H(z):
H(z) =
∞∑n=−∞
h(n)z−n
=∞∑
n=−∞
h(nM)z−nM + z−1∞∑
n=−∞
h(nM + 1)z−nM + . . .
+z−M+1∞∑
n=−∞
h(nM +M − 1)z−nM
= E0(zM ) + z−1E1(zM ) + · · ·+ z−M+1EM−1(zM )
Ei(z) =
∞∑n=−∞
h(nM + i)z−i,
i = 0, . . . ,M − 1
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores IV
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores IV
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores V
La estructura queda como
Cada uno de los Ei(z) tieneaproximadamente N/M
coeficientes donde N es el numerode coeficientes de H(z). Comocada Ei(z) opera a una tasa M
veces menor entonces el numero demultiplicaciones por unidad de
tiempo se reduce a N/M !!
Ahora el procesador realiza N/M multiplicaciones por unidad de tiempo enforma continua y la carga computacional se encuentra mejor balanceada!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores V
La estructura queda como
Cada uno de los Ei(z) tieneaproximadamente N/M
coeficientes donde N es el numerode coeficientes de H(z). Comocada Ei(z) opera a una tasa M
veces menor entonces el numero demultiplicaciones por unidad de
tiempo se reduce a N/M !!
Ahora el procesador realiza N/M multiplicaciones por unidad de tiempo enforma continua y la carga computacional se encuentra mejor balanceada!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores V
La estructura queda como
Cada uno de los Ei(z) tieneaproximadamente N/M
coeficientes donde N es el numerode coeficientes de H(z). Comocada Ei(z) opera a una tasa M
veces menor entonces el numero demultiplicaciones por unidad de
tiempo se reduce a N/M !!
Ahora el procesador realiza N/M multiplicaciones por unidad de tiempo enforma continua y la carga computacional se encuentra mejor balanceada!!
LPSC - Facultad de Ingenierıa Seminario de Sistemas Embebidos
Senales y sistemas en tiempo discretoFiltros en tiempo discreto
Diseno de filtros IIRDiseno de filtros FIR
Decimadores VI
Sea un el diseno de un decimador con factor M = 50. Las caracterısticas delfiltro H(z) cuya frecuencia de corte debe ser π/50 son: