51
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 1 CONTROL II Tema: ESTABILIDAD RELATIVA MARGEN DE GANANCIA MARGEN DE FASE Prof. Ing. Carlos F. Martín Año: 2009
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 1
CONTROL II Tema: ESTABILIDAD RELATIVA MARGEN DE GANANCIA MARGEN DE FASE Prof. Ing. Carlos F. Martín Año: 2009

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 2
Introducción Algunas de las preguntas importantes que pueden formularse con relación a la estabilidad y al funcionamiento en general de un sistema de control realimentado son:
1. Si el sistema es estable, cuan estable es. 2. Si el sistema no es lo suficientemente estable, o inestable, como
puede ser mejorada la condición de estabilidad. La primera pregunta es un problema de análisis, mientras que la segunda es de diseño. En general, estamos no solo en sistemas estables, sino también que tengan un cierto grado de estabilidad, o estabilidad relativa. En muchas situaciones se puede usar el máximo de resonancia, MR, o el coeficiente de amortiguamiento relativo,δ , del par de polos complejos dominantes del sistema, para indicar la estabilidad relativa de un sistema de control realimentado. Otra forma de medir la estabilidad relativa de un sistema es por medio del diagrama de Nyquist de la función de transferencia del lazo. La cercanía del lugar de L(jw) a el punto crítico, (-1, j0) nos da una indicación de cuan estable o inestable es el sistema bajo análisis. Para demostrar el concepto de estabilidad relativa, los gráficos de Nyquist y las correspondientes respuestas al escalón de entrada y frecuenciales de un sistema típico de tercer orden, se muestran en las figuras 1(a)-(d), para diferentes valores de la ganancia del lazo K.
-60-30
030
M(jw), Diagrama de Bode
100 102-270-180-90
0
0 10 200
0.5
1
1.5
( a )
Resp. al Escalón
-1.5 0 1.5-2
-1
0
1
Diag. de Nyquist
-3 -1.5 0 1.5-6
-4
-2
0
2
0 10 200
1
2
( b )
-60-30
030
100 102-270-180-90
0
(1)
(2) (1)
(2)
(1)
(2)
(2) (1)
jImL
ReL
jImL
ReL
ωg<ωc
Figuras 1(a) y (b)
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 3
-4 -2 0 2-6
-4
-2
0
2
Diag. de Nyquist
0 5 10 150
0.5
1
1.5
2Resp. al Escalón
( c )
-1000
100200M(jw), Diag. de Bode
100 102-90
090
180
-5 -2.5 0-5
-2.5
0
0 5 10 15-8
-4
0
4
8
( d )
-80
-40
0
100 102-90
090
180
jImL
ReL
K = KL
ωg=ωc
jImL
ReL
K > KL
ωc<ωg
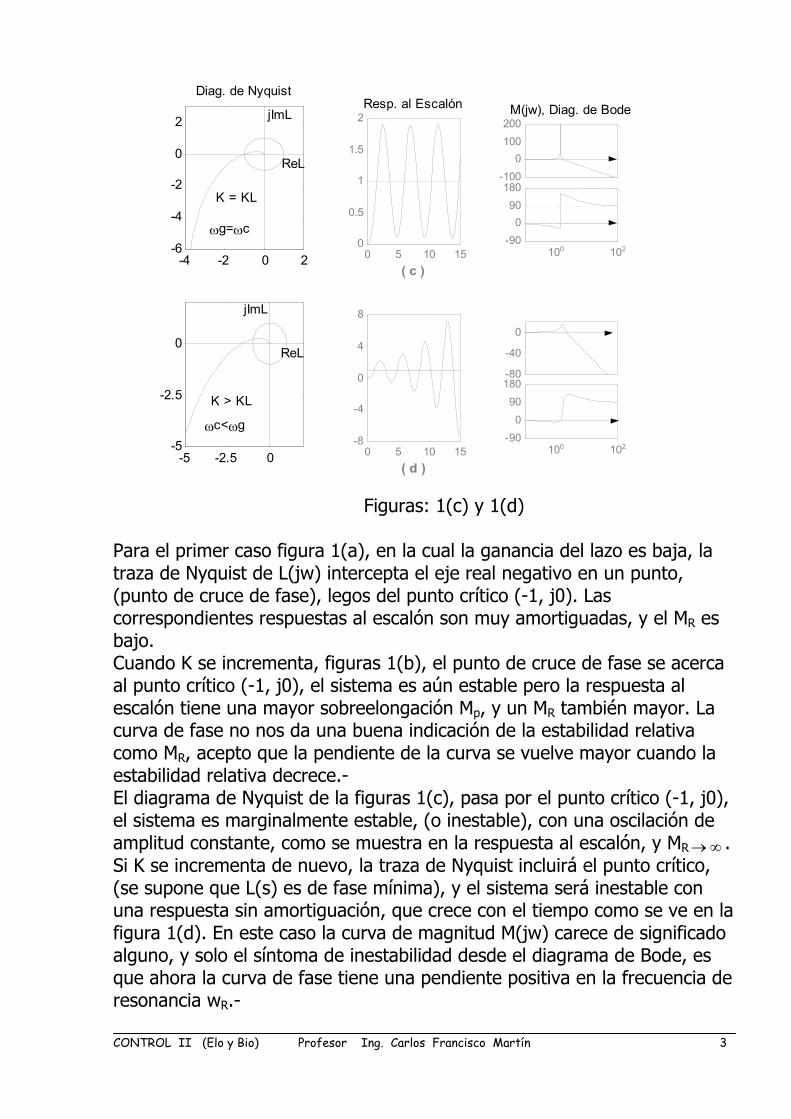
Figuras: 1(c) y 1(d) Para el primer caso figura 1(a), en la cual la ganancia del lazo es baja, la traza de Nyquist de L(jw) intercepta el eje real negativo en un punto, (punto de cruce de fase), legos del punto crítico (-1, j0). Las correspondientes respuestas al escalón son muy amortiguadas, y el MR es bajo. Cuando K se incrementa, figuras 1(b), el punto de cruce de fase se acerca al punto crítico (-1, j0), el sistema es aún estable pero la respuesta al escalón tiene una mayor sobreelongación Mp, y un MR también mayor. La curva de fase no nos da una buena indicación de la estabilidad relativa como MR, acepto que la pendiente de la curva se vuelve mayor cuando la estabilidad relativa decrece.- El diagrama de Nyquist de la figuras 1(c), pasa por el punto crítico (-1, j0), el sistema es marginalmente estable, (o inestable), con una oscilación de amplitud constante, como se muestra en la respuesta al escalón, y MR ∞→ . Si K se incrementa de nuevo, la traza de Nyquist incluirá el punto crítico, (se supone que L(s) es de fase mínima), y el sistema será inestable con una respuesta sin amortiguación, que crece con el tiempo como se ve en la figura 1(d). En este caso la curva de magnitud M(jw) carece de significado alguno, y solo el síntoma de inestabilidad desde el diagrama de Bode, es que ahora la curva de fase tiene una pendiente positiva en la frecuencia de resonancia wR.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 4
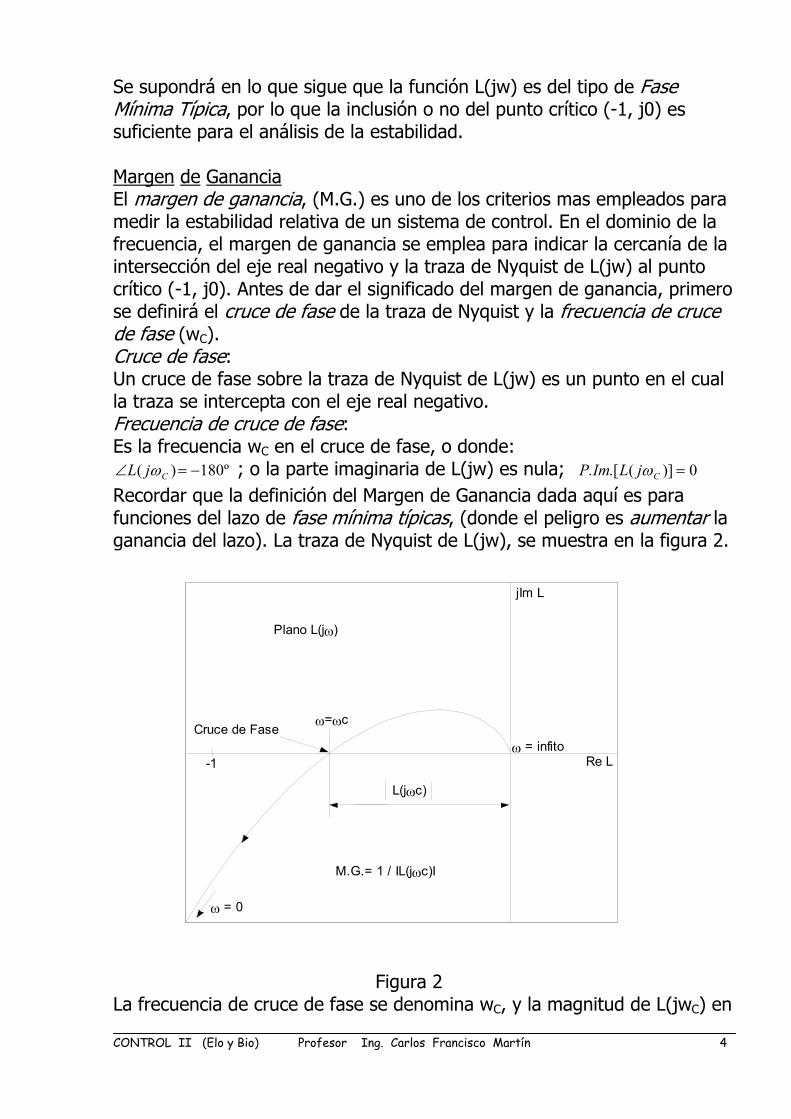
Se supondrá en lo que sigue que la función L(jw) es del tipo de Fase Mínima Típica, por lo que la inclusión o no del punto crítico (-1, j0) es suficiente para el análisis de la estabilidad. Margen de Ganancia El margen de ganancia, (M.G.) es uno de los criterios mas empleados para medir la estabilidad relativa de un sistema de control. En el dominio de la frecuencia, el margen de ganancia se emplea para indicar la cercanía de la intersección del eje real negativo y la traza de Nyquist de L(jw) al punto crítico (-1, j0). Antes de dar el significado del margen de ganancia, primero se definirá el cruce de fase de la traza de Nyquist y la frecuencia de cruce de fase (wC). Cruce de fase: Un cruce de fase sobre la traza de Nyquist de L(jw) es un punto en el cual la traza se intercepta con el eje real negativo. Frecuencia de cruce de fase: Es la frecuencia wC en el cruce de fase, o donde:
º180)( −=∠ CjL ω ; o la parte imaginaria de L(jw) es nula; 0)](.[ =CjLP.Im ω Recordar que la definición del Margen de Ganancia dada aquí es para funciones del lazo de fase mínima típicas, (donde el peligro es aumentar la ganancia del lazo). La traza de Nyquist de L(jw), se muestra en la figura 2.
ω = 0
ω = infito
jIm L
Re L
L(jωc)
ω=ωc Cruce de Fase
-1
Plano L(jω)
M.G.= 1 / IL(jωc)I
Figura 2 La frecuencia de cruce de fase se denomina wC, y la magnitud de L(jwC) en
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 5
w=wC se designa como el valor absoluto de )( CjL ω . Entonces el margen de ganancia del sistema, que tiene L(s) como la función de transferencia del lazo se define como:
)(1..CjL
GMω
=
Por lo tanto si el M.G. es mayor que la unidad, el sistema será estable. Si el M.G. es igual a la unidad, el sistema será marginalmente estable. Si el M.G. es menor que la unidad, el sistema será inestable. El M.G. también se puede expresar en decibeles:
)(1.,.CjL
log20dBGMω
= )(.,. CjLlog20dBGM ω−=⇒
Por lo tanto si el M.G. es mayor que cero, el sistema será estable. Si el M.G. es igual a cero, el sistema será marginalmente estable. Si el M.G. es menor que cero, el sistema será inestable. En base a esta definición, se pueden obtener las siguientes conclusiones acerca de M.G. de un sistema, dependiendo de las propiedades de la traza de Nyquist.
1. La traza de L(jw) no intercepta eje real negativo, (no hay un cruce de fase finito).-
dBdBGMjL C ∞=⇒= .,.0)( ω , sistema estable para todo K>0. 2. La traza de Nyquist de L(jw) intercepta eje real negativo entre 0 y el punto crítico (-1, j0): 0.,.1)(0 >⇒<< dBGMjL Cω ; Sistema estable. 3. La traza de Nyquist de L(jw) pasa a través del punto crítico (-1, j0): dBdBGMjL C 0.,.1)( =⇒=ω ; Sistema marginalmente estable. 4. La traza de Nyquist de L(jw) incluye al punto crítico (-1, j0), o sea el
cruce de fase está a su izquierda: dBdBGMjL C 0.,.1)( <⇒>ω ; Sistema inestable.
En base a la discusión anterior, el significado físico del M. G. se puede resumir como: “El Margen de Ganancia es la cantidad de ganancia en dB que se puede añadir al lazo del sistema antes de que el mismo se vuelva inestable”. Las siguientes conclusiones se pueden obtener de un sistema con la L(s) típica y de fase mínima.-
• Cuando la traza de Nyquist no intercepta al eje real negativo en una frecuencia no nula y finita, el margen de ganancia es infinito en dB, esto significa que teóricamente, el valor de la ganancia del lazo se puede incrementar al infinito antes de que el sistema se vuelva inestable.-

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 6
• Cuando la traza de Nyquist de L (jw) pasa a la derecha del punto crítico (-1, j0), el margen de ganancia es positivo en dB, y la ganancia del lazo se puede incrementar en la cantidad del margen de ganancia para que el sistema sea marginalmente estable.
• Cuando la traza de Nyquist pasa a través del punto crítico (-1, j0), el margen de ganancia es igual a 0 dB, lo que implica que la ganancia del lazo no podría crecer más, ya que el sistema es marginalmente estable.-
• Cuando el cruce de fase está a la izquierda del punto crítico (-1, j0), el margen de ganancia es negativo en dB, y la ganancia del lazo se debe reducir para que el sistema se vuelva marginalmente inestable, (pues es inestable).-
Ejemplo 1: Un sistema tiene:
0)1()2/1()3/1(
)( >+++
= KConsss
KsL
Se puede demostrar que el sistema es estable para K<5/3. Suponiendo que K=5/6. a) Determinar el M.G. en dB.- b) Determinar el valor de K para que el M.G. en dB sea 20dB.- a) Se puede determinarlo de las dos maneras siguientes:
1) dB6.0220log2dBGMdBeno2M.G.25/65/3
KK
M.G. Lím +==⇒=⇒=== .,.
2) srsiImPj
jL Cc /10)1(:0.)66()111(
5)( 222 =⇒=−=⇒
−+−= ωω
ωωωω
)(.,.50.01111
5)( CC jLlog20dBGMjL ωω −=⇒−=×−
=
Por lo tanto: dBdBGM 02.6.,. += b) Como M.G., dB=20, resulta que: M.G. = 10, por ende:
1) −=⇒===⇒=× .61
305
103/5
1010 .
. KK
KKK LímLím
2) Como )(log2020.,. CjLdBGM ω−== 10.0)(1)(log =⇒−= CC jLjL ωω
Como la frecuencia de cruce de fase wC no cambia con el valor de la ganancia K, wC = 1 rad/seg. Por lo tanto:
101
53
106
1116)( 2 ==
−=
−=
KKKjLC
C ωω
61
305
=⇒= KK .-
Por ende si K = 1/6, el margen de ganancia será el solicitado de 20 dB.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 7
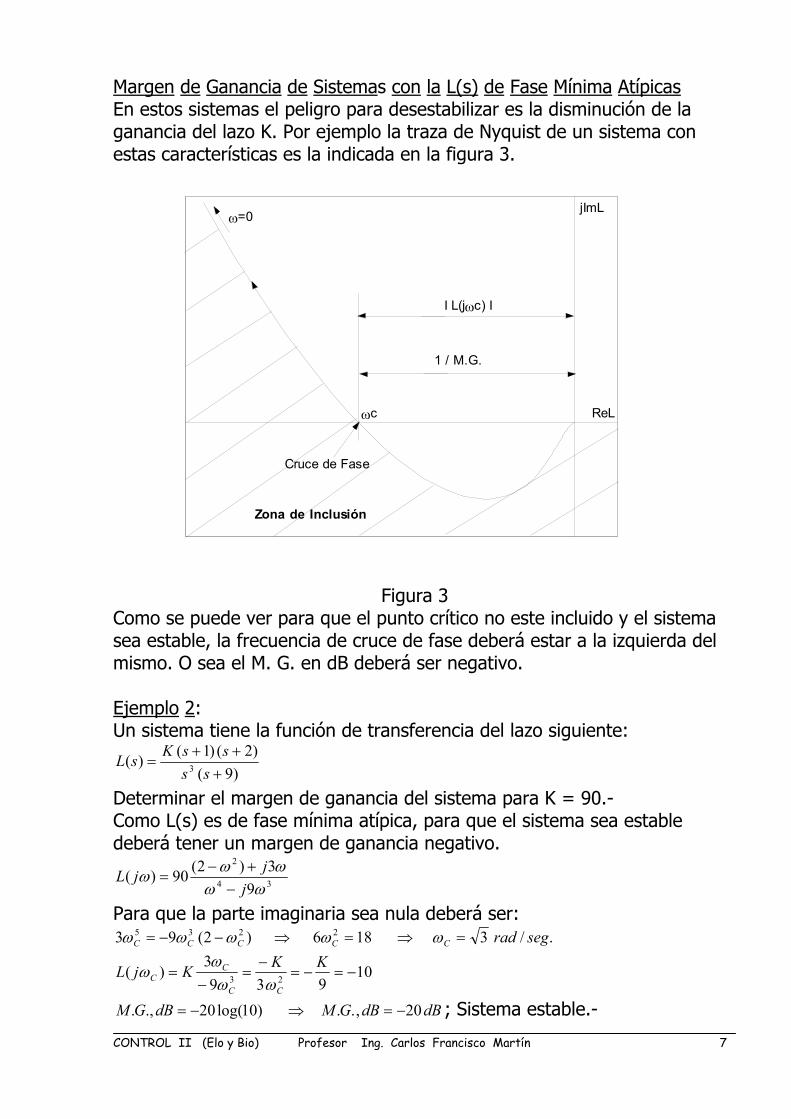
Margen de Ganancia de Sistemas con la L(s) de Fase Mínima Atípicas En estos sistemas el peligro para desestabilizar es la disminución de la ganancia del lazo K. Por ejemplo la traza de Nyquist de un sistema con estas características es la indicada en la figura 3.
jImL
ReL
ω=0
I L(jωc) I
1 / M.G.
ωc
Cruce de Fase
Zona de Inclusión
Figura 3 Como se puede ver para que el punto crítico no este incluido y el sistema sea estable, la frecuencia de cruce de fase deberá estar a la izquierda del mismo. O sea el M. G. en dB deberá ser negativo. Ejemplo 2: Un sistema tiene la función de transferencia del lazo siguiente:
)9()2()1()( 3 +
++=
ssssKsL
Determinar el margen de ganancia del sistema para K = 90.- Como L(s) es de fase mínima atípica, para que el sistema sea estable deberá tener un margen de ganancia negativo.
34
2
93)2(90)(
ωωωωω
jjjL
−+−
=
Para que la parte imaginaria sea nula deberá ser: ./3186)2(93 2235 segradCCCCC =⇒=⇒−−= ωωωωω
10939
3)( 23 −=−=
−=
−=
KKKjLCC
CC ωω
ωω
dBdBGMdBGM 20,..)10log(20.,. −=⇒−= ; Sistema estable.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 8
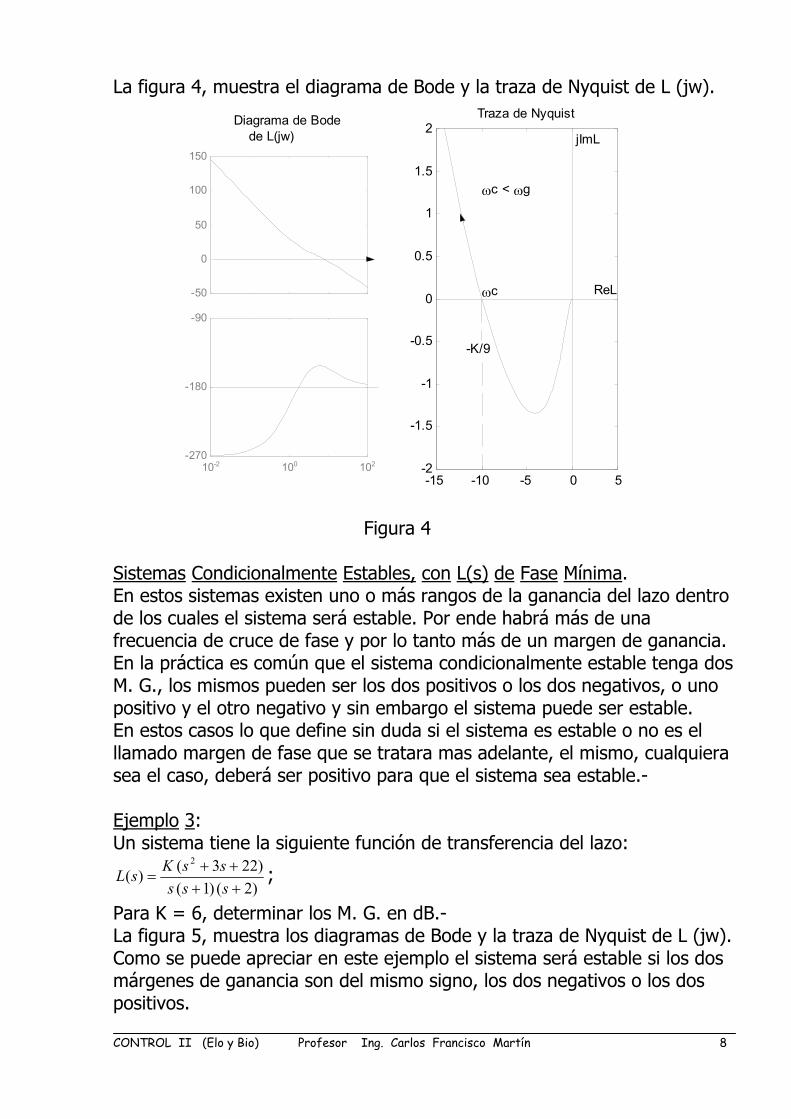
La figura 4, muestra el diagrama de Bode y la traza de Nyquist de L (jw).
Diagrama de Bodede L(jw)
-50
0
50
100
150
10-2 100 102-270
-180
-90
-15 -10 -5 0 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Traza de Nyquist
jImL
ReL ωc
-K/9
ωc < ωg
Figura 4 Sistemas Condicionalmente Estables, con L(s) de Fase Mínima. En estos sistemas existen uno o más rangos de la ganancia del lazo dentro de los cuales el sistema será estable. Por ende habrá más de una frecuencia de cruce de fase y por lo tanto más de un margen de ganancia. En la práctica es común que el sistema condicionalmente estable tenga dos M. G., los mismos pueden ser los dos positivos o los dos negativos, o uno positivo y el otro negativo y sin embargo el sistema puede ser estable. En estos casos lo que define sin duda si el sistema es estable o no es el llamado margen de fase que se tratara mas adelante, el mismo, cualquiera sea el caso, deberá ser positivo para que el sistema sea estable.- Ejemplo 3: Un sistema tiene la siguiente función de transferencia del lazo:
)2()1()223()(
2
++++
=sssssKsL ;
Para K = 6, determinar los M. G. en dB.- La figura 5, muestra los diagramas de Bode y la traza de Nyquist de L (jw). Como se puede apreciar en este ejemplo el sistema será estable si los dos márgenes de ganancia son del mismo signo, los dos negativos o los dos positivos.

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 9
Diagrama de Bode
-40
0
40
80
10-2 100 102-225
-180
-135
-90
-15 -10 -5 0 5-1
-0.5
0
0.5Traza de Nyquist
ωc1 ωc2
-1.5K
-9
-K/3
jImL
ReL
Figura 5 Procediendo como se sabe, las dos frecuencias de cruce de fase son:
−== ./2./11 21 segradysegrad CC ωω 3/25.1)( 2.2 =⇒−= LímC KKjL ω
−=⇒−= .33
)( 1.1 LímC KKjL ω
Como se aprecia para K = 6, el sistema será estable con los dos M. G. en dB negativos, a saber:
dBdBGMKK
GM Lím 085.19,..91
63/2.. 1
1.1 −=⇒===
dBdBGMK
KGM Lím 0205.6,..
21
63.. 2
2.2 −=⇒===
Si se disminuyen cualquiera de esos dos valores a los dB que hay el sistema será marginalmente estable.- Ejemplo 4: Un sistema tiene la siguiente función de transferencia del lazo:
)4014()5.0()( 23
2
++++
=sssssKsL ;
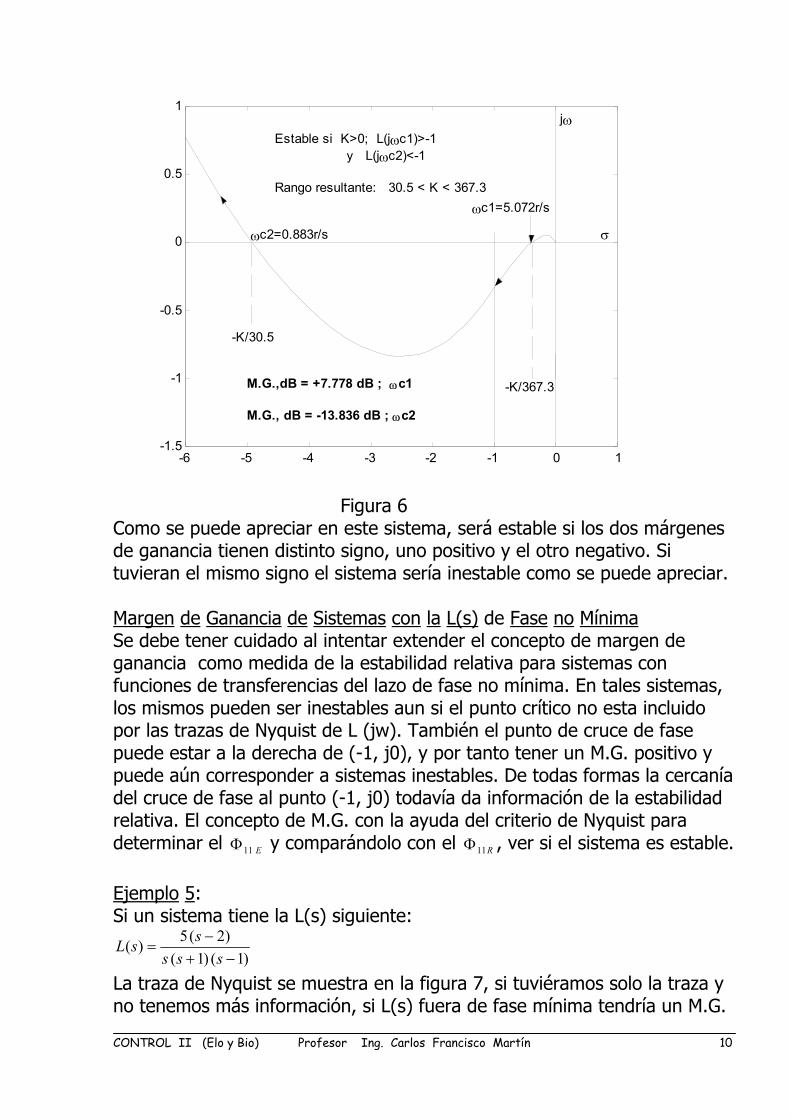
Para K = 150, determinar los M. G. en dB.- La figura 6, muestra la traza de Nyquist de L (jw).
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 10
-6 -5 -4 -3 -2 -1 0 1-1.5
-1
-0.5
0
0.5
1
ωc2=0.883r/s
ωc1=5.072r/s
-K/30.5
-K/367.3
jω
σ
Estable si K>0; L(jωc1)>-1 y L(jωc2)<-1 Rango resultante: 30.5 < K < 367.3
M.G.,dB = +7.778 dB ; ωc1 M.G., dB = -13.836 dB ; ωc2
Figura 6 Como se puede apreciar en este sistema, será estable si los dos márgenes de ganancia tienen distinto signo, uno positivo y el otro negativo. Si tuvieran el mismo signo el sistema sería inestable como se puede apreciar. Margen de Ganancia de Sistemas con la L(s) de Fase no Mínima Se debe tener cuidado al intentar extender el concepto de margen de ganancia como medida de la estabilidad relativa para sistemas con funciones de transferencias del lazo de fase no mínima. En tales sistemas, los mismos pueden ser inestables aun si el punto crítico no esta incluido por las trazas de Nyquist de L (jw). También el punto de cruce de fase puede estar a la derecha de (-1, j0), y por tanto tener un M.G. positivo y puede aún corresponder a sistemas inestables. De todas formas la cercanía del cruce de fase al punto (-1, j0) todavía da información de la estabilidad relativa. El concepto de M.G. con la ayuda del criterio de Nyquist para determinar el E11Φ y comparándolo con el R11Φ , ver si el sistema es estable. Ejemplo 5: Si un sistema tiene la L(s) siguiente:
)1()1()2(5)(−+
−=
sssssL
La traza de Nyquist se muestra en la figura 7, si tuviéramos solo la traza y no tenemos más información, si L(s) fuera de fase mínima tendría un M.G.
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 11
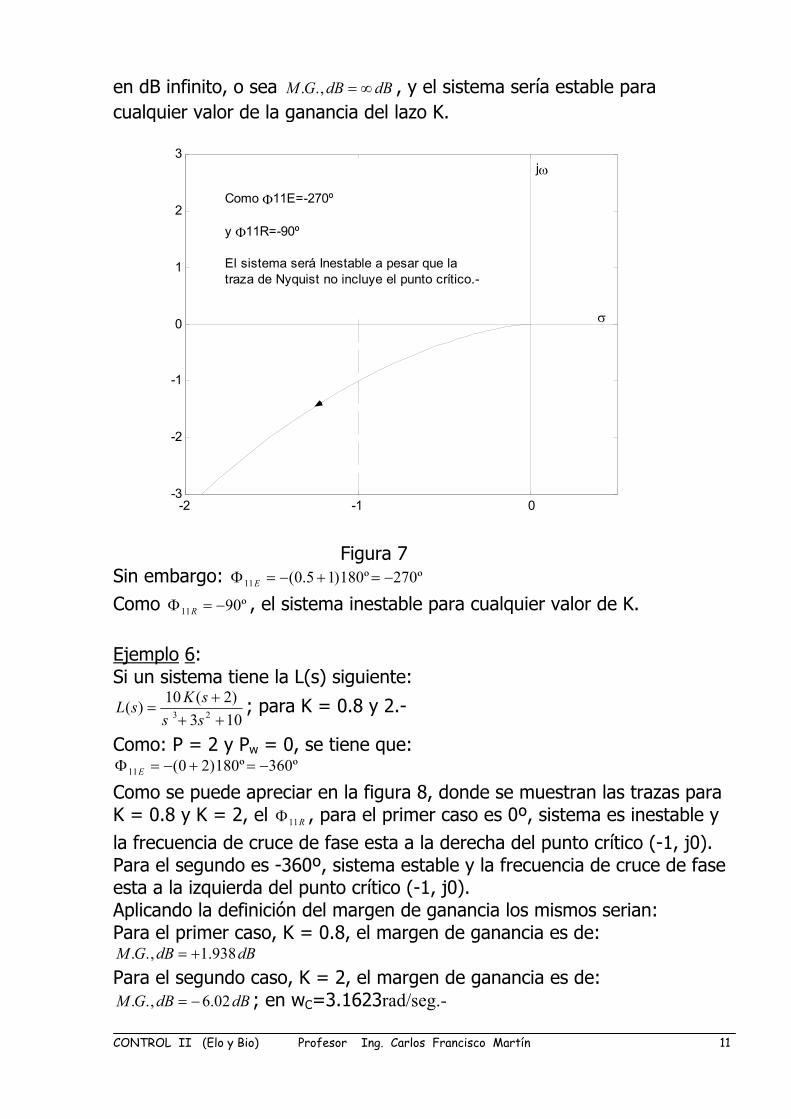
en dB infinito, o sea dBdBGM ∞=,.. , y el sistema sería estable para cualquier valor de la ganancia del lazo K.
-2 -1 0-3
-2
-1
0
1
2
3jω
σ
Como Φ11E=-270º y Φ11R=-90º El sistema será Inestable a pesar que la traza de Nyquist no incluye el punto crítico.-
Figura 7 Sin embargo: º270º180)15.0(11 −=+−=Φ E Como º9011 −=Φ R , el sistema inestable para cualquier valor de K. Ejemplo 6: Si un sistema tiene la L(s) siguiente:
103)2(10)( 23 ++
+=
sssKsL ; para K = 0.8 y 2.-
Como: P = 2 y Pw = 0, se tiene que: º360º180)20(11 −=+−=Φ E
Como se puede apreciar en la figura 8, donde se muestran las trazas para K = 0.8 y K = 2, el R11Φ , para el primer caso es 0º, sistema es inestable y la frecuencia de cruce de fase esta a la derecha del punto crítico (-1, j0). Para el segundo es -360º, sistema estable y la frecuencia de cruce de fase esta a la izquierda del punto crítico (-1, j0). Aplicando la definición del margen de ganancia los mismos serian: Para el primer caso, K = 0.8, el margen de ganancia es de:
dBdBGM 938.1,.. += Para el segundo caso, K = 2, el margen de ganancia es de:
dBdBGM 02.6,.. −= ; en wC=3.1623rad/seg.-
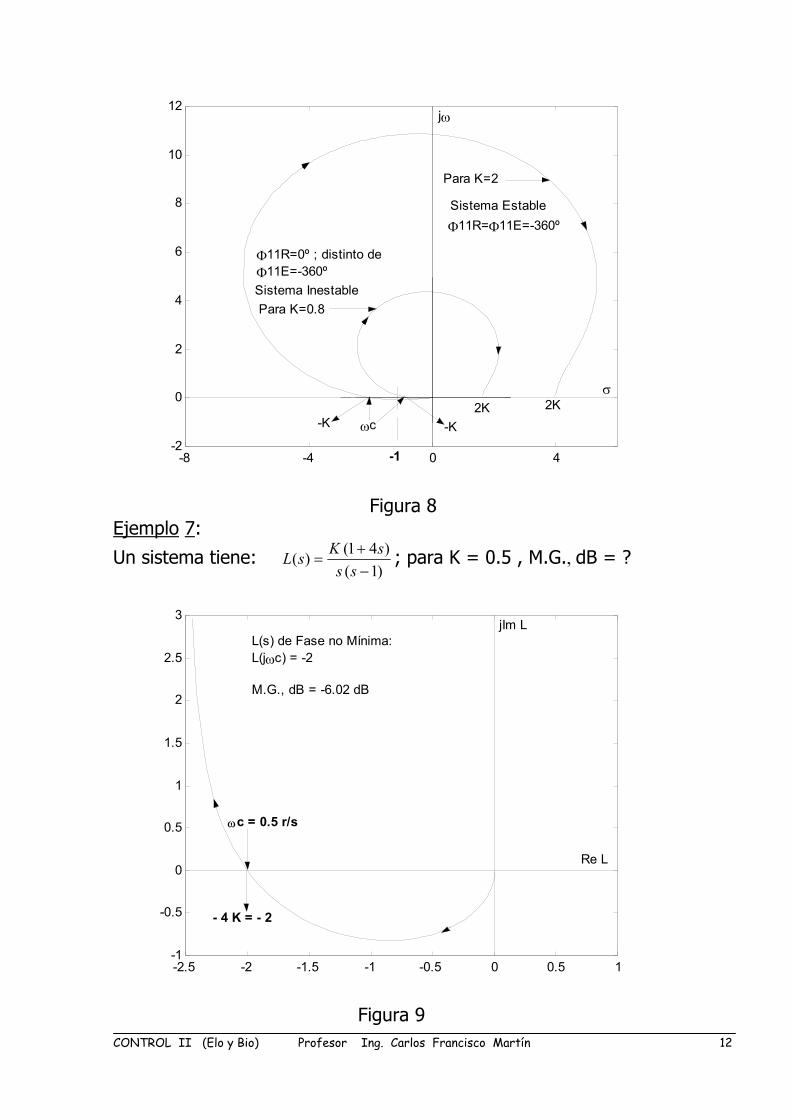
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 12
-8 -4 0 4-2
0
2
4
6
8
10
12jω
σ 2K 2K
-1
Para K=2
Para K=0.8
ωc
Sistema Estable
Sistema Inestable
-K -K
Φ11R=Φ11E=-360º
Φ11R=0º ; distinto deΦ11E=-360º
Figura 8 Ejemplo 7:
Un sistema tiene: )1()41()(
−+
=ss
sKsL ; para K = 0.5 , M.G., dB = ?
-2.5 -2 -1.5 -1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
1.5
2
2.5
3jIm L
Re L
ωc = 0.5 r/s
- 4 K = - 2
L(s) de Fase no Mínima:L(jωc) = -2 M.G., dB = -6.02 dB
Figura 9
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 13
La traza de Nyquist para K = 0.5, se indica en la figura 9. RE 1111 º270º180)15.0( Φ≡−=+−=Φ , por lo tanto el sistema es estable y el
margen de ganancia es: dBdBGMKK
GM Lím 02.6.,.5.050.025.0.. −=⇒===
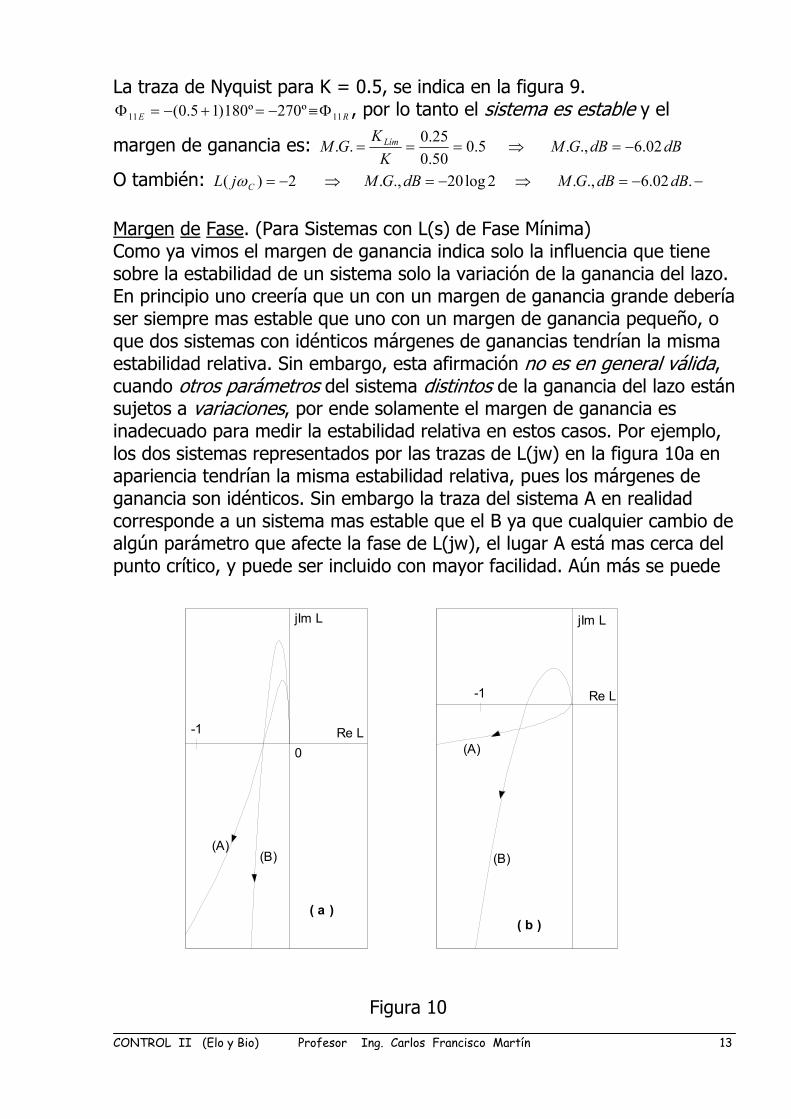
O también: −−=⇒−=⇒−= .02.6.,.2log20.,.2)( dBdBGMdBGMjL Cω Margen de Fase. (Para Sistemas con L(s) de Fase Mínima) Como ya vimos el margen de ganancia indica solo la influencia que tiene sobre la estabilidad de un sistema solo la variación de la ganancia del lazo. En principio uno creería que un con un margen de ganancia grande debería ser siempre mas estable que uno con un margen de ganancia pequeño, o que dos sistemas con idénticos márgenes de ganancias tendrían la misma estabilidad relativa. Sin embargo, esta afirmación no es en general válida, cuando otros parámetros del sistema distintos de la ganancia del lazo están sujetos a variaciones, por ende solamente el margen de ganancia es inadecuado para medir la estabilidad relativa en estos casos. Por ejemplo, los dos sistemas representados por las trazas de L(jw) en la figura 10a en apariencia tendrían la misma estabilidad relativa, pues los márgenes de ganancia son idénticos. Sin embargo la traza del sistema A en realidad corresponde a un sistema mas estable que el B ya que cualquier cambio de algún parámetro que afecte la fase de L(jw), el lugar A está mas cerca del punto crítico, y puede ser incluido con mayor facilidad. Aún más se puede
jIm L
Re L -1
(A)
(B)
( b )
jIm L
Re L 0
-1
(A) (B)
( a )
Figura 10
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 14
Demostrar que el sistema A en realidad tiene un MR más grande que el sistema B. En la figura 10b, el sistema B tiene un margen de ganancia menor que el sistema A y sin embargo el sistema B, por las razones ya comentadas seria mas estable que el A. Para tener en cuenta el efecto del corrimiento de la fase sobre la estabilidad elativa, (atrasos debidos a la variación de otros parámetros distintos que la ganancia del lazo), se introduce el concepto de, Margen de Fase, (M.F.), el mismo requiere que se den primero las siguientes definiciones: Cruce de Ganancia: El cruce de ganancia es un punto sobre la traza L (jw) en el cual la magnitud de L(jw) es igual a la unidad. Generalmente para los sistemas estables con la L(s) de fase mínima, este punto esta en el 3º o 4º cuadrante del plano de Nyquist. Frecuencia del Cruce de Ganancia: La frecuencia del cruce de ganancia, gϖ , es la frecuencia de L (jw) en el cruce de ganancia, o donde: 1)( =gjL ω
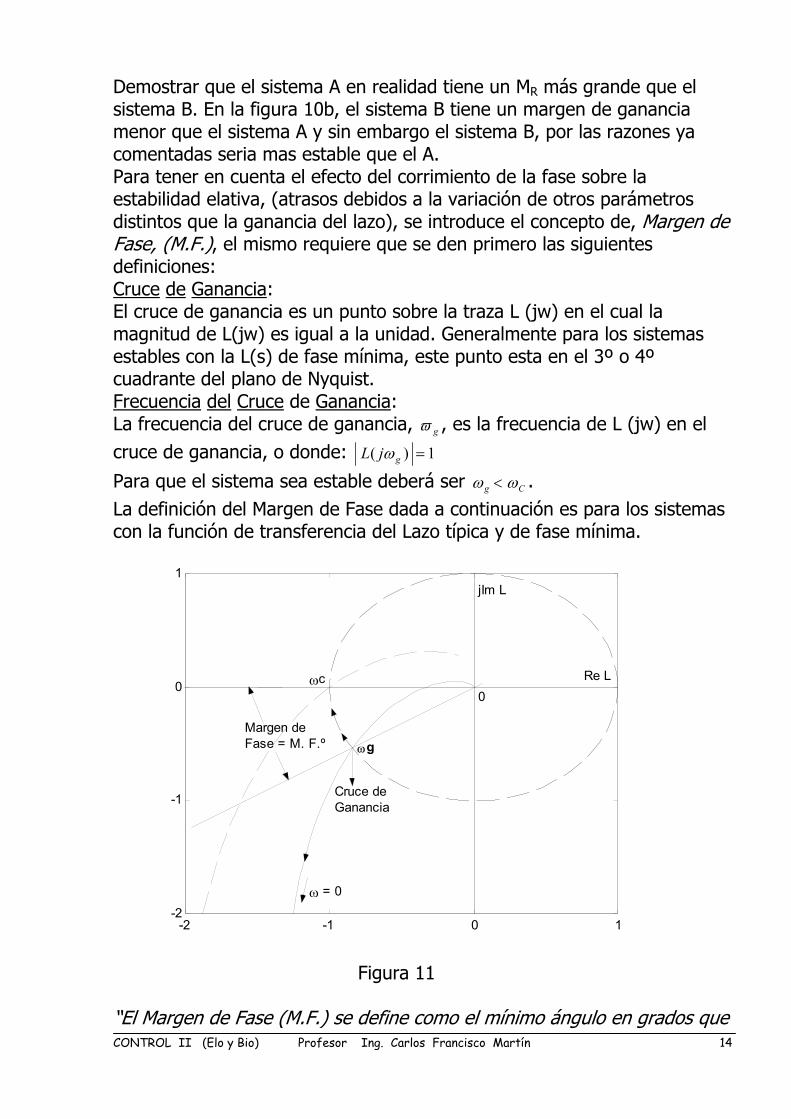
Para que el sistema sea estable deberá ser Cg ωω < . La definición del Margen de Fase dada a continuación es para los sistemas con la función de transferencia del Lazo típica y de fase mínima.
-2 -1 0 1-2
-1
0
1
ωg
Cruce de Ganancia
0
jIm L
Re L ωc
Margen de Fase = M. F.º
ω = 0
Figura 11 “El Margen de Fase (M.F.) se define como el mínimo ángulo en grados que
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 15
la traza L (jw) se debe rotar alrededor del origen, para que el cruce de ganancia pase por el punto critico (-1, j0)”. Si la rotación es horaria el M.F. es positivo y el sistema es estable, admite un atraso. Si la misma es en sentido antihorario el M.F. será negativo y el sistema es inestable. La figura 11, muestra la traza de Nyquist de una L (jw) típica de fase mínima. El margen de fase se indica como el ángulo entre la línea que partiendo del origen del plano L (jw) pasa por el punto del cruce de ganancia, y el eje real negativo del mismo plano. En contraste al M.G., el cual da una medida de los efectos de la ganancia del lazo sobre la estabilidad relativa del sistema, el M.F. indica el efecto sobre la estabilidad, debido a cambios en los parámetros del sistema que teóricamente alteran la fase de L (jw) en una cantidad igual para todas las frecuencias. También se puede decir que: El margen de fase es la cantidad de retardo puro que se puede añadir al lazo, (de un sistema estable), antes de que el mismo se vuelva inestable. Cuando el sistema tiene una L(s) de fase mínima, la expresión analítica del margen de fase, como se observa en la figura 11, se puede expresar como:
º180)()º(..0)( −∠=⇒>∠ gg jLFMjLSi ωω )(º180)º(..0)( gg jLFMjLSi ωω ∠+=⇒<∠
En donde gω es la frecuencia del cruce de ganancia.- Para los sistemas con L(s) de fase mínima, (tanto típicas, atípicas o condicionalmente inestables), si son estables el cruce de fase ocurre generalmente en el 3º cuadrante, (eventualmente el 4º), y por ende el M.F. será siempre positivo, (o sea todavía admite un retardo). Si estos sistemas son inestables este cruce ocurre generalmente en el 2º cuadrante, (eventualmente en el 1º), y por ende el M.F. será siempre negativo. Se pueden sacar las siguientes conclusiones para los M.G. y M.F.:
• Para un sistema con la L(s) típica y de fase mínima, para que el mismo sea estable deberán ser: M.G., dB y M.F. (º), positivos.
• Para un sistema con la L(s) atípica y de fase mínima, para que el mismo sea estable deberán ser: M.G., dB < 0 y M.F. (º) >0.
• Para un sistema con la L(s) condicionalmente estable, para que el mismo sea estable deberá ser el M.F. (º), positivo.
Nota: En una L(s) con el parámetro variable, la ganancia del lazo K, una vez fijado el valor de la misma, se puede determinar el M.G. con la L(s) real, o en una L(s) equivalente, L equiv.(s), si el parámetro que varía es distinto de la ganancia del lazo K.

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 16
En cambio el Margen de Fase resultante, fijado el valor del parámetro variable, sea cualquiera, solo se deberá determinar con la L(s) real.- Margen de Fase de Sistemas con la L(s) de Fase no Mínima Se debe tener cuidado si se interpreta el M.F. desde la traza de Nyquist de una función de transferencia del lazo de fase no mínima. En estos casos, el cruce de ganancia puede ocurrir en cualquier cuadrante del plano L(jw) y el sistema ser estable o inestable, según sea:
ER 1111 Φ=Φ o ER 1111 Φ≠Φ respectivamente. Por ejemplo en los ejemplos, 5, 6 y 7:
• Para el ejemplo 5: El sistema es inestable y si se aplica el concepto de M.F. el mismo daría positivo.
• Para el ejemplo 6: Para K=2, el sistema es estable y si se aplica el concepto de M.F. el mismo también daría positivo.
• Para el ejemplo 7: El sistema es estable y si se aplica el concepto de M.F. el mismo daría positivo.
El margen de fase al igual que el M.G. puede determinarse en forma analítica. Ejemplo 8:
Un sistema tiene: )2(
)(+
=ssKsL ; para K=1.5 determinar :
1. El Margen de Ganancia del sistema. 2. El Margen de fase del sistema 3. El tiempo de retardo máximo permitido, .MáxTd .-
1º) Por tratarse de un sistema típico de segundo orden,: dBdBGMjL gg ∞+=⇒=⇒∞→ ,..0)( ωω
2º) Primero se determinara la frecuencia de cruce de ganancia:
1ω4ω
1.5)jω(2jω
1.5jL2gggg
g =+
=+
=)( ω 0=−+⇒ 1.5ω4 2ggω ; operando:
02.25ω4 2gg =−+4ω ; si xx gg =⇒= ωω 2
./707.050.050.05.4025.24 212 segradxyxxx g ≅=⇒+=−=⇒=−+ ω
Por lo tanto: º47.109)(º47.109)º47.19º90()2/º90()( 1 −=∠⇒−=+−=+−=∠ −
ggg jLtagjL ωωω Por ende el M. F. será: M.F.º=180º-109.47º º53.70º.. +=⇒ FM 3º) El tiempo de retardo máximo permitido es entonces:
.741.1.741.1180707.0
º53.70º180//ºº..
.. segTdsegsrradFMTd MÁX
gMÁX =⇒=
××
=×
×=
πω
π
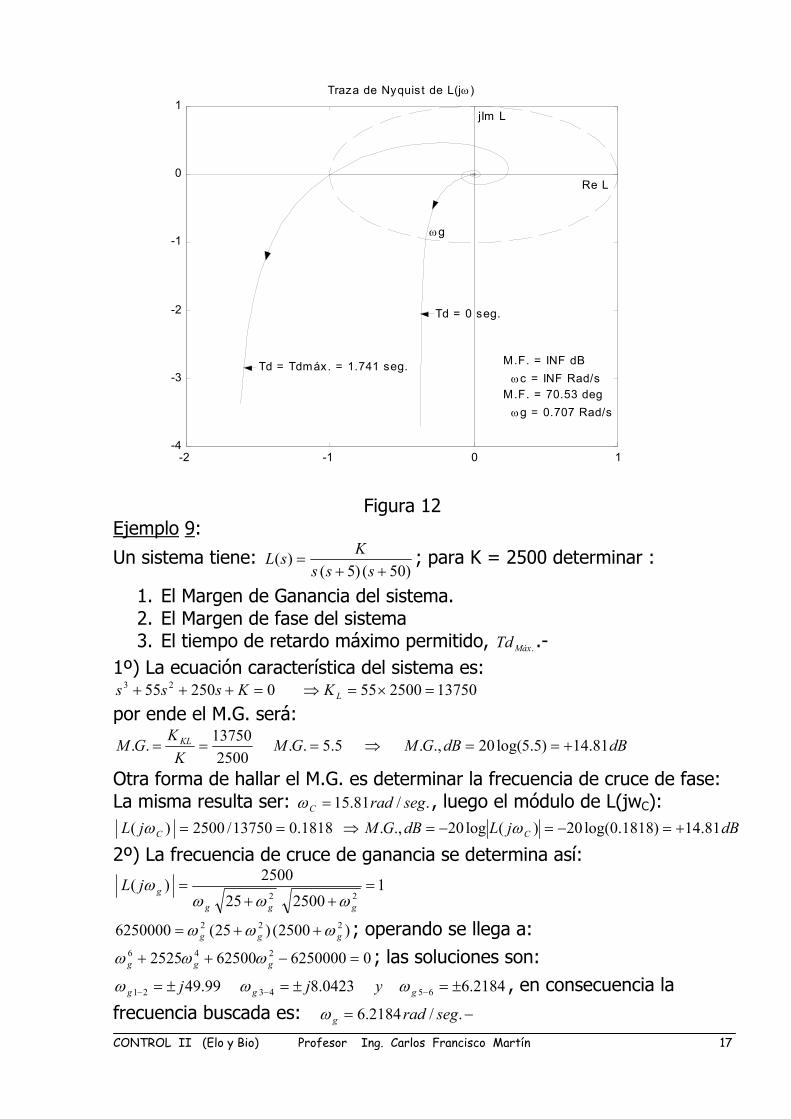
La figura 12 muestra la traza de Nyquist de L(jw), con Td=0 y Td=TdMÁX.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 17
-2 -1 0 1-4
-3
-2
-1
0
1
M.F. = INF dBωc = INF Rad/s
M.F. = 70.53 degωg = 0.707 Rad/s
Traza de Nyquist de L(jω)
Td = 0 seg.
Td = Tdmáx. = 1.741 seg.
Re L
jIm L
ωg
Figura 12 Ejemplo 9:
Un sistema tiene: )50()5(
)(++
=sss
KsL ; para K = 2500 determinar :
1. El Margen de Ganancia del sistema. 2. El Margen de fase del sistema 3. El tiempo de retardo máximo permitido, .MáxTd .-
1º) La ecuación característica del sistema es: 13750250055025055 23 =×=⇒=+++ LKKsss
por ende el M.G. será:
dBdBGMGMKK
GM KL 81.14)5.5log(20.,.5.5..2500
13750.. +==⇒===
Otra forma de hallar el M.G. es determinar la frecuencia de cruce de fase: La misma resulta ser: ./81.15 segradC =ω , luego el módulo de L(jwC):
dBjLdBGMjL CC 81.14)1818.0log(20)(log20.,.1818.013750/2500)( +=−=−=⇒== ωω
2º) La frecuencia de cruce de ganancia se determina así:
1250025
2500)(22=
++=
ggg
gjLωωω
ω
)2500()25(6250000 222ggg ωωω ++= ; operando se llega a:
06250000625002525 246 =−++ ggg ωωω ; las soluciones son: 2184.60423.899.49 654321 ±=±=±= −−− ggg yjj ωωω , en consecuencia la
frecuencia buscada es: −= ./2184.6 segradgω
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 18
La fase de L(jw) será: º3.148)50/5/º90()( 11 −=++−=∠ −−
ggg tagtagjL ωωω Otra forma de hallar la fase de L(jw) es:
)250(552500)( 22 ωωω
ω−+−
=j
jL ; por lo tanto:
862.2127358.1314
55250
)( 12
1
−−=
−
−−=∠ −− tagtagjL
g
gg ω
ωω , llamando:
862.2127358.13141−= tagα , será:
º28.148)180()( −=−−=∠ αω gjL , en consecuencia: )(º180º.. gjLFM ω+∠= M.F.= 31.72º.-
3º) El Tdmáx, será: −=⇒××
= .0889.01802184.6
º72.31.. segTdTd máxmáx
π
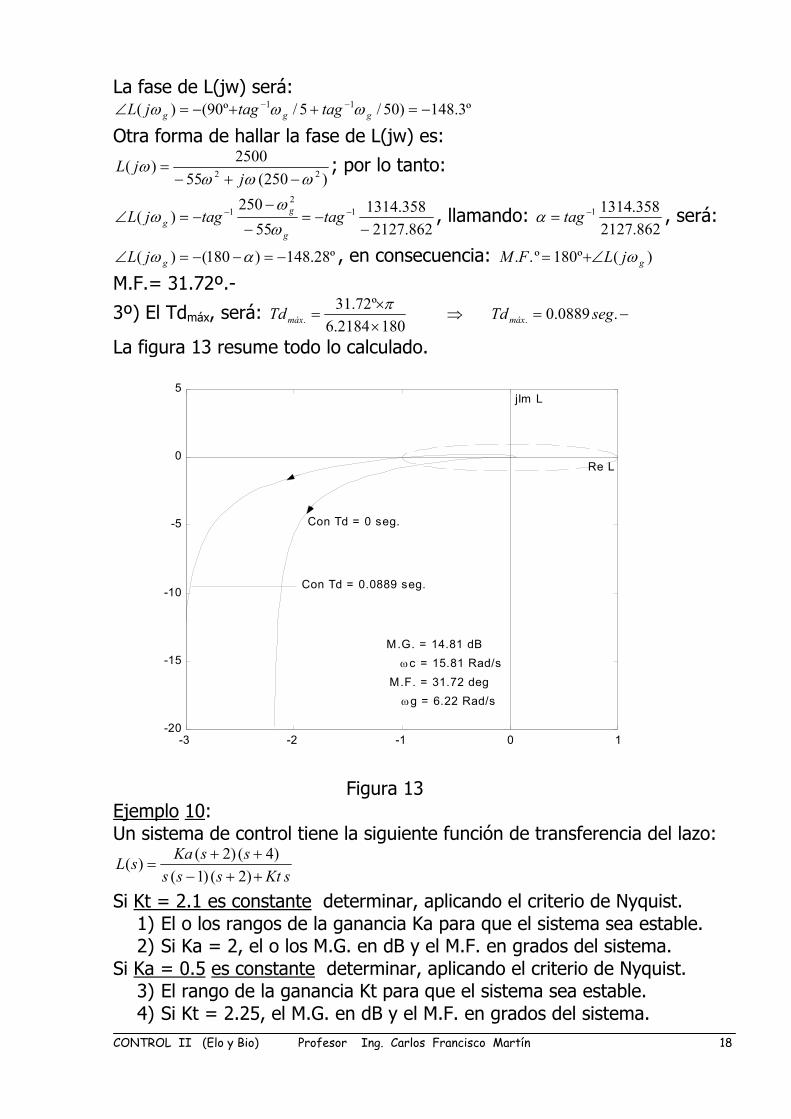
La figura 13 resume todo lo calculado.
-3 -2 -1 0 1-20
-15
-10
-5
0
5
M.G. = 14.81 dBωc = 15.81 Rad/s
M.F. = 31.72 degωg = 6.22 Rad/s
jIm L
Re L
Con Td = 0 seg.
Con Td = 0.0889 seg.
Figura 13 Ejemplo 10: Un sistema de control tiene la siguiente función de transferencia del lazo:
sKtsssssKasL++−++
=)2()1(
)4()2()(
Si Kt = 2.1 es constante determinar, aplicando el criterio de Nyquist. 1) El o los rangos de la ganancia Ka para que el sistema sea estable. 2) Si Ka = 2, el o los M.G. en dB y el M.F. en grados del sistema.
Si Ka = 0.5 es constante determinar, aplicando el criterio de Nyquist. 3) El rango de la ganancia Kt para que el sistema sea estable. 4) Si Kt = 2.25, el M.G. en dB y el M.F. en grados del sistema.

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 19
1) Si Kt = 2.1 constante, con Ka variable, nos queda la siguiente L(s):
)1.0()4()2()( 2 ++
++=
sssssKasL ; el diagrama de Nyquist es el indicado en la figura 14.
-30 -25 -20 -15 -10 -5 0 5-2
-1.5
-1
-0.5
0
0.5jIm L
Re L ωc1 ωc2
-4Ka -15Ka
Rangos de Estabilidad: 0 < Ka < 1/15 1/4 < Ka < infinito
El Sistem a es Condiciona lm ente Estable
Figura 14 Como Pw = 1 y P = 0, º9011 −=Φ E , por lo tanto el sistema será estable si Ka>0 y si: 1)( 2 −>CjL ω , o 1)( 1 −<CjL ω , así el punto critico no estará incluido por la traza de Nyquist, pues L(s) es de fase mínima.
)1.0()(6)8()( 22
2
ωωωωωω−+−
+−=
jjKajL ; la parte imaginaria sea nula si:
322 6)1.0()8( CCCC ωωωω −=−− ⇒ 08.01.2 24 =+− CC ωω las soluciones reales son: ./6.11 segradC =ω y ./50.02 segradC =ω
1158
)( 22
22
2 −>−=−
−= KaKajL
C
CC ω
ωω ⇒ 15/1<Ka
148
)( 21
21
1 −>−=−
−= KaKajL
C
CC ω
ωω ⇒ 4/1>Ka
Por lo tanto los rangos pedidos son: 0 < Ka < 1/15 y ¼ < Ka < infinito 2) Para Kt = 2.1, si se fija Ka, (el parámetro variable), en Ka = 2:
30)( 2 −=CjL ω y 8)( 1 −=CjL ω ; en consecuencia los M.G. pedidos serán: M.G.1 ,dB = -20 log 8 = -18.06 dB M.G.2 ,dB = -20 log 30 = -29.54 dB
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 20
El margen de fase será:
1)1.0(
42)(
2=
+−
++=
ggg
ggg j
jjKajL
ωωω
ωωω ; para Ka = 2, operando se llega a:
0256805/16 246 =−−− ggg ωωω ; las soluciones son: 4365.321 ±=−gω 1167.2419.043 jg ±−=−ω y 1167.2419.065 jg ±+=−ω
En consecuencia la frecuencia de cruce de ganancia es la solución real y positiva: ./4365.3 segradg =ω La fase de la L(jwg) será:
))1.0/(º90()4/()2/(()( 2111ggggg tagtagtagjL ωωωωω −+−+=∠ −−−
º177.153)( −=∠ gjL ω ; por lo tanto el M.F. pedido es: −−= º.177.153º1890..FM ⇒ M.F., (º) = 26.823º
3) Si Ka = 0.50 constante, con Kt variable nos queda:
sKtssssssL++−++
=)2()1(
)4()2(5.0)( ;
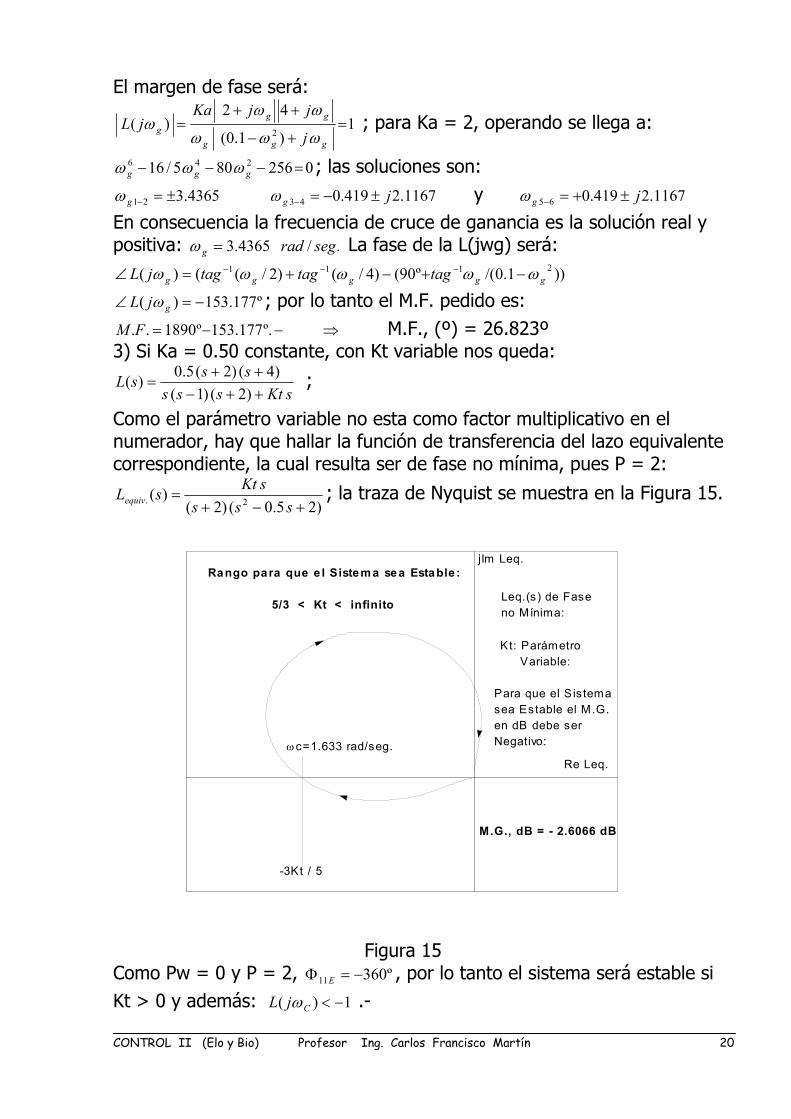
Como el parámetro variable no esta como factor multiplicativo en el numerador, hay que hallar la función de transferencia del lazo equivalente correspondiente, la cual resulta ser de fase no mínima, pues P = 2:
)25.0()2()( 2. +−+=
ssssKtsLequiv ; la traza de Nyquist se muestra en la Figura 15.
jIm Leq.
Re Leq. ωc=1.633 rad/seg.
-3Kt / 5
Rango para que e l Sistem a sea Estable :
5/3 < Kt < infinito Leq.(s) de Fase no Mínima:
Kt: Parámetro Variable:
Para que el S istemasea Estable el M.G.en dB debe ser Negativo:
M.G., dB = - 2.6066 dB
Figura 15
Como Pw = 0 y P = 2, º36011 −=Φ E , por lo tanto el sistema será estable si Kt > 0 y además: 1)( −<CjL ω .-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 21
)1()5.14()( 22 ωωω
ωω−+−
=j
jKtjL ; la parte imaginaria sea nula si:
05.14 2 =− Cω ⇒ −≅⇒= ./633.13/82 segradCC ωω
Por lo tanto: 153
)1(1)( 2 −<
−=
−=
KtKtjLC
C ωω 3/5>⇒ Kt
En consecuencia el rango solicitado es: infinitoKt <<3/5 4) Con Ka = 0.5 = Cte., si se fija el parámetro variable Kt en, Kt = 2.25, el sistema será estable y el margen de ganancia, (recordar que la “ganancia” es Kt), deberá ser negativo, (figura 15), y su valor será:
⇒−=−= )35.1log(20)5/3log(20.,. KtdBGM M.G., dB = - 2.6066 dB.- • Para calcular el margen de fase, se deberá utilizar la L(s) real, como
ya se conoce y no la función de transferencia del lazo equivalente, por
ende: ssss
sssL25.2)2()1()4()2(5.0)(
++−++
= ⇒ )25.0()4()2(5.0)( 2 ++
++=
ssssssL ;
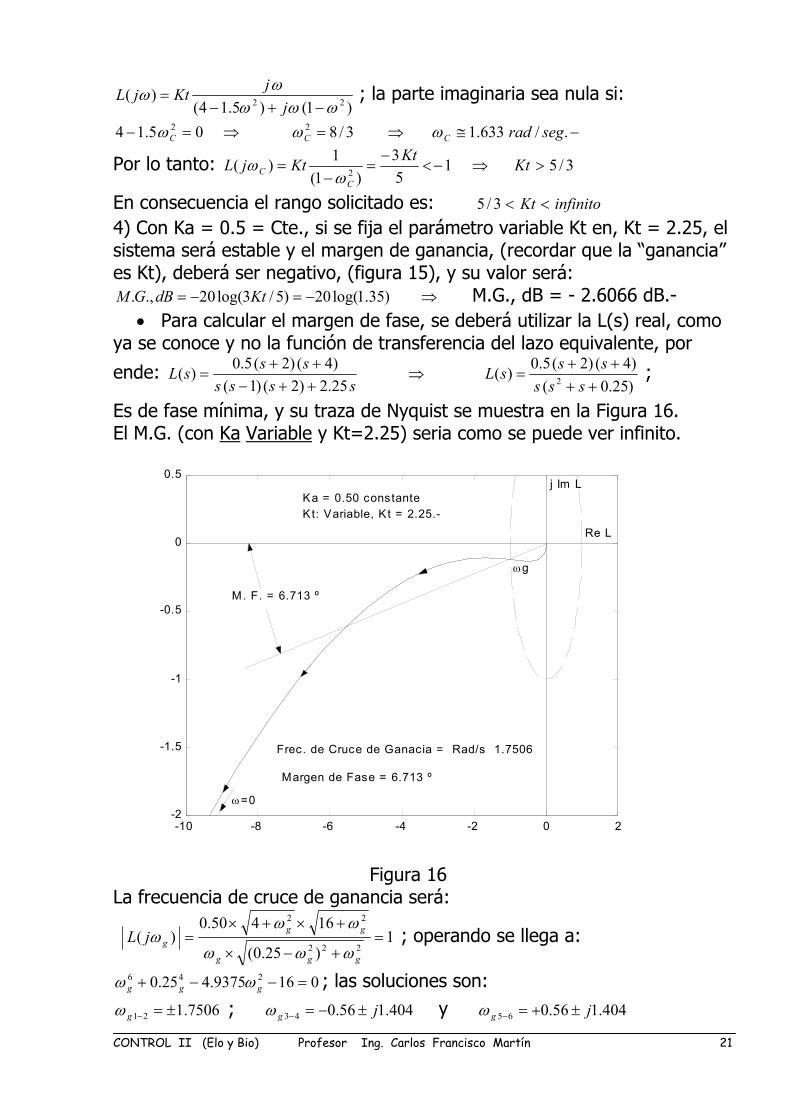
Es de fase mínima, y su traza de Nyquist se muestra en la Figura 16. El M.G. (con Ka Variable y Kt=2.25) seria como se puede ver infinito.
-10 -8 -6 -4 -2 0 2-2
-1.5
-1
-0.5
0
0.5j Im L
Re L
ωg
Frec. de Cruce de Ganacia = Rad/s 1.7506
Margen de Fase = 6.713 º
M. F. = 6.713 º
Ka = 0.50 constanteKt: Variable, Kt = 2.25.-
ω=0
Figura 16 La frecuencia de cruce de ganancia será:
1)25.0(
16450.0)(
222
22
=+−×
+×+×=
ggg
gggjL
ωωω
ωωω ; operando se llega a:
0169375.425.0 246 =−−+ ggg ωω ; las soluciones son: 7506.121 ±=−gω ; 404.156.043 jg ±−=−ω y 404.156.065 jg ±+=−ω
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 22
Por lo tanto la solución real y positiva es: −= ./7506.1 segradgω En consecuencia la fase de L(jwg) será:
)}25.0/(º90{)}4/()2/({)( 2111ggggg tagtagtagjL ωωωωω −+−+=∠ −−−
º287.173)118.148º90()º636.23º195.41( −=+−+= El margen de fase buscado será:
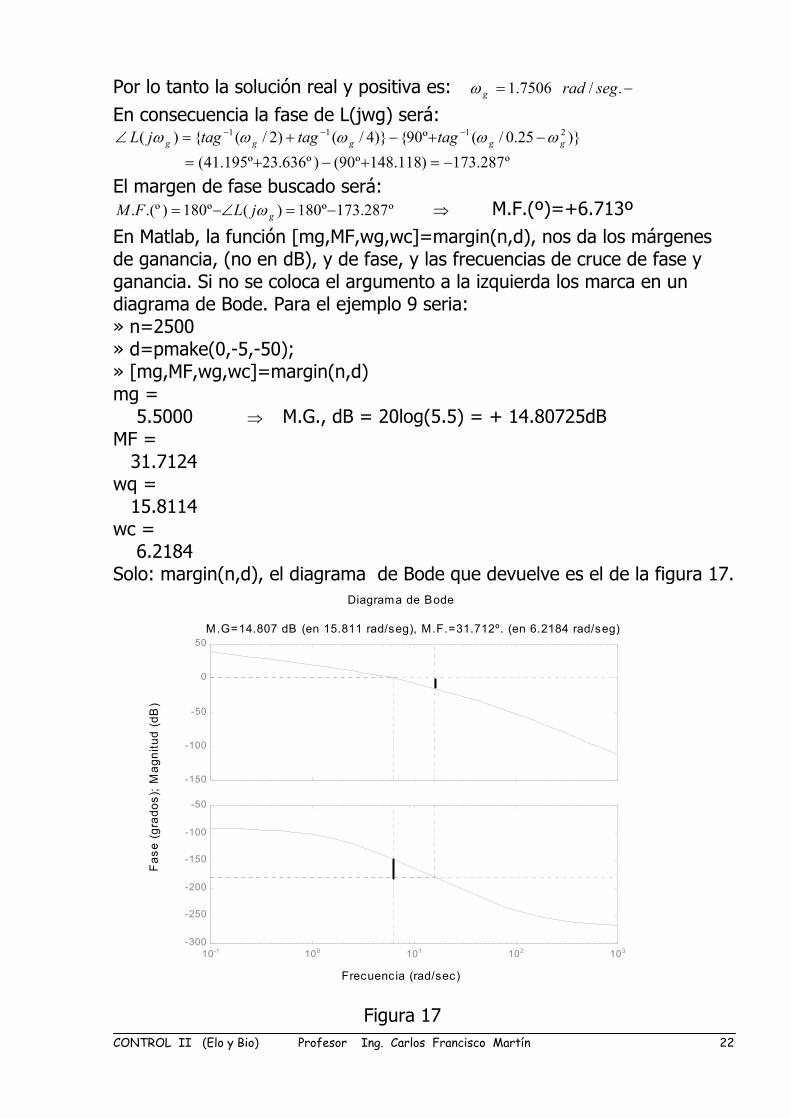
º287.173º180)(º180).(º. −=−∠= gjLFM ω ⇒ M.F.(º)=+6.713º En Matlab, la función [mg,MF,wg,wc]=margin(n,d), nos da los márgenes de ganancia, (no en dB), y de fase, y las frecuencias de cruce de fase y ganancia. Si no se coloca el argumento a la izquierda los marca en un diagrama de Bode. Para el ejemplo 9 seria: » n=2500 » d=pmake(0,-5,-50); » [mg,MF,wg,wc]=margin(n,d) mg = 5.5000 ⇒ M.G., dB = 20log(5.5) = + 14.80725dB MF = 31.7124 wq = 15.8114 wc = 6.2184 Solo: margin(n,d), el diagrama de Bode que devuelve es el de la figura 17.
Frecuencia (rad/sec)
Fas
e (g
rado
s);
Mag
nitu
d (d
B)
Diagrama de Bode
-150
-100
-50
0
50M.G=14.807 dB (en 15.811 rad/seg), M.F.=31.712º. (en 6.2184 rad/seg)
10-1 100 101 102 103-300
-250
-200
-150
-100
-50
Figura 17
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 23
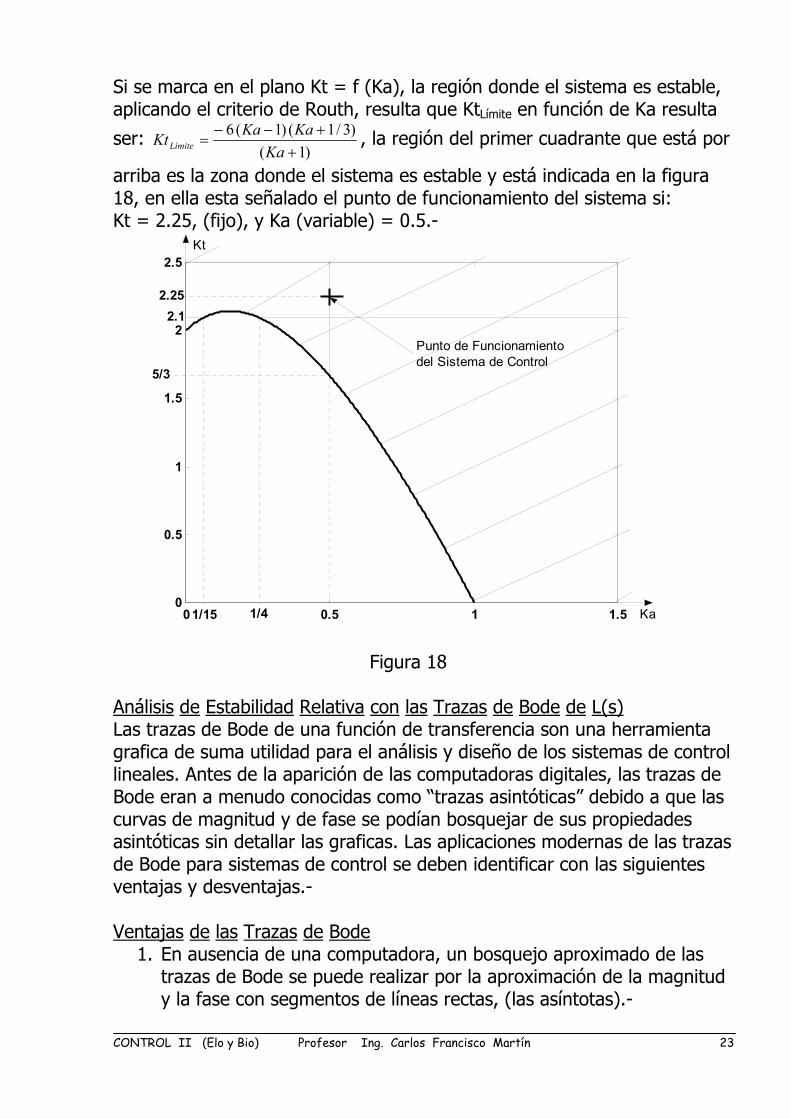
Si se marca en el plano Kt = f (Ka), la región donde el sistema es estable, aplicando el criterio de Routh, resulta que KtLímite en función de Ka resulta
ser: )1(
)3/1()1(6+
+−−=
KaKaKaKtLímite , la región del primer cuadrante que está por
arriba es la zona donde el sistema es estable y está indicada en la figura 18, en ella esta señalado el punto de funcionamiento del sistema si: Kt = 2.25, (fijo), y Ka (variable) = 0.5.-
0 0.5 1 1.50
0.5
1
1.5
2
2.5
1/15 1/4
2.1
5/3
Ka
Kt
2.25
Punto de Funcionamientodel Sistema de Control
Figura 18 Análisis de Estabilidad Relativa con las Trazas de Bode de L(s) Las trazas de Bode de una función de transferencia son una herramienta grafica de suma utilidad para el análisis y diseño de los sistemas de control lineales. Antes de la aparición de las computadoras digitales, las trazas de Bode eran a menudo conocidas como “trazas asintóticas” debido a que las curvas de magnitud y de fase se podían bosquejar de sus propiedades asintóticas sin detallar las graficas. Las aplicaciones modernas de las trazas de Bode para sistemas de control se deben identificar con las siguientes ventajas y desventajas.- Ventajas de las Trazas de Bode
1. En ausencia de una computadora, un bosquejo aproximado de las trazas de Bode se puede realizar por la aproximación de la magnitud y la fase con segmentos de líneas rectas, (las asíntotas).-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 24
2. El cruce de ganancia, el cruce de fase, el M.G. y el M.F. se determinan más fácilmente en las trazas de Bode que en las trazas de Nyquist.
3. Para propósitos de diseño, los efectos de añadir controladores y sus parámetros se visualizan con mayor facilidad sobre las trazas de Bode que sobre las de Nyquist.
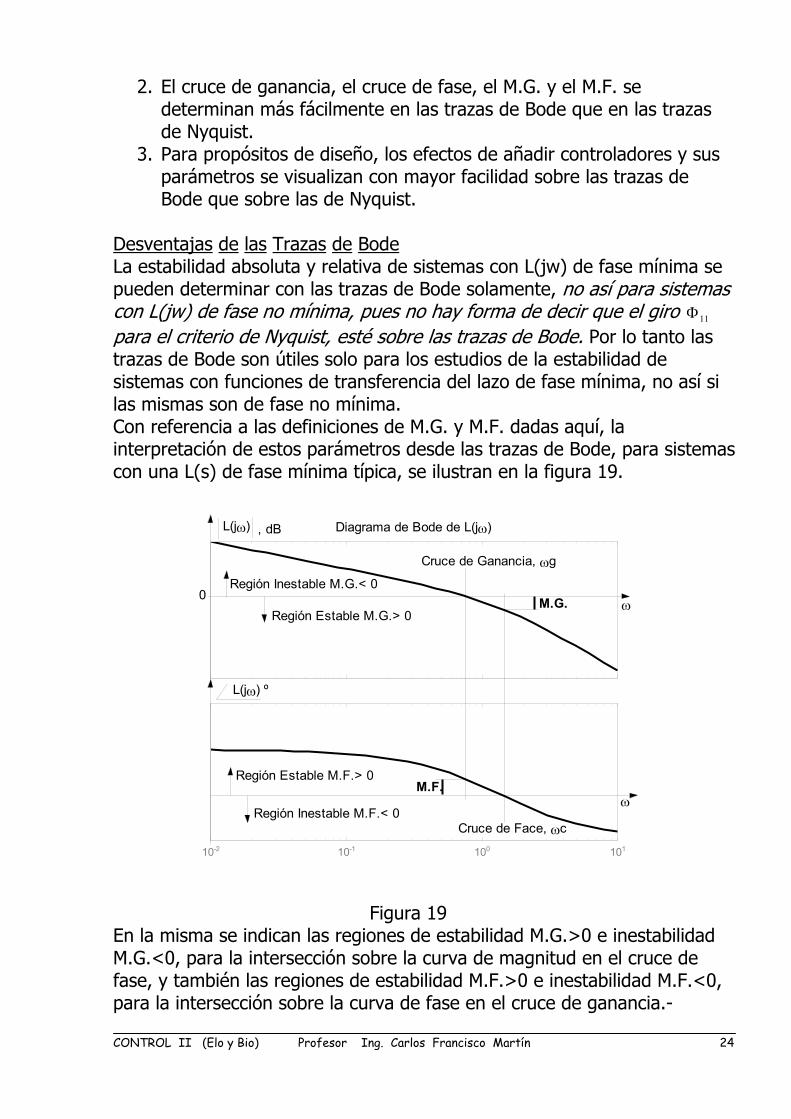
Desventajas de las Trazas de Bode La estabilidad absoluta y relativa de sistemas con L(jw) de fase mínima se pueden determinar con las trazas de Bode solamente, no así para sistemas con L(jw) de fase no mínima, pues no hay forma de decir que el giro 11Φ para el criterio de Nyquist, esté sobre las trazas de Bode. Por lo tanto las trazas de Bode son útiles solo para los estudios de la estabilidad de sistemas con funciones de transferencia del lazo de fase mínima, no así si las mismas son de fase no mínima. Con referencia a las definiciones de M.G. y M.F. dadas aquí, la interpretación de estos parámetros desde las trazas de Bode, para sistemas con una L(s) de fase mínima típica, se ilustran en la figura 19.
Diagrama de Bode de L(jω)
10-2 10-1 100 101
M.G.
M.F.
L(jω) , dB
0 ω
Cruce de Ganancia, ωg
Cruce de Face, ωc
ω
L(jω) º
Región Inestable M.G.< 0
Región Estable M.G.> 0
Región Estable M.F.> 0
Región Inestable M.F.< 0
Figura 19 En la misma se indican las regiones de estabilidad M.G.>0 e inestabilidad M.G.<0, para la intersección sobre la curva de magnitud en el cruce de fase, y también las regiones de estabilidad M.F.>0 e inestabilidad M.F.<0, para la intersección sobre la curva de fase en el cruce de ganancia.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 25
Las observaciones siguientes se pueden hacer sobre la estabilidad del sistema con la L(s) típica y de fase mínima, respecto a las propiedades de las trazas de Bode.
1. El M.G. es positivo y el sistema es estable si la magnitud de L (jw) en el cruce de fase es negativa en dB. Esto es el M.G. se mide abajo del eje de 0 dB. Si el M.G. se mide arriba del eje de 0 dB, el M.G. es negativo en dB y el sistema es inestable.
2. El M.F. es positivo y el sistema es estable si la fase de L(jw) es mayor que -180º en el cruce de ganancia. Esto es, el M.F. se mide arriba del eje de -180º. Si el M.F. se mide abajo del eje de -180º, el M.F. es negativo y el sistema es inestable.-
3. Para sistemas con la L(s) atípicas de fase mínima, el mismo será estable, wC > wg y las regiones de estabilidad y de inestabilidad cambian, arriba estará la región para la estabilidad.
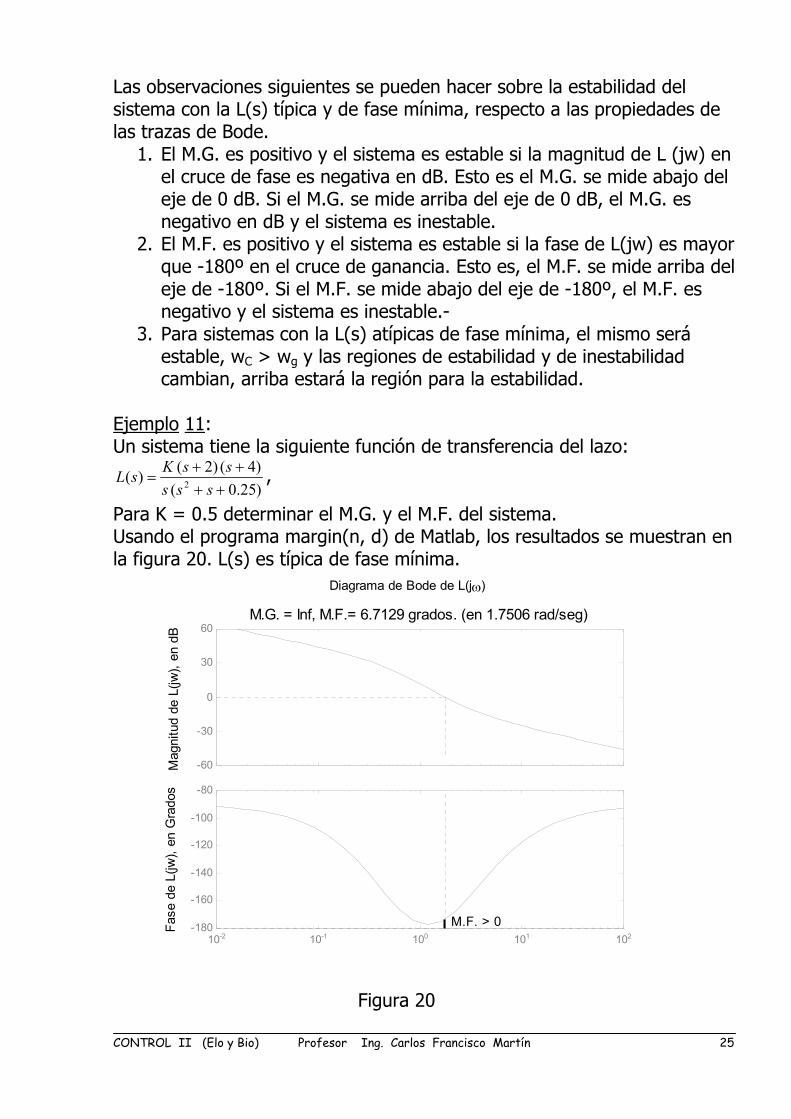
Ejemplo 11: Un sistema tiene la siguiente función de transferencia del lazo:
)25.0()4()2()( 2 ++
++=
sssssKsL ,
Para K = 0.5 determinar el M.G. y el M.F. del sistema. Usando el programa margin(n, d) de Matlab, los resultados se muestran en la figura 20. L(s) es típica de fase mínima.
Diagrama de Bode de L(jω)
-60
-30
0
30
60M.G. = Inf, M.F.= 6.7129 grados. (en 1.7506 rad/seg)
Mag
nitu
d de
L(jw
), en
dB
10-2 10-1 100 101 102-180
-160
-140
-120
-100
-80
Fase
de
L(jw
), en
Gra
dos
M.F. > 0
Figura 20
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 26
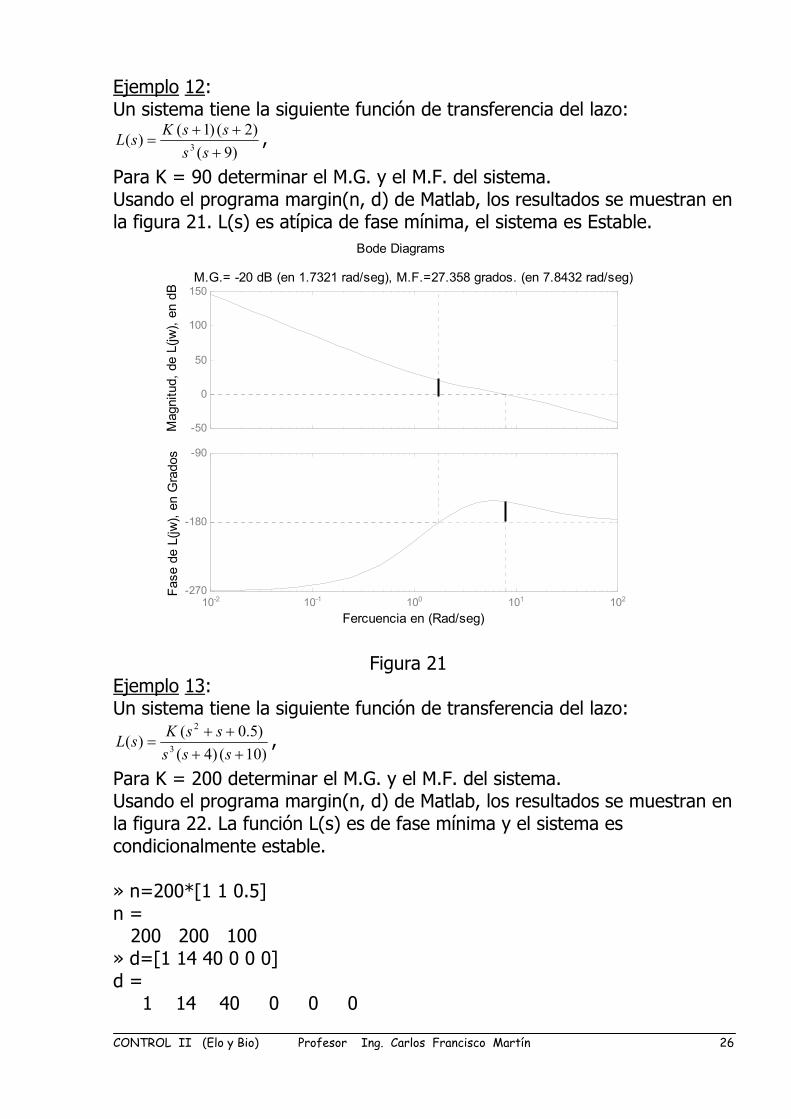
Ejemplo 12: Un sistema tiene la siguiente función de transferencia del lazo:
)9()2()1()( 3 +
++=
ssssKsL ,
Para K = 90 determinar el M.G. y el M.F. del sistema. Usando el programa margin(n, d) de Matlab, los resultados se muestran en la figura 21. L(s) es atípica de fase mínima, el sistema es Estable.
Bode Diagrams
-50
0
50
100
150M.G.= -20 dB (en 1.7321 rad/seg), M.F.=27.358 grados. (en 7.8432 rad/seg)
Mag
nitu
d, d
e L(
jw),
en d
B
10-2 10-1 100 101 102-270
-180
-90
Fercuencia en (Rad/seg)
Fase
de
L(jw
), en
Gra
dos
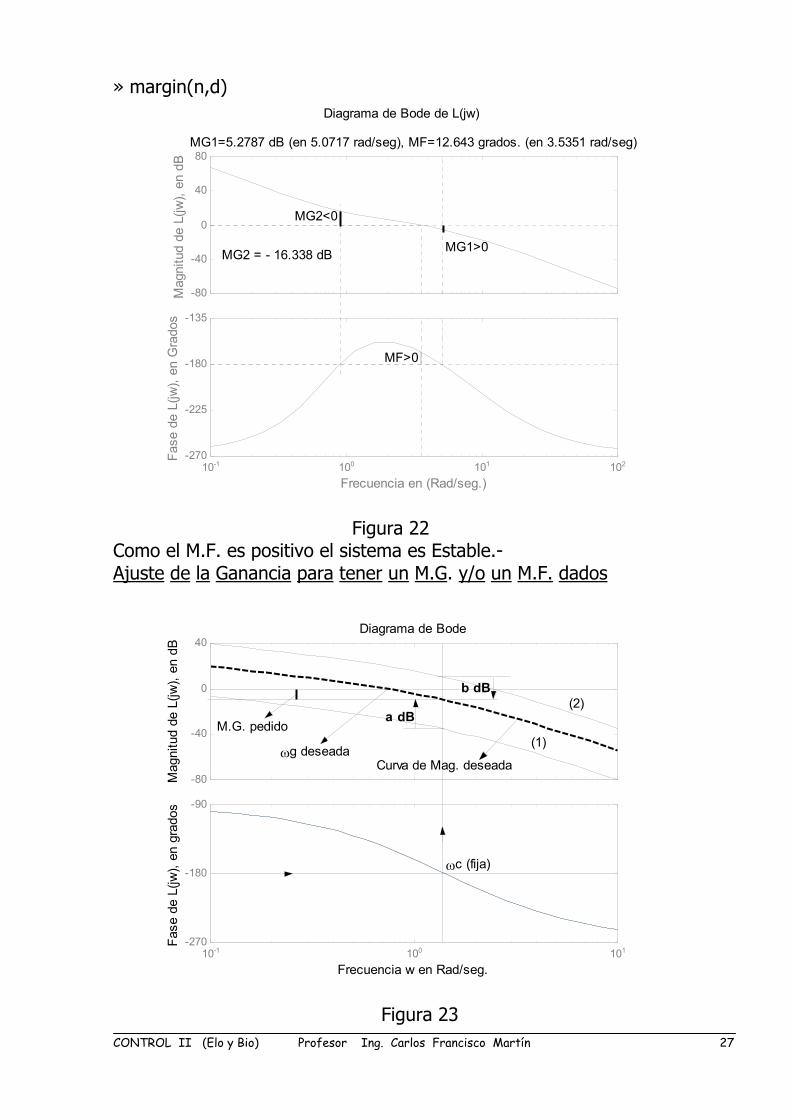
Figura 21 Ejemplo 13: Un sistema tiene la siguiente función de transferencia del lazo:
)10()4()5.0()( 3
2
++++
=sssssKsL ,
Para K = 200 determinar el M.G. y el M.F. del sistema. Usando el programa margin(n, d) de Matlab, los resultados se muestran en la figura 22. La función L(s) es de fase mínima y el sistema es condicionalmente estable. » n=200*[1 1 0.5] n = 200 200 100 » d=[1 14 40 0 0 0] d = 1 14 40 0 0 0
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 27
» margin(n,d) Diagrama de Bode de L(jw)
-80
-40
0
40
80MG1=5.2787 dB (en 5.0717 rad/seg), MF=12.643 grados. (en 3.5351 rad/seg)
Mag
nitu
d de
L(jw
), en
dB
10-1 100 101 102-270
-225
-180
-135
Frecuencia en (Rad/seg.)
Fase
de
L(jw
), en
Gra
dos
MG2<0
MG1>0
MF>0
MG2 = - 16.338 dB
Figura 22 Como el M.F. es positivo el sistema es Estable.- Ajuste de la Ganancia para tener un M.G. y/o un M.F. dados
-80
-40
0
40
Mag
nitu
d de
L(jw
), en
dB
Diagrama de Bode
10-1 100 101-270
-180
-90
Frecuencia w en Rad/seg.
Fase
de
L(jw
), en
gra
dos
M.G. pedido
ωc
ωg deseada (1)
(2) a dB
b dB
(fija)
Curva de Mag. deseada
Figura 23
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 28
-80
-40
0
40
Mag
nitu
d de
L(jw
), en
dB
Diagrama de Bode
10-1 100 101-270
-180
-90
Frecuencia w en Rad/seg.
Fase
de
L(jw
), en
gra
dos
M.F. pedido
(1)
(2) a dB
b dB
ωg deseada
Curva de Mag. deseada
ωc (fija)
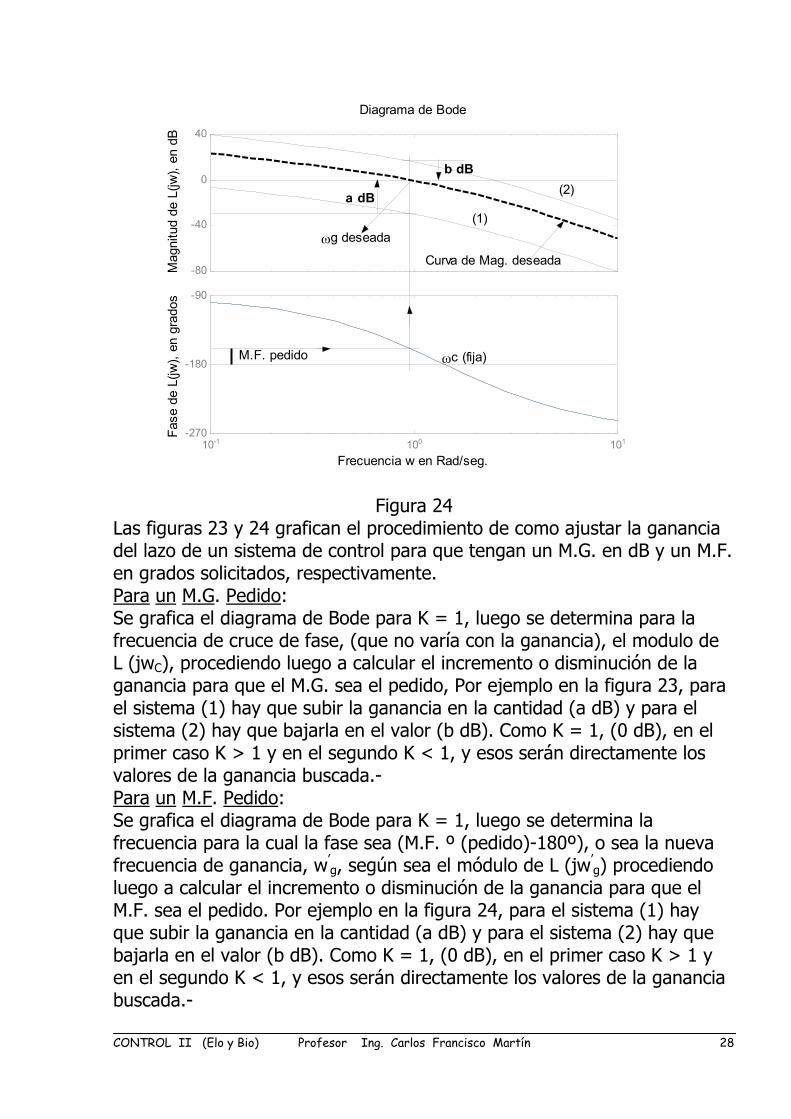
Figura 24 Las figuras 23 y 24 grafican el procedimiento de como ajustar la ganancia del lazo de un sistema de control para que tengan un M.G. en dB y un M.F. en grados solicitados, respectivamente. Para un M.G. Pedido: Se grafica el diagrama de Bode para K = 1, luego se determina para la frecuencia de cruce de fase, (que no varía con la ganancia), el modulo de L (jwC), procediendo luego a calcular el incremento o disminución de la ganancia para que el M.G. sea el pedido, Por ejemplo en la figura 23, para el sistema (1) hay que subir la ganancia en la cantidad (a dB) y para el sistema (2) hay que bajarla en el valor (b dB). Como K = 1, (0 dB), en el primer caso K > 1 y en el segundo K < 1, y esos serán directamente los valores de la ganancia buscada.- Para un M.F. Pedido: Se grafica el diagrama de Bode para K = 1, luego se determina la frecuencia para la cual la fase sea (M.F. º (pedido)-180º), o sea la nueva frecuencia de ganancia, w’
g, según sea el módulo de L (jw’g) procediendo
luego a calcular el incremento o disminución de la ganancia para que el M.F. sea el pedido. Por ejemplo en la figura 24, para el sistema (1) hay que subir la ganancia en la cantidad (a dB) y para el sistema (2) hay que bajarla en el valor (b dB). Como K = 1, (0 dB), en el primer caso K > 1 y en el segundo K < 1, y esos serán directamente los valores de la ganancia buscada.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 29
Ejemplo 14: Un sistema de control tiene la siguiente L(s):
3)3()(
+=sKsL ;
a) Determinar el valor de K para que el M.G. sea de 20 dB. b) Determinar el valor de K para que el M.F. sea de 45º.
Se puede usar la función Bplot del Csad: Una vez ingresada L(s) con K = 1, y graficado el diagrama de Bode, para el rango de frecuencia de w = 1 a w = 10. Luego con el comando Interpolate se procede así: BPLOT > i Search given Mag, Phase or Freq? [p] > p Max value allowed is -55.3 Min value allowed is -219.9 Enter Phase > -180 Interpolated Data Points are: Frequency Magnitude Phase 5.1964 -46.6897 -180.0000 Luego a los dB que hay que subir: 46.6897-20 = 26.6897 ⇒ 60155.216897.26 =⇒+= KdBK Por lo tanto con K = 21.60155, el sistema tendrá un M.G-= +20 dB.- Luego con el comando Interpolate se procede así: BPLOT > i Search given Mag, Phase or Freq? [p] > p Max value allowed is -55.3 Min value allowed is -219.9 Enter Phase > -135 Interpolated Data Points are: Frequency Magnitude Phase 3.0001 -37.6588 -135.0000 Luego a los dB que hay que subir: 37.6588 dB ⇒ 373.766588.37 =⇒+= KdBK Por lo tanto con K = 76.373, el sistema tendrá un M.F-= +45º.- Ejemplo 15: Un sistema de control tiene la siguiente L(s):
)01.01.01()( 2sss
eKsLS
++=
−
;
c) Determinar el valor de K para que el M.G. sea de 10 dB. d) Determinar el valor de K para que el M.F. sea de 45º.
También se puede usar la función Bplot del Csad: Una vez ingresada L(s) con K = 1. Se introduce el tiempo del retardo así:
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 30
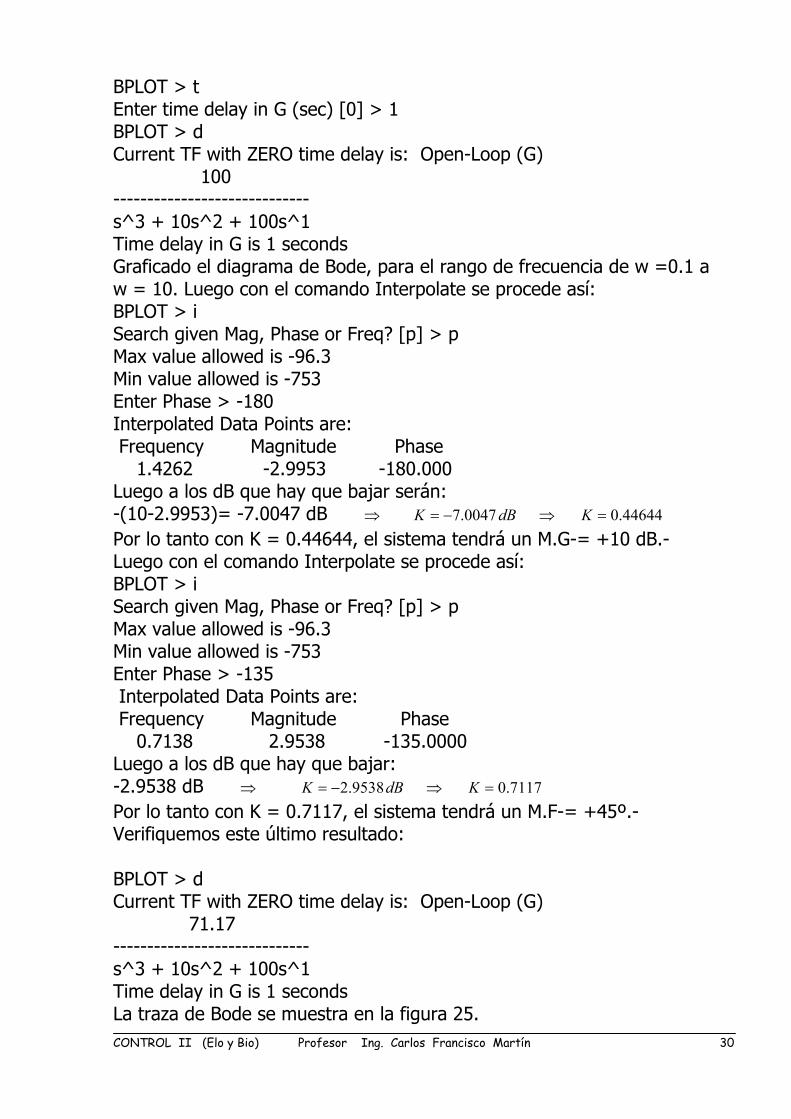
BPLOT > t Enter time delay in G (sec) [0] > 1 BPLOT > d Current TF with ZERO time delay is: Open-Loop (G) 100 ----------------------------- s^3 + 10s^2 + 100s^1 Time delay in G is 1 seconds Graficado el diagrama de Bode, para el rango de frecuencia de w =0.1 a w = 10. Luego con el comando Interpolate se procede así: BPLOT > i Search given Mag, Phase or Freq? [p] > p Max value allowed is -96.3 Min value allowed is -753 Enter Phase > -180 Interpolated Data Points are: Frequency Magnitude Phase 1.4262 -2.9953 -180.000 Luego a los dB que hay que bajar serán: -(10-2.9953)= -7.0047 dB ⇒ 44644.00047.7 =⇒−= KdBK Por lo tanto con K = 0.44644, el sistema tendrá un M.G-= +10 dB.- Luego con el comando Interpolate se procede así: BPLOT > i Search given Mag, Phase or Freq? [p] > p Max value allowed is -96.3 Min value allowed is -753 Enter Phase > -135 Interpolated Data Points are: Frequency Magnitude Phase 0.7138 2.9538 -135.0000 Luego a los dB que hay que bajar: -2.9538 dB ⇒ 7117.09538.2 =⇒−= KdBK Por lo tanto con K = 0.7117, el sistema tendrá un M.F-= +45º.- Verifiquemos este último resultado: BPLOT > d Current TF with ZERO time delay is: Open-Loop (G) 71.17 ----------------------------- s^3 + 10s^2 + 100s^1 Time delay in G is 1 seconds La traza de Bode se muestra en la figura 25.
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 31
10-1 100-20
-10
0
10
20
Mag
nitu
d, d
B
wg=0.7136 Rad/s M.F.=45.00 Grados wc=1.426 Rad/s M.G.=5.949 dB
10-1 100-360
-270
-180
-90
0
Gra
dos
Frecuencia en Rad/s
Figura 25 Estabilidad Relativa Relacionada con la Pendiente de la Curva de Magnitud de las Trazas de Bode. Además del M.G. el M.F. y el MR como medida de la estabilidad relativa, la pendiente de la curva de magnitud de las trazas de Bode de L (jw) en el cruce de ganancia, también da una indicación cualitativa sobre la estabilidad relativa del sistema de control. Por ejemplo en la figura 17, si la ganancia del lazo disminuye desde su valor nominal K=2500, la curva de magnitud se correrá hacia abajo, mientras que la curva de fase permanece sin cambios. Esto causa que la frecuencia de cruce de ganancia gω , sea menor, y la pendiente de la curva de magnitud en esta frecuencia sea menos negativa, y el margen de fase correspondiente se incrementa. Por otra parte, si la ganancia del lazo se incrementa la frecuencia de cruce de ganancia se incrementa y la pendiente de la curva de magnitud en la nueva gω , es más negativa. Esto corresponde a un margen de fase más pequeño y el sistema es menos estable, (si gω < Cω ). Si gω = Cω , el sistema será marginalmente estable y si gω > Cω , inestable.- La razón de estas evaluaciones de la estabilidad es muy simple. Para una L (jw) de fase mínima la relación entre la magnitud y la fase es única. Ya que la pendiente negativa de la curva de magnitud es el resultado de tener más polos que ceros en L (jw), la fase correspondiente también es negativa.
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 32
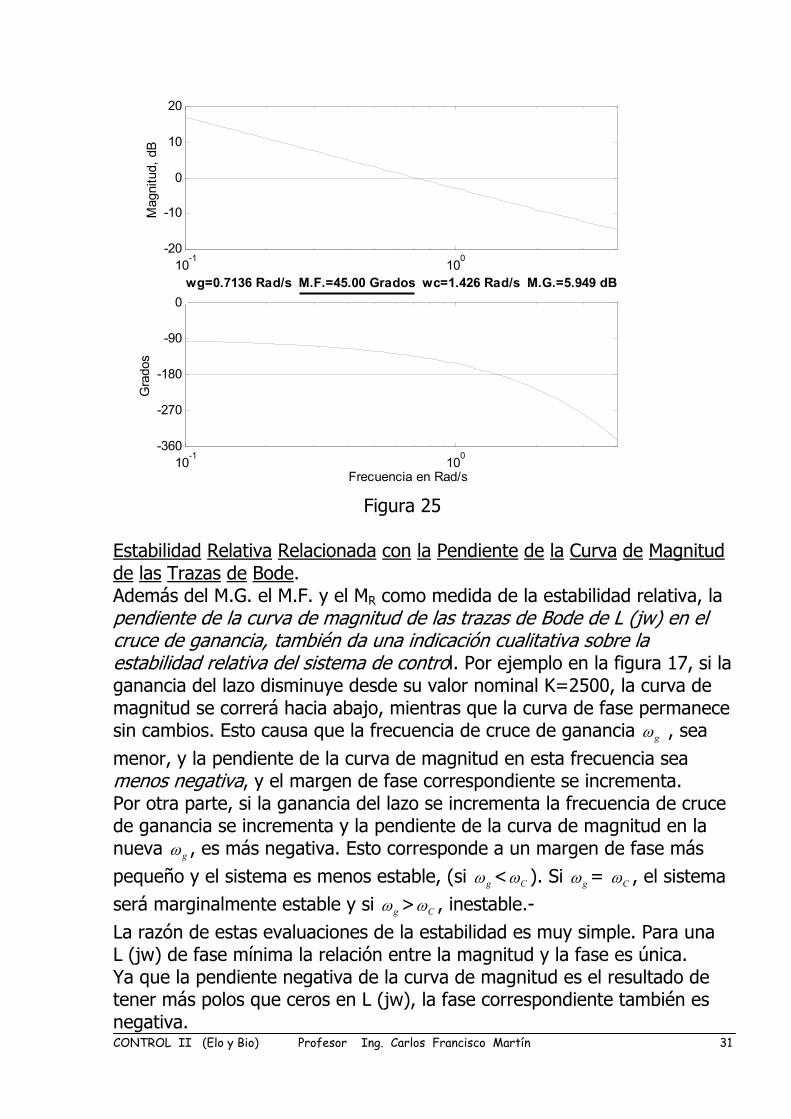
En general, mientras más pequeña es la pendiente de la curva de magnitud, (en gω ), más pequeña será la fase. Por ende, si gω está en un valor donde la pendiente de la curva de magnitud es muy negativa, (-40, -60dB/dec, etc.), esto corresponderá a un M.F. que será pequeño o negativo. El ejemplo considerado no es complicado en el sentido que las pendientes de la curva de magnitud y fase decrecen monotonicamente conforme la frecuencia se incrementa. Ejemplo 16: Este ejemplo ilustra un sistema condicionalmente estable que pasa de condición de estable a inestable conforme la ganancia del lazo varia. Consideremos que:
)200()100()40()5(100)( 3 ++
++=
sssssKsL
Las trazas de Bode de L (jw) se muestran en la figura 26 para K=1.
-160
-120
-80
-40
0
40
80
Mód
ulo
de L
(jw),
en d
B
Diagrama de BodeSistema Condicionalmente Estable
10-1 100 101 102 103-270
-225
-180
Frecuencia (Rad/seg.)
Fase
de
L(jw
), en
Gra
dos
Cruces de Fase
25.8
77.7
-69
-85.5
Cruce de Ganancia
-60dB/dec -40dB/dec
-20dB/dec -40dB/dec
-60dB/dec
25.8 77.7
-258º
Figura 26 Se obtienen los siguientes resultados sobre la estabilidad relativa del sistema. º78../1 −=⇒= FMsegradgω Hay dos cruces de fase: uno en ./8.252 segradC =ω y otro en ./7.771 segradC =ω Las características de fase entre estas dos frecuencias indican que si el cruce de ganancia está en este rango, )./7.77./8.25( segradsegradg →=ω , el sistema será estable. De la curva de magnitud el rango para la operación estable esta entre: 69 y 85.5 dB o (K=2818.38→ 18836.49).-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 33
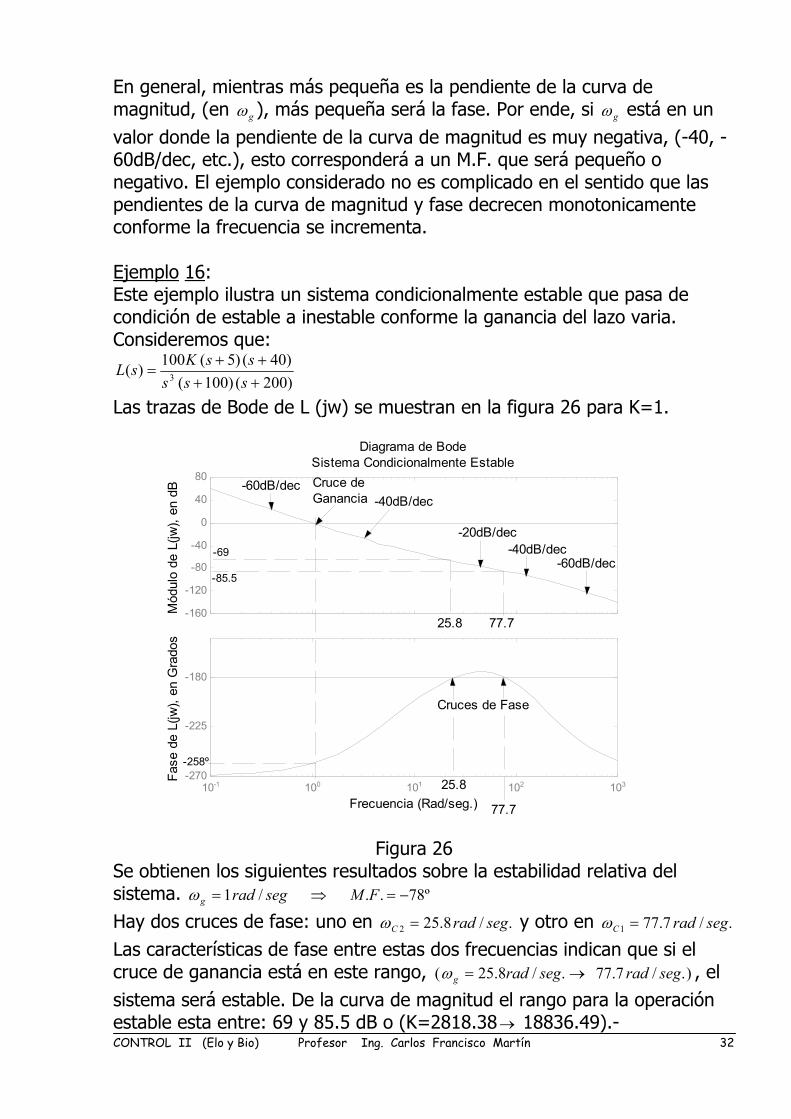
Para los valores de K por arriba y por debajo de este intervalo, la fase de L (jw) es menor que -180º, y el sistema será inestable. Este sistema sirve como un buen ejemplo de la relación entre la estabilidad relativa y la pendiente de la curva de magnitud en el cruce de ganancia. Como se observa en la figura 26, tanto en las frecuencias altas como en las bajas, la pendiente de la curva de magnitud es de -60 dB/dec, si el cruce de ganancia ( gω ), cae en cualquiera de estas dos regiones, el margen de fase es negativo y el sistema es inestable. Si las dos secciones de la curva de magnitud tienen una pendiente de -40 dB/dec, el sistema es estable solo si el cruce de ganancia cae alrededor del punto medio de estas dos regiones, pero aún entonces, el margen de fase es pequeño. Si el cruce de ganancia cae en la región en donde la curva de magnitud tiene una pendiente de -20 dB/dec, el sistema es estable. En definitiva si: “La pendiente de la curva de magnitud en el punto de cruce de ganancia debe ser más positiva que -40 dB/dec.” La figura 27 muestra la traza de Nyquist de L (jw).
-5 -4 -3 -2 -1 0
x 10-4
-3
-2
-1
0
1
2x 10-5 Traza de Nyquist de L(jw)
jIm L
Re L ωc1=77.7 r/s ωc2=25.8 r/s
-3.55x10-4 K -0.53x10-4 K
ω = 0
Figura 27 Y la figura 28 el lugar de las raíces de la ecuación característica del sistema de control cuando varía la ganancia del lazo del sistema K, en el rango positivo.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 34
-250 -200 -150 -100 -50 0 50-200
-150
-100
-50
0
50
100
150
200Lugar de las Raíces de la Ecuacion Característca
K=1e+004
jω
σ
j77.7 K=18836.49
j25.8 K=2818.38
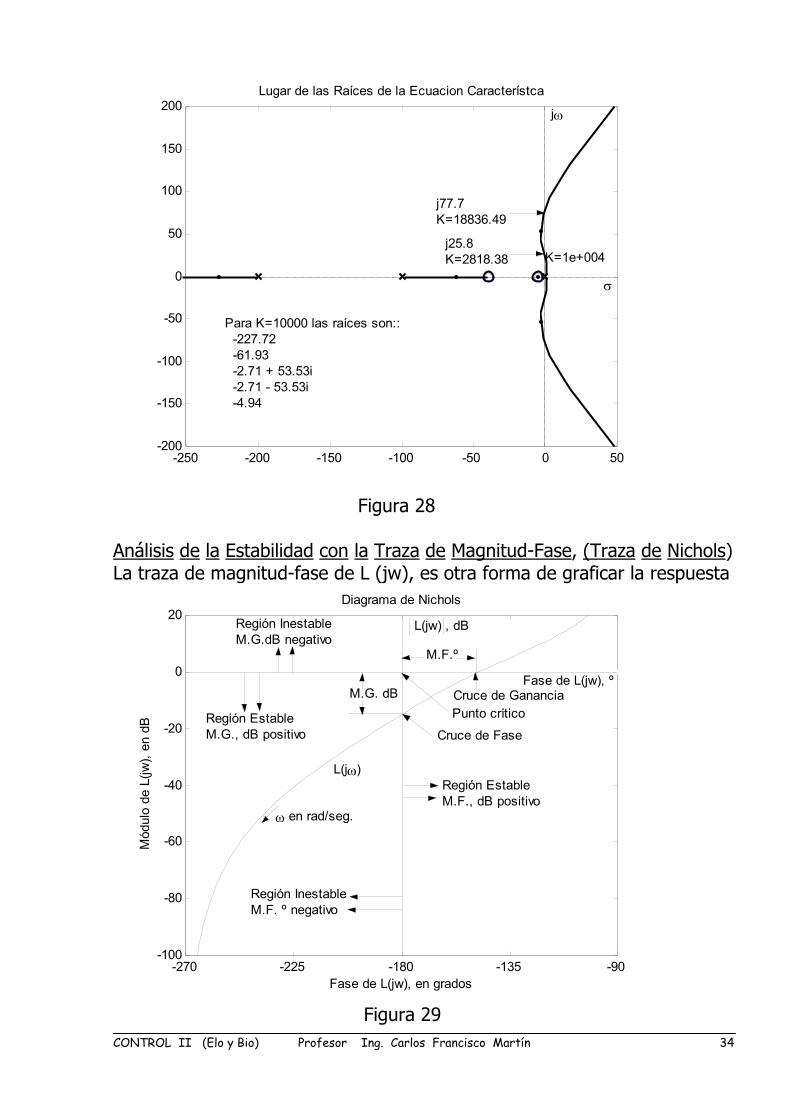
Para K=10000 las raíces son:: -227.72 -61.93 -2.71 + 53.53i -2.71 - 53.53i -4.94
Figura 28 Análisis de la Estabilidad con la Traza de Magnitud-Fase, (Traza de Nichols) La traza de magnitud-fase de L (jw), es otra forma de graficar la respuesta
-270 -225 -180 -135 -90-100
-80
-60
-40
-20
0
20
Mód
ulo
de L
(jw),
en d
B
Diagrama de Nichols
Fase de L(jw), en grados
M.G. dB
M.F.º
L(jw) , dB
Fase de L(jw), º Cruce de Ganancia
Cruce de Fase
Región Estable M.F., dB positivo
Región InestableM.F. º negativo
ω en rad/seg.
L(jω)
Región Estable M.G., dB positivo
Región InestableM.G.dB negativo
Punto crítico
Figura 29
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 35
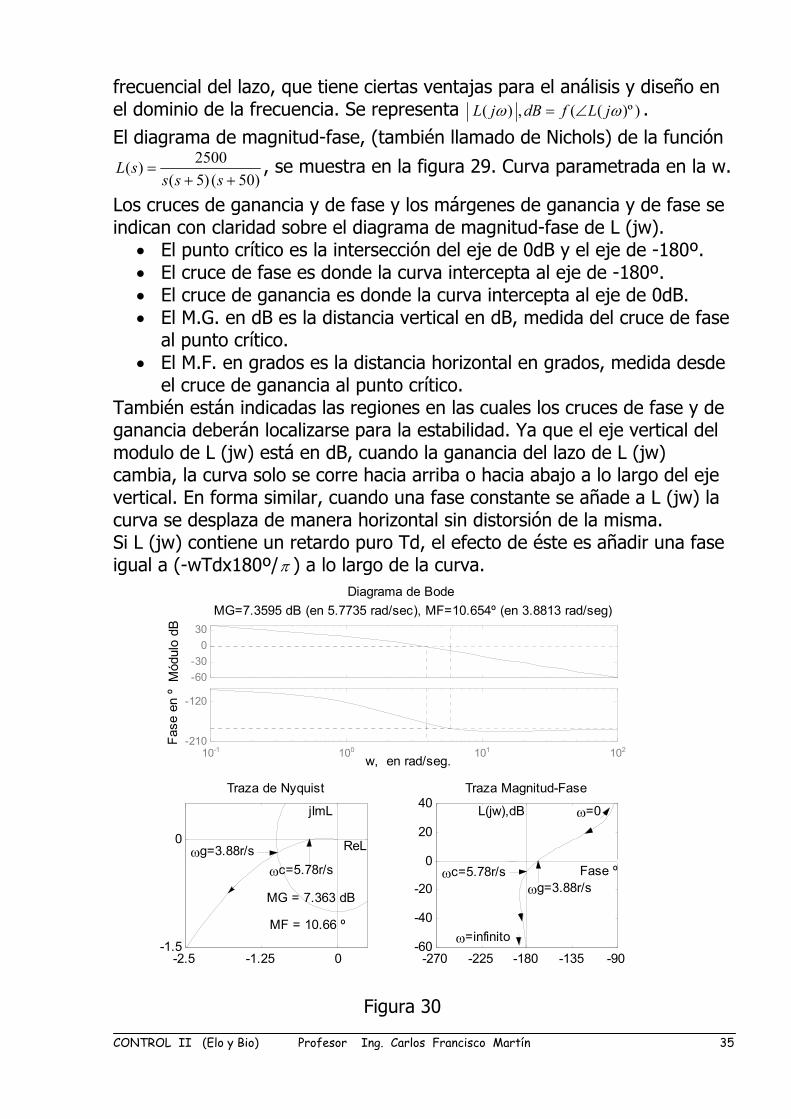
frecuencial del lazo, que tiene ciertas ventajas para el análisis y diseño en el dominio de la frecuencia. Se representa ))º((,)( ωω jLfdBjL ∠= . El diagrama de magnitud-fase, (también llamado de Nichols) de la función
)50()5(2500)(
++=
ssssL , se muestra en la figura 29. Curva parametrada en la w.
Los cruces de ganancia y de fase y los márgenes de ganancia y de fase se indican con claridad sobre el diagrama de magnitud-fase de L (jw).
• El punto crítico es la intersección del eje de 0dB y el eje de -180º. • El cruce de fase es donde la curva intercepta al eje de -180º. • El cruce de ganancia es donde la curva intercepta al eje de 0dB. • El M.G. en dB es la distancia vertical en dB, medida del cruce de fase
al punto crítico. • El M.F. en grados es la distancia horizontal en grados, medida desde
el cruce de ganancia al punto crítico. También están indicadas las regiones en las cuales los cruces de fase y de ganancia deberán localizarse para la estabilidad. Ya que el eje vertical del modulo de L (jw) está en dB, cuando la ganancia del lazo de L (jw) cambia, la curva solo se corre hacia arriba o hacia abajo a lo largo del eje vertical. En forma similar, cuando una fase constante se añade a L (jw) la curva se desplaza de manera horizontal sin distorsión de la misma. Si L (jw) contiene un retardo puro Td, el efecto de éste es añadir una fase igual a (-wTdx180º/π ) a lo largo de la curva.
-2.5 -1.25 0-1.5
0
MG = 7.363 dB
MF = 10.66 º
Traza de Nyquist
-270 -225 -180 -135 -90-60
-40
-20
0
20
40Traza Magnitud-Fase
Diagrama de Bode
-60-30
030
MG=7.3595 dB (en 5.7735 rad/sec), MF=10.654º (en 3.8813 rad/seg)
Mód
ulo
dB
10-1 100 101 102-210
-120
w, en rad/seg.
Fase
en
º
L(jw),dB
Fase º ωc=5.78r/s ωg=3.88r/s
ω=0
ω=infinito
jImL
ReL
ωc=5.78r/s ωg=3.88r/s
Figura 30
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 36
Como ejemplo ilustrativo la traza polar, (diagrama de Nyquist), la traza de Bode y la traza de magnitud-fase, (diagrama de Nichols) de un sistema de control con realimentación unitaria se muestran en la figura 30, la G(s) es:
)5)(2()10(10)(++
+=
sssssG
Las relaciones entre estas tres trazas son con facilidad identificadas al comparar las curvas de la figura 30. Otra ventaja de emplear la traza de magnitud-fase es que para sistemas con realimentación unitaria, los parámetros del sistema de control, tales como BARR yM ωω ;; , se pueden determinar de la traza con la ayuda del lugar geométrico de M constante. Estos parámetros de desempeño del sistema no están representados en las trazas de Bode de la función de transferencia de la trayectoria directa de un sistema con realimentación unitaria. Lugar Geométrico de M Constante en el Plano G (jw) Anteriormente se señaló que es difícil de determinar en forma analítica el pico de resonancia MR y el ancho de banda wA B, para sistemas de orden superior, y las trazas de Bode proveen información sobre el sistema en lazo cerrado sólo en la forma de margen de ganancia y margen de fase. Se mencionará un método gráfico para la determinación de BARR yM ωω ;; , empleando la función de transferencia de la trayectoria directa G (jw). Como se apreciara en el desarrollo siguiente, el método es en directo aplicable sólo a sistemas con realimentación unitaria, aún cuando con algunas modificaciones también se puede aplicar a sistemas con realimentación no unitaria. Se supondrá que G(s) es la función de transferencia de la trayectoria directa de un sistema con realimentación unitaria. La función de transferencia del sistema es:
)(1)()(sGsGsM
+=
Para un estado senoidal permanente, se reemplaza s por jw, y G (jw) será: yjxG(jw)jImG(jw)RejwG +=+=)(
La magnitud de la función de transferencia del sistema se escribe:
22
22
)1()(1)()(
yx
yxjwGjwGjwM
++
+=
+=
En adelante, por simplicidad, se M denotará a el MjwM ≡)( : { } (*))1( 22222 yxyxM +=++
Por lo tanto operando se puede demostrar que se llega a:
111
2
22
2
2
2
≠
−
=+
−
− MconMMy
MMx (**)
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 37
Para un valor dado de M, la última ecuación representa una circunferencia con coordenadas del centro en:
0;1 02
2
0 =−
= yMMx
Y el radio de las mismas con valor:
21 MMr−
=
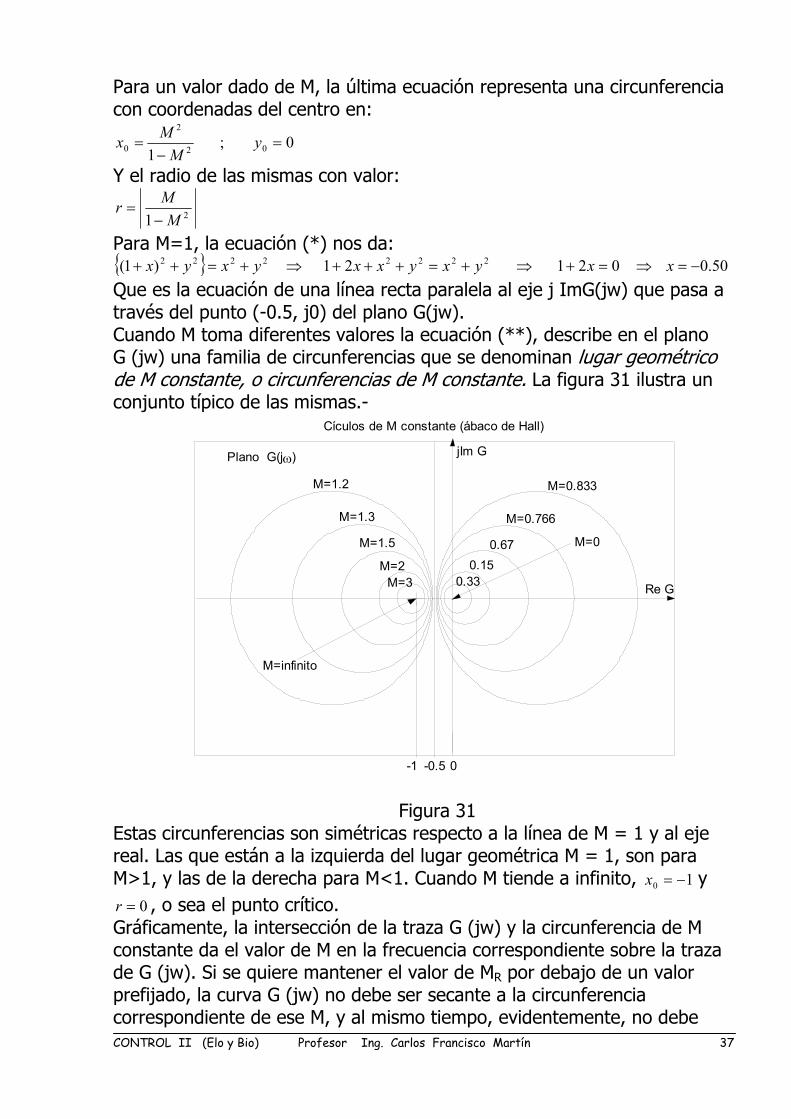
Para M=1, la ecuación (*) nos da: { } ⇒+=++ 2222)1( yxyx 50.002121 2222 −=⇒=+⇒+=+++ xxyxyxx Que es la ecuación de una línea recta paralela al eje j ImG(jw) que pasa a través del punto (-0.5, j0) del plano G(jw). Cuando M toma diferentes valores la ecuación (**), describe en el plano G (jw) una familia de circunferencias que se denominan lugar geométrico de M constante, o circunferencias de M constante. La figura 31 ilustra un conjunto típico de las mismas.-
Cículos de M constante (ábaco de Hall)
jIm G
Re G
M=1.2
M=1.3
M=1.5
M=2 M=3 0.33
0.15 0.67
M=0.766
M=0.833
M=infinito
M=0
-0.5
Plano G(jω)
-1 0
Figura 31 Estas circunferencias son simétricas respecto a la línea de M = 1 y al eje real. Las que están a la izquierda del lugar geométrica M = 1, son para M>1, y las de la derecha para M<1. Cuando M tiende a infinito, 10 −=x y
0=r , o sea el punto crítico. Gráficamente, la intersección de la traza G (jw) y la circunferencia de M constante da el valor de M en la frecuencia correspondiente sobre la traza de G (jw). Si se quiere mantener el valor de MR por debajo de un valor prefijado, la curva G (jw) no debe ser secante a la circunferencia correspondiente de ese M, y al mismo tiempo, evidentemente, no debe
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 38
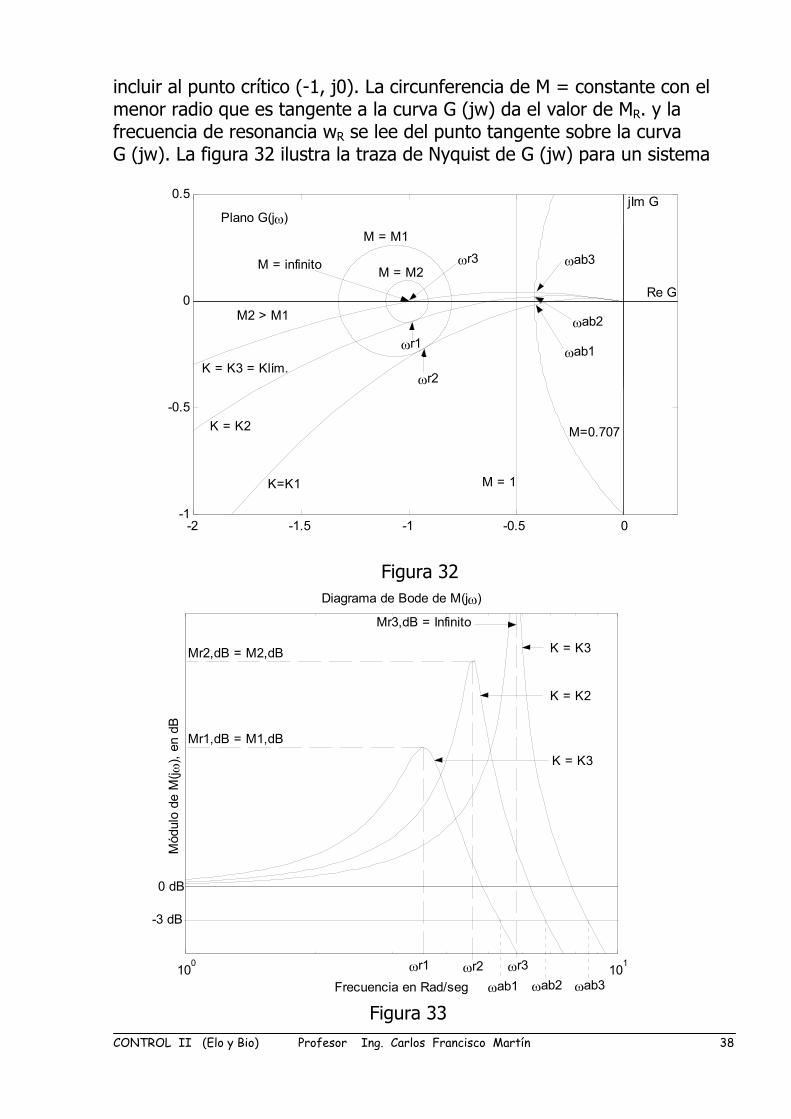
incluir al punto crítico (-1, j0). La circunferencia de M = constante con el menor radio que es tangente a la curva G (jw) da el valor de MR. y la frecuencia de resonancia wR se lee del punto tangente sobre la curva G (jw). La figura 32 ilustra la traza de Nyquist de G (jw) para un sistema
-2 -1.5 -1 -0.5 0-1
-0.5
0
0.5 jIm G
Re G
Plano G(jω) M = M1
M=0.707
M = M2
K=K1
K = K2
K = K3 = Klím.
M = infinito
ωr1
ωr2
M2 > M1
ωab3
ωab2
ωab1
ωr3
M = 1
Figura 32
100 101
Diagrama de Bode de M(jω)
Frecuencia en Rad/seg
Mód
ulo
de M
(j ω),
en d
B
Mr2,dB = M2,dB
Mr1,dB = M1,dB
0 dB
-3 dB
ωr1 ωr2 ωr3
ωab1 ωab2 ωab3
Mr3,dB = Infinito
K = K3
K = K2
K = K3
Figura 33
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 39
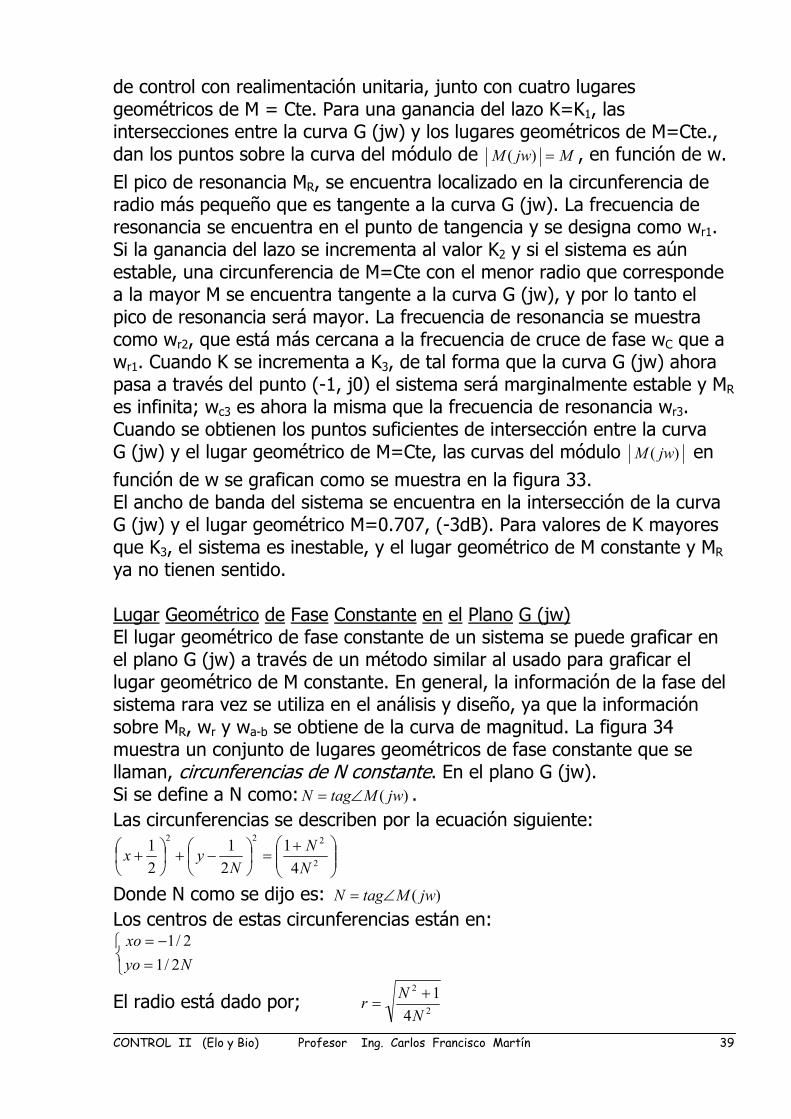
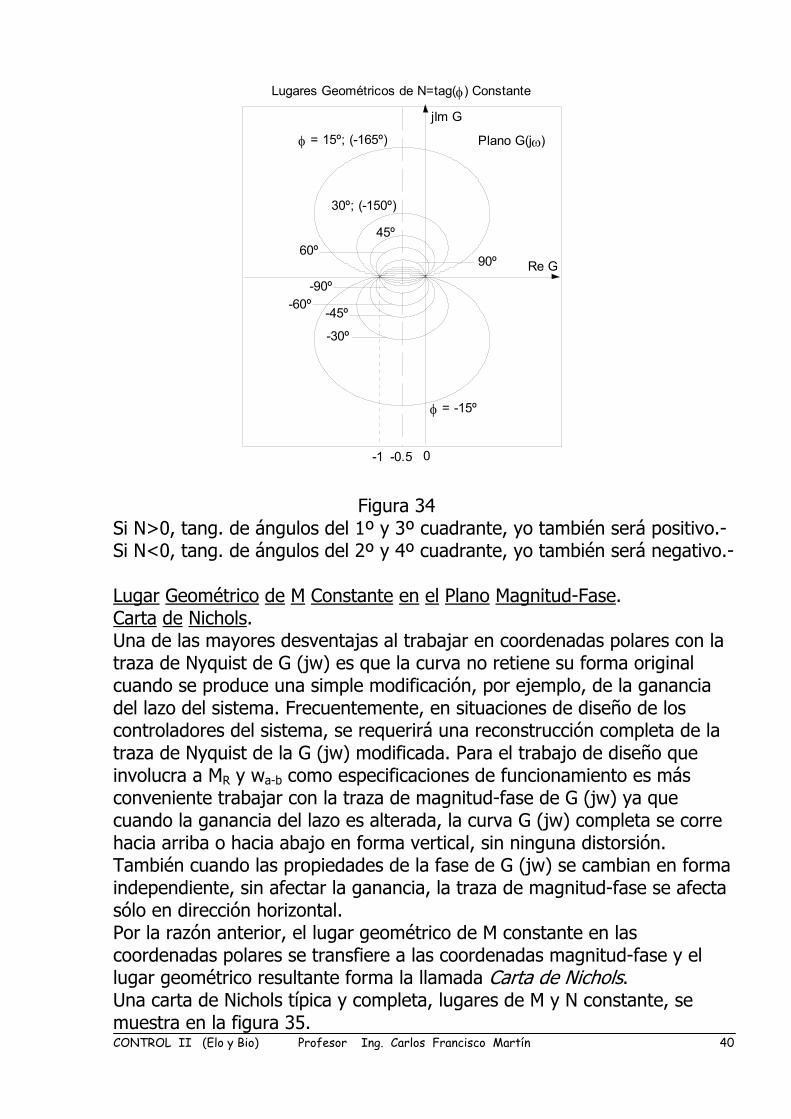
de control con realimentación unitaria, junto con cuatro lugares geométricos de M = Cte. Para una ganancia del lazo K=K1, las intersecciones entre la curva G (jw) y los lugares geométricos de M=Cte., dan los puntos sobre la curva del módulo de MjwM =)( , en función de w. El pico de resonancia MR, se encuentra localizado en la circunferencia de radio más pequeño que es tangente a la curva G (jw). La frecuencia de resonancia se encuentra en el punto de tangencia y se designa como wr1. Si la ganancia del lazo se incrementa al valor K2 y si el sistema es aún estable, una circunferencia de M=Cte con el menor radio que corresponde a la mayor M se encuentra tangente a la curva G (jw), y por lo tanto el pico de resonancia será mayor. La frecuencia de resonancia se muestra como wr2, que está más cercana a la frecuencia de cruce de fase wC que a wr1. Cuando K se incrementa a K3, de tal forma que la curva G (jw) ahora pasa a través del punto (-1, j0) el sistema será marginalmente estable y MR es infinita; wc3 es ahora la misma que la frecuencia de resonancia wr3. Cuando se obtienen los puntos suficientes de intersección entre la curva G (jw) y el lugar geométrico de M=Cte, las curvas del módulo )( jwM en función de w se grafican como se muestra en la figura 33. El ancho de banda del sistema se encuentra en la intersección de la curva G (jw) y el lugar geométrico M=0.707, (-3dB). Para valores de K mayores que K3, el sistema es inestable, y el lugar geométrico de M constante y MR ya no tienen sentido. Lugar Geométrico de Fase Constante en el Plano G (jw) El lugar geométrico de fase constante de un sistema se puede graficar en el plano G (jw) a través de un método similar al usado para graficar el lugar geométrico de M constante. En general, la información de la fase del sistema rara vez se utiliza en el análisis y diseño, ya que la información sobre MR, wr y wa-b se obtiene de la curva de magnitud. La figura 34 muestra un conjunto de lugares geométricos de fase constante que se llaman, circunferencias de N constante. En el plano G (jw). Si se define a N como: )( jwMtagN ∠= . Las circunferencias se describen por la ecuación siguiente:
+=
−+
+ 2
222
41
21
21
NN
Nyx
Donde N como se dijo es: )( jwMtagN ∠= Los centros de estas circunferencias están en:
=−=Nyo
xo2/1
2/1
El radio está dado por; 2
2
41
NNr +
=
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 40
Lugares Geométricos de N=tag(φ) Constante
jIm G
Re G
φ = -15º
-30º
-45º -60º
-90º
-0.5
φ = 15º; (-165º)
30º; (-150º)
45º 60º
90º
Plano G(jω)
-1 0
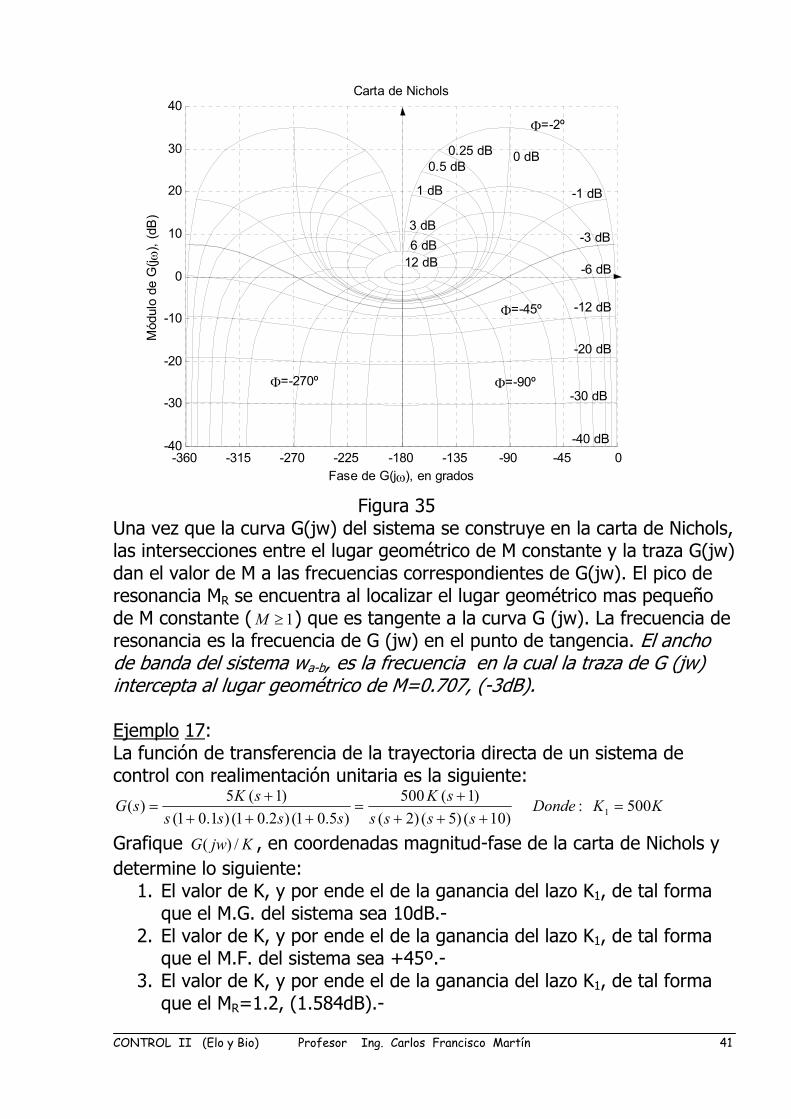
Figura 34 Si N>0, tang. de ángulos del 1º y 3º cuadrante, yo también será positivo.- Si N<0, tang. de ángulos del 2º y 4º cuadrante, yo también será negativo.- Lugar Geométrico de M Constante en el Plano Magnitud-Fase. Carta de Nichols. Una de las mayores desventajas al trabajar en coordenadas polares con la traza de Nyquist de G (jw) es que la curva no retiene su forma original cuando se produce una simple modificación, por ejemplo, de la ganancia del lazo del sistema. Frecuentemente, en situaciones de diseño de los controladores del sistema, se requerirá una reconstrucción completa de la traza de Nyquist de la G (jw) modificada. Para el trabajo de diseño que involucra a MR y wa-b como especificaciones de funcionamiento es más conveniente trabajar con la traza de magnitud-fase de G (jw) ya que cuando la ganancia del lazo es alterada, la curva G (jw) completa se corre hacia arriba o hacia abajo en forma vertical, sin ninguna distorsión. También cuando las propiedades de la fase de G (jw) se cambian en forma independiente, sin afectar la ganancia, la traza de magnitud-fase se afecta sólo en dirección horizontal. Por la razón anterior, el lugar geométrico de M constante en las coordenadas polares se transfiere a las coordenadas magnitud-fase y el lugar geométrico resultante forma la llamada Carta de Nichols. Una carta de Nichols típica y completa, lugares de M y N constante, se muestra en la figura 35.
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 41
-360 -315 -270 -225 -180 -135 -90 -45 0-40
-30
-20
-10
0
10
20
30
40
Fase de G(jω), en grados
Mód
ulo
de G
(j ω),
(dB
)
Carta de Nichols
6 dB3 dB
1 dB
0.5 dB0.25 dB 0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-40 dB
12 dB
-30 dB Φ=-90º
Φ=-45º
Φ=-270º
Φ=-2º
Figura 35 Una vez que la curva G(jw) del sistema se construye en la carta de Nichols, las intersecciones entre el lugar geométrico de M constante y la traza G(jw) dan el valor de M a las frecuencias correspondientes de G(jw). El pico de resonancia MR se encuentra al localizar el lugar geométrico mas pequeño de M constante ( 1≥M ) que es tangente a la curva G (jw). La frecuencia de resonancia es la frecuencia de G (jw) en el punto de tangencia. El ancho de banda del sistema wa-b, es la frecuencia en la cual la traza de G (jw) intercepta al lugar geométrico de M=0.707, (-3dB). Ejemplo 17: La función de transferencia de la trayectoria directa de un sistema de control con realimentación unitaria es la siguiente:
KKDondessss
sKssss
sKsG 500:)10()5()2(
)1(500)5.01()2.01()1.01(
)1(5)( 1 =++++
=+++
+=
Grafique KjwG /)( , en coordenadas magnitud-fase de la carta de Nichols y determine lo siguiente:
1. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma que el M.G. del sistema sea 10dB.-
2. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma que el M.F. del sistema sea +45º.-
3. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma que el MR=1.2, (1.584dB).-
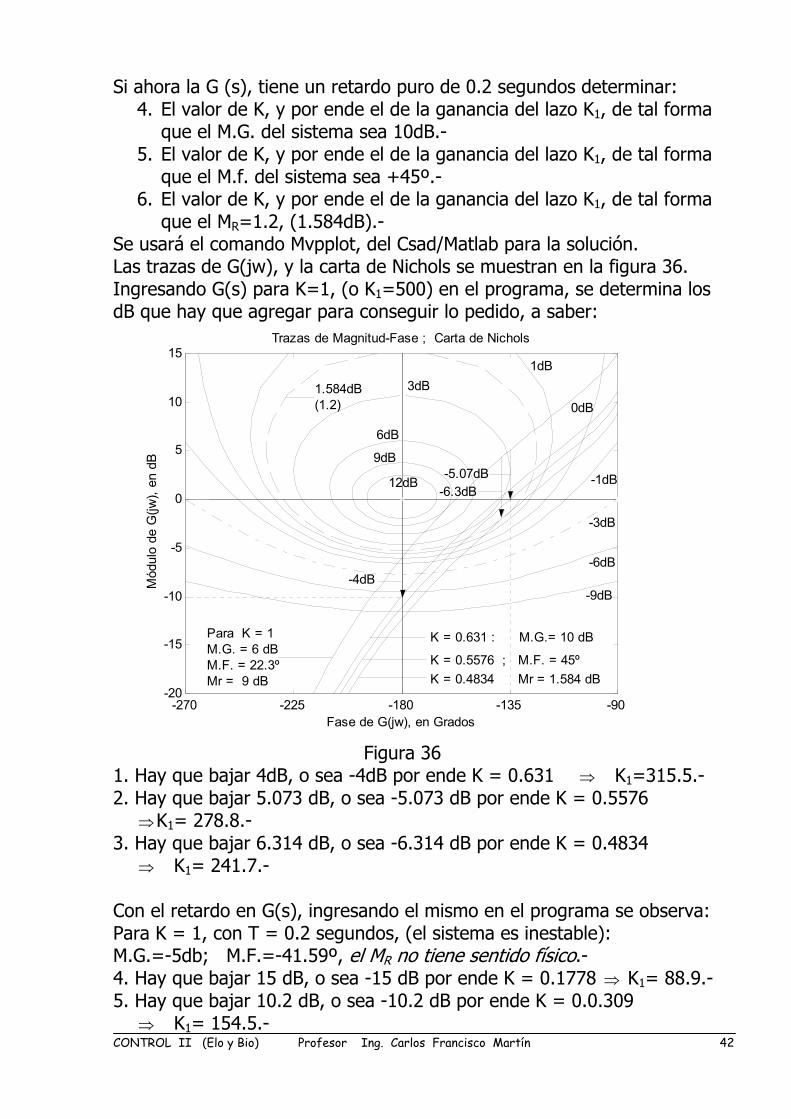
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 42
Si ahora la G (s), tiene un retardo puro de 0.2 segundos determinar: 4. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma
que el M.G. del sistema sea 10dB.- 5. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma
que el M.f. del sistema sea +45º.- 6. El valor de K, y por ende el de la ganancia del lazo K1, de tal forma
que el MR=1.2, (1.584dB).- Se usará el comando Mvpplot, del Csad/Matlab para la solución. Las trazas de G(jw), y la carta de Nichols se muestran en la figura 36. Ingresando G(s) para K=1, (o K1=500) en el programa, se determina los dB que hay que agregar para conseguir lo pedido, a saber:
-270 -225 -180 -135 -90-20
-15
-10
-5
0
5
10
15
Mód
ulo
de G
(jw),
en d
B
Fase de G(jw), en Grados
Trazas de Magnitud-Fase ; Carta de Nichols
K = 0.631 : M.G.= 10 dB
K = 0.5576 ; M.F. = 45º K = 0.4834 Mr = 1.584 dB
Para K = 1 M.G. = 6 dB M.F. = 22.3º Mr = 9 dB
12dB
9dB
6dB
3dB 1dB
0dB
-1dB
-3dB
-6dB
-9dB
1.584dB(1.2)
-4dB
-5.07dB -6.3dB
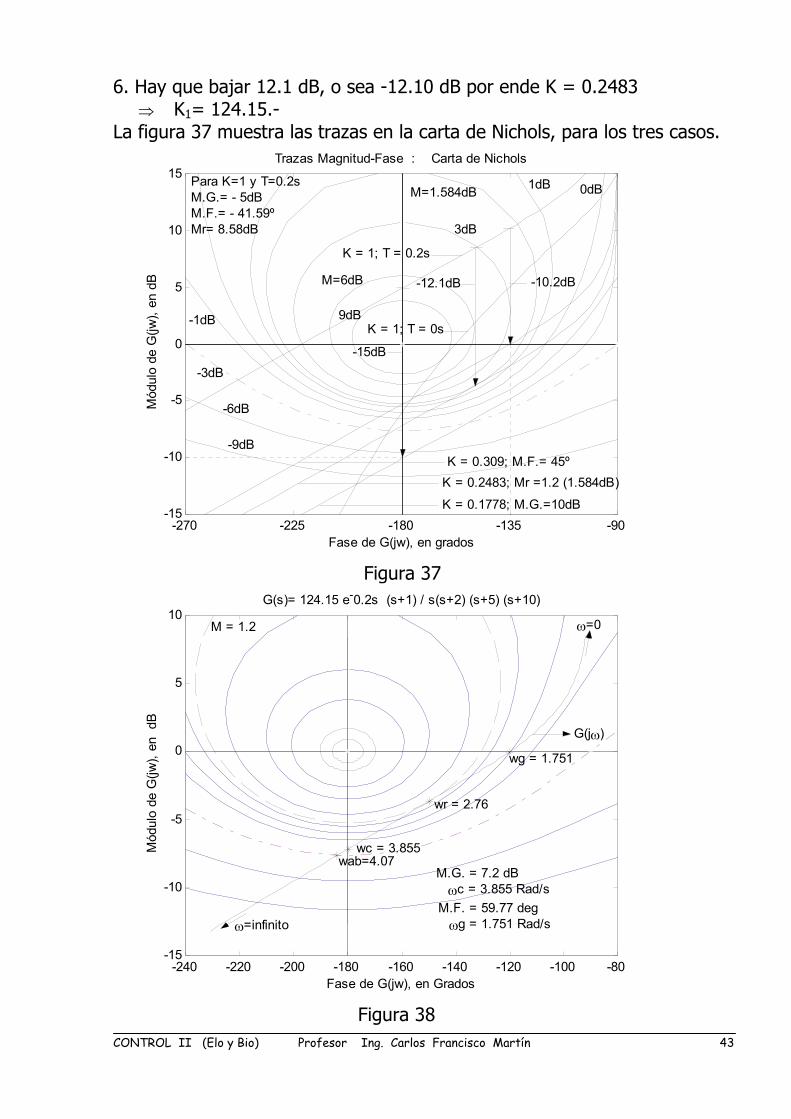
Figura 36 1. Hay que bajar 4dB, o sea -4dB por ende K = 0.631 ⇒ K1=315.5.- 2. Hay que bajar 5.073 dB, o sea -5.073 dB por ende K = 0.5576 ⇒K1= 278.8.- 3. Hay que bajar 6.314 dB, o sea -6.314 dB por ende K = 0.4834 ⇒ K1= 241.7.- Con el retardo en G(s), ingresando el mismo en el programa se observa: Para K = 1, con T = 0.2 segundos, (el sistema es inestable): M.G.=-5db; M.F.=-41.59º, el MR no tiene sentido físico.- 4. Hay que bajar 15 dB, o sea -15 dB por ende K = 0.1778 ⇒ K1= 88.9.- 5. Hay que bajar 10.2 dB, o sea -10.2 dB por ende K = 0.0.309 ⇒ K1= 154.5.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 43
6. Hay que bajar 12.1 dB, o sea -12.10 dB por ende K = 0.2483 ⇒ K1= 124.15.- La figura 37 muestra las trazas en la carta de Nichols, para los tres casos.
-270 -225 -180 -135 -90-15
-10
-5
0
5
10
15
Mód
ulo
de G
(jw),
en d
B
Fase de G(jw), en grados
Trazas Magnitud-Fase : Carta de Nichols
K = 1; T = 0.2s
K = 1; T = 0s
K = 0.1778; M.G.=10dB
K = 0.309; M.F.= 45º K = 0.2483; Mr =1.2 (1.584dB)
9dB
M=6dB
3dB
M=1.584dB 1dB 0dB
-1dB
-3dB
-6dB
-9dB
Para K=1 y T=0.2s M.G.= - 5dB M.F.= - 41.59º Mr= 8.58dB
-10.2dB -12.1dB
-15dB
Figura 37
-240 -220 -200 -180 -160 -140 -120 -100 -80-15
-10
-5
0
5
10
Mód
ulo
de G
(jw),
en d
B
Fase de G(jw), en Grados
wr = 2.76
G(s)= 124.15 e-0.2s (s+1) / s(s+2) (s+5) (s+10)
M.F. = 59.77 deg
wab=4.07
wg = 1.751
wc = 3.855
M.G. = 7.2 dBωc = 3.855 Rad/s
ωg = 1.751 Rad/s
M = 1.2
G(jω)
ω=infinito
ω=0
Figura 38
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 44
En la figura 38 se muestra la traza de G (jw) solo para el último caso, (ajuste de la ganancia para conseguir el MR pedido), junto con los atributos resultantes. Tanto en las figuras 36 y 37 como en la figura38, el lugar de M=1.2, se añadió con el comando de Matlab, Nichmag. Como estamos en la función mvpplot del Csad/Matlab, (para no salir de ella) se procedió en la forma siguiente: Mvpplot>! hold on, [M.F]=nichmag(20*log10(1.2)); plot(F,M,’k-’). La Carta de Nichols Aplicada a Sistemas de Realimentación no Unitaria El lugar geométrico de M constante y la carta de Nichols, que se han presentado están limitados a sistemas con realimentación unitaria. Cuya función de transferencia esta dada por.
)(1)()(sGsGsM
+=
Cuando el sistema tiene realimentación no unitaria, se tendrá que:
)()(1)()(sHsG
sGsM+
= ; Donde H(s)≠ 1
El lugar geométrico de M constante y la carta de Nichols no pueden aplicarse directamente para obtener la respuesta en frecuencia del sistema al graficar )()( jwHjwG , ya que el numerador de M(s) no contiene H (jw).- A través de una modificación adecuada, el lugar geométrico de M constante y la carta de Nichols aún se puede aplicar a sistemas con realimentación no unitaria. Al considerar la función:
)()(1)()()()()(sHsGsHsGsMsHsP
+== , y como M (jw) se puede poner:
)()(
)()(1)()(
)(1
)()(
)(/)(1
)()()(
jwHjwP
jwHjwGjwHjwG
jwHjwRjwB
jwCjwBjwRjwCjwM =
+×=×==
Como G(s) H(s) es la función de transferencia del camino directo del sistema normalizado de realimentación unitaria, el mismo a su vez está en serie con la función 1/H(s). El procedimiento seria el siguiente: La respuesta en frecuencia de P (jw) se puede determinar al graficar la función G (jw) H (jw) en coordenadas magnitud-fase superpuesta a la carta de Nichols. Una vez hecho esto, la información de la respuesta de frecuencia del sistema M (jw) se puede obtener como sigue:
El Módulo: )()(
)(jwHjwP
jwM =
Y la fase: )()()()( jwHjwPjwMjw ∠−∠=∠=Φ
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 45
Estudio de la Sensibilidad, (Robustez), en el Dominio de la Frecuencia El estudio de la sensibilidad o su inversa, la robustez, en el dominio de la frecuencia de los sistemas de control lineales tiene la ventaja que los sistemas de orden superior se pueden manejar mas fácilmente que en el dominio del tiempo. Aún más, la sensibilidad del sistema con respecto a las variaciones de sus parámetros, se pueden interpretar fácilmente empleando las trazas del dominio frecuencial. Se demostrara como se pueden emplear las trazas de Bode, Nyquist y la carta de Nichols para el análisis y diseño de sistemas de control basados en consideraciones de sensibilidad, o Robustez. Antes definiremos matemáticamente que es la sensibilidad. Puesto que los componentes que integran un sistema tienen propiedades que pueden cambiar, debido a envejecimiento, deterioros, averías y otros factores, no se podrán considerar los parámetros de un sistema de control, como completamente constantes durante toda la vida útil del sistema. Por ejemplo, la resistencia eléctrica del arrollamiento de un motor, cambia con la temperatura, (puede subir en demasía durante su funcionamiento). En general, un buen sistema de control debería ser diseñado para minimizar y si es posible anular los efectos de tales cambios, dicho de otra manera, ser insensible a estas variaciones. Se considerara que “x” sea un parámetro que puede variar, la sensibilidad de otro parámetro, o de una variable del sistema, “y” a la variación de “x” se definirá como:
yoxo
dxdyS
yoxo
xy
xoxyoy
S yx
yx =⇒
∆∆
=∆
∆
=
Donde: y∆ denota el cambio incremental, (absoluto), en “y”, debido al cambio incremental, (absoluto), x∆ en “x”.
xoxy
yoy ∆∆ , son los porcentajes de cambio en “y” e “x” respectivamente.
“ yo ” y “ xo ”, serían sus valores nominales.- Se considerara un sistema de control lineal con realimentación unitaria
1)( =sH y )()( 1 sKGsG = , descripto por la función de transferencia:
)(1)()(sGsGsM
+=
La 1)(
1)(//
11 =⇒×=== G
KGK S
sGsG
GK
dKdG
KdKGdGS
La sensibilidad de M(s) con respecto a la ganancia del lazo K, que es un factor multiplicativo en G(s), se define como:
)()(
)()(
)(/)()(/)()(
sMsG
sdGsdM
sGsdGsMsdMsS MG == (*)
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 46
Como:
22 ))(1(1
))(1(1)())(1(1
)()(
sGsGsGsG
sdGsdM
+=
+×−+×
= y ))(1()()( sGsMsG
+=
Remplazando en la ecuación (*), quedara:
)(11)(
)(11)(
jwGjwS
sGsS M
GMG +
=⇒+
=
Claramente, la función sensibilidad )(sS MG es una función de la variable compleja s. La última expresión esta en la forma adecuada para trabajar en el plano de Nyquist. La sensibilidad )(sS MG también se puede expresar:
)(/11)(/1)(sGsGsS MG +
= ⇒ )(/11
)(/1)(
jwGjwG
jwS MG +=
Expresión que está en la forma adecuada para utilizar la carta de Nichols y el plano [ ] 1)( −jwG . También se puede definir la función robustez como:
)(1)(
1)( sGsS
RosR MG
MG +===
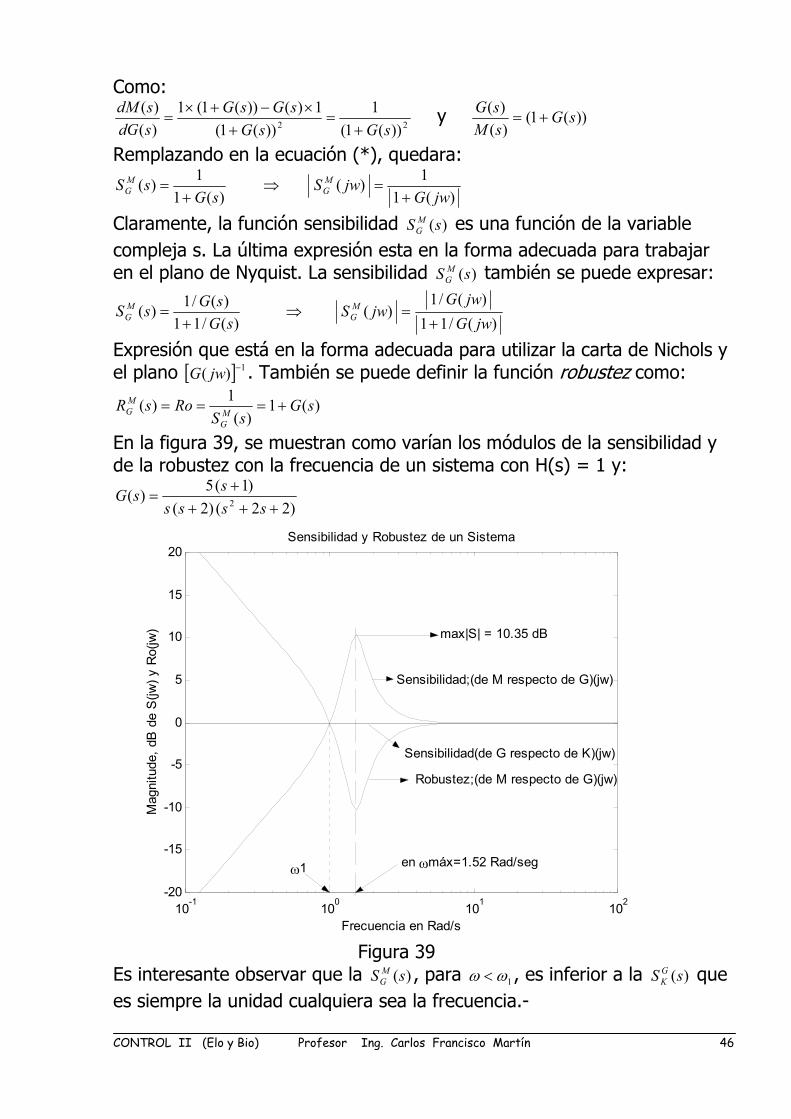
En la figura 39, se muestran como varían los módulos de la sensibilidad y de la robustez con la frecuencia de un sistema con H(s) = 1 y:
)22()2()1(5)( 2 +++
+=
ssssssG
10-1 100 101 102-20
-15
-10
-5
0
5
10
15
20
Mag
nitu
de, d
B d
e S
(jw) y
Ro(
jw)
Frecuencia en Rad/s
max|S| = 10.35 dB
Sensibilidad y Robustez de un Sistema
en ωmáx=1.52 Rad/seg
Robustez;(de M respecto de G)(jw)
Sensibilidad;(de M respecto de G)(jw)
Sensibilidad(de G respecto de K)(jw)
ω1
Figura 39 Es interesante observar que la )(sS MG , para 1ωω < , es inferior a la )(sS GK que es siempre la unidad cualquiera sea la frecuencia.-
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 47
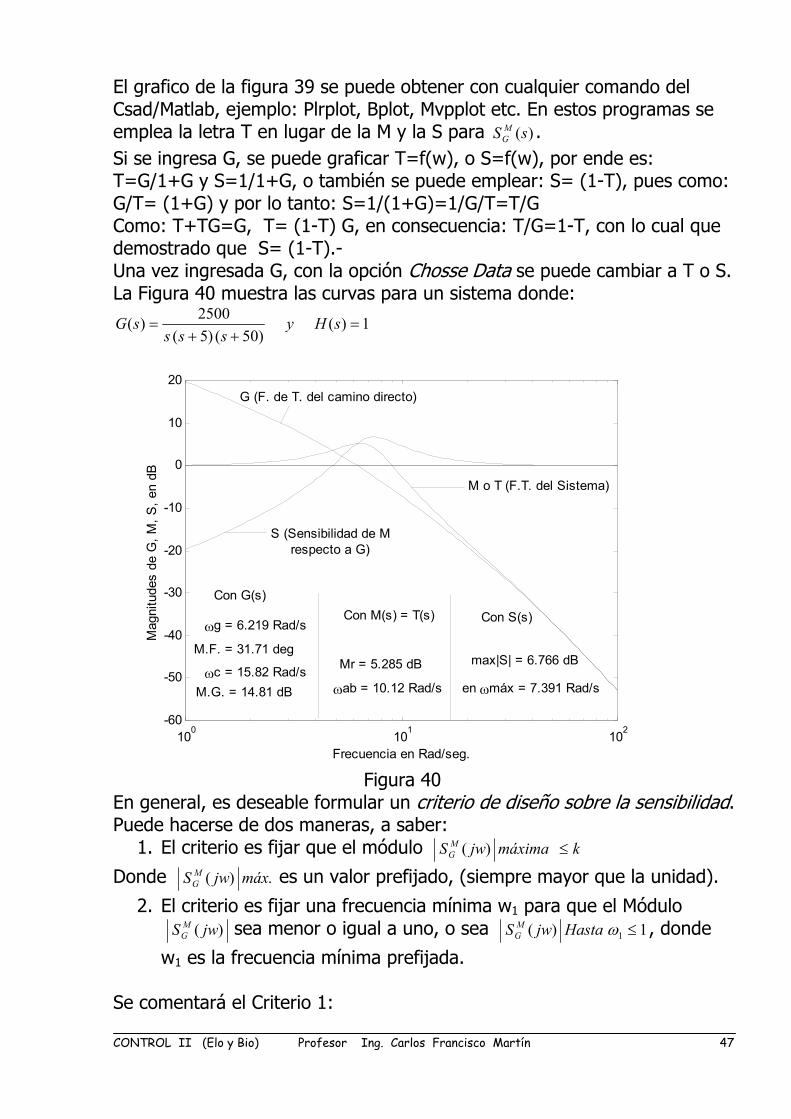
El grafico de la figura 39 se puede obtener con cualquier comando del Csad/Matlab, ejemplo: Plrplot, Bplot, Mvpplot etc. En estos programas se emplea la letra T en lugar de la M y la S para )(sS MG . Si se ingresa G, se puede graficar T=f(w), o S=f(w), por ende es: T=G/1+G y S=1/1+G, o también se puede emplear: S= (1-T), pues como: G/T= (1+G) y por lo tanto: S=1/(1+G)=1/G/T=T/G Como: T+TG=G, T= (1-T) G, en consecuencia: T/G=1-T, con lo cual que demostrado que S= (1-T).- Una vez ingresada G, con la opción Chosse Data se puede cambiar a T o S. La Figura 40 muestra las curvas para un sistema donde:
1)()50()5(
2500)( =++
= sHysss
sG
100 101 102-60
-50
-40
-30
-20
-10
0
10
20
Mag
nitu
des
de G
, M, S
, en
dB
Frecuencia en Rad/seg.
ωg = 6.219 Rad/s
M.F. = 31.71 deg
ωc = 15.82 Rad/sM.G. = 14.81 dB
max|S| = 6.766 dB
en ωmáx = 7.391 Rad/s
Mr = 5.285 dB
ωab = 10.12 Rad/s
Con G(s) Con M(s) = T(s) Con S(s)
S (Sensibilidad de M respecto a G)
G (F. de T. del camino directo)
M o T (F.T. del Sistema)
Figura 40 En general, es deseable formular un criterio de diseño sobre la sensibilidad. Puede hacerse de dos maneras, a saber:
1. El criterio es fijar que el módulo kmáximajwS MG ≤)(
Donde .)( máxjwS MG es un valor prefijado, (siempre mayor que la unidad).
2. El criterio es fijar una frecuencia mínima w1 para que el Módulo )( jwS MG sea menor o igual a uno, o sea 1)( 1 ≤ωHastajwS MG , donde
w1 es la frecuencia mínima prefijada. Se comentará el Criterio 1:
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 48
El criterio establece que: kjGjG
jGjS
máx
máx
máxmáx
MG ≤
+=
+=
)(/11)(/1
)(11)(
ωω
ωω
En ocasiones se puede usar, como se ya se comento, la llamada Robustez, que es la inversa de la sensibilidad, o sea:
kjwGRo 1)(1 ≥+= ; Donde k es un número real de manera que: 10 << Ro
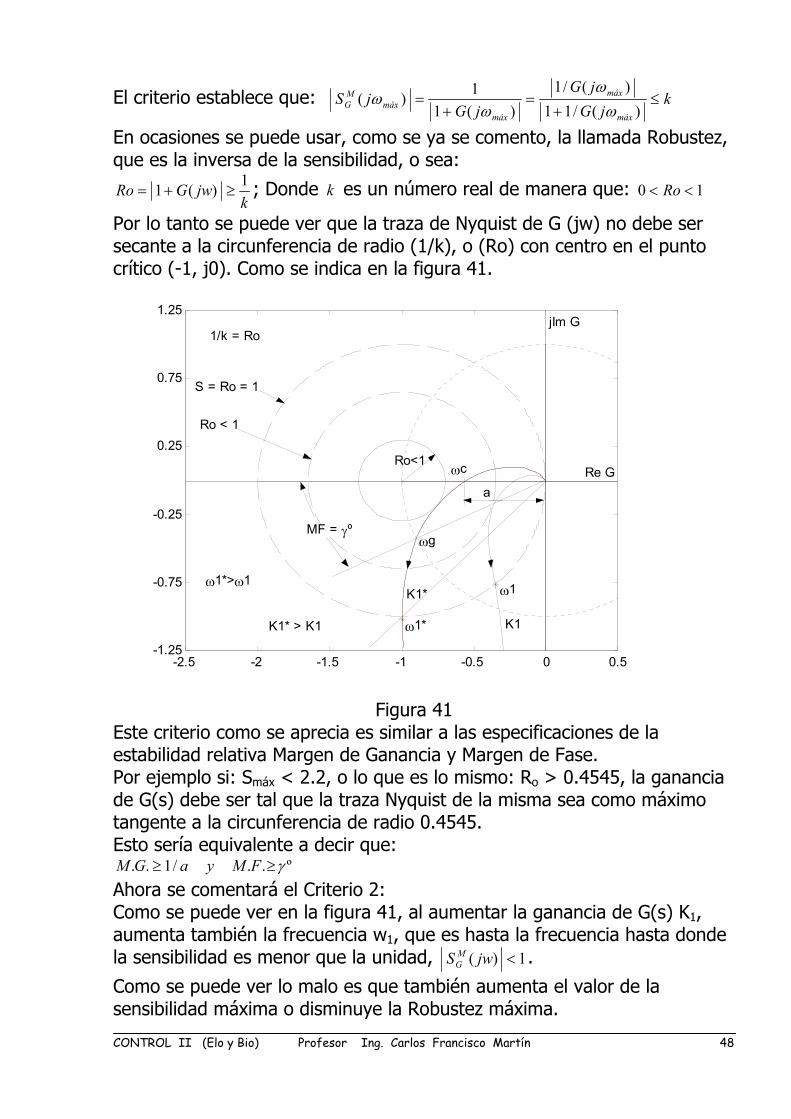
Por lo tanto se puede ver que la traza de Nyquist de G (jw) no debe ser secante a la circunferencia de radio (1/k), o (Ro) con centro en el punto crítico (-1, j0). Como se indica en la figura 41.
-2.5 -2 -1.5 -1 -0.5 0 0.5-1.25
-0.75
-0.25
0.25
0.75
1.25
Ro<1
ω1
ω1*
jIm G
Re G a
MF = γº
ω1*>ω1
ωc
1/k = Ro
S = Ro = 1
K1
K1*
K1* > K1
ωg
Ro < 1
Figura 41 Este criterio como se aprecia es similar a las especificaciones de la estabilidad relativa Margen de Ganancia y Margen de Fase. Por ejemplo si: Smáx < 2.2, o lo que es lo mismo: Ro > 0.4545, la ganancia de G(s) debe ser tal que la traza Nyquist de la misma sea como máximo tangente a la circunferencia de radio 0.4545. Esto sería equivalente a decir que:
º../1.. γ≥≥ FMyaGM Ahora se comentará el Criterio 2: Como se puede ver en la figura 41, al aumentar la ganancia de G(s) K1, aumenta también la frecuencia w1, que es hasta la frecuencia hasta donde la sensibilidad es menor que la unidad, 1)( <jwS MG .
Como se puede ver lo malo es que también aumenta el valor de la sensibilidad máxima o disminuye la Robustez máxima.
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 49
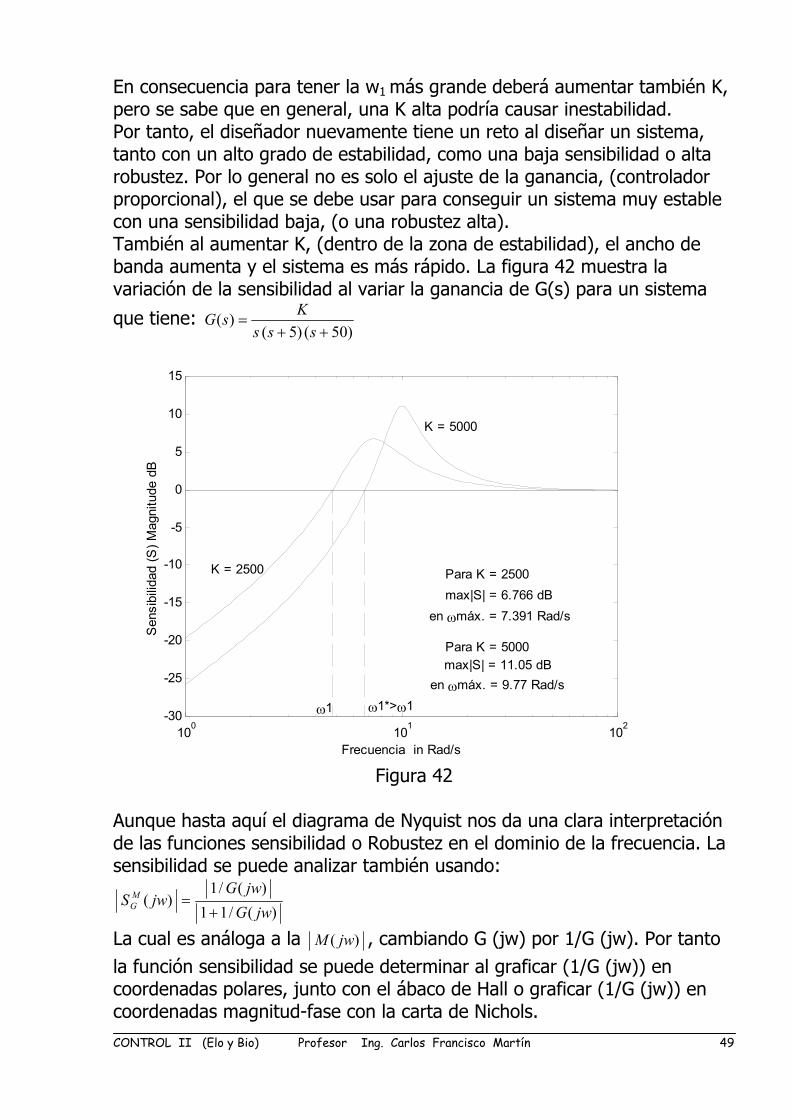
En consecuencia para tener la w1 más grande deberá aumentar también K, pero se sabe que en general, una K alta podría causar inestabilidad. Por tanto, el diseñador nuevamente tiene un reto al diseñar un sistema, tanto con un alto grado de estabilidad, como una baja sensibilidad o alta robustez. Por lo general no es solo el ajuste de la ganancia, (controlador proporcional), el que se debe usar para conseguir un sistema muy estable con una sensibilidad baja, (o una robustez alta). También al aumentar K, (dentro de la zona de estabilidad), el ancho de banda aumenta y el sistema es más rápido. La figura 42 muestra la variación de la sensibilidad al variar la ganancia de G(s) para un sistema
que tiene: )50()5(
)(++
=sss
KsG
100 101 102-30
-25
-20
-15
-10
-5
0
5
10
15
Sen
sibi
lidad
(S) M
agni
tude
dB
Frecuencia in Rad/s
max|S| = 6.766 dBen ωmáx. = 7.391 Rad/s
max|S| = 11.05 dBen ωmáx. = 9.77 Rad/s
Para K = 2500
Para K = 5000
K = 5000
K = 2500
ω1 ω1*>ω1
Figura 42 Aunque hasta aquí el diagrama de Nyquist nos da una clara interpretación de las funciones sensibilidad o Robustez en el dominio de la frecuencia. La sensibilidad se puede analizar también usando:
)(/11)(/1
)(jwGjwG
jwS MG +=
La cual es análoga a la )( jwM , cambiando G (jw) por 1/G (jw). Por tanto la función sensibilidad se puede determinar al graficar (1/G (jw)) en coordenadas polares, junto con el ábaco de Hall o graficar (1/G (jw)) en coordenadas magnitud-fase con la carta de Nichols.
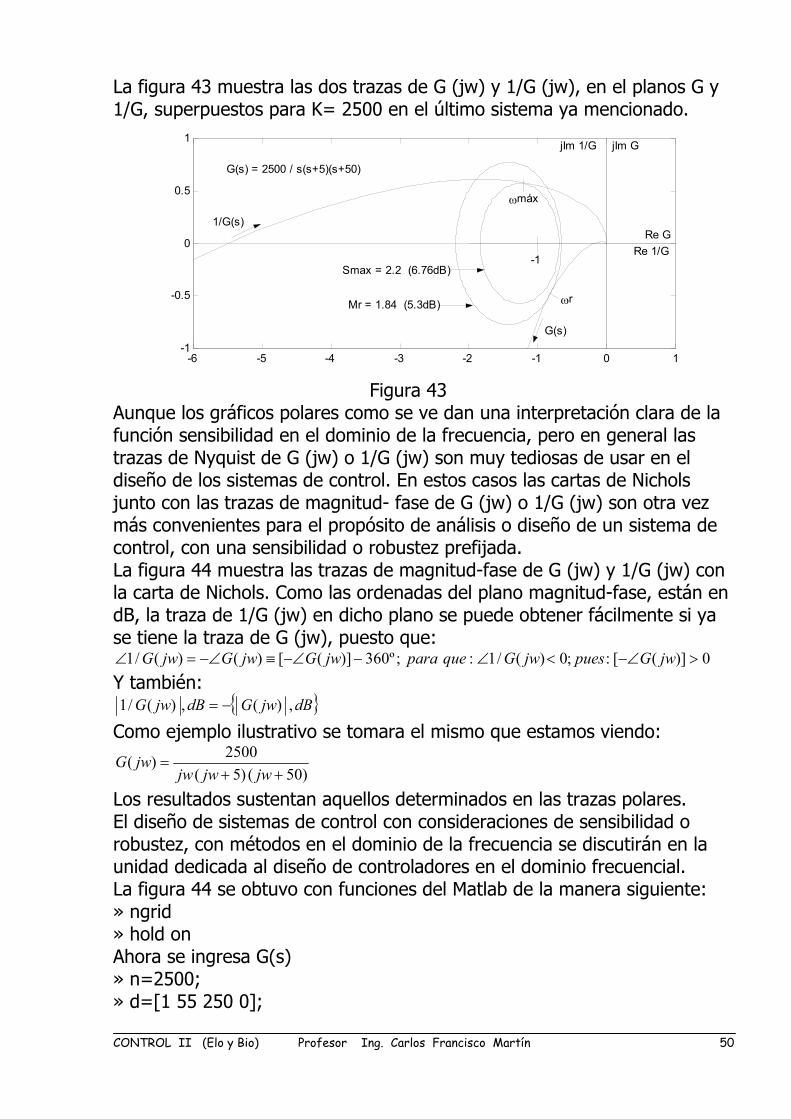
CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 50
La figura 43 muestra las dos trazas de G (jw) y 1/G (jw), en el planos G y 1/G, superpuestos para K= 2500 en el último sistema ya mencionado.
-6 -5 -4 -3 -2 -1 0 1-1
-0.5
0
0.5
1jIm G jIm 1/G
Re G Re 1/G
1/G(s)
G(s)
ωmáx
ωr
-1 Smax = 2.2 (6.76dB)
Mr = 1.84 (5.3dB)
G(s) = 2500 / s(s+5)(s+50)
Figura 43 Aunque los gráficos polares como se ve dan una interpretación clara de la función sensibilidad en el dominio de la frecuencia, pero en general las trazas de Nyquist de G (jw) o 1/G (jw) son muy tediosas de usar en el diseño de los sistemas de control. En estos casos las cartas de Nichols junto con las trazas de magnitud- fase de G (jw) o 1/G (jw) son otra vez más convenientes para el propósito de análisis o diseño de un sistema de control, con una sensibilidad o robustez prefijada. La figura 44 muestra las trazas de magnitud-fase de G (jw) y 1/G (jw) con la carta de Nichols. Como las ordenadas del plano magnitud-fase, están en dB, la traza de 1/G (jw) en dicho plano se puede obtener fácilmente si ya se tiene la traza de G (jw), puesto que:
0)]([:;0)(/1:;º360)]([)()(/1 >−∠<∠−−∠≡−∠=∠ jwGpuesjwGqueparajwGjwGjwG Y también:
{ }dBjwGdBjwG ,)(,)(/1 −= Como ejemplo ilustrativo se tomara el mismo que estamos viendo:
)50()5(2500)(
++=
jwjwjwjwG
Los resultados sustentan aquellos determinados en las trazas polares. El diseño de sistemas de control con consideraciones de sensibilidad o robustez, con métodos en el dominio de la frecuencia se discutirán en la unidad dedicada al diseño de controladores en el dominio frecuencial. La figura 44 se obtuvo con funciones del Matlab de la manera siguiente: » ngrid » hold on Ahora se ingresa G(s) » n=2500; » d=[1 55 250 0];

CONTROL II (Elo y Bio) Profesor Ing. Carlos Francisco Martín 51
Ahora se grafica la traza de 1/G(s) de la forma siguiente: » [M,F,W]=nichols(d,n); » M1=20*log10(M); » F1=F-360; » plot(F1,M1); Ahora se grafica la traza de G(s) » Nichols(n, d) Se arregla el grafico con el zoom, por ejemplo (-40dB, 40dB) en ordenadas y (-270,-90º) en abscisas. Se pueden agregar los lugares geométricos de M=Cte., M=5.1054dB y M=6.8484dB para Mr y Smáx respectivamente. » [M,F]=nichmag(5.10545);plot(F,M,'k-') » [M,F]=nichmag(6.84845);plot(F,M,'k-') El grafico final es el de la figura 44.
-270 -225 -180 -135 -90-40
-30
-20
-10
0
10
20
30
40
Fase de G(jw) y 1/G(jw); en grados
0 dB
0.25 dB0.5 dB
1 dB
3 dB6 dB
Carta de Nichols
Mód
ulo
de G
(jw) y
1/G
(jw),
en d
B
Mr=1.84 o +5.3dB
Smáx.=2.18 o 8.76dB
1/G(s) G(s)
Figura 44

















