157
UNIVERSIDAD DE SEVILLA PFC: Análisis modal de una placa cuadrada. Teórico, numérico y experimental Sara Couso Páez Enero 2014

UNIVERSIDAD DE SEVILLA
PFC: Análisis modal de
una placa cuadrada. Teórico, numérico y experimental
Sara Couso Páez
Enero 2014
PFC: Análisis modal de una placa cuadrada.
1
Índice 1. MOTIVACIÓN Y OBJETIVOS ....................................................................................................... 3
2. INTRODUCCIÓN TEÓRICA .......................................................................................................... 4
2.1. Análisis modal .................................................................................................................... 4
2.1.1. Introducción ................................................................................................................ 4
2.1.2. Análisis modal teórico ................................................................................................. 4
2.1.3. Análisis modal experimental ..................................................................................... 18
2.2. Teoría de placas ............................................................................................................... 25
2.2.1. Introducción ............................................................................................................. 25
2.2.2. Ecuación diferencial de la flexión de placas ............................................................. 26
2.2.3. Solución de la ecuación diferencial .......................................................................... 30
2.2.3.1. Método de Navier ................................................................................................. 31
2.2.3.2. Método de Levy ...................................................................................................... 33
2.2.3.3. Método de la energía o método de Ritz ................................................................ 36
3. APLICACIÓN PRÁCTICA ............................................................................................................ 38
3.1. Métodos semi-analíticos .................................................................................................. 38
3.1.1. Placa empotrada en el centro. Método de Ritz. ....................................................... 39
3.1.2. Placa empotrada en el centro. Formulación acústica. .............................................. 47
3.1.3. Placa con las esquinas simplemente apoyadas ......................................................... 55
3.2. Métodos numéricos ........................................................................................................ 62
3.2.1. Introducción ............................................................................................................. 62
3.2.2. Procedimiento de resolución usando el MEF ............................................................ 64
3.2.3. Aplicación práctica .................................................................................................... 65
3.3. Métodos experimentales ................................................................................................ 72
3.3.1. Introducción .............................................................................................................. 72
3.3.2. Ensayo con Pimento® y TestLab® ........................................................................ 73
3.3.3. Ensayos con la mesa de vibraciones ......................................................................... 89
4. DISCUSIONES Y CONCLUSIONES ............................................................................................ 100
4.1. Comparación de resultados ........................................................................................... 100
4.1.1 Comparación entre métodos semi-analítico y numérico ......................................... 100
4.1.2. Comparación entre métodos experimental (Pimento® y Testlab®) y numérico ...... 104
4.1.3. Comparación entre métodos experimental (mesa de vibraciones) y numérico ..... 108
4.2. Conclusiones................................................................................................................... 112
ANEXO A. MANUAL BÁSICO DE USO DE LA MESA DE VIBRACIONES ........................................ 114

PFC: Análisis modal de una placa cuadrada.
2
ANEXO B.PROGRAMAS DE MATLAB® ........................................................................................ 147
REFERENCIAS ............................................................................................................................. 154

PFC: Análisis modal de una placa cuadrada.
3
1. MOTIVACIÓN Y OBJETIVOS
El objetivo del presente proyecto es la obtención de las frecuencias naturales y modos de
vibración de una placa cuadrada de acero galvanizado de dimensiones 0.3x0.3x0.001m3
sometido a dos condiciones de contorno puntuales diferentes mediante métodos analíticos,
numéricos y experimentales. Las condiciones de contorno serán empotrada en el punto central
y apoyada en las cuatro esquinas.
Como se ha mencionado, se va a realizar un estudio modal semi-analítico, numérico y
experimental. Con esto se quiere llegar a los mismos resultados y, por tanto, validar los tres
métodos para posibles estudios futuros de otros objetos o estructuras. De esta forma, al
realizar análisis modales con un solo método se tendría la seguridad de que los resultados son
correctos.
Las frecuencias naturales y modos de vibración se dan en todas las estructuras, mecanismos y
sistemas que un ingeniero diseña [1]. Como ingeniero, es necesario identificar estas
frecuencias y saber cómo pueden afectar a la respuesta del sistema cuando una fuerza es
aplicada. Conocer los modos de vibración, es decir, de qué forma vibrará la estructura cuando
es excitada, ayuda a los ingenieros a diseñar mejores mecanismos. El análisis modal es usado
para diseñar todo tipo de estructuras en la industria del automóvil, aeronáutica, ordenadores,
etc.
Si no se conociesen estas frecuencias y modos, podrían ocurrir catástrofes, como fue el caso
del puente de Tacoma Narrows en 1940. El viento que soplaba aquel día, cuya frecuencia
igualó a una frecuencia natural del puente, provocó el colapso estructural del mismo, tal y
como puede verse en la siguiente fotografía [2].
Figura 1.1 Colapso estructural del puente Tacoma Narrows

PFC: Análisis modal de una placa cuadrada.
4
2. INTRODUCCIÓN TEÓRICA
2.1. Análisis modal
2.1.1. Introducción
El análisis modal se utiliza para determinar las características dinámicas de una estructura:
modos de vibración, frecuencias naturales y relaciones de amortiguamiento. Hay dos tipos de
análisis modal: teórico y experimental. La forma teórica del análisis modal consiste en plantear
la ecuación del movimiento, suponer una forma de la respuesta e imponer que esta cumpla la
ecuación que gobierna el movimiento del sistema, lo que supone resolver un problema de
autovalores y autovectores. Dicho problema puede ser un proceso largo en el caso de tratar un
sistema de varios grados de libertad ya que para obtener la ecuación de movimiento es
necesario calcular las matrices de masa y rigidez y los factores de amortiguamiento. Por el
contrario, para el análisis modal experimental no es preciso el cálculo de estas matrices, sino
que se parte de un ensayo en el que se conoce la fuerza de excitación y se lleva a cabo un
algoritmo que permite extraer los parámetros modales.
Antes de seguir, es necesario explicar el concepto de grado de libertad [3]. Los grados de
libertad de un sólido rígido son el mínimo número de coordenadas necesarias para localizar
este cuerpo en el espacio. El número de grados de libertad para un sólido rígido libre es seis:
tres grados de traslación (x, y, z) para localizar el centro de gravedad y tres de rotación (θx, θy,
θz) para definir su orientación.
Ya que toda estructura deformable se puede considerar como una combinación de un número
infinito de sólidos rígidos, todas las estructuras tienen infinitos grados de libertad. Sin
embargo, estas estructuras pueden aproximarse como una combinación de un número
limitado de estos sólidos, generando un número finito de grados de libertad, N. Este número
también define las dimensiones de las matrices de masa, amortiguación y rigidez y el número
de frecuencias naturales y modos de vibración.
2.1.2. Análisis modal teórico
El análisis modal teórico se basa en el planteamiento de la ecuación de movimiento del
sistema. Para ello es preciso conocer la masa, el amortiguamiento y la rigidez del mismo. Una
vez planteada esta ecuación, se supone una respuesta del sistema en función de la frecuencia
natural para, mediante la sustitución y la transformación de las ecuaciones al dominio de
Laplace, obtener las frecuencias naturales y los modos de vibración.

PFC: Análisis modal de una placa cuadrada.
5
En el caso de vibraciones libres, se tendrá un sistema de ecuaciones homogéneas, de cuya
solución se obtendrá un número de frecuencias naturales igual al de grados de libertad del
sistema mecánico. Como se verá posteriormente, los sistemas tienden a vibrar libremente a las
frecuencias naturales, y a cada una de estas frecuencias el sistema vibrará con una deformada
determinada. A esas deformadas se les denomina modos naturales de vibración. Dependiendo
de las condiciones iniciales, el sistema vibrará a una u otra frecuencia natural, y, por tanto, con
una u otra configuración. También puede ocurrir, y es lo más frecuente, que las condiciones
iniciales sean tales que el sistema tienda a vibrar con varias frecuencias naturales
simultáneamente y con una deformada que sea combinación de los modos naturales de
vibración.
Para este tipo de estudios es preciso plantear una serie de hipótesis básicas, que son:
• Linealidad: el comportamiento de una estructura dinámica es lineal, es decir, la salida
de cualquier combinación de entradas es igual a la misma combinación de las
respectivas salidas. Esto implica que la dinámica puede ser representada por un
conjunto de ecuaciones lineales diferenciales de segundo orden.
• Independencia del tiempo: las características de la estructura dinámica no cambian
con el tiempo. Por tanto, los coeficientes de las ecuaciones diferenciales son
constantes e invariables con este parámetro.
• Observabilidad: es una propiedad del estado de un sistema que puede ser
determinada por alguna secuencia de operaciones físicas, es decir, dicha propiedad
puede ser medida [4].
También se asume que la estructura u objeto obedece el principio de reciprocidad de Maxwell
[5]: en un sólido elástico, el trabajo realizado por un sistema de cargas F para los
desplazamientos resultantes de aplicar otro sistema de cargas G distinto es idéntico al trabajo
realizado por el sistema de cargas G para los desplazamientos resultantes de aplicar el sistema
de cargas F. Esto significa que las matrices de masa, amortiguamiento y rigidez son simétricas.
Se empezará estudiando el caso de un sistema de un grado de libertad para después ampliarlo
a un sistema de N grados de libertad.

PFC: Análisis modal de una placa cuadrada.
6
2.1.2.1. Modelo de 1 grado de libertad
El sistema de un grado de libertad es el más sencillo para ilustrar muchos de los conceptos
relacionados con las vibraciones [6]. En la siguiente figura se muestra un esquema de este
sistema. Se compone de una masa m, de un amortiguador c, de un muelle o resorte k y de una
fuerza de excitación f(t).
Figura 2.1 Elementos de un sistema de 1 grado de libertad
La ecuación general que describe el movimiento de este sistema de un grado de libertad es:
��� + ��� + �� = �� (2.1)
donde �, �� y �� son el desplazamiento, la velocidad y la aceleración de la masa �
respectivamente.
Se va a proceder a explicar diversos casos de estudio para diferentes valores del
amortiguamiento y de la fuerza.
− Caso de vibración libre sin amortiguamiento
Si el amortiguamiento fuese cero (c=0), el problema sería sencillo de resolver. Si además se
tratase de un caso de vibración libre, es decir, si el vector de fuerzas fuese nulo (F=0), la
ecuación quedaría, ��� + �� = 0 (2.2)
teniendo una solución general de la forma ��� = �����. Introduciendo esta solución en la
ecuación 2.2, se obtiene la frecuencia natural de este sistema:
−��� + ������� = 0 → −��� + � = 0 →

PFC: Análisis modal de una placa cuadrada.
7
�� = � �� (2.3)
definiéndose �� como la frecuencia natural no amortiguada.
La solución general tendrá la forma:
��� = ���� ��� (2.4)
− Caso de vibración forzada sin amortiguamiento
Si se considera una excitación de la forma �� = ����� y se introduce en la ecuación 2.2, se
puede calcular la función de respuesta en frecuencia, H(ω). Esta se define como el cociente
entre la respuesta del sistema y la fuerza aplicada al mismo.
−��� + ������� = ����� → −��� + ��� = � →
��� = ! = "�#�$�� (2.5)
− Caso de vibración libre con amortiguamiento
Considerando ahora el caso de amortiguamiento viscoso y vibración libre (F=0), se tiene:
��� + ��� + �� = 0 (2.6)
La solución de esta ecuación es de la forma ��� = �����. Introduciendo esta ecuación en 2.6
se obtienen los valores de ω:
−��� + %�� + ������� = 0 → −��� + %�� + � = 0 →
�",� = '��� ± √*��#'$�� = ��+% ± ��,1 − +� (2.7)
En la ecuación 2.7 aparece un nuevo término, +. A este se le denomina relación de
amortiguamiento y se define como:
+ = '�√�� (2.8)
La respuesta del sistema quedará, por tanto:
��� = ��#�./���0�.,"#/$1� (2.9)

PFC: Análisis modal de una placa cuadrada.
8
Esta solución está compuesta de una parte real con un coeficiente ��+ y otra parte oscilatoria
que está amortiguada con una frecuencia �2 = ��,1 − +�. A la frecuencia �2 se le denomina
frecuencia natural amortiguada.
− Caso de vibración forzada con amortiguamiento
Si se considera la respuesta forzada �� = ����� , se supone que la respuesta será de la
forma ��� = ����� y se pasa del dominio del tiempo al dominio de Laplace asumiendo
desplazamiento y velocidad nulos (x=0; ��=0), entonces se puede calcular la función de
respuesta en frecuencia introduciendo estas expresiones en la ecuación 2.1:
−��� + %�� + ������� = ����� → −��� + %�� + ��� = � →
��� = ! = "�#�$��3��' (2.10)
El denominador de la ecuación 2.10 es la ecuación característica del sistema, y sus raíces o
polos son:
4",� = − � 2�6 ± �7� 2�6 8� − � �6 (2.11)
Se define el amortiguamiento crítico como el valor del amortiguamiento que hace que el
término dentro de la raíz de la ecuación 2.11 sea cero:
�' = 2��� �6 = 2��� (2.12)
Por consiguiente, la relación de amortiguamiento ζ se puede expresar como:
+ = '�√�� = � �'6 = � 2���6 (2.13)
Dependiendo del valor de la relación de amortiguamiento los sistemas se clasifican como
sobre-amortiguados (ζ>1), críticamente amortiguados (ζ=1) o sub-amortiguados (ζ<1). La
respuesta de los sistemas sobre-amortiguados es de tipo no oscilatorio, al igual que los
sistemas con amortiguamiento crítico. La respuesta de los sistemas sub-amortiguados es una
oscilación que decae. Para sistemas reales la relación de amortiguamiento es raramente mayor
del 10% (0.1), a menos que el sistema contenga algún mecanismo con amortiguación activa.
Por tanto, solo se considerarán los sistemas sub-amortiguados, que darán dos raíces complejas
conjugadas en la ecuación 2.11: 4" = 9" + :�2 4"∗ = 9" − :�2 (2.14)

PFC: Análisis modal de una placa cuadrada.
9
donde 9" es el factor de amortiguamiento (9" = −+��).
2.1.2.2. Modelo de N grados de libertad
Hasta ahora se ha analizado el comportamiento de los sistemas de un grado de libertad. Se ha
visto que muchos sistemas reales se pueden modelar con buena aproximación mediante
sistemas de un sólo grado de libertad. Sin embargo, hay casos en que esto no es posible. Por
ejemplo, en los sistemas formados por varios sólidos rígidos unidos por elementos elásticos,
como los mostrados en la figura 2.2; o también sistemas continuos con geometría compleja o
con una distribución y frecuencia de las cargas aplicadas concreta, como los que se muestran
en la figura 2.3. En esos casos, el estudio del comportamiento de los sistemas no puede
hacerse con modelos tan simples como los de un grado de libertad utilizados hasta ahora, sino
que debe emplearse un número más alto de grados de libertad.
Figura 2.2 Sistemas formados por varios sólidos rígidos unidos por elementos elásticos
Figura 2.3 Sistemas continuos
El comportamiento de los sistemas lineales con un número finito de grados de libertad puede
representarse mediante un sistema de ecuaciones diferenciales lineales de segundo orden. El
número de ecuaciones será igual al de grados de libertad del sistema.
F t1( )
F t2( )
F t1( )F t2( )
PFC: Análisis modal de una placa cuadrada.
10
Las ecuaciones de movimiento que gobiernan a un sistema de N grados de libertad se pueden
escribir de forma matricial de la siguiente manera [7]:
<=� �� + >=� �� + ?=�� = @�� (2.15)
donde M, C y K son las matrices de masa, amortiguamiento y rigidez, todas de dimensiones
NxN, y x(t) y f(t) son los vectores de desplazamiento y fuerza, ambos de dimensiones Nx1.
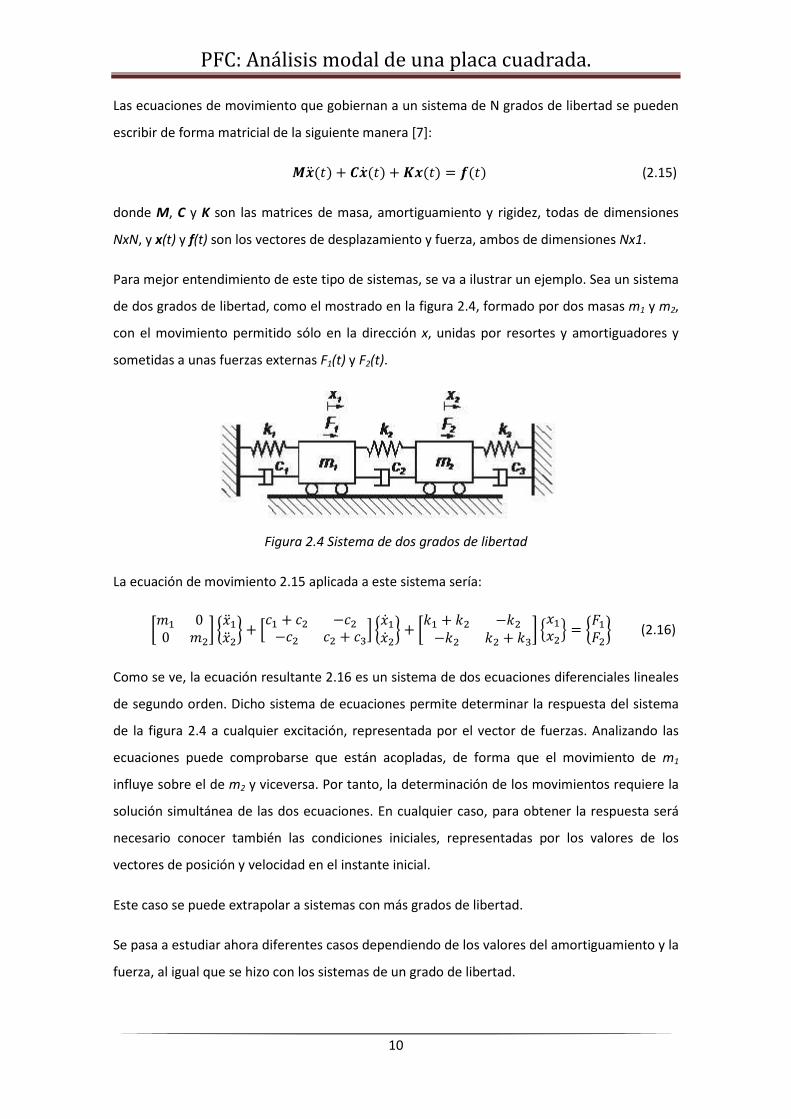
Para mejor entendimiento de este tipo de sistemas, se va a ilustrar un ejemplo. Sea un sistema
de dos grados de libertad, como el mostrado en la figura 2.4, formado por dos masas m1 y m2,
con el movimiento permitido sólo en la dirección x, unidas por resortes y amortiguadores y
sometidas a unas fuerzas externas F1(t) y F2(t).
Figura 2.4 Sistema de dos grados de libertad
La ecuación de movimiento 2.15 aplicada a este sistema sería:
A�" 00 ��B C��"���D + E�" + �� −��−�� �� + �FG C��"���D + A�" + �� −��−�� �� + �FB H�"��I = C�"��D (2.16)
Como se ve, la ecuación resultante 2.16 es un sistema de dos ecuaciones diferenciales lineales
de segundo orden. Dicho sistema de ecuaciones permite determinar la respuesta del sistema
de la figura 2.4 a cualquier excitación, representada por el vector de fuerzas. Analizando las
ecuaciones puede comprobarse que están acopladas, de forma que el movimiento de m1
influye sobre el de m2 y viceversa. Por tanto, la determinación de los movimientos requiere la
solución simultánea de las dos ecuaciones. En cualquier caso, para obtener la respuesta será
necesario conocer también las condiciones iniciales, representadas por los valores de los
vectores de posición y velocidad en el instante inicial.
Este caso se puede extrapolar a sistemas con más grados de libertad.
Se pasa a estudiar ahora diferentes casos dependiendo de los valores del amortiguamiento y la
fuerza, al igual que se hizo con los sistemas de un grado de libertad.

PFC: Análisis modal de una placa cuadrada.
11
− Caso de vibración libre sin amortiguamiento
Se considera en primer lugar, al igual que en el modelo de un grado de libertad, el caso de
respuesta libre sin amortiguamiento. Se supone que la solución es de la forma =�� = J����,
donde X es un vector compuesto por K�1 amplitudes independientes del tiempo [8]. La
ecuación de movimiento será:
<=� �� + ?=�� = L (2.17)
Sustituyendo en esta ecuación la expresión de la solución se llega a:
? − ��<�J��M� = L → ? − ��<�J = L
<#"? − ��N�J = L (2.18)
La ecuación 2.18 representa un problema de autovalores, con un número de autovalores ωj
igual al número de ecuaciones del sistema, y un autovector Xj asociado a cada autovalor.
Puede comprobarse que, si las matrices M y K son simétricas y definidas positivas, los
autovalores serán todos positivos, y que, si K es semidefinida positiva, los autovalores serán
iguales o mayor que cero.
Las soluciones de las ecuación 2.18 diferentes de la trivial satisfacen det|? − ��<| = 0. De
esta expresión se obtienen los N valores de ωj ,que son las frecuencias naturales no
amortiguadas del sistema.
��S = �TUVU (2.19)
Para calcular los autovalores Xj solo habrá que sustituir los valores de los autovalores
obtenidos en la ecuación 2.18.
La solución general será combinación de la siguiente respuesta:
��� = ∑ �S7XS�YZ�S� + [SZ%\�S�8]S^" = ∑ �S_S��S→ =�� = J`�� (2.20)
donde _S son las amplitudes de cada modo, y los coeficientes Aj y Bj se pueden calcular a partir
de las condiciones iniciales =� y =� �.

PFC: Análisis modal de una placa cuadrada.
12
− Caso de vibración forzada sin amortiguamiento
Ahora se considera la respuesta forzada del sistema anterior. Se supone que la excitación es @�� = a����, y que la solución es de la forma =�� = J����, donde a y J son vectores de K�1 amplitudes complejas independientes del tiempo. La ecuación de movimiento quedará en
este caso como:
<=� �� + ?=�� = @�� (2.21)
Introduciendo las expresiones de la respuesta y de la fuerza en la ecuación de movimiento
2.21 se puede calcular la función de respuesta en frecuencia (H(ω)), que es una matriz
simétrica de orden K�K. Esto se debe al hecho de que las matrices de masa, rigidez y
amortiguamiento que describen el sistema también lo son.
−��< + ?�J���� = a���� → ? − ��<�J = a
b�� = Ja = ? − ��<�#" (2.22)
− Caso de vibración libre con amortiguamiento proporcional
Si se considera ahora que hay amortiguamiento proporcional, esta matriz puede expresarse de
la siguiente forma:
> = c< + d? (2.23)
La ecuación de movimiento de los sistemas libres (F=0) y con amortiguamiento (C≠0) es:
<=� �� + >=� �� + ?=�� = L (2.24)
Si la respuesta del sistema es de la forma = = J����, y se sustituye tanto esta expresión como
la ecuación 2.23 en la ecuación 2.24, se llega a una ecuación similar a la del caso de vibración
libre sin amortiguamiento, por lo que se resuelven de la misma manera.
��< − %�c< + d?� − ?�J = 0 → e− �� − %�c%�d + 1 < + ?f J = 0 → ? − 4�<�J = 0 (2.25)
donde:
4� = �$#��g��h3" (2.26)

PFC: Análisis modal de una placa cuadrada.
13
Se observa que, tal como se predijo, la ecuación 2.25 representa el mismo problema de
autovalores que se presenta en los sistemas sin amortiguamiento. Las soluciones λj y Xj
coinciden con las frecuencias naturales, ω0j, y con los modos de vibración, ϕj, del sistema sin
amortiguar.
4S = ��S (2.27)
Los valores de las frecuencias naturales de este sistema, ωj, se calculan sustituyendo la
ecuación 2.27 en 2.26 y particularizando para la frecuencia j:
�S� − 7c + d��S� 8%�S − ��S� = 0 (2.28)
cuya solución es:
�S = 0g3h�.U$ 1�� ± i��S� − jg3h�.U$� k� (2.29)
La frecuencia natural no amortiguada se definió en la ecuación 2.19.
De esta forma, la ecuación 2.29 puede escribirse:
�S = jc + d TUVUk %2 ± lmSnS − oc + d TUVU2 p� = qS%2nS ± imSnS − e qS2nSf�
= ��SrS% ± ��S�1 − rS� (2.30)
La solución del problema de vibración libre con amortiguamiento proporcional será, por tanto:
= = ∑ JS stS�j#�.UuU3��.U�"#uU$k� + tS′�j#�.UuU#��.U�"#uU$k�w]S^" =∑ xSJS�#�.UuU�cos ��S�1 − rS�� + cS�]S^" (2.31)
donde los valores de bj y aj se pueden obtener a partir de las condiciones iniciales.
− Caso de vibración libre con amortiguamiento
Se considera ahora un caso más general de amortiguamiento, el caso de amortiguamiento
viscoso en vibración libre.

PFC: Análisis modal de una placa cuadrada.
14
Si la respuesta se escribe de la forma =�� = J����, la ecuación 2.24 quedará:
−��< + %�> + ?�J��M� = L → −��< + %�> + ?�J = L (2.32)
El problema de autovalores planteado es más complicado de resolver que el visto
anteriormente para los sistemas sin amortiguamiento. Por ello, se recurre a una trasformación
del problema de forma que permita un cálculo más sencillo. La transformación consiste en
convertir el sistema de N ecuaciones diferenciales de segundo orden en otro de 2N ecuaciones
de primer orden. Para ello, a la ecuación de movimiento 2.24 se le añade la identidad <=� �� − <=� �� = L, quedando el siguiente sistema de ecuaciones:
|<=� �� + >=� �� + ?=�� = L<=� �� − <=� �� = L D (2.33)
El siguiente paso sería realizar un cambio de coordenadas con la siguiente variable,
`�� = C=��=� ��D , �̀ �� = C����=� ��D (2.34)
Con esta nueva variable el sistema 2.33 quedará,
E > << L G C����=� ��D + E? LL −<G C=��=� ��D = L→ } �̀ �� + ~`�� = L (2.35)
donde las matrices A y B están formada por una serie de submatrices que se corresponden con
las matrices M, C y K del problema original.
Si la solución de este último sistema de ecuaciones es de la forma `�� = ����� y se sustituye
en la ecuación anterior, se obtiene
%�} + ~�� = L (2.36)
que es un problema típico de autovalores.
En el caso de sistemas subamortiguados, como se vio en el caso de un grado de libertad, los
autovalores son complejos, presentándose por pares, ya que para cada uno aparece también
su conjugado complejo. Será, por tanto:
4S = 9S + %�S �t�t : = 1, … , K4S = 9S − %�S �t�t : = K + 1, … ,2K (2.37)

PFC: Análisis modal de una placa cuadrada.
15
Sustituyendo los autovalores λj en la ecuación 4} + ~�� = L se obtienen los autovectores
asociados Yj, que son los modos de vibración.
Para el cálculo de la respuesta de este tipo de sistemas hay que recurrir a la superposición
modal [8]. Este método consiste en desacoplar las ecuaciones de movimiento definiendo el
vector desplazamiento como x=Φy, donde y es un vector de coordenadas denominadas
coordenadas normales, y Φ es la matriz modal [3].
Se parte de la ecuación diferencial de primer orden 2.35 y se realiza el cambio:
`�� = �� (2.38)
En la ecuación 2.35 se realiza este cambio y se premultiplica cada término por ΨT,
obteniéndose:
��}��� �� + ��~���� = L (2.39)
Debido a que los modos son ortogonales respecto a la matrices de masa y de rigidez [3] y, por
tanto, respecto a la matrices A y B, se comprueba que:
��}� = �⋱ ⋯ 0⋮ a� ⋮0 ⋯ ⋱� = � ��~� = �⋱ ⋯ 0⋮ b� ⋮0 ⋯ ⋱� = � (2.40)
donde a y b son matrices diagonales. Como ψj+N=ψj*, es fácil comprobar que aj+N=aj* y bj+N=bj*.
Con todo esto, la ecuación de movimiento puede escribirse como:
��� �� + ���� = L (2.41)
que está formada por 2N ecuaciones de la forma tS��S + xS�S = 0.
Si se realiza la normalización de los modos de vibración de acuerdo con ψrTAψr=1 y teniendo
en cuenta que λrψrTAψr+ ψr
TAψr=0, las matrices a y b se convierten en:
� = N� = −� = −
������4" 00 ⋱ 0 00 0 0 00 00 00 0 4] 00 4"∗ 0 00 00 00 0 0 00 0 ⋱ 00 4]∗ ���
��� (2.42)
donde �es una matriz diagonal formada por los autovalores del sistema.

PFC: Análisis modal de una placa cuadrada.
16
En ese caso, la ecuación de movimiento queda de la forma:
�� �� − ��t� = L (2.43)
que, al igual que la ecuación 2.41, está formada por 2N ecuaciones independientes del tipo ��S − 4S�S = 0. Cada una de las ecuaciones independientes puede escribirse como:
��S = − �U�U �S = 4S�S �t�t : = 1, … ,2K (2.44)
cuya solución es de la forma:
�S = ����U� �t�t : = 1, … ,2K (2.45)
El vector de condiciones iniciales z0 se obtiene mediante la expresión:
�#"��}`� = �#"��}��� = �� (2.46)
Una vez calculadas las respuestas de los diferentes modos, zj, solo hay que aplicar
superposición modal deshaciendo el cambio de coordenadas:
= = ∑ �S�S�]S^" = �� (2.47)
con �S = �S.
− Caso de vibración forzada con amortiguamiento
En el caso de respuesta forzada, el procedimiento a seguir para obtener la solución es el
mismo que en los casos anteriores, definir un vector `�� que contengan los desplazamientos =�� y las velocidades =� ��. Este procedimiento se explicó en el apartado de vibración libre con
amortiguamiento.
El sistema general de ecuaciones resultante en forma matricial es:
E > << L G �̀ �� + E? LL −<G `�� = H@��L I → → } �̀ �� + ~`�� = ¡�� (2.48)
Calculados previamente los autovalores, λj, y los autovectores, Ψj, puede hacerse el cambio de
variables:
` = ¢� (2.49)

PFC: Análisis modal de una placa cuadrada.
17
Sustituyendo la ecuación 2.49 en 2.48 y premultiplicando por ΨT se obtiene:
��}��� �� + ��~���� = ��� �� + ���� = ¢�¡�� (2.50)
Particularizando para el modo j y dividiendo por aj la ecuación anterior puede escribirse como:
��S + �U�U �S = ��S − 4S�S = "�U S�£ = ¤S (2.51)
Premultiplicando por �#�U�, la ecuación anterior se transforma en:
−4S�#�U��S + �#�U���S = �#�U�¤S (2.52)
O lo que es lo mismo:
22� 7�#�U��S8 = �#�U�¤S (2.53)
Para obtener la solución hay que integrar la ecuación anterior:
�#�U��S − ��S = ¥ �#�U�¤S¦�§¦�� (2.54)
Con lo que zj puede expresarse como:
�S = ��U���S + ��U� ¥ �#�U�¤S¦�§¦�� (2.55)
Si la excitación es armónica del tipo @�� = a����, que produce un vector ¡�� = ¨���� y otro ©�� = ª����, la respuesta en régimen permanente de cualquier modo de vibración, zj, puede
escribirse:
�S = ��U� ¥ ���#�U�«¬S§¦�� = U®¯°±��#�U = ²U³�U "��#�U ¨���� (2.56)
Con lo que la respuesta general será:
` = ¢� = ∑ S�S�]S^" = ∑ ²U²U³�U "��#�U ¨�����]S^" = ∑ j²U²U³�U "��#�U + ²́U²́U³�µU "��#�́Uk]S^" ¨����
(2.57)
Teniendo en cuenta las características de los modos, S, estos pueden expresarse:
S = A4S �S �S B = A4S�S�S B (2.58)

PFC: Análisis modal de una placa cuadrada.
18
y como ¨ = ¶0 �·�, la respuesta x del sistema puede expresarse como:
= = �� = ¸ �S�S�]
S^" = ¸ �S�S�tS1%� − 4S ¨�����]
S^" =
∑ j¹U¹U³�U "��#�U + ¹́U¹́U³�µU "��#�́Uk]S^" a���� (2.59)
Las ecuaciones anteriores pueden expresarse matricialmente de la forma:
� = b���#"��¡= = �b���#"��@ (2.60)
donde � es una matriz modal de dimensión Nx2N formada por la segunda parte de los 2N
modos, es decir, la parte de los modos asociada a los movimientos x. Las matrices a y H(ω) son
matrices diagonales cuyos términos son aj y:
�S = "��#�U (2.61)
2.1.3. Análisis modal experimental
El análisis modal experimental es una técnica mediante la cual se caracteriza el
comportamiento dinámico de un objeto o estructura, obteniendo un modelo dinámico
experimental [9].
Este tipo de análisis modal se compone de cinco fases [3]. La primera de ellas es montar el
equipo y preparar el ensayo: colocación del objeto de ensayo, sujeción de los acelerómetros,
conexión del sistema de adquisición de datos, calibración, etc. La segunda fase es la
adquisición de datos y la estimación de las funciones de respuesta en frecuencia (H(ω)). La
tercera consiste en la identificación del sistema: la determinación de las características del
sistema a partir de las señales de entrada (excitación, F(t)) y salida (respuesta, X(t)). La cuarta
fase es la validación de los resultados obtenidos. Estas cuatro fases son necesarias para
alcanzar la quinta: uso de la información obtenida para mejorar el modelo teórico.
Para la adquisición de datos es necesario transmitir una excitación al sistema. Esta puede ser
mediante impactos o mediante una excitación continua, aleatoria o sinusoidal.
Las principales características de los análisis experimentales son [8]:

PFC: Análisis modal de una placa cuadrada.
19
− El número de modos será menor que el máximo entre el número de puntos donde se
aplica la excitación y el número de puntos en los que se va a medir.
− No incluye grados de libertad de giro.
− El número de modos a determinar queda limitado por la máxima frecuencia que pueda
alcanzar los equipos de medida.
Durante los ensayos realizados se extraen datos temporales mediante acelerómetros u otros
sensores de medida. Para poder calcular la función de respuesta en frecuencia (a partir de
ahora FRF) se transforman los datos al dominio de la frecuencia usando la Transformada de
Fourier [10]. La FRF se define, tal y como se explicó en el apartado de análisis modal teórico,
como el cociente entre la respuesta del sistema y la fuerza aplicada al mismo. La respuesta del
sistema puede ser medida como desplazamientos, velocidades o aceleraciones.
������ → ������ → ��� = ��!�� (2.62)
Debido a la trasformación que sufren los datos, la FRF estará formada de valores complejos.
Esto significa que esta función contendrá una parte real y otra imaginaria, o, lo que es lo
mismo, una componente en fase y otra en magnitud.
En la FRF aparecen picos pronunciados en torno a las frecuencias naturales del sistema [11].
Además, se observa que estos picos coinciden con zonas donde la respuesta temporal tiene
amplitudes máximas. Por tanto, se puede usar tanto la respuesta temporal como la FRF para
determinar estas frecuencias.
Figura 2.5 FRF y señal temporal de un sistema cualquiera [11]

PFC: Análisis modal de una placa cuadrada.
20
Al observar el modo en que se deforma el objeto de estudio en torno a las frecuencias
naturales, se confirma que en cada una de ellas hay una deformada diferente. Estas
deformadas se conocen como modos de vibración. En la figura 2.6 se observan la respuesta
temporal, la FRF y los modos de vibración para las primeras cuatro frecuencias de una placa
libre. Aparecen dos modos de vibración de flexión pura (el primero y el tercero) y otros dos de
torsión pura (el segundo y el cuarto).
Figura 2.6 Diferentes modos de vibración para distintas frecuencias [11]
Las frecuencias naturales y modos de vibración aparecen en todas las estructuras y objetos
que se diseñan en ingeniería. Ciertas características, como la masa y la rigidez, determinan
estas frecuencias y modos, como se vio en el apartado 2.1.
Para mostrar el proceso se estudia una barra empotrada en uno de sus extremos con tres
puntos de medida. Hay tres posibles puntos donde la fuerza puede ser aplicada y los mismos
tres puntos donde la respuesta puede ser medida. Esto significa que hay un total de 9 posibles
valores complejos de la FRF que pueden ser adquiridos (9 valores de fase y otros 9 de
magnitud). La FRF suele ser descrita con dos subíndices que denotan los puntos donde se
aplican la fuerza y donde se mide la excitación, Hout,in (con respecto a la notación matricial,
sería Hfila, columna).

PFC: Análisis modal de una placa cuadrada.
21
Figura 2.7 Modos de vibración de una barra empotrada en uno de sus extremos [11]
Si en la barra de la figura 2.7 se mide la excitación en el mismo punto donde se excita, por
ejemplo, el punto j, se obtendrá la componente Hjj de la FRF. Esta es una medida especial,
cuyas características son:
− Todos los picos de resonancia están separados por anti-resonancias. Las anti-
resonancias no son más que frecuencias en las que la amplitud es nula. (Ver Figura 2.8)
− La fase pierde 180 grados al pasar por un pico de resonancia, y pierde 180 grados
cuando se pasa por un pico de anti-resonancia. (Ver Figura 2.8)
− Los picos en la parte imaginaria de la FRF tienen todos los puntos en la misma
dirección. (Ver Figura 2.8)
Figura 2.8 Componente Hjj de la FRF
Por otro lado, la función de respuesta en frecuencia es simétrica. Esto es debido al hecho de
que las matrices de masa, amortiguamiento y rigidez que describen el sistema también lo son.
Por tanto, Hij=Hji, propiedad que es llamada reciprocidad. De este modo, no es necesario medir
todos los términos de la matriz FRF, solo es necesario conocer una fila o una columna de la
misma para obtener todo los modos de vibración y frecuencias naturales.

PFC: Análisis modal de una placa cuadrada.
22
Para explicar esto último, se van a comparar distintas componentes de la FRF de la barra del
ejemplo. Primero se verá la tercera fila de la FRF, centrándose en el primer modo. En la gráfica
de la parte imaginaria de la FRF se observa perfectamente este primer modo (figura 2.9, a). Por
lo que es fácil extraer la forma del modo de los datos medidos. Si se observa el mismo modo
en la segunda fila (figura 2.9, b), también se puede ver la misma forma del primer modo. Esto
significa que se puede usar cualquier fila para describir la forma de un modo del sistema.
Figura 2.9 Primer modo obtenido dos filas distintas de una barra empotrada en un extremo
Al centrarse en la tercera fila de nuevo, pero en el segundo modo, se observa perfectamente,
igual que ocurrió en la figura 2.9, a. Sin embargo, al centrarse en la segunda fila, el modo
segundo no se puede ver (figura 2.10, b). Esto ocurre porque el punto de referencia coincide
con un nodo para este modo.
Figura 2.10 Modo segundo para la tercera y segunda columna de la FRF de una barra
empotrada en un extremo

PFC: Análisis modal de una placa cuadrada.
23
Esto último es muy importante en análisis modal experimental: el punto de referencia nunca
puede coincidir con un nodo ya que este modo no se observará en las medidas de la FRF y, por
tanto, el modo no podrá ser obtenido.
Si se aplicara la fuerza en el punto i y se midiera la respuesta en el punto j, se obtendría la
componente ij de la función de respuesta en frecuencia, Hij. Existen dos métodos posibles:
− Excitar en todos los puntos y solo medir en uno de ellos (con un martillo, por ejemplo),
lo que daría como resultado una fila de la FRF.
− Excitar en un solo punto y medir en todos (con un excitador, por ejemplo), lo que daría
como resultado una columna de la FRF.
Teóricamente, no hay diferencia entre estos dos métodos, puesto que la FRF se calcula a partir
de las matrices de masa, amortiguamiento y rigidez, que son simétricas [11]. Por el contrario,
esto podría no ocurrir en la práctica. En un ensayo en el que se excita en solo un punto, el peso
de los acelerómetros relativo al peso de las diferentes partes de la estructura puede ser
importante. Esto se acentúa en sistemas con muchos canales donde los acelerómetros se
mueven por todo el sistema para poder adquirir los puntos. Esto puede resultar un problema
especialmente en estructuras ligeras. Una posible solución es montar todos los acelerómetros
en la estructura, aunque solo se mida en alguno de ellos. Otra diferencia puede resultar de los
efectos del excitador, ya que los modos de la estructura pueden verse afectados [12]. Por
tanto, es más recomendable obtener filas de la FRF y no columnas.
La medida más importante que se necesita para el análisis modal experimental es la FRF. Suele
ser adquirida usando un sistema de adquisición con un software que desarrolle la
transformada rápida de Fourier [11].
En el proceso de la adquisición de datos, primero hay una señal analógica que se obtiene
directamente del aparato de medida. Esta señal analógica debe ser filtrada para eliminar el
aliasing en altas frecuencias. En procesamiento de señales, el aliasing es el efecto que causa
que señales continuas distintas se tornen indistinguibles cuando se muestrean digitalmente.
Cuando esto sucede, la señal original no puede ser reconstruida de forma unívoca a partir de la
señal digital. A los filtros usados para evitar este fenómeno se les denomina filtros anti-
aliasing. El siguiente paso es digitalizar la señal analógica. Esto se realiza con convertidor
digital-analógico. Este proceso usa convertidores de 10, 12 o 16 bits; cuantos más bits, mejor
resolución tendrá la señal digitalizada.

PFC: Análisis modal de una placa cuadrada.
24
Algunas de las grandes preocupaciones radican en el muestreo y en los errores de
cuantización, que pueden introducirse en la digitalización sin que puedan ser detectados. El
índice de muestreo controla la resolución en la representación de la señales, tanto en el
dominio del tiempo como en el de la frecuencia. Por otra parte, los errores de cuantización
están asociados con la precisión de la magnitud de la señal. Estos dos parámetros pueden
causar algunos errores en los datos medidos. No obstante, el peor error que puede ocurrir en
el procesamiento de la señal es el leakage. El leakage ocurre si, cuando se calcula
la transformada rápida de Fourier, alguna de las componentes frecuenciales cae entre
frecuencias de referencia. La transformada rápida de Fourier necesita que los datos de
muestreo sean una completa representación de los datos temporales o una repetición
periódica de los datos medidos. Si esto no ocurriese, el leakage causa una distorsión o
difuminación de las frecuencias. Para minimizar esta distorsión, funciones de ponderación
llamadas ventanas se usan para que los datos de muestreo aparezcan con la periodicidad que
necesita la FFT (transformada rápida de Fourier). Aunque estas ventanas reducen el efecto de
este fenómeno, no lo eliminan por completo.
Una vez que los datos están muestreados, se computa la FFT para formar un espectro lineal de
la excitación (entrada) y de la respuesta (salida). Los principales espectros computados son los
de salida, los de entrada y el espectro cruzado entre la salida y la entrada. Estas funciones se
usan para construir dos funciones importantes que se usan la adquisición modal: la FRF y la
función de coherencia. Esta última se usa como una herramienta para el cálculo de la calidad
de los datos que identifica cuanto de relacionada está la salida con la entrada.
En párrafos anteriores se mencionó que la excitación se puede llevar a cabo en un punto
midiendo en todos o excitar en todos los puntos y medir solo en uno. El primero de los casos
se realiza mediante impactos mientras que el segundo, con una vibración continua [11].
Con respecto a los ensayos por impactos, hay dos consideraciones muy importantes a tener en
cuenta. Uno de ellos es la selección de la punta del martillo, ya que el rango de frecuencias de
la excitación es controlada principalmente por la dureza de la punta seleccionada. Cuanto más
dura sea, más ancho será el rango de frecuencia que se excite. El segundo aspecto está
relacionado con el uso de una ventana exponencial para la respuesta del acelerómetro.
Generalmente para estructuras con poco amortiguamiento, la respuesta debida a un impacto
no llegará a cero al final del intervalo muestreado. En estos casos, los datos transformados
sufrirán algunos de los fenómenos explicados anteriormente, tales como el leakage. Para

PFC: Análisis modal de una placa cuadrada.
25
excitaciones mediante impactos, la ventana más usada para disminuir el leakage es la
exponencial.
El segundo tipo de excitación que puede darse es una vibración continua. La consideración más
importante a tener en cuenta se centra en los efectos de las señales de excitación que
minimiza o incluso elimina la necesidad de usar ventanas. Una de las excitaciones más usadas
es la excitación aleatoria (random) por su fácil implementación. No obstante, debido a su
naturaleza, el fenómeno del leakage se acentúa, y se vuelve un problema serio aunque se usen
ventanas. Por ello, el tipo de excitación más común es una sinusoidal, ya que no necesita el uso
de ventanas por ser una función periódica.
2.2. Teoría de placas
2.2.1. Introducción
A través de la teoría de placas se pueden calcular las frecuencias naturales y los modos de
vibración de diversos elementos, al igual que con el análisis modal.
En este proyecto se va a estudiar el comportamiento de una placa delgada. Se considera que
las flechas º de la placa son pequeñas comparadas con el espesor de la misma. Ante esta
situación se pueden realizar una serie de hipótesis, que son [13]:
− No hay deformación en el plano medio de la placa. Este plano permanece neutro
durante la flexión.
− Los puntos situados en la situación indeformada en una normal al plano medio de la
placa permanecen en la situación deformada en una normal a la superficie media de la
placa. Por tanto, se pueden despreciar los esfuerzos cortantes en la deformación de la
placa.
− Las tensiones normales en la dirección transversal de la placa son despreciables.
Consecuentemente con estas hipótesis, todas las tensiones pueden expresarse en función de
la flecha º de la placa, que a su vez es función de las coordenadas en el plano medio de la
placa.
Para poder calcular las frecuencias naturales y los modos de vibración de una placa se debe
obtener primero la ecuación de la misma en función de la frecuencia. Una vez calculada, se
aplicará las condiciones de contorno correspondientes y, entonces, se podrá resolver. Aunque
PFC: Análisis modal de una placa cuadrada.
26
este es el procedimiento general, la obtención de las frecuencias y los modos se realizará de
diferente manera según el método aplicado. Por ello, este procedimiento se detallará cuando
se expliquen los distintos métodos.
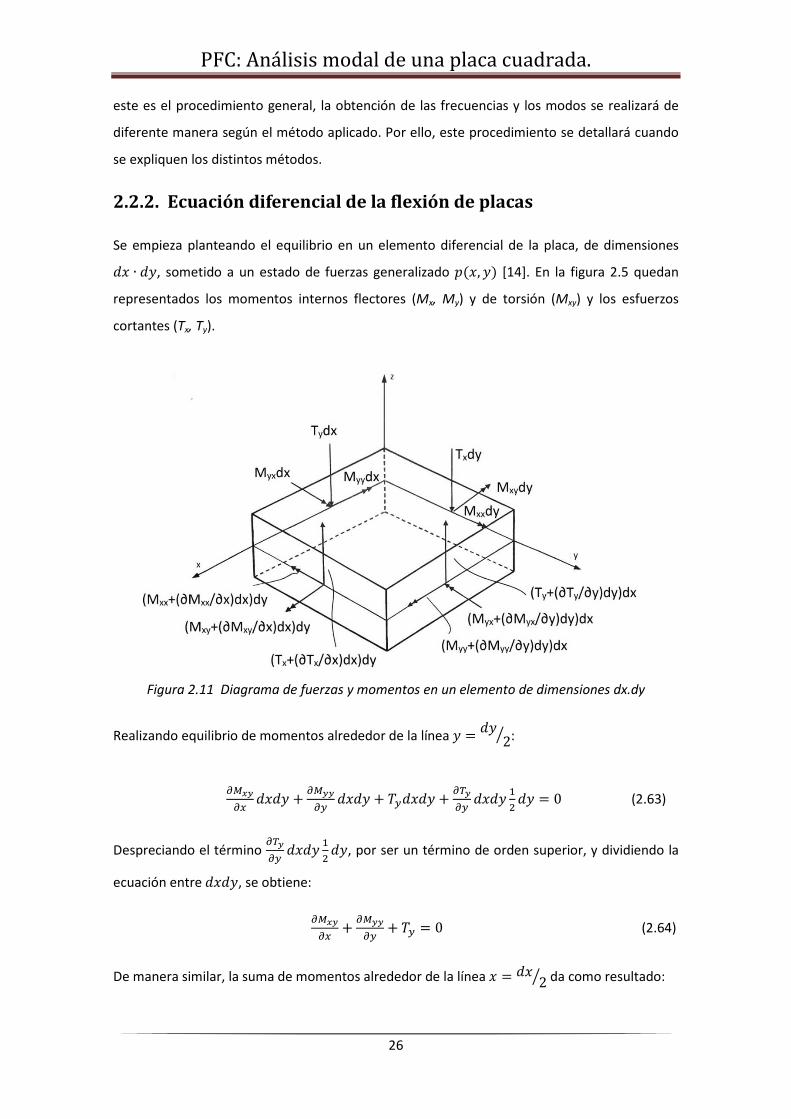
2.2.2. Ecuación diferencial de la flexión de placas
Se empieza planteando el equilibrio en un elemento diferencial de la placa, de dimensiones §� ∙ §_, sometido a un estado de fuerzas generalizado ��, _� [14]. En la figura 2.5 quedan
representados los momentos internos flectores (Mx, My) y de torsión (Mxy) y los esfuerzos
cortantes (Tx, Ty).
Figura 2.11 Diagrama de fuerzas y momentos en un elemento de dimensiones dx.dy
Realizando equilibrio de momentos alrededor de la línea _ = §_ 26 :
¼V½¾¼¿ §�§_ + ¼V¾¾¼À §�§_ + ÁÀ§�§_ + ¼�¾¼À §�§_ "� §_ = 0 (2.63)
Despreciando el término ¼�¾¼À §�§_ "� §_, por ser un término de orden superior, y dividiendo la
ecuación entre §�§_, se obtiene:
¼V½¾¼¿ + ¼V¾¾¼À + ÁÀ = 0 (2.64)
De manera similar, la suma de momentos alrededor de la línea � = §� 26 da como resultado:

PFC: Análisis modal de una placa cuadrada.
27
ÂnÀ¿Â_ §�§_ + Ân¿¿Â� §�§_ + Á¿§�§_ + ÂÁ¿Â� §�§_ 12 §� = 0
¼V½½¼¿ + ¼V¾½¼À + Á¿ = 0 (2.65)
Otra ecuación se puede obtener sumando todas las fuerzas en la dirección �. Además de los
momentos y las fuerzas que aparecen en el diagrama de la figura 2.11, se asume que también
hay aplicada una fuerza externa p(x,y) en dirección z, que se añade a la ecuación de equilibro
siguiente.
�§�§_ − Á¿§_ + 0Á¿ + ¼�½¼¿ §�1 §_ − ÁÀ§� + 0ÁÀ + ¼�¾¼À §_1 §� = 0 (2.66)
Dividiendo entre §�§_ resulta: � + ¼�½¼¿ + ¼�¾¼À = 0 (2.67)
Sustituyendo las ecuaciones 2.64 y 2.65 en la ecuación 2.67 se obtiene la relación existente
entre las fuerzas externas y los momentos internos,
� = ¼$V½½¼¿$ + 2 ¼$V½¾¼¿¼À + ¼$V¾¾¼À$ (2.68)
Los momentos internos de flexión y de torsión que aparecen en la ecuación anterior se
relacionan con las tensiones a las que está sometida la placa de la siguiente forma [14]:
n¿¿ = − à 9¿�§�Ä �6#Ä �6
nÀÀ = − ¥ 9À�§�Ä �6#Ä �6 (2.69)
n¿À = − à ¦¿À�§�Ä �6#Ä �6
siendo σx y σy las tensiones en dirección x e y respectivamente y τxy la tensión tangencial.
La tensión en una dirección puede relacionarse con la deformación provocada en la misma
dirección mediante la Ley de Hooke, suponiendo materiales elásticos y lineales [15],
� = Ưǯ (2.70)
con εi la deformación en la dirección i y Ei el módulo de Young en la dirección i.

PFC: Análisis modal de una placa cuadrada.
28
Esta ley está asociada a estados uniaxiales de tensión, por lo que es precisa su generalización
a estados bidimensionales. La tensión 9� provoca un alargamiento en la dirección i, pero
también un acortamiento en la dirección perpendicular. Por lo tanto, el valor total de la
deformación en la dirección x vendrá expresado por:
Å¿ = ƽǽ − ÈÀ ƾǾ (2.71)
siendo νy el coeficiente de Poisson en la dirección y.
Esto puede extenderse de forma inmediata a la dirección y:
ÅÀ = ƾǾ − È¿ ƽǽ (2.72)
Despejando de las dos ecuaciones anteriores (2.71, 2.72) los valores de las tensiones 9¿ y 9À,
se obtiene: 9¿ = ǽ"#ɽɾ 7Å¿ + ÈÀÅÀ89À = Ǿ"#ɽɾ 7ÅÀ + È¿Å¿8 (2.73)
De una forma similar se va a relacionar la tensión tangencial ¦¿À con la deformación tangencial Ê¿À: ¦¿À = Ë¿À ∙ Ê¿À (2.74)
siendo Ë¿À el módulo de elasticidad tangencial o módulo de cizalladura, y definiéndose como
sigue: Ë¿À = ǽǾǽ37"3�ɽ¾8Ǿ (2.75)
Por último, se va a relacionar las deformaciones normales y tangenciales con los
desplazamientos del plano medio de la placa. Dicha relación se puede expresar según la teoría
de la elasticidad plana como [15]:
Å¿ = ¼Ì¼¿ ÅÀ = ¼Í¼À Ê¿À = ¼Ì¼¿ + ¼Í¼À (2.76)
Si se considera ahora un elemento de la placa sometida a una carga vertical externa, los
ángulos de rotación de este son: ¿ = ¼M¼¿ À = ¼M¼À (2.77)

PFC: Análisis modal de una placa cuadrada.
29
Los desplazamientos horizontales a una distancia � del medio de la placa se expresan:
Î = −� ¿ = −� ¼M¼¿ Ï = −� À = −� ¼M¼À (2.78)
Por lo que las deformaciones finalmente quedan:
Å¿ = −� ¼$M¼¿$ ÅÀ = −� ¼$M¼À$ Ê¿À = −2� ¼$M¼¿¼À (2.79)
Sustituyendo la ecuación 2.79 en 2.73 y 2.74, y posteriormente, en 2.69, se obtiene la
expresión de los momentos internos de flexión y de torsión en función de la deflexión de la
placa.
|9¿ = − п�1 − È¿ÈÀ eÂ�ºÂ�� + ÈÀ Â�ºÂ_� f9À = − ÐÀ�1 − È¿ÈÀ eÂ�ºÂ_� + È¿ Â�ºÂ�� f
¦¿À = −2Ë¿À� Â�ºÂ�Â_ ÑÒÒÓÒÒÔ →
→ÕÒÖÒ×n¿¿ = ǽÄØ"�7"#ɽɾ8 0¼$M¼¿$ + ÈÀ ¼$M¼À$ 1
nÀÀ = ǾÄØ"�7"#ɽɾ8 0¼$M¼À$ + È¿ ¼$M¼¿$ 1n¿À = Ù½¾ÄØÚ ¼$M¼¿¼À
| (2.80)
siendo h el espesor de la placa.
Se define ahora las rigideces a flexión Û¿ y ÛÀ y a torsión Û� como:
Û¿ = ǽÄØ"�7"#ɽɾ8 ÛÀ = ǾÄØ"�7"#ɽɾ8 Û� = Ù½¾ÄØ"� (2.81)
Por tanto, los momentos internos a flexión y a torsión de la ecuación 2.80 se pueden reescribir
como:
n¿¿ = Û¿ eÂ�ºÂ�� + ÈÀ Â�ºÂ_� f
nÀÀ = ÛÀ 0¼$M¼À$ + È¿ ¼$M¼¿$ 1 (2.82)
n¿À = 2Û� Â�ºÂ�Â_

PFC: Análisis modal de una placa cuadrada.
30
Sustituyendo estas expresiones en la ecuación 2.68,
Û¿ 0¼ÜM¼¿Ü + ÈÀ ¼ÜM¼¿$¼À$1 + 2 02Û� ¼ÜM¼¿$¼À$1 + _ 0¼ÜM¼ÀÜ + È¿ ¼ÜM¼¿$¼À$1 = ��, _� (2.83)
agrupando términos,
Û¿ ¼ÜM¼¿Ü + 7Û¿ÈÀ + 4Û� + ÛÀÈ¿8 ¼ÜM¼¿$¼À$ + ÛÀ ¼ÜM¼ÀÜ = ��, _� (2.84)
e introduciendo la notación,
2Û¿À = Û¿ÈÀ + 4Û� + ÛÀÈ¿ (2.85)
La ecuación 2.84 queda finalmente:
Û¿ ¼ÜM¼¿Ü + 2Û¿À ¼ÜM¼¿$¼À$ + ÛÀ ¼ÜM¼ÀÜ = ��, _� (2.86)
La ecuación 2.86 es la ecuación diferencial general de una placa ortótropa. Esta expresión se
puede particularizar para una placa isótropa. Las características de este tipo de placa son:
− Las rigideces a flexión y a torsión son iguales en ambas direcciones:Û = Û¿ = ÛÀ =Û¿À.
− Los módulos de Poisson son iguales en ambas direcciones: È = È¿ = ÈÀ.
− El módulo de cizalladura queda entonces: Ë = Ç�"3É�. Con todo esto, la ecuación quedará para una placa isótropa:
Û 0¼ÜM¼¿Ü + 2 ¼ÜM¼¿$¼À$ + ¼ÜM¼ÀÜ 1 = ��, _� (2.87)
En este proyecto se estudian placas isótropas, por lo que la expresión que se usará de aquí en
adelante será la ecuación 2.87.
2.2.3. Solución de la ecuación diferencial
En general hay tres métodos analíticos para resolver la ecuación diferencial de la placa [13].
Estos son:
− Método de Navier
− Método de Levy
− Método de Ritz

PFC: Análisis modal de una placa cuadrada.
31
Para resolver la ecuación es necesario especificar a priori las condiciones de contorno a las que
estará sometida la placa. El método de Levy utiliza series simples y expresa la solución de la
ecuación de la placa como una suma de una solución particular más una homogénea. Otro
método clásico, el de Navier, consiste en usar series trigonométricas dobles. El método de
Ritz, o de la energía, también usa este tipo de series para la resolución de la ecuación
diferencial. La diferencia con el de Navier es que este método se basa en la ley de conservación
de la energía de sistemas conservativos que se encuentran en una configuración de equilibrio,
por lo que se exige que la suma total de los trabajaos internos sea igual y de signo contrario a
la suma de los trabajos externos.
2.2.3.1. Método de Navier
El método de Navier consiste en expresar la deflexión y la carga lateral como series
trigonométricas dobles. La única condición de contorno para la que este método es aplicable
es simplemente apoyada en todo el perímetro.
El método se basa en desarrollar una función dada �, _�, que será la deflexión, en series de
dos variables, usando la expresión:
�, _� = ∑ ∑ ��Þ sin �á¿� cos ÞáÀ�âÞ^"â�^" (2.88) donde a y b son las dimensiones de la placa y Fmn un coeficiente que se determina a
continuación.
Para obtener los coeficientes Fmn, la ecuación 2.88 es multiplicada por Z%\ �á¿� Z%\ SáÀ� y el
resultado es integrado entre los límites de la placa: ¥ ¥ �, _� Z%\ �á¿� Z%\ SáÀ� §�§_���� =
∑ ∑ ��Þ ¥ Z%\ �á¿� Z%\ �á¿� §��� ¥ Z%\ SáÀ� Z%\ ÞáÀ� §_��âÞ^"â�^" (2.89) Dada la ortogonalidad de la función seno, se tiene que:
¥ Z%\ �á¿� Z%\ �á¿�� §_�� = ã0 �t�t \ ≠ :�� �t�t \ = :|¥ Z%\ SáÀ� Z%\ ÞáÀ� §_�� = ã0 �t�t \ ≠ :�� �t�t \ = :| (2.90)

PFC: Análisis modal de una placa cuadrada.
32
Sustituyendo la ecuación 2.90 en 2.89, y despejando de esta última el coeficiente Fmn, queda:
��Þ = *�� ¥ ¥ �, _� Z%\ �á¿� Z%\ ÞáÀ� §�§_���� 2.91) Para el caso que atañe, la resolución de la ecuación diferencial de gobierno de la placa se
realiza en tres pasos:
1. La deflexión es expresada con una serie doble de senos, al igual que se hizo con la
función f(x,y) en la ecuación 2.88: º�, _� = ∑ ∑ å�Þ Z%\ �á¿� �YZ ÞáÀ�âÞ^"â�^" (2.92) 2. La carga lateral ��, _�es también representada con una serie doble de senos: ��, _� = ∑ ∑ ç�Þ Z%\ �á¿� �YZ ÞáÀ�âÞ^"â�^" (2.93)
El coeficiente ç�Þes calculado como Fmn (ecuación 2.91): ç�Þ = *�� ¥ ¥ ��, _� Z%\ �á¿� Z%\ ÞáÀ� §�§_���� (2.94) 3. Sustituyendo los valores de la deflexión y de las cargas laterales obtenidas en la
ecuación general diferencial de placas 2.87, se calcula los coeficientes å�Þ: ∑ ∑ å�Þ j0�á� 1* + 2 0�á� 1� 0Þá� 1� + 0Þá� 1*k sin êëìí �YZ ÞáÀ�âÞ^"â�^" =
∑ ∑ îïðñ sin êëìí cos òëóôâÞ^"â�^" (2.95)
Reordenando esta ecuación se tiene: å�Þ = õ�ö÷áÜj0�ø 1$30öù1$k$ (2.96)
Finalmente, la deflexión de la placa queda determinada por: º�, _� = ∑ ∑ õ�ö÷áÜj0�ø 1$30öù1$k$ sin �á¿� cos ÞáÀ�âÞ^"â�^" (2.97)
Para el cálculo de las frecuencias naturales y los modos de vibración se asumen vibración libre.
Esto implica que la única fuerza que actúa en el sistema es el propio peso de la placa, es decir: ��, _� = −úÎ� �, _� (2.98)
con ú la densidad por unidad de área.
Si se asume vibración armónica, el vector u(x,y,t) se puede expresar como: Î�, _, �� = º�, _� cos �� (2.99)
Por lo tanto, la segunda derivada de este vector será: Î� �, _, �� = −��º�, _� cos �� → Î� �, _� = −��º�, _� (2.100)

PFC: Análisis modal de una placa cuadrada.
33
Al sustituir la primera ecuación de 2.100 en 2.98 se obtiene la expresión de la fuerza p en
función de la frecuencia ω. Si, a su vez, se sustituye esta nueva expresión en la ecuación
diferencial de la placa 2.87, se obtiene:
Û 0¼ÜM¼¿Ü + 2 ¼ÜM¼¿$¼À$ + ¼ÜM¼ÀÜ 1 − ú��º = 0 (2.101)
Como el único caso que se puede resolver por este método es que la placa esté simplemente
apoyada en todo el perímetro, las condiciones de contorno quedarán como:
|º0, _� = 0 → 0¼M¼À1�,À = 0 → 0¼$M¼À$ 1�,À = 0n¿¿ = 0 → 0¼$M¼¿$ + È ¼$M¼À$ 1�,À = 0 û
|ºt, _� = 0 → 0¼M¼À1�,À = 0 → 0¼$M¼À$ 1�,À = 0n¿¿ = 0 → 0¼$M¼¿$ + È ¼$M¼À$ 1�,À = 0 û
|º�, 0� = 0 → 0¼M¼¿ 1¿,� = 0 → 0¼$M¼¿$ 1¿,� = 0nÀÀ = 0 → 0¼$M¼À$ + È ¼$M¼¿$ 1¿,� = 0 û
|º�, x� = 0 → 0¼M¼¿ 1¿,� = 0 → 0¼$M¼¿$ 1¿,� = 0nÀÀ = 0 → 0¼$M¼À$ + È ¼$M¼¿$ 1¿,� = 0 û
(2.102)
Se asume la siguiente expresión de la deflexión, que cumple las condiciones de contorno
anteriormente escritas [13]: º�Þ = å�Þ sin �á¿� sin Þá¿� (2.103)
Sustituyendo la expresión anterior en la ecuación 2.101 se pueden obtener las frecuencias
naturales:
Û j0�á� 1* + 2 0�á� 1� 0Þá� 1� + 0Þá� 1*k = ú�� →→ ��Þ = �÷ü ý� j0�� 1� + 0Þ�1�k (2.104)
Y los modos de vibración, basándose en la ecuación, tendrán la forma: þ�Þ = ��Þ sin �á¿� sin Þá¿� (2.105)
2.2.3.2. Método de Levy
El método de Levy está basado en series simples. La solución para la deflexión es separada en
dos partes, una solución particular (ºõ) y una solución de la ecuación homogénea (º�),
º�, _� = ºõ + º� (2.106)

PFC: Análisis modal de una placa cuadrada.
34
Para obtener la solución particular por este método es necesario que dos lados opuestos de la
placa estén simplemente apoyados. Los otros dos pueden tener cualquier condición de
contorno.
En lo que sigue se supone que los ejes � = 0 y � = t están simplemente apoyados, y que el
origen del sistema de coordenadas se traslada al punto � = 0, _ = x 26 . También se asume que
las cargas laterales tienen la misma distribución en todas las secciones paralelas al eje x.
La solución particular es obtenida asumiendo que la placa tiene longitud infinita en la dirección
y, es decir, x → ∞. La ecuación de la placa 2.87 se simplifica:
2ÜM�(¿)2¿Ü = �(¿)
÷ (2.107)
Esta ecuación se puede resolver usando el método de Navier. Para ello se define la deflexión
de manera homóloga a como se hizo en la ecuación 2.92 y la carga externa como la ecuación
2.93:
º�(�) = ∑ å� Z%\ �á¿�
â�^" (2.108)
�(�) = ∑ ç� sin �á¿�
â�^" (2.109)
Para calcular el coeficiente Pm se multiplica la ecuación 2.101 por Z%\ �á¿� y se integra el
resultado:
¥ �(�)Z%\ �á¿� §��
� = ∑ ç� ¥ sin �á¿� Z%\ �á¿
� §���
â�^" (2.110)
Teniendo en cuenta la ortogonalidad de la función seno (primera ecuación de 2.90) y
despejando el valor de Pm de la ecuación 2.103 se obtiene:
ç� = �� ¥ �(�)Z%\ �á¿
� §��� (2.111)
Para el cálculo del coeficiente Wm, se sustituyen las ecuaciones 2.101 y 2.102 en la ecuación
2.99:
∑ å� 0�á� 1* sin �á¿
�â�^" = ∑ õ�
÷ sin �á¿�
â�^" (2.112)

PFC: Análisis modal de una placa cuadrada.
35
Reordenando esta ecuación se tiene:
å� = õ�÷0��
ø 1Ü (2.113)
Una vez definida la solución particular, el siguiente paso es calcular la solución de la ecuación
homogénea. Se asume que º� puede ser escrita como el producto de dos funciones
individuales �(�) e �(_),
º� = �(�)�(_) (2.114)
Sustituyendo esta expresión en la ecuación diferencial de placa homogénea se obtiene:
¼ÜM¼¿Ü + 2 ¼ÜM
¼¿$¼À$ + ¼ÜM¼ÀÜ = 0 → ���� + 2�� + ���� = 0 (2.115)
La parte homogénea de la deflexión se puede expresar con una serie simple trigonométrica:
º�(�) = ∑ �(_) sin �á¿�
â�^" (2.116)
Esta expresión satisface las condiciones de contorno de simplemente apoyado en � = 0 y
� = t, como º� = 0 y ¼$M¼¿$ = 0 respectivamente. Sustituyendo º� (ecuación 2.107) en 2.107,
se tiene:
∑ sin �á¿� j0�á
� 1* �(_) − 2 0�á� 1� �(_) + �(_)kâ�^" = 0 (2.117)
Para un valor específico � esta ecuación se puede escribir como:
0�á� 1* �_� − 2 0�á� 1� �_� + ���_� = 0 (2.118)
la cual es una ecuación lineal homogénea diferencial de cuarto orden con coeficientes
constantes. Una solución de la ecuación 2.110 puede ser dada en forma de funciones
hiperbólicas:
� = X� cosh�áÀ� + [� �áÀ� sinh�áÀ� + q� sinh�áÀ� + Û� �áÀ� sinh�áÀ� (2.119)
Las constantes X�, [�,q� y Û� se determinan con las condiciones de contorno en los cuatro
lados de la placa.
Si las condiciones de contorno son simétricas respecto al eje x, la deflexión es una función par
de y: º+_� = º−_�. Consecuentemente, los coeficientes q� y Û� son ceros, y la función
2.111 se simplifica:

PFC: Análisis modal de una placa cuadrada.
36
� = X� cosh�áÀ� + [�
�áÀ� sinh�áÀ
� (2.120)
Por consiguiente, en el caso de condiciones de contorno idénticas en _ = ± �� la ecuación
diferencial de la placa se puede representar por:
º(�, _) = ºõ + º� =
= ∑ å� sin �á¿�
â�^" + ∑ 0X� cosh�áÀ� + [�
�áÀ� sinh�áÀ
� 1 sin ��
â�^" (2.121)
El cálculo de las frecuencias y los modos de vibración se realiza de forma similar a como se hizo
en el caso de Navier. La función de la deflexión que se elija debe cumplir con las condiciones
de contorno que se tengan en cada caso.
2.2.3.3. Método de la energía o método de Ritz
Los métodos de la energía son los más generales en cuanto a condiciones de contorno se
refieren, pues puede aplicarse a cualquier caso. Están basados en el principio de conservación
de la energía [16], el cual requiere que el trabajo total interno sea igual y opuesto al trabajo
externo, �� + �® = 0 (2.122)
donde �® es el potencial de las fuerzas externas y �� la energía de deformación almacenada en
la placa durante la deformación. El método de Ritz usa este principio de conservación de la
energía.
La energía interna o energía de deformación �� se calcula integrando el trabajo de las fuerzas
internas en el área de la placa. En general, en la energía de deformación de la placa
contribuyen los efectos de membrana y de flexión. Los esfuerzos de membrana son el
promedio de los esfuerzos producidos [17]. La diferencia entre los esfuerzos de membrana y
los de flexión se representan en la siguiente figura:
Figura 2.12 Esfuerzos de membrana y de flexión

PFC: Análisis modal de una placa cuadrada.
37
En la teoría de pequeñas deflexiones, los efectos de membrana y de flexión están
desacoplados, por lo que se pueden tratar por separado. En este caso, aunque los esfuerzos
cortantes produzcan energía de deformación adicional, el orden de magnitud de esta es muy
pequeño en comparación con la energía de deformación asociada a la flexión, por lo que se
puede despreciar.
La energía de deformación de membrana es denotada por Uim y la de flexión por Uib, y se
definen como:
��� = "�∬79¿ℎÅ¿ + 9ÀℎÅÀ + ¦¿ÀℎÊ¿À8§¿§À��� = "
�∬7n¿¿�¿ + nÀÀ�À + 2n¿À�¿À8§¿§À (2.123)
donde Mxx, Myy, Mxy y �¿, �À, �¿À son los momentos internos y los correspondientes cambios
de curvatura de la placa producida por la flexión. La tensión de la placa es denotada por 9¿, 9¿
y ¦¿À, y la deformación por Å¿, ÅÀ, Ê¿À.
En pequeñas deformaciones, debido a la hipótesis de que no actúan fuerzas en el plano de la
placa, el estiramiento de la placa será de un orden muy pequeño y la energía de deformación
de membrana se puede despreciar. Por tanto, el potencial total de una placa será:
�® + ��� = 0 (2.124)
Los momentos internos anteriormente mencionados son:
n¿¿ = Û 0¼$M¼¿$ + È ¼$M
¼À$ 1nÀÀ = Û 0È ¼$M
¼¿$ + ¼$M¼À$ 1
n¿À = Û(1 − È) ¼$M¼¿¼À
(2.125)
Y los cambios de curvatura de la placa son:
�¿ = ¼$M¼¿$�À = ¼$M¼À$�¿À = ¼$M¼¿¼À
(2.126)
Por tanto, la energía de flexión de la placa se puede expresar como:

PFC: Análisis modal de una placa cuadrada.
38
��� = "�∬Û E0¼$M
¼¿$ + È ¼$M¼À$ 1 ¼$M
¼¿$ + 0È ¼$M¼¿$ + ¼$M
¼À$ 1 ¼$M¼À$ + 2(1 − È) ¼$M
¼¿¼À¼$M
¼¿¼ÀG §�§_ ="�∬Û A0¼$M
¼¿$ + ¼$M¼À$ 1� − 2(1 − È) j¼$M
¼¿$¼$M¼À$ − 0 ¼$M
¼¿¼À1�kB §�§_ (2.127)
Por otro lado, el potencial de las fuerzas externas se puede escribir como:
�® = −�∬7�¿Î + �ÀÏ + ��º8§�§_ + ∑ ç�∆�� + ∑ n�Θ�� � (2.128)
donde �¿, �À, �� representan las cargas uniformemente distribuidas, ç� las cargas
concentradas y n� los momentos. Las correspondientes componentes del desplazamiento se
denotan por Î, Ï, º, ∆ y Θ, correspondiendo los tres primeros a desplazamientos y los dos
últimos a rotaciones.
En el método de Ritz la deflexión se describe en forma de series,
º(�, _) = �""�, _� + ����, _� + �FF�, _� + ⋯ + �ÞÞ�, _� (2.129)
donde ��, _� son funciones continuas que individualmente satisfacen las condiciones de
contorno geométricas. Las constantes desconocidas �", ��, ⋯ �Þ se determinan con el principio
de energía potencial mínima [18]:
¼�¼'� = 0, ¼�¼'$ = 0, ⋯ , ¼�¼'ö = 0 (2.130)
donde Π es el potencial total de la placa.
Este método se explica detalladamente en el apartado 3.1.1, que trata sobre la obtención de
modos y frecuencias de una placa empotrada en un punto central mediante este método.
3. APLICACIÓN PRÁCTICA
3.1. Métodos semi-analíticos
Este apartado se centra en la búsqueda de las frecuencias naturales y modos de vibración
mediante métodos semi-analíticos de una placa con dos condiciones de contorno diferentes.
La primera de ellas es placa con todos los bordes libres y empotrada en su punto central, y la
segunda es placa con todos los bordes libres y simplemente apoyada en sus cuatro esquinas.

PFC: Análisis modal de una placa cuadrada.
39
3.1.1. Placa empotrada en el centro. Método de Ritz.
La búsqueda de frecuencias naturales y modos de vibración de este problema por métodos
analíticos es realmente complicada. Por ello hay que usar otros métodos. Walther Ritz lo
resolvió con cálculo variacional [19]. El cálculo variacional consiste en buscar máximos y
mínimos, o más generalmente extremos relativos, de funciones continuas definidas sobre
algún espacio funcional [20].
Para resolver este problema, Ritz propuso el principio de minimización de la energía, explicado
brevemente en el capítulo 2.2.2. Otra formulación distinta de este principio a la explicada en el
apartado anterior es la que sigue. Este principio dice que la suma de la energía potencial (V) y
la energía cinética (T) debe ser constante, y que sus valores máximos (Vmax, Tmax) deben ser
iguales [21]: � + Á = ��� (3.1)
���¿ = Á��¿ (3.2)
donde [21]:
� = ÷� ∬ A0¼$M¼¿$ + ¼$M¼À$ 1� + 21 − È� j¼$M¼¿$ ¼$M¼À$ − 0 ¼$M¼¿¼À1�kB §�§_ (3.3)
Á = �$�Ä�� ∬º�§�§_ (3.4)
siendo D la rigidez a flexión, º los desplazamientos o deflexiones de la placa, È el coeficiente
de Poisson, ω la frecuencia natural en rad/s, ρ la densidad de la placa, h el espesor de la misma
y g la aceleración de la gravedad.
De acuerdo con el principio de minimización de la energía, la solución del problema de una
placa empotrada en su punto central será tal que la energía cinética debe ser constante
cuando la energía potencial tiende al mínimo [19]. El problema se plantea sujeto a las
restricciones: � → min , Á = ∬º�§�§_ = ��� (3.5)
Este problema de minimización se puede resolver usando el teorema fundamental del cálculo
variacional. Basándose en este teorema, Ritz expresó el desplazamiento exacto de la placa
como: º� = ∑ X�º��, _���^� (3.6)

PFC: Análisis modal de una placa cuadrada.
40
siendo Am las amplitudes de cada modo. No obstante, se necesita de una aproximación para
resolver este problema. La solución aproximada que Ritz propuso se basa en unas funciones
wmn y w'mn coordinadas a las que llamó "Grundfunktionen", y la solución tendrá la forma:
º� = ∑ ∑ X�Þ�Þ^� 0M�ö3M�ö� 1��^� (3.7)
definiéndose las funciones coordinadas como:
º�Þ = Î�(�)ÎÞ(_) + Î�(_)ÎÞ(�)º�Þ = Î�(�)ÎÞ(_) − Î�(_)ÎÞ(�) (3.8)
donde �(�) son las autofunciones conocidas para una barra unidimensional y libre, en la que
las condiciones de contorno deben ser ajustadas a la nueva situación.
2ÜÌ�2¿Ü = ��* Î� , 2$Ì�
2¿$ = 0 , 2ØÌ�2¿Ø = 0 , �\ � = {0, t} (3.9)
El coeficiente Km que aparece en la primera ecuación de 3.9 debe satisfacer las siguientes
ecuaciones:
C �t\��� + �t\ℎ��� = 0, � �t��t\��� − �t\ℎ��� = 0, � %��t�| (3.10)
Y las funciones um quedarán finalmente como:
Î� = � � !" ���� ! ��¿�3� ! ���� !" ��¿�,'#�Ä$���3'#�$��� , � �t�!$ò" ���!$ò ��¿�3!$ò ���!$ò" ��¿�,�®ÞÄ$���#�®Þ$��� , � %��t�| (3.11)
Con todo esto, la solución aproximada de los desplazamientos que se va a calcular, es decir, la
ecuación que se pretende resolver, tiene la forma:
º� = ∑ ∑ X�Þ�Þ^� Î���ÎÞ_���^� (3.12)
Para la resolución de la ecuación 3.12 habrá que obtener primero los valores de �� y,
posteriormente, los valores de Î���. Mencionar que el cálculo de Î�_�, ÎÞ�� y ÎÞ_� se
realiza mediante la ecuación 3.11 sustituyendo los valores de m y n, y x e y.
El siguiente paso será el cálculo de los coeficientes X�Þ. Para ello, primero se sustituye la
solución aproximada de la ecuación 3.12 en la definición de la energía potencial (3.3),
�º�� = 12%Û �eÂ�º�Â�� + Â�º�Â_� f� + 21 − È� sÂ�º�Â�� Â�º�Â_� − eÂ�º�Â�Â_f�w� §�§_

PFC: Análisis modal de una placa cuadrada.
41
= "�∬Û A0¼$M&
¼¿$ 1� + 0¼$M&¼À$ 1� + 2È ¼$M&
¼¿$¼$M&¼À$ + 2(1 − È) 0¼$M&
¼¿¼À1�B §�§_ (3.13)
Y se impone que sea mínimo bajo la condición:
Á(º�) = ∬º��§�§_ = ��� (3.14)
Para evaluar la expresión de � (ecuación 3.13) y de T (ecuación 3.14) se evalúan las integrales
término a término aplicado a una placa rectangular de dimensiones axb. Las integrales que se
realizan son en área, siendo los límites de integración-a/2 y a/2 y -b/2 y b/2.
Figura 3.1 Denominación de cada término de las dos integrales
'\�1 = ∬ 0¼$M&¼¿$ 1� §�§_ =∬ 0¼$ ∑ (�öÌ�¿�ÌöÀ��.ö ¼¿$ 1� §�§_ = ∑ ∑ X�ÞX�)�,) ∬ ¼$Ì�¿�¼¿$ ÎÞ_��,Þ ¼$�¿�¼¿$ Î)_�§�§_ =∑ ∑ X�ÞX�)�,) ��Þ�)"�,Þ (3.15)
'\�2 = ∬ 0¼$M&¼À$ 1� §�§_ = ∬ 0¼$ ∑ (�öÌ�¿�ÌöÀ��.ö ¼À$ 1� §�§_ = ∑ ∑ X�ÞX�)�,) ∬Î��� ¼$ÌöÀ�¼À$�,Þ Î��� ¼$Ì*À�¼À$ §�§_ = ∑ ∑ X�ÞX�)�,) ��Þ�)��,Þ (3.16)
'\�3 = ∬2È ¼$M&¼¿$ ¼$M&¼À$ §�§_ =∬2È ¼$ ∑ (�öÌ�¿�ÌöÀ��.ö ¼¿$ ¼$ ∑ (�öÌ�¿�ÌöÀ��.ö ¼À$ §�§_ =2È ∑ ∑ X�ÞX�)�,)�,Þ ∬ ¼$Ì�¿�¼¿$ ÎÞ_�Î��� ¼$Ì*À�¼À$ §�§_ =∑ ∑ X�ÞX�)�,)�,Þ ��Þ�)F (3.17)

PFC: Análisis modal de una placa cuadrada.
42
'\�4 = ∬21 − È� 0¼$M&¼¿¼À1� §�§_ =∬21 − È� 0¼$ ∑ (�öÌ�¿�ÌöÀ��.ö ¼¿¼À 1� §�§_ =21 − È� ∑ ∑ X�ÞX�)�,) ∬ ¼Ì�¿�¼¿ ¼ÌöÀ�¼À ¼Ì�¿�¼¿ ¼Ì*À�¼À §�§_�,Þ =∑ ∑ X�ÞX�)�,) ��Þ�)*�,Þ (3.18)
'\�5 = ∬º��§�§_ = ∬∑ X�ÞÎ���ÎÞ_��.Þ ��§�§_ =∑ ∑ X�ÞX�)�,)�,Þ = ∑ X�Þ��,Þ (3.19)
Los coeficientes ��Þ�)� de las ecuaciones anteriores pueden ser calculados si se conoce Î� y ÎÞ, ya que son integrales de estas funciones. Para mayor claridad, se van a definir a
continuación:
��Þ�)" = ∬ ¼$Ì�¿�¼¿$ ÎÞ_� ¼$�¿�¼¿$ Î)_�§�§_ (3.20)
��Þ�)� = ∬Î��� ¼$ÌöÀ�¼À$ Î��� ¼$Ì*À�¼À$ §�§_ (3.21)
��Þ�)F = ∬ ¼$Ì�¿�¼¿$ ÎÞ_�Î��� ¼$Ì*À�¼À$ §�§_ (3.22)
��Þ�)* = ∬ ¼Ì�¿�¼¿ ¼ÌöÀ�¼À ¼Ì�¿�¼¿ ¼Ì*À�¼À §�§_ (3.23)
Con todo esto, las expresiones de la energía potencial (3.13) y cinética (3.14) quedarán
finalmente como:
�º�� = "� ,'\�1 + '\�2 + '\�3 + '\�4- = "� �∑ ∑ X�ÞX�)�,) ��Þ�)"�,Þ +∑ ∑ X�ÞX�)�,) ��Þ�)��,Þ + ∑ ∑ X�ÞX�)�,)�,Þ ��Þ�)F +∑ ∑ X�ÞX�)�,) ��Þ�)*�,Þ � = "� ∑ ∑ X�ÞX�)�,) 7��Þ�)" + ��Þ�)� +�,Þ��Þ�)F + ��Þ�)* 8 (3.24)
Áº�� = '\�5 = ∑ X�Þ��,Þ (3.25)
Para minimizar se usan los multiplicadores de Langrange λ.
�º�� − λÁº�� → �%\ (3.26)
es decir,
∑ ∑ X�ÞX�)�,) 7��Þ�)" + ��Þ�)� + ��Þ�)F + ��Þ�)* 8�,Þ − λ∑ X�Þ��,Þ → �%\ (3.27)

PFC: Análisis modal de una placa cuadrada.
43
En forma matricial este problema se puede escribir como:
�X��,X�",X"�, … �����c���� c�"�� c"��� ⋯c���" c�"�" c"��" ⋯c��"�
⋮c�""�
⋮c"�"� ⋯
⋮ ⋱ ���� /X��
X�" X"� ⋮0 − λ�X��,X�",X"�, … � /X��
X�" X"� ⋮0 → �%\ (3.28)
con c��) = ���)" + ���)� + ���)F + ���)* .
Si se denomina
� = �X��,X�",X"�, … � ? = ����c���� c�"�� c"��� ⋯c���" c�"�" c"��" ⋯c��"�⋮ c�""�⋮ c"�"� ⋯⋮ ⋱ ���
� (3.29)
entonces la expresión quedará como:
�?�� − λ��� → �%\ (3.30)
Para minimizar la expresión anterior (3.30) se calcula el gradiente respecto de a y se iguala a
cero, para obtener: 1� = 4� (3.31)
La ecuación 3.21 representa un problema de autovalores discreto, ya que para cada autovalor 4� se tiene un autovector �� = ,X��� , X�"� … -, y la correspondiente autofunción:
º�� = ∑ ∑ X�Þ��Þ^� Î���ÎÞ_���^� (3.32)
El problema original se ha reducido al cálculo de integrales con el objetivo de obtener la
matriz K de Ritz, y mediante los autovalores resolver la ecuación lineal algebraica.
La expresión 3.31 se puede escribir en forma de ecuaciones lineales,
|0 = 0c����� − 4�1 X�� + c�"���X�" + c"����X"� + ⋯ + c�����X��0 = c���"�X�� + 0c�"�"� − 4�1 X�" + c"��"�X"� + ⋯ + c���"�X��⋯0 = c�����X�� + c�"���X�" + c"����X"� + ⋯ + 0c����� − 4�1 X�� ÑÒÓÒÔ
(3.33)
Debido a que Ritz tuvo que realizar los cálculos manualmente, solo pudo obtener seis valores
de las frecuencias. Sin embargo, el elevado coste computacional y la complejidad del proceso
matemático hacen que no se hayan podido obtener más de lo que obtuvo Ritz en su momento.

PFC: Análisis modal de una placa cuadrada.
44
Cabe mencionar que los seis modos de vibración con sus frecuencias asociadas calculadas por
Ritz no coinciden con los seis primeros modos de la placa empotrada en el centro. Este
fenómeno se estudiará a continuación. No obstante, se va a explicar la resolución del
problema para mejor entendimiento.
Para calcular las seis frecuencias de Ritz se necesitan conocer los seis primeros coeficientes del
vector ai (X�� , X"� , X�� , XF� ,X*� y X2� ) para cada una de ellas, que será el modo de vibración
buscado. El problema es simétrico [16], por lo que, si Î�(�) = Î�y Î�(_) = Ï�, los
coeficientes quedan determinados por:
º� = X�� Î"Ï" + X"� (Î"ÏF + ÎFÏ") + X�� ÎFÏF + XF� (Î"Ï2 + Î2Ï") + X*� (ÎFÏ2 + Î2ÏF) +X2� Î2Ï2 (3.34)
Ritz usó los subíndices 1, 3 y 5, por lo que las frecuencias que obtuvo fueron la f11, f33, f55, f13,
f15 y f35. Si suponemos que la primera frecuencia de la placa es la de menor valor, las
frecuencias anteriores serían la cuarta, décima, dieciseisava, veinteava, veintisieteava y
treintaisieteava frecuencias reales de la placa.
El sistema de ecuaciones a resolver será, por tanto,
0 = 0c""("") − 4�1 X�� + 0c""
("F) + c""(F")1 X"� + c""
(FF)X�� + 0c""("2) + c""
(2")1 XF� + 0c""(F2) +
c""(2F)8X*� + c""
(22)X2� (3.35)
0 =jg�Ø
(��)3g�(��)
� k X�� + jg�Ø(�Ø)3g�Ø
(Ø�)3gØ�(�Ø)3gØ�(Ø�)
� − 4�k X"� + jg�Ø(ØØ)3gØ�(ØØ)
� k X�� +
jg�Ø(�3)3g�Ø
(3�)3g�(�3)3g�(3�)
� k XF� + jg�Ø(Ø3)3g�Ø
(3Ø)3gØ�(Ø3)3gØ�(3Ø)
� k X*� + jg�Ø(33)3gØ�(33)
� k X2� (3.36)
0 = c��("")X�� + 0cFF
("F) + cFF(F")1 X"� + 0cFF
(FF) − 4�1 X�� + 0cFF("2) + cFF
(2")1 XF� + 0cFF(F2) +
cFF(2F)8X*� + cFF
(22)X2� (3.37)
0 = jg�3(��)3g3�(��)
� k X�� + jg�3(�Ø)3g�3(Ø�)3g3�(�Ø)3g3�(Ø�)
� k X"� + jg�3(ØØ)3g3�(ØØ)
� k X�� + jg�3(�3)3g�3(3�)3g3�(�3)3g3�(3�)
� −
4�1 XF� + jg�3(Ø3)3g�3(3Ø)3g3�(Ø3)3g3�(3Ø)
� k X*� + jg�3(33)3g3�(33)
� k X2� (3.38)

PFC: Análisis modal de una placa cuadrada.
45
0 =jgØ3(��)3g3Ø
(��)
� k X�� + jgØ3(�Ø)3gØ3(Ø�)3g3Ø(�Ø)3g3Ø
(�)
� k X"� + jgØ3(ØØ)3g3Ø(ØØ)
� k X�� + jgØ3(�3)3gØ3(3�)3g3Ø(�3)3g3Ø
(3�)
� k XF� +
jgØ3(Ø3)3gØ3(3Ø)3g3Ø(Ø3)3g3Ø
(3Ø)
� − 4�k X*� + jgØ3(33)3g3Ø(33)
� k X2� (3.39)
0 = c22("")X�� + 0c22("F) + c22(F")1 X"� + c22(FF)X�� + 0c22("2) + c22(2")1 XF� + 0c22(F2) + c22(2F)1 X*� +0c22(22) − 4�1 X2� (3.40)
Matricialmente se puede escribir de forma similar a la ecuación 3.31,
�t − 4t = 0 (3.41)
con
t = ,X�� , X"� , X�� , XF� , X*� , X2� - (3.42)
y
� =
������������ c""
("") c""("F) + c""
(F")
c"F("") + cF"
("")
2c"F
("F) + c"F(F") + cF"
("F) + cF"(F")
2
c""(FF) c""
("2) + c""(2")
c"F(FF) + cF"
(FF)
2c"F
("2) + c"F(2") + cF"
("2) + cF"(2")
2
c""(F2) + c""
(2F) c""(22)
c"F(F2) + c"F
(2F) + cF"(F2) + cF"
(2F)
2c"F
(22) + cF"(22)
2c��
("") cFF("F) + cFF
(F")
c"2("") + c2"("")
2c"2("F) + c"2(F") + c2"
("F) + c2"(F")
2
cFF(FF) cFF
("2) + cFF(2")
c"2(FF) + c2"(FF)
2c"2("2) + c"2(2") + c2"
("2) + c2"(2")
2
cFF(F2) + cFF
(2F) cFF(22)
c"2(F2) + c"2(2F) + c2"(F2) + c2"
(2F)
2c"2(22) + c2"
(22)
2cF2("") + c2F
("")
2cF2("F) + cF2(F") + c2F
("F) + c2F(F")
2c22("") c22("F) + c22(F")
cF2(FF) + c2F(FF)
2cF2("2) + cF2(2") + c2F
("2) + c2F(2")
2c22(FF) c22("2) + c22(2")
cF2(F2) + cF2(2F) + c2F(F2) + c2F
(2F)
2cF2(22) + c2F
(22)
2c22(F2) + c22(2F) c22(22) �
�����������
(3.43)
Resumiendo, para obtener las frecuencias naturales y los modos de vibración de una placa
empotrada en centro con todos sus bordes libres mediante el método de Ritz se deben seguir
los siguientes pasos:
1. Elección del número de soluciones que se quieran conocer (s), ya que m=1,2...,s y
n=1,2,...s.
2. Cálculo de los coeficientes Km a través de la ecuación 3.10.
3. Obtención de las funciones um(x) y un(y) mediante la ecuación 3.11.
4. Cálculo de los coeficientes cimnpq a través de las ecuaciones 3.20, 3.21, 3.22 y 3.23.
5. Cálculo de las componentes de la matriz K a través de la segunda ecuación de 3.29.
6. Construcción de la matriz k' a través de la ecuación 3.43.
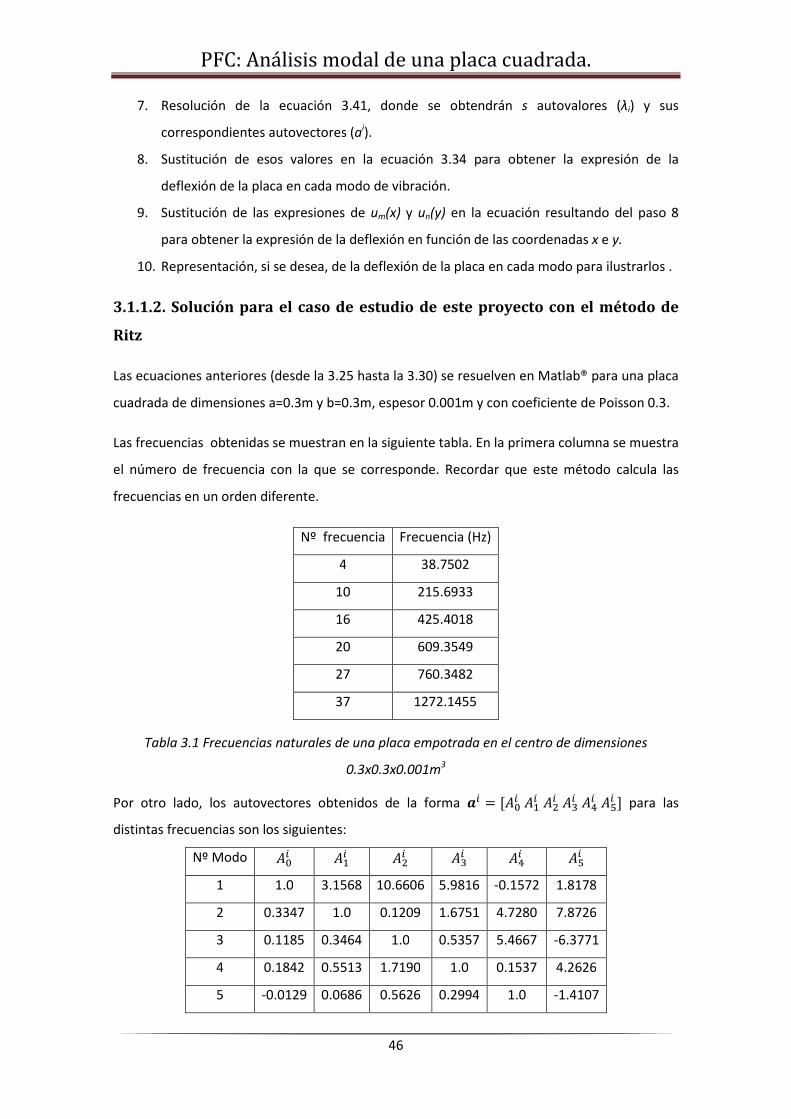
PFC: Análisis modal de una placa cuadrada.
46
7. Resolución de la ecuación 3.41, donde se obtendrán s autovalores (λi) y sus
correspondientes autovectores (ai).
8. Sustitución de esos valores en la ecuación 3.34 para obtener la expresión de la
deflexión de la placa en cada modo de vibración.
9. Sustitución de las expresiones de um(x) y un(y) en la ecuación resultando del paso 8
para obtener la expresión de la deflexión en función de las coordenadas x e y.
10. Representación, si se desea, de la deflexión de la placa en cada modo para ilustrarlos .
3.1.1.2. Solución para el caso de estudio de este proyecto con el método de
Ritz
Las ecuaciones anteriores (desde la 3.25 hasta la 3.30) se resuelven en Matlab® para una placa
cuadrada de dimensiones a=0.3m y b=0.3m, espesor 0.001m y con coeficiente de Poisson 0.3.
Las frecuencias obtenidas se muestran en la siguiente tabla. En la primera columna se muestra
el número de frecuencia con la que se corresponde. Recordar que este método calcula las
frecuencias en un orden diferente.
Nº frecuencia Frecuencia (Hz)
4 38.7502
10 215.6933
16 425.4018
20 609.3549
27 760.3482
37 1272.1455
Tabla 3.1 Frecuencias naturales de una placa empotrada en el centro de dimensiones
0.3x0.3x0.001m3
Por otro lado, los autovectores obtenidos de la forma �� = [X�� X"� X�� XF� X*� X2� - para las
distintas frecuencias son los siguientes:
Nº Modo X�� X"� X�� XF� X*� X2�
1 1.0 3.1568 10.6606 5.9816 -0.1572 1.8178
2 0.3347 1.0 0.1209 1.6751 4.7280 7.8726
3 0.1185 0.3464 1.0 0.5357 5.4667 -6.3771
4 0.1842 0.5513 1.7190 1.0 0.1537 4.2626
5 -0.0129 0.0686 0.5626 0.2994 1.0 -1.4107

PFC: Análisis modal de una placa cuadrada.
47
6 0.0330 0.1015 0.3118 0.1818 0.5361 1.0
Tabla 3.2 Valores de los autovectores para una placa empotrada en el centro de dimensiones
0.3x0.3x0.001m3
Sustituyendo estos valores en la expresión 3.24 se pueden obtener las expresiones de las
deflexiones de la placa para los distintos modos. Las ecuaciones que se muestran a
continuación están expresadas en función de ui y vi. Para expresarlo en función de x e y solo
habrá que sustituir esos términos por la definición que se dio en la ecuación 3.9.
º" = Î"Ï" + 3.1568(Î"ÏF + ÎFÏ") + 10.6606ÎFÏF + 5.9816(Î"Ï2 + Î2Ï")− 0.1572(ÎFÏ2 + Î2ÏF) + 1.8178Î2Ï2
º� = 0.3347Î"Ï" + (Î"ÏF + ÎFÏ") + 0.1209ÎFÏF + 1.6751(Î"Ï2 + Î2Ï")+ 4.728(ÎFÏ2 + Î2ÏF) + 7.8726Î2Ï2
ºF = 0.1185Î"Ï" + 0.3464(Î"ÏF + ÎFÏ") + ÎFÏF + 0.5357(Î"Ï2 + Î2Ï")+ 5.4667(ÎFÏ2 + Î2ÏF) − 6.3771Î2Ï2
º* = 0.1842Î"Ï" + 0.5513(Î"ÏF + ÎFÏ") + 1.719ÎFÏF + (Î"Ï2 + Î2Ï")+ 0.1537(ÎFÏ2 + Î2ÏF) + 4.2626Î2Ï2
º2 = −0.0129Î"Ï" + 0.0686(Î"ÏF + ÎFÏ") + 0.5626ÎFÏF + 0.2994(Î"Ï2 + Î2Ï")+ (ÎFÏ2 + Î2ÏF) − 1.4107Î2Ï2
ºÚ = 0.033Î"Ï" + 0.1015(Î"ÏF + ÎFÏ") + 0.3118ÎFÏF + 0.1818(Î"Ï2 + Î2Ï")+ 0.5361(ÎFÏ2 + Î2ÏF) + Î2Ï2
Estas expresiones representan los seis modos que calculó Ritz para la placa empotrada en el
centro.
3.1.2. Placa empotrada en el centro. Formulación acústica.
Puesto que se ha visto que con el método de Ritz no es posible calcular los cuatro primeros
modos de vibración de la placa empotrada en el centro, se va a recurrir a otro método basado
en la formulación acústica.
Antes de desarrollar la nueva formulación, cabe destacar el estudio de Ernst Florens Friedrich
Chandli, científico alemán, con el que obtuvo las deformadas de una placa cuadrada
empotrada en el centro. El experimento lo realizó colocando polvo fino de color en la placa, y
produciendo vibraciones con un violín. Al producirse la onda sonora, esta se transmitía por la

PFC: Análisis modal de una placa cuadrada.
48
placa creando ondas estacionarias sobre ella. Las ondas estacionarias tienen la particularidad
de presentar zonas de vibración nula (líneas modales) y zonas de amplitud máxima. Con esto,
pudo dibujar los modos de vibración, los cuales se muestran a continuación. Al igual que el
método de Ritz, estos modos están ordenados según dos índices, y el orden no coincide con el
normal establecido. Sin embargo, sí coinciden el método de Ritz con los experimentos de
Chandli.
Figura 3.2 Figuras de Chandli
La formulación acústica consiste en representar la ecuación de onda en 2D. Esta ecuación para
una placa es la siguiente [22],
"'$ ¼$8¿,À,��¼�$ = ¼$8¿,À,��¼¿$ + ¼$8¿,À,��¼À$ (3.44)
Siendo c la velocidad de la onda en la placa y U el desplazamiento perpendicular a la placa de
un punto situado en las coordenadas x,y para cualquier instante t.

PFC: Análisis modal de una placa cuadrada.
49
Para resolver la ecuación 3.44 se vuelve a usar un método de separación de variables. Para
ello, se supone que para pequeños desplazamientos la solución está desacoplada:
� = �(�)� = �(_)Á = Á(�� (3.45)
Por lo que el desplazamiento queda como:
��, _, �� = ����_�Á�� (3.46)
Derivando respecto a cada una de las variables,
¼$8¿,À,��¼¿$ = �_�Á�� ¼$ ¿�¼¿$¼$8¿,À,��¼À$ = ���Á�� ¼$9À�¼À$¼$8¿,À,��¼�$ = ����_� ¼$���¼�$ (3.47)
Y sustituyendo estas expresiones en la ecuación 3.44 queda,
"'$ ����_� ¼$���¼�$ = �_�Á�� ¼$ ¿�¼¿$ + ���Á�� ¼$9À�¼À$ (3.48)
Reordenando términos:
�:$;$³±�;±$��� = ;$<½�;½$ ¿� + ;$=¾�;¾$9À� (3.49)
Ambos lados de las ecuaciones son independientes el uno del otro, por lo que ambos son
iguales a una constante denominada −��:
�:$;$³±�;±$��� = −��;$<½�;½$ ¿� + ;$=¾�;¾$9À� = −�� (3.50)
En la segunda ecuación de 3.50 ocurre lo mismo, ambos términos son independientes el uno
del otro, por lo que se opera de la misma forma:

PFC: Análisis modal de una placa cuadrada.
50
;$<(½);½$
(¿) = −�"�
;$=(¾);¾$9(À) = −���
−(�"� + ���) = −��
(3.51)
Por tanto, las soluciones que se obtienen son las siguientes [22]:
Á(�� = �"�±�'����� = ���±�'��¿�_� = �F�±�'�$À (3.52)
Donde se puede reescribir conjuntamente [22]:
� = > |�®Þ'#�I �"� |�®Þ'#�I ��_ |�®Þ'#�I ��� (3.53)
siendo R una constante, e indicando los corchetes que la solución puede ser tanto senos como
cosenos.
Las condiciones de contorno de la placa se limitan a empotrar el punto central, es decir, anular
los desplazamientos en ese punto. Por otro lado, se asume que inicialmente la placa estará en
reposo. Introduciendo estas condiciones, y teniendo en cuenta que a y b son las dimensiones
de la placa, el problema queda:
"'$ ¼$8¿,À,��¼�$ = ¼$8¿,À,��¼¿$ + ¼$8¿,À,��¼À$ ; 0 < � < t, 0 < _ < x, � > 0� 0�� , �� , �1 = 0 ; � > 0��, _, 0� = 0 ; 0 < � < t, 0 < _ < x¼8¿,À,��¼� = 0 ; 0 < � < t, 0 < _ < x (3.54)
Aplicando la condición de contorno a la solución de la ecuación 3.53,
� = > |�®Þ'#�I �" �� |�®Þ'#�I �� �� |�®Þ'#�I ��� = 0 (3.55)
El último término no tiene porqué ser siempre cero, por lo que los dos primeros deben serlo
independientemente:
|�®Þ'#�I �" �� = 0|�®Þ'#�I �� �� = 0 (3.56)

PFC: Análisis modal de una placa cuadrada.
51
Por otro lado, se cumple que:
Z�\ 0�"��1 = 0 → �" = ��á
�Z�\ 0��
��1 = 0 → �� = �Þá
� (3.57)
donde m y n son factores integrantes, resultando la solución del problema, sin pérdida de
generalidad [22]:
� = Z�\ 0�á¿� 1 Z�\ 0ÞáÀ
� 1 |�®Þ'#�I ��� (3.58)
Si se considera ahora la última ecuación de 3.54, se ve que en el momento inicial la placa no
tiene velocidad, es decir:
¼8¿,À,��¼� = 0 → ¼¼� |�®Þ'#�I ��� = 0 �t�t � = 0 (3.59)
Para que la condición anterior se cumpla, el término dependiente del tiempo debe ser un
coseno, por lo que la solución quedará:
� = Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 cos ���� (3.60)
Teniendo en cuenta que :
¼$8¿,À,��¼�$ = −����>Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 �YZ���� = −�����¼$8¿,À,��¼�$ = − 0�á� 1� >Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 cos���� = − 0�á� 1� �¼$8¿,À,��¼�$ = − 0Þá� 1� >Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 cos���� = − 0Þá� 1� � (3.61)
e introduciendo esta solución en la ecuación de onda (3.44), se obtiene:
#'��$8'$ = −� A0�á� 1� + 0Þá� 1�B → ���� = ý��� A0�� 1� + 0Þ�1�B (3.62)
Por lo que la solución será:
� = Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 cos ���� (3.63)
donde ���� = ý��� A0�� 1� + 0Þ�1�B, siendo ck la frecuencia del movimiento.
La solución general se deriva de la ecuación 3.63, quedando [22],
� = ∑ ∑ Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 ,X�Þ cos��� + [�Þ sen����-Þ→âÞ^"�→â�^" (3.64)

PFC: Análisis modal de una placa cuadrada.
52
donde:
X�Þ = *�� ¥ ¥ Î�Z�\ 0�á¿
� 1 Z�\ 0ÞáÀ� 1�
��
� §�§_[�Þ = *��'� ¥ ¥ Î� �Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1���� §�§_ (3.65)
Los coeficientes Amn y Bmn proceden de una solución que defina la posición u0 y la velocidad Î� �
iniciales [22].
De la ecuación general de la solución (3.64), se deduce que si para cualquier punto de la placa
la parte dependiente de x y la dependiente de y son constantemente cero, para cualquier
tiempo t, el desplazamiento de ese punto será cero. Este es el sentido de un punto nodal, el
cual cumple que:
Z�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 = 0 (3.66)
donde la relación entre x e y depende del valor de m y n.
En algunos casos deberían ser otro par de factores integrantes, por ejemplo, p y q, los que se
introduzcan en la ecuación y den otro patrón nodal. Por tanto, el patrón general que aparece
es una mezcla de los patrones individuales puros [22].
qZ�\ 0�á¿� 1 Z�\ 0ÞáÀ� 1 + ÛZ�\ 0�á¿� 1 Z�\ 0)áÀ� 1 = 0 (3.67)
donde C y D son constantes.
En particular, cuando a y b son iguales, la ecuación anterior se puede reescribir como [22]:
� = q�YZ 0�á¿� 1 �YZ 0ÞáÀ� 1 + Û�YZ 0�á¿� 1 �YZ 0)áÀ� 1 (3.68)
Con la expresión 3.68 es con la que se consigue las líneas modales [22], y son las que se
utilizarán, por tanto, para dibujar los modos.
Para el cálculo de las frecuencias naturales se usa la siguiente expresión [19]:
��Þ = 4�Þ� 0 ÷�Ä1�.2 (3.69)
siendo D la rigidez a flexión de la placa, ρ la densidad del material y h espesor.

PFC: Análisis modal de una placa cuadrada.
53
Los valores de 4�\2 = �c� + d� son tales que anulan una serie de senos y cosenos, de la
forma [19]:
c = �ýt Y c = �ý2td = \ýx Y d = \ý2x
3.1.2.1. Solución para el caso de estudio de este proyecto con la formulación
acústica
Se desean obtener los primeros cuatros modos de vibración con sus frecuencias asociadas de
una placa empotrada en el centro de acero de dimensiones 0.3x0.3x0.001m3.
El primer modo con su frecuencia no se puede detectar con este método puesto que la placa
no se deforma, solo se desplaza. Al no deformarse, no se crea una onda estacionaria, por lo
que la ecuación de onda no detecta el modo. Por otro lado, el segundo, tercer y cuarto modo
son:
• El segundo modo es la suma del comportamiento puro de la placa cuando m=2, n=0 y
p=0, q=2, por lo que el desplazamiento será:
�� = �YZ j2ý�t k + �YZ j2ý_t k
• El tercer modo se corresponde con la suma de los comportamientos puros de la placa
cuando m=1, n=1 y p=1, q=1, por lo que el desplazamiento será:
�F = �YZ 0ý�t 1 �YZ 0ý_t 1 + �YZ 0ý�t 1 �YZ 0ý_t 1
• El cuarto modo es la resta del comportamiento puro de la placa cuando m=2, n=0 y
p=0, q=2, por lo que el desplazamiento será:
�* = �YZ j2ý�t k − �YZ j2ý_t k
A continuación se representan los tres modos mencionados.
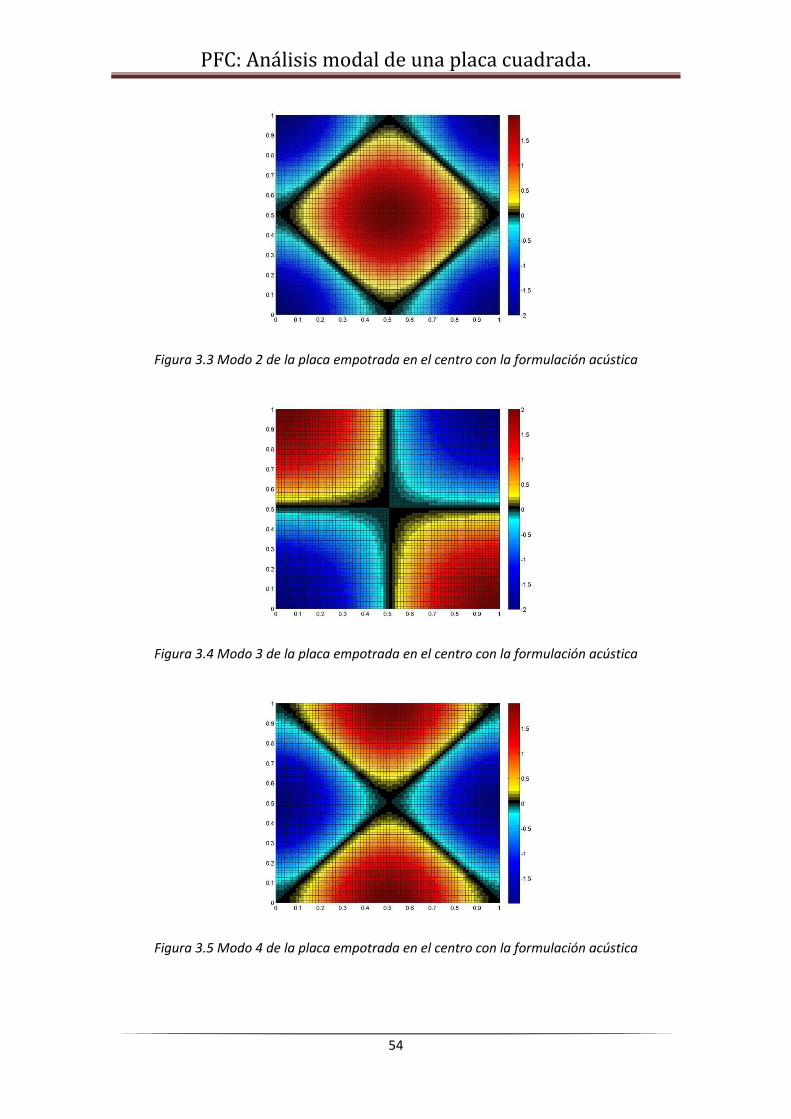
PFC: Análisis modal de una placa cuadrada.
54
Figura 3.3 Modo 2 de la placa empotrada en el centro con la formulación acústica
Figura 3.4 Modo 3 de la placa empotrada en el centro con la formulación acústica
Figura 3.5 Modo 4 de la placa empotrada en el centro con la formulación acústica

PFC: Análisis modal de una placa cuadrada.
55
Para el cálculo de las frecuencias se necesita conocer la rigidez a flexión de la placa y la
densidad del material. Además, es necesario calcular los parámetros 4��� , 4""� y 4��� .
La densidad del acero de la placa es 7850kg/m3. Por otro lado, teniendo en cuenta que el
módulo de Young (E) del material de la placa es 210GPa y el coeficiente de Poisson (ν) 0.3, la
rigidez a flexión será:
Û = ÇÄØ"�("#É$� = 19.23B (3.70)
El cálculo de los parámetros 4��� , 4""� y 4��� es:
4��� = j2ý2xk� = 0 ý0.31� = 109.664""� = 0ýt1� + 0 ý2x1� = 0 ý0.31� + 0 ý2 ∙ 0.31� = 137.08
4��� = 2 j2ý2tk� = 2 j 2ý2 ∙ 0.3k� = 219.32
Por lo que las frecuencias naturales serán:
Frecuencia (rad/s) Frecuencia (Hz)
f2 171.62 27.31
f3 214.53 34.15
f4 343.24 54.63
Tabla 3.3 Frecuencias naturales para una placa empotrada en el centro de dimensiones
0.3x0.3x0.001m3 (Formulación acústica)
3.1.3. Placa con las esquinas simplemente apoyadas
Una solución exacta de la ecuación diferencial de una placa bajo estas condiciones de contorno
es difícil de obtener. Por tanto, habrá que optar por otros métodos para obtener una solución
aproximada.
Este problema se puede resolver con diferentes métodos. Algunos autores, como Kirk [21] y
Reed [23], lo resolvieron con el método de Rayleigh-Ritz. Sin embargo, otros autores, como
Cox y Boxer [24] o Nishimura [25], prefieren el método de las diferencias finitas.

PFC: Análisis modal de una placa cuadrada.
56
En primer lugar se ha usado el método de las diferencias finitas que desarrollaron Hugh L. Cox
y Jack Boxer. Para la aplicación de este método se asumen las hipótesis básicas de la teoría de
placas. La ecuación diferencial de una placa (ecuación 2.87) se puede escribir de la forma:
∇�∇�º(�, _) = �Ä�$÷ º(�, _) (3.71)
donde w(x,y) es la deflexión de la placa, ρ la densidad, h el espesor, ω la frecuencia natural en
rad/s y D la rigidez a flexión.
Esta ecuación debe ser expresada en forma de diferencias finitas en un determinado número
de puntos de la placa. Para ello la placa se divide en porciones de tamaño H creando una malla
de nodos. Al hacer esta transformación, se obtiene una ecuación algebraica lineal a partir de la
ecuación diferencial anterior. Esta ecuación en forma matricial se escribe como [24]:
(\*X − 4�')º′ = 0 (3.72)
Figura 3.6 Tipo de placa considerada
siendo n=a/H, A la matriz de coeficientes del primer término de la ecuación 3.71, a la longitud
de la placa, I una matriz identidad, w' una columna de la matriz de deflexiones y
4� = �Ä�$̄�Ü÷ (3.73)
Por consiguiente, el valor de la frecuencia natural será:
�� = \�,4�� ÷�Ä�Ü = ��� ÷�Ä�Ü (3.74)
Esta expresión es válida para diversas condiciones de contorno y geometrías [25].

PFC: Análisis modal de una placa cuadrada.
57
Para una placa cuadrada, en la que a/b=1, la malla considerada se representa en la siguiente
figura [24]. Los números representan los nodos de la malla.
Figura 3.7 Mallado para una placa cuadrada
La ecuación 3.72 la resolvieron Cox y Boxer computacionalmente [24]. Dependiendo del valor
que se le dé a n se obtendrán valores distintos de 4. El valor de n definirá la resolución de la
malla. Cuanto mayor sea, más exacta será la solución. No obstante, el problema de estudio es
sencillo y no es necesario que sea muy grande. Por ello se calculan los valores para n igual a 4 y
a 6, valores que Cox y Boxer decidieron como óptimos, y se extrapolan con la fórmula de
Richardon [27]:
FÚ7�¯ÞÜ8D#"Ú7�¯ÞÜ8ÜFÚ#"Ú = ��� (3.75)
Realizando estos cálculos para las cuatro primeras frecuencias para un material con coeficiente
de Poisson igual a 0.3 (el parámetro 4� depende de D y este, a su vez, de ν) se obtiene la
siguiente tabla:
Frecuencia n 4� 4�\* ��� �� 1
4 0.190281 48.7119 50.6467 7.117
6 0.038416 49.7868
2 4 0.362601 226.625
247.549 15.73 6 0.179798 233.019
3 4 0.453258 283.286
366.007 19.13 6 0.238087 308.562
4 4 2.02722 1267.01 1476.40 38.42

PFC: Análisis modal de una placa cuadrada.
58
6 1.02700 1330.99
6 1.25090 1621.17
Tabla 3.4 Coeficiente de frecuencia para una placa cuadrada con ν=0.3
Cox y Boxer [24] también dan los valores de las amplitudes en los distintos nodos de la malla
de la placa. A continuación se representan los de los cuatro primeros modos normalizados de
vibración.
Nodo Número de modo
1 2a 2b 2c 3 4
1 0.34407 0.52207 0.42800 0.50302 0.48159 0.82466
2 0.58825 0.88521 0.79707 0.86736 0.85688 0.79791
3 0.67600 1.0 1.0 1.0 1.0 0
4 0.58825 0.84951 0.93765 0.86736 0.85688 -0.79791
5 0.34407 0.48397 0.57804 0.50302 0.48159 -0.82466
6 0.34407 0.20274 -0.42800 0.07502 -0.48159 0.82466
7 0.58026 0.47548 0 0.37920 0 1.0
8 0.75981 0.66279 0.39652 0.60887 0.36362 0.73369
9 0.82616 0.69381 0.69381 0.69381 0.50055 0
10 0.75981 0.55495 0.82122 0.60887 0.36362 -0.73369
11 0.58026 0.28292 0.75841 0.37920 0 -1.0
12 0.34407 -0.05269 0.57804 0.07502 -0.48159 -0.82466
13 0.58825 0.29050 -0.79707 0.07029 -0.85688 0.79791
14 0.75981 0.36694 -0.39652 0.21235 -0.36362 0.73369
15 0.89905 0.40496 0 0.32296 0 0.47978
16 0.95183 0.36438 0.36438 0.36438 0.13585 0
17 0.89905 0.24096 0.64592 0.32296 0 -0.47978
18 0.75981 0.05776 0.82122 0.21235 -0.36362 -0.73369
19 0.58825 -0.14994 0.93765 0.07029 -0.85688 -0.79791
20 0.67600 0.25390 -1.0 0 -1.0 0
21 0.82616 0.17616 -0.69381 0 -0.50055 0
22 0.95183 0.09251 -0.36438 0 -0.13585 0
23 1.0 0 0 0 0 0
24 0.95183 -0.09251 0.36438 0 -0.13585 0

PFC: Análisis modal de una placa cuadrada.
59
25 0.82616 -0.17616 0.69381 0 -0.50055 0
26 0.67600 -0.25390 1.0 0 -1.0 0
27 0.58825 0.14994 -0.93765 -0.07029 -0.85688 -0.79791
28 0.75981 -0.05776 -0.82122 -0.21235 -0.36362 -0.73369
29 0.95183 -0.24096 -0.64592 -0.32296 0 -0.47978
30 0.95183 -0.36438 -0.36438 -0.36438 0.13585 0
31 0.89905 -0.40496 0 -0.32296 0 0.47978
32 0.75981 -0.36694 0.39652 -0.21235 -0.36362 0.73369
33 0.58825 -0.29050 0.79707 -0.07029 -0.85688 0.79791
34 0.34407 0.05269 -0.57804 -0.07502 -0.48159 -0.82466
35 0.58026 -0.28292 -0.75841 -0.37920 0 -1.0
36 0.75981 -0.55495 -0.82122 -0.60887 0.36362 -0.73369
37 0.82616 -0.69381 -0.69381 -0.69381 0.50055 0
38 0.75981 -0.66279 -0.39652 -0.60887 0.36362 0.73369
39 0.58026 -0.47548 0 -0.37920 0 1.0
40 0.34407 -0.20274 0.42800 -0.07502 -0.48159 0.82466
41 0.34407 -0.48397 -0.57804 -0.50302 0.48159 -0.82466
42 0.58825 -0.84951 -0.93765 -0.86736 0.85688 -0.79791
43 0.67600 -1.0 -1.0 -1.0 1.0 0
44 0.58825 -0.88521 -0.79707 -0.86736 0.85688 0.79791
45 0.34407 -0.52207 -0.42800 -0.50302 0.48159 0.82466
Tabla 3.5 Amplitudes de los cuatro primeros modos normalizados
Se observa como en la tabla 3.5 aparecen tres modos distintos para la segunda frecuencia (2a,
2b y 2c). Esto es un hecho inusual, ya que aparecen un número infinito de modos de vibración
para la segunda frecuencia natural, aunque solo se haya ilustrado tres de ellos. Este fenómeno
puede ser resultado de un error matemático en el método de resolución (método de las
diferencias finitas) [24].
Los primeros cuatro modos se dibujan a continuación en Matlab® asignando a cada nodo el
desplazamiento que establecieron Cox y Boxer en la tabla anterior.

PFC: Análisis modal de una placa cuadrada.
60
Figura 3.8 Modo 1 de placa cuadrada simplemente apoyada en las esquinas aplicando el
método de Cox y Boxer
Figura 3.9 Modo 2 de placa cuadrada simplemente apoyada en las esquinas aplicando el
método de Cox y Boxer
Figura 3.10 Modo 3 de placa cuadrada simplemente apoyada en las esquinas aplicando el
método de Cox y Boxer
Figura 3.11 Modo 4 de placa cuadrada simplemente apoyada en las esquinas aplicando el
método de Cox y Boxer

PFC: Análisis modal de una placa cuadrada.
61
En párrafos anteriores se mencionó que otro autor, llamado Nishimura [24], también usó el
método de las diferencias finitas para resolver este problema. A continuación se representan
los valores de los coeficientes �� y la forma de los modos, donde las líneas discontinuas
representan líneas modales (con desplazamiento nulo) para las primeras cuatro frecuencias.
1 2 3 4
�� 7.442 16.74 20.17 40.62
Tabla 3.6 Frecuencias naturales de una placa apoyada en sus esquinas según Nishimura
Figura 3.12 Modos de vibración de una placa apoyada en sus esquinas según Nishimura
3.1.2.1. Solución para el caso de estudio de este proyecto
Se va a usar el procedimiento propuesto por Cox y Boxer basado en el método de las
diferencias finitas para el cálculo de las frecuencias naturales de una placa cuadrada de acero
de dimensiones 0.3x0.3x0.001m3 simplemente apoyada en las esquinas. Según la ecuación
3.47, para el cálculo de las frecuencias se necesita conocer la densidad de la placa (7850kg/m3)
y la rigidez a flexión, calculada anteriormente en la ecuación 3.70 (19.23J).
Ya se pueden calcular las frecuencias con el método de Cox y Boxer, las cuales se muestran en
la siguiente tabla.
Nº Frecuencia Ki ωi(rad/s) fi(Hz)
1 7.117 123.76 19.70
2 15.73 273.55 43.54
3 19.13 332.67 52.95
4 38.42 668.12 106.33
Tabla 3.7 Frecuencias naturales para una placa apoyada en sus esquinas de dimensiones
0.3x0.3x0.001m3 (Método de Cox y Boxer)
Si se usara el método de Nishimura, los resultados serían los presentados a continuación.
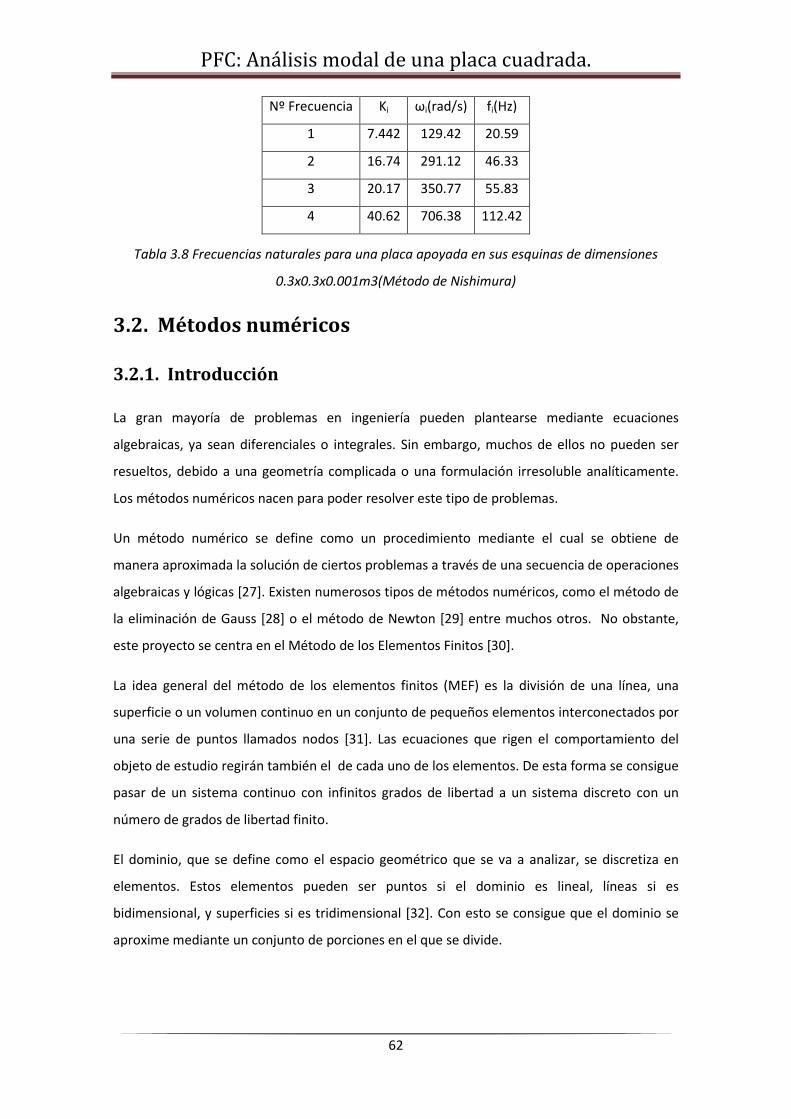
PFC: Análisis modal de una placa cuadrada.
62
Nº Frecuencia Ki ωi(rad/s) fi(Hz)
1 7.442 129.42 20.59
2 16.74 291.12 46.33
3 20.17 350.77 55.83
4 40.62 706.38 112.42
Tabla 3.8 Frecuencias naturales para una placa apoyada en sus esquinas de dimensiones
0.3x0.3x0.001m3(Método de Nishimura)
3.2. Métodos numéricos
3.2.1. Introducción
La gran mayoría de problemas en ingeniería pueden plantearse mediante ecuaciones
algebraicas, ya sean diferenciales o integrales. Sin embargo, muchos de ellos no pueden ser
resueltos, debido a una geometría complicada o una formulación irresoluble analíticamente.
Los métodos numéricos nacen para poder resolver este tipo de problemas.
Un método numérico se define como un procedimiento mediante el cual se obtiene de
manera aproximada la solución de ciertos problemas a través de una secuencia de operaciones
algebraicas y lógicas [27]. Existen numerosos tipos de métodos numéricos, como el método de
la eliminación de Gauss [28] o el método de Newton [29] entre muchos otros. No obstante,
este proyecto se centra en el Método de los Elementos Finitos [30].
La idea general del método de los elementos finitos (MEF) es la división de una línea, una
superficie o un volumen continuo en un conjunto de pequeños elementos interconectados por
una serie de puntos llamados nodos [31]. Las ecuaciones que rigen el comportamiento del
objeto de estudio regirán también el de cada uno de los elementos. De esta forma se consigue
pasar de un sistema continuo con infinitos grados de libertad a un sistema discreto con un
número de grados de libertad finito.
El dominio, que se define como el espacio geométrico que se va a analizar, se discretiza en
elementos. Estos elementos pueden ser puntos si el dominio es lineal, líneas si es
bidimensional, y superficies si es tridimensional [32]. Con esto se consigue que el dominio se
aproxime mediante un conjunto de porciones en el que se divide.
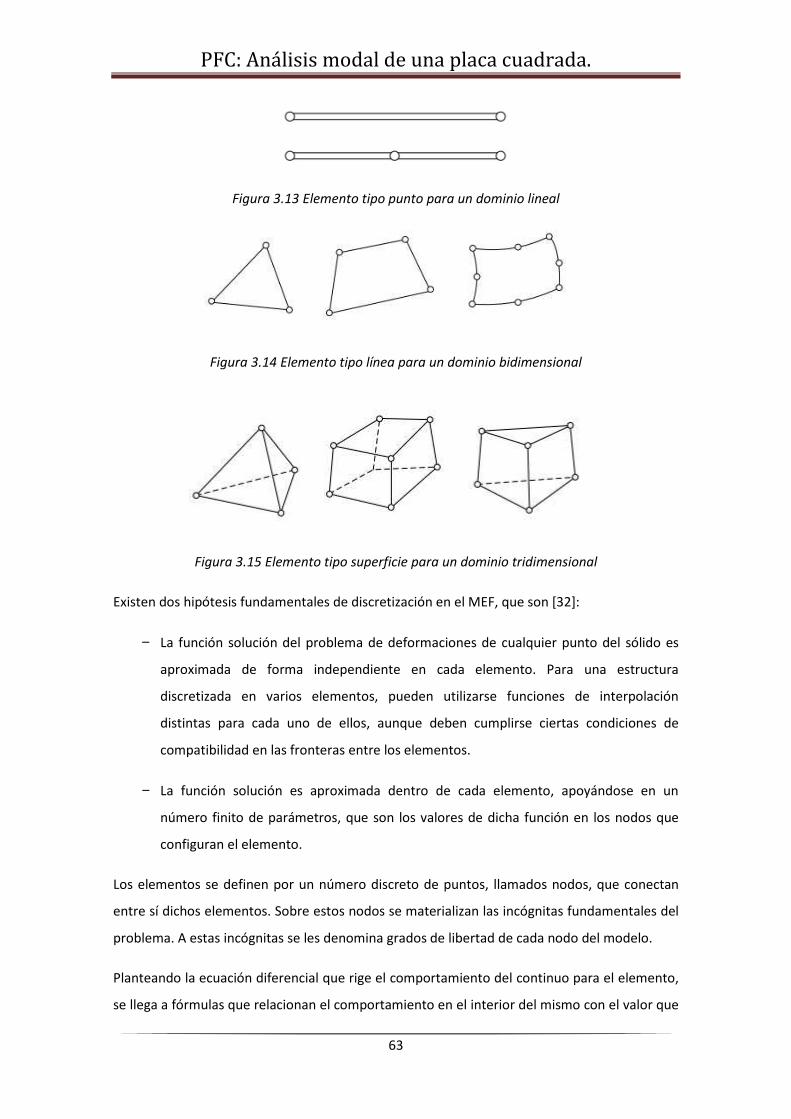
PFC: Análisis modal de una placa cuadrada.
63
Figura 3.13 Elemento tipo punto para un dominio lineal
Figura 3.14 Elemento tipo línea para un dominio bidimensional
Figura 3.15 Elemento tipo superficie para un dominio tridimensional
Existen dos hipótesis fundamentales de discretización en el MEF, que son [32]:
− La función solución del problema de deformaciones de cualquier punto del sólido es
aproximada de forma independiente en cada elemento. Para una estructura
discretizada en varios elementos, pueden utilizarse funciones de interpolación
distintas para cada uno de ellos, aunque deben cumplirse ciertas condiciones de
compatibilidad en las fronteras entre los elementos.
− La función solución es aproximada dentro de cada elemento, apoyándose en un
número finito de parámetros, que son los valores de dicha función en los nodos que
configuran el elemento.
Los elementos se definen por un número discreto de puntos, llamados nodos, que conectan
entre sí dichos elementos. Sobre estos nodos se materializan las incógnitas fundamentales del
problema. A estas incógnitas se les denomina grados de libertad de cada nodo del modelo.
Planteando la ecuación diferencial que rige el comportamiento del continuo para el elemento,
se llega a fórmulas que relacionan el comportamiento en el interior del mismo con el valor que

PFC: Análisis modal de una placa cuadrada.
64
tomen los grados de libertad nodales. Este paso se realiza por medio de unas funciones
llamadas de interpolación, ya que éstas interpolan el valor de la variable nodal dentro del
elemento.
El problema se formula en forma matricial debido a la facilidad de manipulación de las
matrices mediante ordenador. Conocidas las matrices que definen el comportamiento del
elemento (matrices de rigidez, amortiguamiento y masa), se ensamblan y se forma un
conjunto de ecuaciones algebraicas que, resolviéndolas, proporcionan los valores de los grados
de libertad en los nodos del sistema.
Por otra parte, el análisis del MEF debe ser convergente, es decir, que al disminuir el tamaño
de los elementos y, por tanto, aumentar el número de nodos y de elementos, la solución
obtenida debe tender a la solución exacta. Las funciones de interpolación elegidas para
representar el estado de deformación de un medio continuo deben satisfacer una serie de
condiciones para que se cumpla la convergencia. Estas condiciones son:
− Las funciones de interpolación deben ser capaces de representar los desplazamientos
como sólido rígido sin producir tensiones en el elemento. Esta condición es evidente,
pues todo sólido que se desplaza como un sólido rígido no sufre ninguna deformación
ni, por lo tanto, tensión.
− Las funciones de interpolación deben ser tales que, cuando los desplazamientos de los
nodos correspondan a un estado de tensión constante, este estado tensional se
alcance en realidad en el elemento. Este criterio exige que los elementos sean capaces
de representar dicho estado de tensión constante. A los elementos que satisfacen los
dos primeros criterios se les llama elementos completos.
− Debe existir continuidad de desplazamientos en la unión entre elementos aunque
puede haber discontinuidad en las deformaciones unitarias y, por tanto, en las
tensiones, ya que son proporcionales a ellas.
3.2.2. Procedimiento de resolución usando el MEF
Uno de los software más usados para la resolución de problemas mediante el MEF es el
programa comercial Ansys®. Este es un programa de aplicación general para el cálculo con
elementos finitos que puede resolver problemas estructurales, térmicos, eléctricos,
magnéticos y de fluidos entre muchos otros.
PFC: Análisis modal de una placa cuadrada.
65
Para resolver problemas de análisis modal con Ansys® el procedimiento a seguir es el
siguiente:
1. Módulo de pre-procesado (Preprocessor).
I. Elegir el tipo de elemento a usar para discretizar el dominio.
II. Definir las propiedades del material (módulo de Young, coeficiente de Poisson,
etc.) y algún otro parámetro si fuera necesario (espesor, temperatura, tipo de
material, etc.).
III. Especificar la geometría del objeto de estudio.
IV. Mallar el objeto, proceso que consiste en dividir el dominio en los elementos
especificados y crear la malla.
2. Módulo de resolución (Solution).
I. Generar la solución, especificando el tipo de análisis que se desea.
II. Aplicar las condiciones de contorno y las cargas externas, si las hubiera.
III. Resolver el problema.
3. Módulo de post-procesado. (General Postproc).
I. Interpretar los resultados.
3.2.3. Aplicación práctica
Para resolver el problema de análisis modal de este proyecto se han de seguir los pasos
anteriormente enumerados.
En primer lugar se debe elegir el tipo de elemento para discretizar el objeto de estudio. En el
caso de este proyecto, el objeto es una placa cuadrada delgada, ya que dos de sus dimensiones
son mucho mayores que la tercera. Por tanto, se necesitará un elemento tipo área. Un
elemento área puede tener forma triangular o cuadrilátera y ser un elemento sólido
bidimensional o un elemento lámina. Los distintos tipos de este elemento con los que cuenta
Ansys® son [33]:

PFC: Análisis modal de una placa cuadrada.
66
• PLANE42: elemento de 4 nodos, con dos grados de libertad en las direcciones del
plano. Se usa para lajas elásticas.
• PLANE82: elemento de 8 nodos, con dos grados de libertad en las direcciones del
plano. Al igual que el otro elemento plane, se usa para lajas elásticas.
• SHELL63: elemento de 4 nodos, con seis grados de libertad. Se usa para placas.
• SHELL93: elemento de 8 nodos, con seis grados de libertad. Se usa para placas.
Las placas y lajas son elementos estructurales que se pueden aproximar por una superficie
bidimensional y que trabajan predominantemente a flexión. La diferencia entre una laja y una
placa reside en la curvatura. Las placas son elementos cuya superficie media es plano,
mientras que las lajas son superficies curvadas en el espacio tridimensional [34].
La estructura de estudio se asemeja más a una placa que a una laja elástica. Por tanto, el
elemento shell es más recomendable que el plane. Entre los dos elementos tipo shell que
existen, se elige el de cuatro nodos, pues es suficiente para el tipo de análisis que se va a
realizar y para la sencilla geometría de la placa.
El siguiente paso es definir las propiedades del material. Se necesita conocer los siguientes
datos:
− Longitud y ancho de la placa: a=0.3m , b=0.3m
− Módulo de Young en todas las direcciones: Ex=Ey=Ez=2.1·1011
Pa
− Coeficiente de Poisson en todas las direcciones: νx=νy=νz=0.3

PFC: Análisis modal de una placa cuadrada.
67
− Espesor de la placa: e=0.001m
El material se considera isótropo, por ello el coeficiente de Poisson y el módulo de Young es el
mismo en todas las direcciones.
Una vez definidos todos los parámetros y las constantes hay que especificar la geometría de la
placa. Para ello se especifican los cuatro puntos de las esquinas y el área que definen. En la
siguiente figura se puede ver la geometría de la placa.
Con el objetivo de obtener la solución del problema hay que mallar todas las áreas definidas.
Para ello, se discretizan las líneas en 40 elementos, y se crea una malla que los une. Se
obtienen un total de 1600 nodos. Es sobre estos nodos donde se definen las incógnitas del
sistema y donde Ansys® calcula la solución.
El tipo de análisis a realizar es, como ya se ha mencionado con anterioridad, un análisis modal.
En este punto se deben especificar el número de frecuencias naturales y modos de vibración
que se quieren obtener. Se han estudiado las cuatro primeras frecuencias tanto en el caso de
la placa empotrada en el centro como en el de la placa apoyada en las esquinas, pues son los
casos analizados con el resto de métodos.
Antes de resolver hay que aplicar las condiciones de contorno y las cargas externas. En este
proyecto se han estudiado dos condiciones de contorno diferentes, que son:
1) Placa empotrada en su punto central. Las condiciones de contorno a aplicar serán
desplazamientos y rotaciones nulas en dicho nodo. En Ansys® esto se traduce como:
|��|"F = |��|"F = |�E|"F = 0 |>FÁ�|"F = |>FÁ�|"F = |>FÁE|"F = 0
2) Placa apoyada en sus cuatro esquinas. Esto significa que tiene los desplazamientos
prohibidos y los giros permitidos en estos cuatro nodos, es decir:
|��|" = |��|" = |�E|" = 0|��|2 = |��|2 = |�E|2 = 0|��|�" = |��|�" = |�E|�" = 0|��|�Ú = |��|�Ú = |�E|�Ú = 0
Por otro lado, también hay que especificar las cargas externas aplicadas en la placa.

PFC: Análisis modal de una placa cuadrada.
68
Al ser un análisis modal, teóricamente no debería haber cargas externas, puesto que para este
tipo de análisis se considera que la única fuerza que actúa es el propio peso de la placa. Por
ello se realizará un análisis donde no haya ninguna fuerza externa actuando.
Es importante destacar que las fuerzas externas se aplican en los nodos que forman la malla, y
no en los puntos de la geometría, ya que es en los primeros donde se genera la solución.
Es en este momento cuando se puede resolver el problema. Se obtendrán una lista con las
frecuencias naturales y la representación las deformadas para cada modo.
3.2.3.1. Placa empotrada en el centro
Tal y como se dijo anteriormente, se han estudiado las primeras cuatro frecuencias naturales
con sus respectivos modos de vibración.
A continuación se representan las deformadas en la dirección perpendicular a la placa (pues
son estas las que se van a poder comparar con los modos obtenidos experimentalmente, como
se explica en apartados posteriores). Cabe destacar que existe un modo de vibración anterior
al primero que se representa, de frecuencia 0.83Hz, pero no tiene interés en este proyecto
debido a que no tiene desplazamientos perpendiculares a la placa, ya que gira en el plano de
esta.
Figura 3.16 Deformada de una placa cuadrada empotrada en el centro asociados a su primera
frecuencia natural

PFC: Análisis modal de una placa cuadrada.
69
Figura 3.17 Deformada de una placa cuadrada empotrada en el centro asociados a su segunda
frecuencia natural
Figura 3.18 Deformada de una placa cuadrada empotrada en el centro asociados a su tercera
frecuencia natural
Figura 3.19 Deformada de una placa cuadrada empotrada en el centro asociados a su cuarta
frecuencia natural
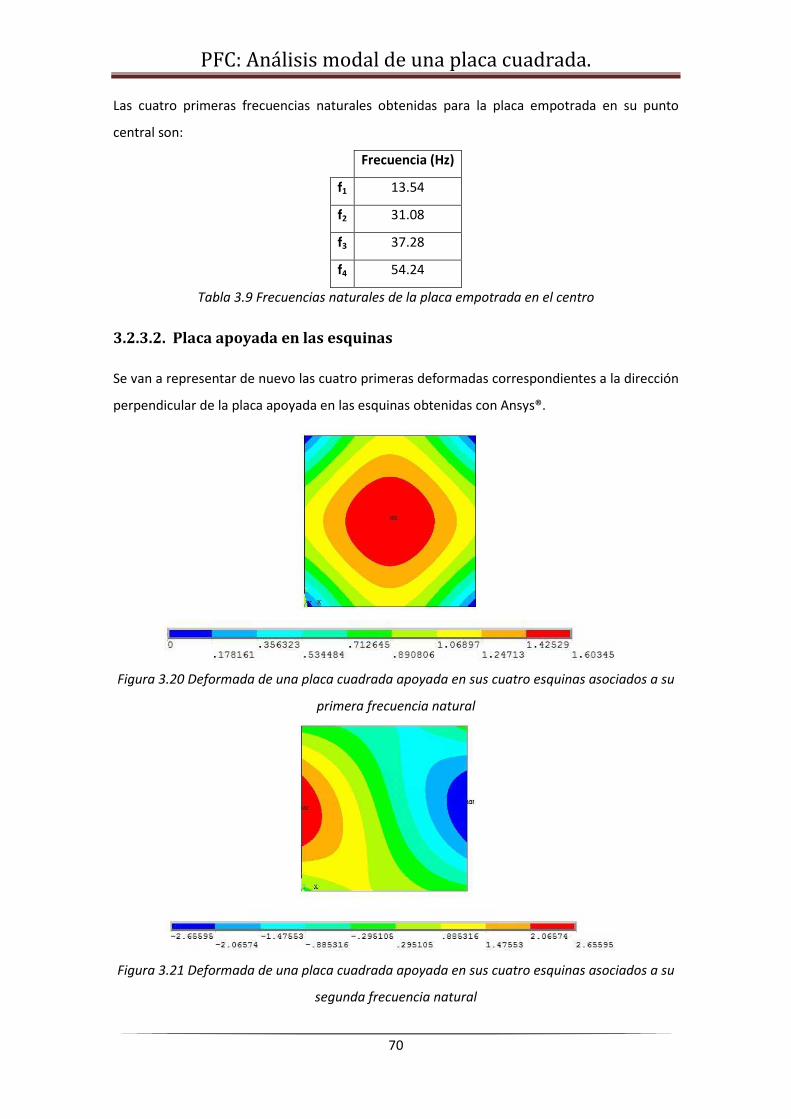
PFC: Análisis modal de una placa cuadrada.
70
Las cuatro primeras frecuencias naturales obtenidas para la placa empotrada en su punto
central son:
Frecuencia (Hz)
f1 13.54
f2 31.08
f3 37.28
f4 54.24
Tabla 3.9 Frecuencias naturales de la placa empotrada en el centro
3.2.3.2. Placa apoyada en las esquinas
Se van a representar de nuevo las cuatro primeras deformadas correspondientes a la dirección
perpendicular de la placa apoyada en las esquinas obtenidas con Ansys®.
Figura 3.20 Deformada de una placa cuadrada apoyada en sus cuatro esquinas asociados a su
primera frecuencia natural
Figura 3.21 Deformada de una placa cuadrada apoyada en sus cuatro esquinas asociados a su
segunda frecuencia natural

PFC: Análisis modal de una placa cuadrada.
71
Figura 3.22 Deformada de una placa cuadrada apoyada en sus cuatro esquinas asociados a su
tercera frecuencia natural
Figura 3.23 Deformada de una placa cuadrada apoyada en sus cuatro esquinas asociados a su
cuarta frecuencia natural
Por otro lado, al igual que se realizó en el apartado anterior, se van a presentar las cuatro
primeras frecuencias naturales de la placa apoyada en las esquinas.
Frecuencia (Hz)
f1 19.68
f2 43.65
f3 54.24
f4 106.38
Tabla 3.10 Frecuencias naturales de la placa apoyada en sus esquinas
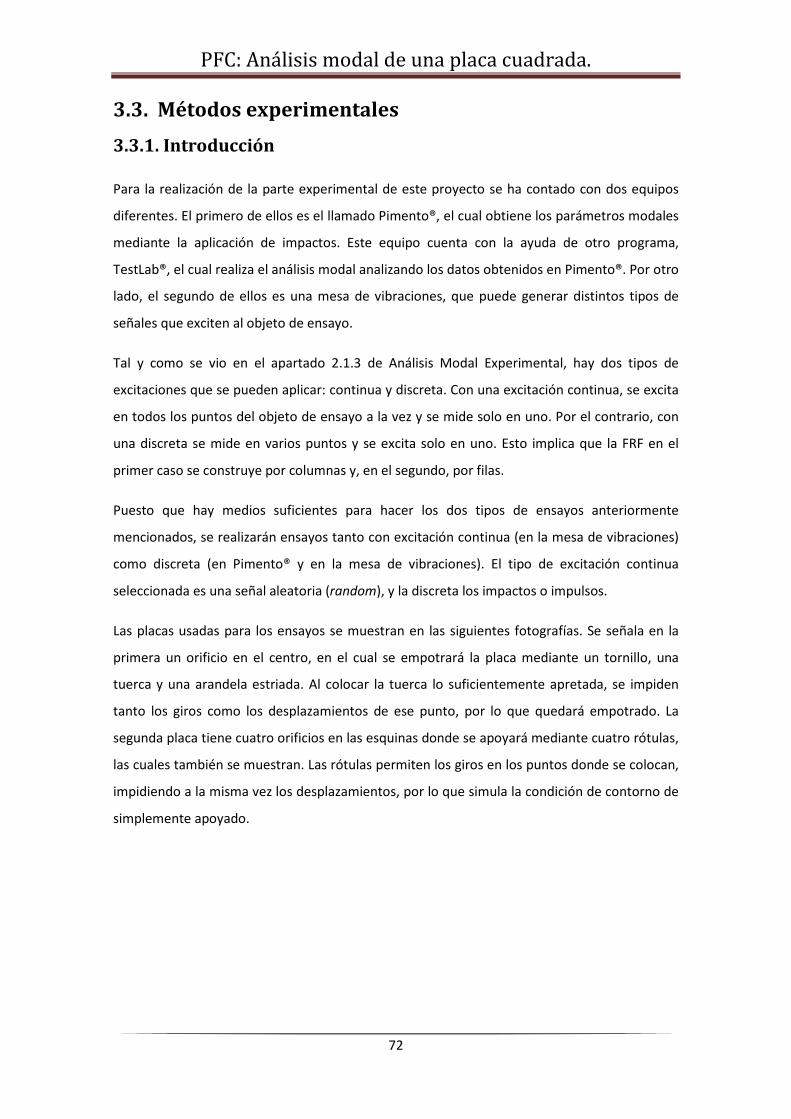
PFC: Análisis modal de una placa cuadrada.
72
3.3. Métodos experimentales
3.3.1. Introducción
Para la realización de la parte experimental de este proyecto se ha contado con dos equipos
diferentes. El primero de ellos es el llamado Pimento®, el cual obtiene los parámetros modales
mediante la aplicación de impactos. Este equipo cuenta con la ayuda de otro programa,
TestLab®, el cual realiza el análisis modal analizando los datos obtenidos en Pimento®. Por otro
lado, el segundo de ellos es una mesa de vibraciones, que puede generar distintos tipos de
señales que exciten al objeto de ensayo.
Tal y como se vio en el apartado 2.1.3 de Análisis Modal Experimental, hay dos tipos de
excitaciones que se pueden aplicar: continua y discreta. Con una excitación continua, se excita
en todos los puntos del objeto de ensayo a la vez y se mide solo en uno. Por el contrario, con
una discreta se mide en varios puntos y se excita solo en uno. Esto implica que la FRF en el
primer caso se construye por columnas y, en el segundo, por filas.
Puesto que hay medios suficientes para hacer los dos tipos de ensayos anteriormente
mencionados, se realizarán ensayos tanto con excitación continua (en la mesa de vibraciones)
como discreta (en Pimento® y en la mesa de vibraciones). El tipo de excitación continua
seleccionada es una señal aleatoria (random), y la discreta los impactos o impulsos.
Las placas usadas para los ensayos se muestran en las siguientes fotografías. Se señala en la
primera un orificio en el centro, en el cual se empotrará la placa mediante un tornillo, una
tuerca y una arandela estriada. Al colocar la tuerca lo suficientemente apretada, se impiden
tanto los giros como los desplazamientos de ese punto, por lo que quedará empotrado. La
segunda placa tiene cuatro orificios en las esquinas donde se apoyará mediante cuatro rótulas,
las cuales también se muestran. Las rótulas permiten los giros en los puntos donde se colocan,
impidiendo a la misma vez los desplazamientos, por lo que simula la condición de contorno de
simplemente apoyado.

PFC: Análisis modal de una placa cuadrada.
73
Figura 3.24 Placas de acero y rótula usadas en la parte experimental
Con respecto a la posición de los acelerómetros sobre la placa cabe mencionar que no debe
ser arbitraria. Un punto de medida no debe coincidir con un nodo de las frecuencias naturales
y, por tanto, los modos de vibración que se desean medir, como ya se explicó anteriormente.
La posición de los acelerómetros dependerá tanto de la condición de contorno como del
ensayo a realizar. Los puntos de colocación se detallarán más adelante.
3.3.2. Ensayo con Pimento® y TestLab®
Pimento® es un programa de adquisición de datos para el análisis modal experimental, que
registra datos en el dominio del tiempo y los transforma al dominio de la frecuencia a través
de la transformada rápida de Fourier (FFT).
Los datos a registrar son adquiridos por este software mediante la aplicación de impactos al
objeto de estudio. Es por esto que se necesita de un sistema de excitación para poder llevar a
cabo los golpes. Este sistema no es más que un martillo instrumentado o impact hammer. En
este proyecto se ha usado el martillo mostrado en la siguiente fotografía. La principal
característica del mismo es su sensibilidad, que es 2.25mV/N.
Figura 3.25 Martillo instrumentado con sus puntas e impactando sobre la placa
PFC: Análisis modal de una placa cuadrada.
74
El martillo instrumentado cuenta con un sensor piezoeléctrico colocado en su punta que mide
la fuerza que se aplica en cada impacto. A su vez, dispone de cuatro cabezales con los que se
consigue diferentes tipos de golpes [35]. Uno de ellos (metálico) es una punta dura y consigue
un impacto más puro, excitando al objeto en un amplio rango de frecuencias. Sin embargo, se
aumenta el riesgo de que se produzcan rebotes en el ensayo, lo cual invalida el resultado ya
que no se construye la FRF adecuadamente. Otras dos puntas (roja y negra) son blandas. Se
usan cuando el objeto de estudio es poco rígido y el riesgo de rebote al impactar alto. Con este
tipo de cabezales no hay rebotes, aunque el impulso es menos puro que en las puntas duras,
por lo que la calidad de la FRF es menor y se excitan menos frecuencias. Entre las puntas duras
y las blandas están las de dureza media (blanca), que son de vinilo y llegan a un equilibrio entre
la calidad de la FRF, el rango de frecuencias a excitar y el hecho de evitar los rebotes.
Por otra parte, para medir la respuesta del sistema se necesita de un sensor que mida las
aceleraciones, y este es un acelerómetro piezoeléctrico. Este tipo de acelerómetros son los
más usados en las medidas de vibraciones debido a una serie de propiedades [36]:
− Tienen un amplio rango de frecuencias, normalmente entre 2Hz y 15000Hz.
− Son muy compactos, sin partes móviles, ligeros y de tamaño reducido.
− Se montan fácilmente con adhesivos o atornillados. También pueden disponer de
bases magnéticas para montajes temporales o aplicaciones especiales.
Para la adquisición de datos también es necesario un módulo periférico que conecte el martillo
y los acelerómetros. En el momento de realización de los ensayos este módulo solo contaba
con dos canales disponibles, por lo que sólo ha podido usarse un acelerómetro en los ensayos.
Figura 3.26 Equipo de adquisición de datos y acelerómetros usados
Para poner en marcha Pimento® se abre el programa y se selecciona la opción Impact. Antes
de empezar, hay que programar el ensayo. Para ello, se seleccionan los canales que se van a

PFC: Análisis modal de una placa cuadrada.
75
usar y se define la banda de frecuencia. Para esto último se debe tener en cuenta el criterio de
Nyquist con el objetivo de evitar el aliasing, fenómeno que causa que señales continuas
distintas se tornen indistinguibles cuando se muestrean digitalmente [37]. El criterio de
Nyquist dice que la frecuencia de muestreo debe ser de al menos el doble del valor de la
frecuencia de interés. Puesto que el estudio de las frecuencias naturales se ha limitado hasta a
las cuatro primeras frecuencias naturales, la banda de frecuencia seleccionada ha sido 250Hz.
Figura 3.27 Interfaz del programa Pimento®
El siguiente paso es definir los canales seleccionados, especificando el nombre del canal, el
punto y la dirección en que se mide (si el canal corresponde al acelerómetro) o se excita (si el
canal corresponde al martillo), las unidades con las que se guardarán los datos y la sensibilidad
de los elementos. Estos datos son los siguientes:
Nombre Dirección Unidades
Acelerómetro +Z m/s2
Martillo -Z N
Tabla 3.11 Descripción de canales de Pimento®
También es necesario definir el parámetro trigger. El trigger establece una condición que, al
ser cumplida, ejecuta un cierto procedimiento. Para los ensayos realizados se ha seleccionado
la opción level trigger, que significa que para que se ponga en marcha el procedimiento, un
determinado parámetro alcance un valor establecido por el usuario. En este caso, la condición
será que la señal que proviene del martillo sea mayor que 1N.

PFC: Análisis modal de una placa cuadrada.
76
Por otra parte, el modo de excitación debe ser roving hammer, lo que significa que se excita en
varios puntos y se mide solo en uno. Es conveniente realizar más de una medida en el mismo
punto, para que el programa realice un promedio de todas ellas y así evitar posibles medidas
erróneas. En los ensayos realizados se han tomado cinco medias en cada punto.
También hay que tener en cuenta que en las resonancias los principales errores provienen de
los outputs o salidas. Puesto que la excitación del martillo es la salida, para estimar la FRF es
conveniente usar una función que solo considere los errores de los outputs y que suponga que
los inputs no tienen error.
Un aspecto muy importante a tener en cuenta es el uso de una ventana para evitar el leakage,
tal y como se explicó en el apartado de Análisis Modal Experimental. El leakage es uno de los
errores más graves que se pueden dar; provoca la tergiversación de componentes que no sean
múltiplos enteros de la frecuencia fundamental[38].El leakage también puede causar una
disminución de la amplitud representada con respecto a la real [39].Para el caso que aplica, se
ha elegido una ventana exponencial al 15%.Este tipo de ventanas es la más usada en ensayos
mediante impactos. La ventana exponencial permite realizar la medición de forma más exacta,
usándose cuando la vibración de una estructura no atenúa adecuadamente durante el
intervalo de muestreo.
Ya solo queda colocar el acelerómetro, impactar en los puntos establecidos y guardar los
datos. Es importante asegurarse que no existen rebotes en los golpes para que los resultados
sean válidos. Un impulso puro en el dominio del tiempo excita un rango infinito de frecuencias.
Por tanto, cuanto más limpio sea el impacto, más frecuencias se excitarán y más válidos serán
los resultados. Por lo que, en la medida de lo posible, hay que intentar que no haya rebotes.
En la figura siguiente se muestra un ejemplo de un golpe sin rebote y otro con rebote.

PFC: Análisis modal de una placa cuadrada.
77
Figura 3.28 Golpes sin rebote y con rebote en Pimento®
En este punto se acaba el trabajo a realizar con Pimento® y es necesario empezar con
TestLab®. Al abrir el programa se debe seleccionar el proyecto con el que se quiera continuar,
o empezar uno nuevo. A continuación se deben importar los archivos que se crearon en
Pimento®, los cuales deben tener una extensión .xdf y contener las FRF obtenidas. Para ello se
debe seleccionar la primera pestaña que aparece en workbook del programa, llamada
navigator, y, dentro de esta, la opción data calculator.
Figura 3.29 Barra de herramientas de Testlab®
Estas FRF deben acondicionarse para tratarlas en este nuevo programa, es decir, hay que
obtener los desplazamientos a partir de las aceleraciones calculadas. Por tanto, se realiza una
doble integración de las mismas con el comando double integrate. El tipo de integración usada
es la de Simpson, que utilizada la regla de los tres puntos, por la cual la integración es correcta
para componentes de bajas frecuencias pero incrementa la sobreestimación para alta
frecuencia.
El siguiente paso es dibujar la geometría del objeto de estudio. Se deben introducir las
coordenadas de los nodos, y también las áreas definidas por estos. Por otra parte, hay que

PFC: Análisis modal de una placa cuadrada.
78
especificar las condiciones de contorno. Los diferentes nodos se han elegido según los puntos
donde se aplican las condiciones de contorno, los puntos donde se colocan los acelerómetros y
los puntos donde se aplican los impactos.
Las condiciones de contorno ya se definieron en el apartado 3.2 sobre análisis modal
numérico. Recordándolas, para la placa empotrada en su punto central se prohíben tanto
desplazamientos como giros en dicho punto; y para la placa apoyada en las esquinas se
prohíben únicamente los desplazamientos.
Una vez definidos y calculados los anteriores parámetros y propiedades se puede empezar el
análisis modal propiamente dicho. Tras seleccionar los datos deseados y el rango de
frecuencias de estudio en la pestaña time MDOF, el programa construye la FRF global. Sobre
esta función, en el llamado diagrama de estabilización, se pueden seleccionar los modos de
vibración, los cuales corresponden a picos pronunciados de la FRF. Los picos que se deben
seleccionar son los polos estables (letra s) del sistema. Este tipo de polos tendrán un
amortiguamiento mucho más pequeño que otro tipo de polos, como son el polo estable en
frecuencia (letra f)o el polo estable en amortiguamiento (letra d). En este punto ya se tienen
tanto las frecuencias naturales como los modos de vibración.
TestLab® da la opción de representar los modos de vibración, la deformada y la indeformada,
entre otros.
El último paso a realizar es la validación de los resultados, lo cual se realiza de diferentes
maneras. Una de ellas, la que se encuentra en la pestaña modal synthesis, consiste en
sintetizar la FRF, es decir, calcular la FRF a partir de los parámetros modales que se han
obtenido, y posteriormente comparar la FRF nueva con la original. Cuanto más parecidas sean,
mejor será la estimación de los parámetros modales que se ha realizado. La correlación, que se
puede medir con el parámetro modal phase collinearity (MPC), y el error, que se estima con el
parámetro mean phase deviation (MPD), entre ambas deben ser lo más cercano a 100% y a 0%
posible respectivamente.
La segunda forma, en la pestaña modal validation, es el cálculo del número auto MAC (modal
assurance criterion). El auto MAC es una correlación numérica entre los modos de vibración
[39]. Es el procedimiento más usado para correlacionar dos conjuntos de modos de vibración,
uno medido experimentalmente y otro calculado teóricamente. Dados dos conjuntos de
modos, uno de ellos formado por M modos experimentales y el otro por N modos teóricos, se

PFC: Análisis modal de una placa cuadrada.
79
puede representar en una matriz de dimensiones MxN los valores del auto MAC en la que se
ve claramente las relaciones entre los modos experimentales y los teóricos.
Generalmente se acepta como satisfactorio valores de la diagonal de la matriz auto MAC lo
más cercanos posible al 100%, y los elementos fuera de la diagonal lo más pequeños posible.
A continuación se van a representar los resultados obtenidos en este ensayo.
3.3.2.1. Placa empotrada en el centro
Para la realización de los ensayos se colocó la placa en el mismo lugar donde se realizaron los
ensayos con la mesa de vibraciones, para que las condiciones de contorno sean idénticas en
ambos casos.
Con respecto a la posición de los acelerómetros, para poder obtener buena calidad en los
modos de vibración, se decide colocarlos en doce posiciones diferentes. Debido a el hecho de
que a Pimento ® solo pueden conectarse siete acelerómetros por ensayo, se realizarán dos
ensayos, cambiando la posición de los acelerómetros e impactando en los mismos puntos.
Figura 3.30 Placa empotrada en el centro para experimentos con Pimento®
Debido a la gran flexibilidad de la placa, lo que dificulta la toma de datos con impactos limpios,
se dividió en una malla de 25 nodos .En cada nodo de la malla se impacta con el martillo,
obteniendo una respuesta en cada uno de ellos. Tanto la malla como los puntos de medida
(posición de los acelerómetros), en rojo, se muestran en la siguiente figura.

PFC: Análisis modal de una placa cuadrada.
80
Figura 3.31 Puntos de impacto de la placa empotrada en el centro
Para el cálculo de la FRF global, Testlab® calcula la suma de las FRF obtenidas a partir de los
dos ensayos realizados (cada uno de ellos con el acelerómetro colocado en una posición
distinta e impactando en los mismos puntos). De esta forma, la FRF global es similar a la que se
obtendría realizando un único ensayo con varios acelerómetros e impactando en distintos
puntos.
Para realizar el análisis modal, se selecciona como rango de frecuencia de 3Hz a 150Hz,
estudiándose así los primeros cuatro modos de vibración. Instrucciones del programa indican
que no es conveniente empezar por una frecuencia de 0Hz, ya que podrían producirse errores
matemáticos.
La FRF obtenida con Testlab® para la placa empotrada en el centro es la que se muestra a
continuación. Puede observarse como aparecen cuatro polos estables (letra s),
correspondiendo estos a las cuatro primeras frecuencias naturales que el sistema detecta. Se
muestran también las frecuencias naturales y su amortiguamiento correspondiente.
Figura 3.32 FRF Suma de la placa empotrada en el centro con Testlab®

PFC: Análisis modal de una placa cuadrada.
81
Tabla 3.12 Frecuencias naturales de la placa empotrada en el centro en Testlab®
Es conveniente conocer la calidad de los resultados obtenidos. Para ello, se procede a la
validación de los datos.
En la figura siguiente se representa la comparación entre las FRF obtenidas en los dos ensayos
(en verde) y las FRF construidas a partir de los parámetros modales que Testlab® calcula (en
rojo) para cada uno de los acelerómetros, como suma de la respuesta en cada punto de
medida. La comparación de ambas FRF se realiza tanto en magnitud como en fase. La
correlación entre ambas funciones está en torno al 90% y el error al 10%. Si la correlación
fuese del 100 y el error del 0%, ambas funciones se superpondrían, dibujándose como una
sola.
(a) Síntesis modal del acelerómetro 1 (b) Síntesis modal del acelerómetro 2
(c) Síntesis modal del acelerómetro 3 (d) Síntesis modal del acelerómetro 4
(e) Síntesis modal del acelerómetro 5 (f) Síntesis modal del acelerómetro 6

PFC: Análisis modal de una placa cuadrada.
82
(g) Síntesis modal del acelerómetro 7 (h) Síntesis modal del acelerómetro 8
(i) Síntesis modal del acelerómetro 9 (j) Síntesis modal del acelerómetro 10
(k) Síntesis modal del acelerómetro 11 (l) Síntesis modal del acelerómetro 12
Figura 3.33 Comparación entre las FRF obtenidas experimentalmente y las obtenidas por
Testlab® para la placa empotrada en el centro
También es conveniente realizar una validación modal experimental, para lo que se calculará el
número MAC. Como puede observarse en la figura siguiente, las componentes de la diagonal
son iguales a 100, como cabía esperar para unos buenos resultados. Igualmente, los valores de
fuera de la diagonal son muy cercanos a cero.
Figura 3.34 Auto MAC de la placa empotrada en el centro
Por último se representan los modos de vibración con un mapa de colores, donde se
representa la deformada en la dirección perpendicular a la placa, puesto que es la única que
los acelerómetros pueden captar.

PFC: Análisis modal de una placa cuadrada.
83
Figura 3.35 Primer modo de vibración de una placa cuadrada empotrada en el centro obtenido
con Testlab®
Figura 3.36 Segundo modo de vibración de una placa cuadrada empotrada en el centro
obtenido con Testlab®
Figura 3.37 Tercer modo de vibración de una placa cuadrada empotrada en el centro obtenido
con Testlab®

PFC: Análisis modal de una placa cuadrada.
84
Figura 3.38 Cuarto modo de vibración de una placa cuadrada empotrada en el centro obtenido
con Testlab®
3.3.2.2. Placa apoyada en sus esquinas
La placa apoyada en las esquinas se colocó en el mismo lugar que la anterior, como puede
verse en la fotografía siguiente.
Figura 3.39 Placa apoyada en las esquinas para experimentos con Pimento®
La malla elegida para la placa apoyada en las esquinas es mayor que en el caso de la
empotrada. Esto es posible debido a que la calidad de los golpes es mejor, ya que la placa es
menos flexible al tener limitados ciertos grados de libertad en las esquinas, . Por tanto, se
toma una malla de 81 puntos.
Con respecto a los acelerómetros (cuya posición se representa a continuación, mostrando cada
punto rojo un acelerómetro), se colocan 13, dividiéndose, al igual que en el caso anterior, en
dos ensayos, cambiando la posición de los acelerómetros e impactando en ambos en los 81
puntos de la malla.

PFC: Análisis modal de una placa cuadrada.
85
Figura 3.40 Puntos de impacto de la placa apoyada en las esquinas
Para realizar el análisis modal, se selecciona como rango de frecuencia de 3 Hz a 150Hz. La FRF
global obtenida en los ensayos y calculada de la misma forma que en el caso anterior es la que
se muestra a continuación.
Figura 3.41 FRF Suma de la placa apoyada en las esquinas con Testlab®
Tabla 3.13 Frecuencias naturales de la placa apoyada en las esquinas en Testlab®
En la figura siguiente se representa la comparación entre las FRF obtenidas en los dos ensayos
(en verde) y las FRF construidas a partir de los parámetros modales que Testlab® calculó (en
rojo) para cada uno de los acelerómetros. La correlación entre ambas funciones está en torno
a 90% y el error 10%, al igual que en la placa empotrada en el centro.

PFC: Análisis modal de una placa cuadrada.
86
(a) Síntesis modal del acelerómetro 1 (b) Síntesis modal del acelerómetro 2
(c) Síntesis modal del acelerómetro 3 (d) Síntesis modal del acelerómetro 4
(e) Síntesis modal del acelerómetro 5 (f) Síntesis modal del acelerómetro 6
(g) Síntesis modal del acelerómetro 7 (h) Síntesis modal del acelerómetro 8
(i) Síntesis modal del acelerómetro 9 (j) Síntesis modal del acelerómetro 10
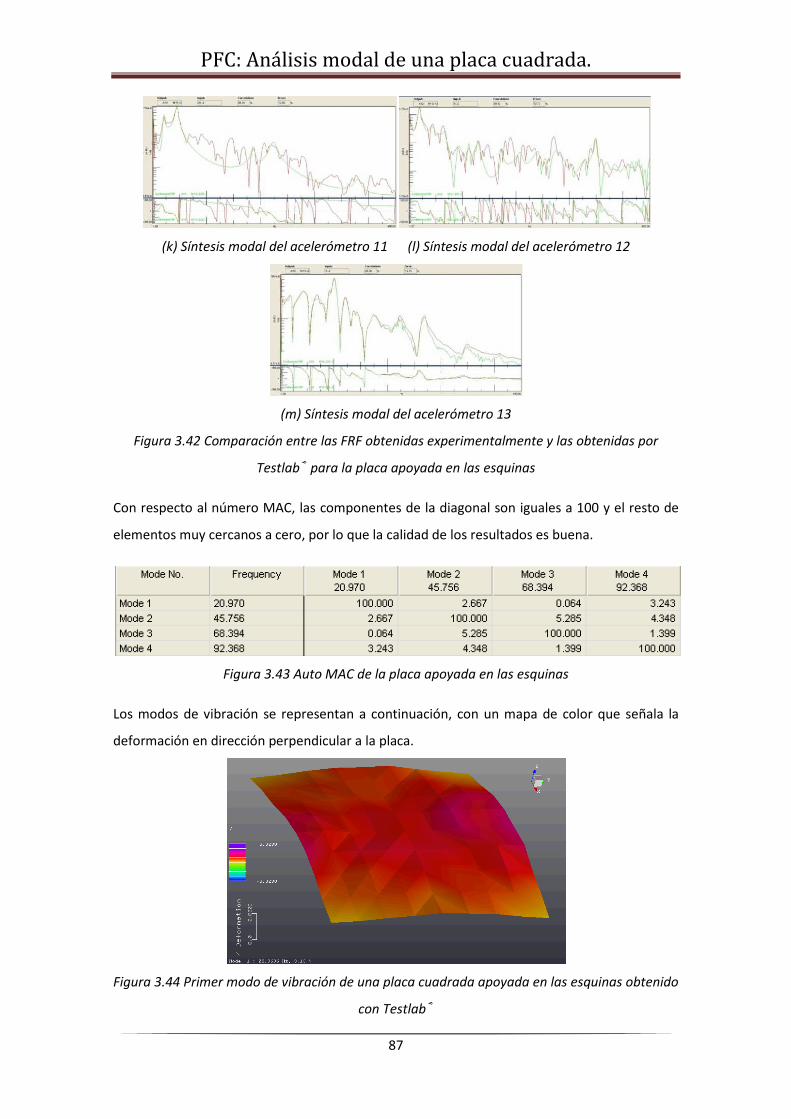
PFC: Análisis modal de una placa cuadrada.
87
(k) Síntesis modal del acelerómetro 11 (l) Síntesis modal del acelerómetro 12
(m) Síntesis modal del acelerómetro 13
Figura 3.42 Comparación entre las FRF obtenidas experimentalmente y las obtenidas por
Testlab® para la placa apoyada en las esquinas
Con respecto al número MAC, las componentes de la diagonal son iguales a 100 y el resto de
elementos muy cercanos a cero, por lo que la calidad de los resultados es buena.
Figura 3.43 Auto MAC de la placa apoyada en las esquinas
Los modos de vibración se representan a continuación, con un mapa de color que señala la
deformación en dirección perpendicular a la placa.
Figura 3.44 Primer modo de vibración de una placa cuadrada apoyada en las esquinas obtenido
con Testlab®

PFC: Análisis modal de una placa cuadrada.
88
0
Figura 3.45 Segundo modo de vibración de una placa cuadrada apoyada en las esquinas
obtenido con Testlab®
Figura 3.46 Tercer modo de vibración de una placa cuadrada apoyada en las esquinas obtenido
con Testlab®
Figura 3.47 Cuarto modo de vibración de una placa cuadrada apoyada en las esquinas
obtenido con Testlab®
PFC: Análisis modal de una placa cuadrada.
89
3.3.3. Ensayos con la mesa de vibraciones
La mesa de vibraciones es un equipo que genera distintos tipos de vibraciones, tanto continuas
(sinusoidales, señales tipo random, etc.) como discretas (impulsos). Gracias a esta
característica, se puede estudiar el comportamiento de objetos o estructuras ante distintos
tipos de estímulos externos. Estos estímulos pueden ser verticales u horizontales, ya que la
mesa cuenta con dos bases paralelas al suelo, las cuales se mueven una de ellas en vertical
(cilindro blanco) y otra en horizontal (placa metálica). En la siguiente fotografía puede verse la
mesa.
Figura 3.48 Mesa de vibraciones
Una limitación existente es el tamaño de los objetos a ensayar, que no pueden ser
excesivamente grandes ni pesados. Más concretamente, el peso máximo del componente a
ensayar en la mesa vertical es 460kg y en la mesa horizontal 312kg. Otra limitación es la
frecuencia límite que se puede estudiar, que no puede superar los 2500Hz, pues esta
frecuencia es próxima a la resonancia de la máquina.
La mesa de vibraciones cuenta con dos software que permiten analizar y programar los
ensayos deseados. Con estos, se pueden diseñar distintos tipos de test, cambiando el tipo y la
amplitud de excitación a aplicar, la frecuencia y el tiempo de aplicación, etc. La diferencia
entre ambos es que el primero de ellos, llamado Signal Star® Vector Vibration Control System,
solo genera la excitación y guarda los datos registrados pero no puede hacer ningún tipo de
análisis. Sin embargo, el segundo programa, llamado Signal Calc Mobilyzer®, además de
generar las vibraciones, de forma más limitada que el anterior, se pueden realizar análisis
modales con los que se obtienen las FRF, entre otros. No obstante, esta máquina no es la más
apropiada para este tipo de análisis pues, aunque se puede obtener las funciones de respuesta
en frecuencia, no ocurre lo mismo con los modos de vibración. Además, aunque en la FRF se
pueden ver las frecuencias naturales, no las lista para mayor comodidad.
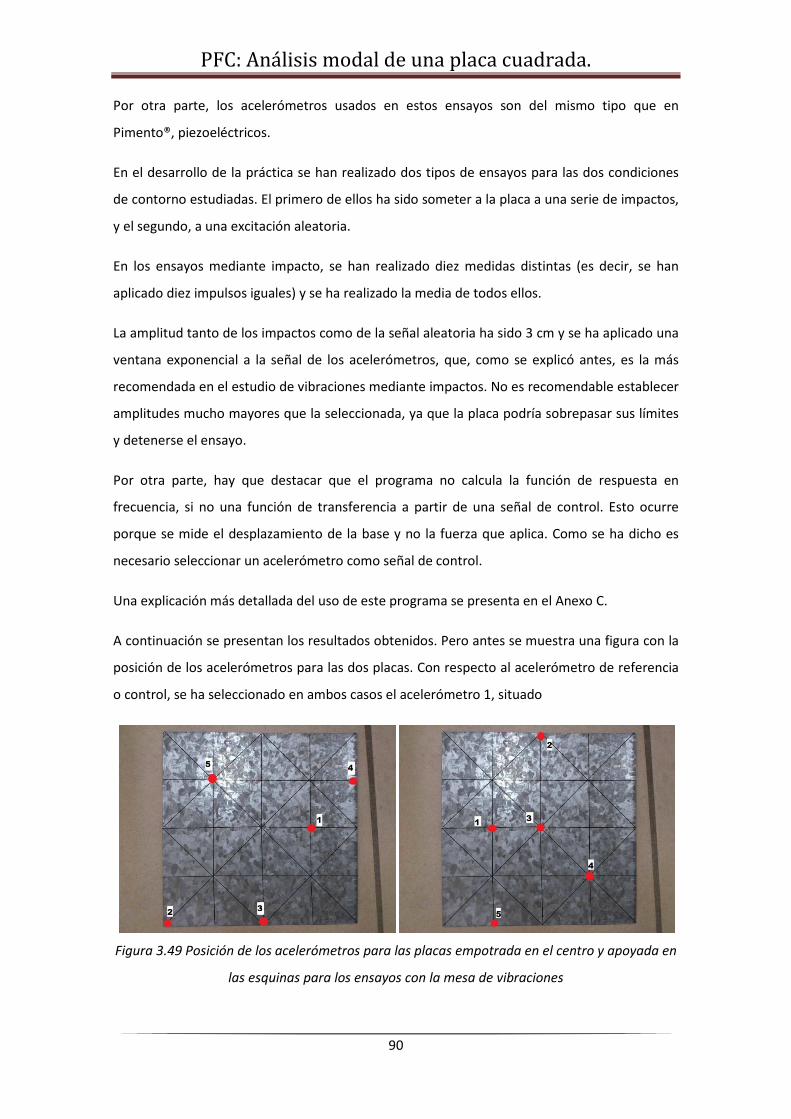
PFC: Análisis modal de una placa cuadrada.
90
Por otra parte, los acelerómetros usados en estos ensayos son del mismo tipo que en
Pimento®, piezoeléctricos.
En el desarrollo de la práctica se han realizado dos tipos de ensayos para las dos condiciones
de contorno estudiadas. El primero de ellos ha sido someter a la placa a una serie de impactos,
y el segundo, a una excitación aleatoria.
En los ensayos mediante impacto, se han realizado diez medidas distintas (es decir, se han
aplicado diez impulsos iguales) y se ha realizado la media de todos ellos.
La amplitud tanto de los impactos como de la señal aleatoria ha sido 3 cm y se ha aplicado una
ventana exponencial a la señal de los acelerómetros, que, como se explicó antes, es la más
recomendada en el estudio de vibraciones mediante impactos. No es recomendable establecer
amplitudes mucho mayores que la seleccionada, ya que la placa podría sobrepasar sus límites
y detenerse el ensayo.
Por otra parte, hay que destacar que el programa no calcula la función de respuesta en
frecuencia, si no una función de transferencia a partir de una señal de control. Esto ocurre
porque se mide el desplazamiento de la base y no la fuerza que aplica. Como se ha dicho es
necesario seleccionar un acelerómetro como señal de control.
Una explicación más detallada del uso de este programa se presenta en el Anexo C.
A continuación se presentan los resultados obtenidos. Pero antes se muestra una figura con la
posición de los acelerómetros para las dos placas. Con respecto al acelerómetro de referencia
o control, se ha seleccionado en ambos casos el acelerómetro 1, situado
Figura 3.49 Posición de los acelerómetros para las placas empotrada en el centro y apoyada en
las esquinas para los ensayos con la mesa de vibraciones

PFC: Análisis modal de una placa cuadrada.
91
3.3.3.1. Placa empotrada en el centro. Impacto
Al aplicar los impactos, las respuestas de los acelerómetros colocados en la placa es la
siguiente. Puede verse como la mayor amplitud aparece al inicio, en el momento de la
aplicación del impacto. Después de este, la señal va atenuando su amplitud.
(a) Acelerómetro 1
(b) Acelerómetro 2 (c) Acelerómetro 3
(d) Acelerómetro 4 (e) Acelerómetro 5
Figura 3.50 Respuesta temporal de los acelerómetros de la placa empotrada en el centro al ser
sometida a impactos
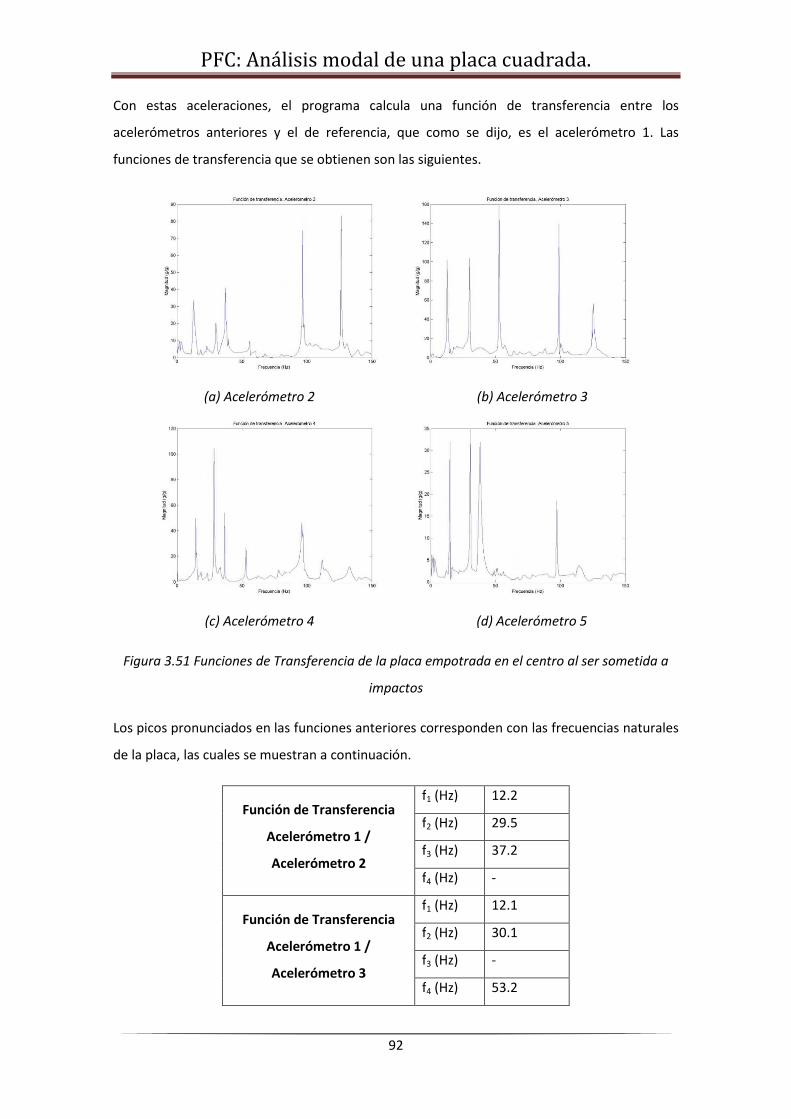
PFC: Análisis modal de una placa cuadrada.
92
Con estas aceleraciones, el programa calcula una función de transferencia entre los
acelerómetros anteriores y el de referencia, que como se dijo, es el acelerómetro 1. Las
funciones de transferencia que se obtienen son las siguientes.
(a) Acelerómetro 2 (b) Acelerómetro 3
(c) Acelerómetro 4 (d) Acelerómetro 5
Figura 3.51 Funciones de Transferencia de la placa empotrada en el centro al ser sometida a
impactos
Los picos pronunciados en las funciones anteriores corresponden con las frecuencias naturales
de la placa, las cuales se muestran a continuación.
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 2
f1 (Hz) 12.2
f2 (Hz) 29.5
f3 (Hz) 37.2
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 3
f1 (Hz) 12.1
f2 (Hz) 30.1
f3 (Hz) -
f4 (Hz) 53.2

PFC: Análisis modal de una placa cuadrada.
93
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 4
f1 (Hz) 14.1
f2 (Hz) 28.2
f3 (Hz) 36.5
f4 (Hz) 53.2
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 5
f1 (Hz) 14.8
f2 (Hz) 33.1
f3 (Hz) 37.6
f4 (Hz) -
Tabla 3.14 Frecuencias naturales de la placa empotrada en el centro sometida a impactos en la
mesa de vibraciones
3.3.3.2. Placa empotrada en el centro. Señal aleatoria (random)
Al aplicar la respuesta aleatoria, las respuestas de los acelerómetros colocados en la
placa es la siguiente.
(a) Acelerómetro 1
(b) Acelerómetro 2 (c) Acelerómetro 3

PFC: Análisis modal de una placa cuadrada.
94
(d) Acelerómetro 4 (e) Acelerómetro 5
Figura 3.52 Respuesta temporal de los acelerómetros de la placa empotrada en el centro al ser
sometida a una señal aleatoria
Con estas aceleraciones, el programa calcula una función de transferencia, que son las
siguientes.
(a) Acelerómetro 2 (b) Acelerómetro 3
(c) Acelerómetro 4 (d) Acelerómetro 5
Figura 3.53 Funciones de transferencia de la placa empotrada en el centro al ser sometida a
una señal aleatoria
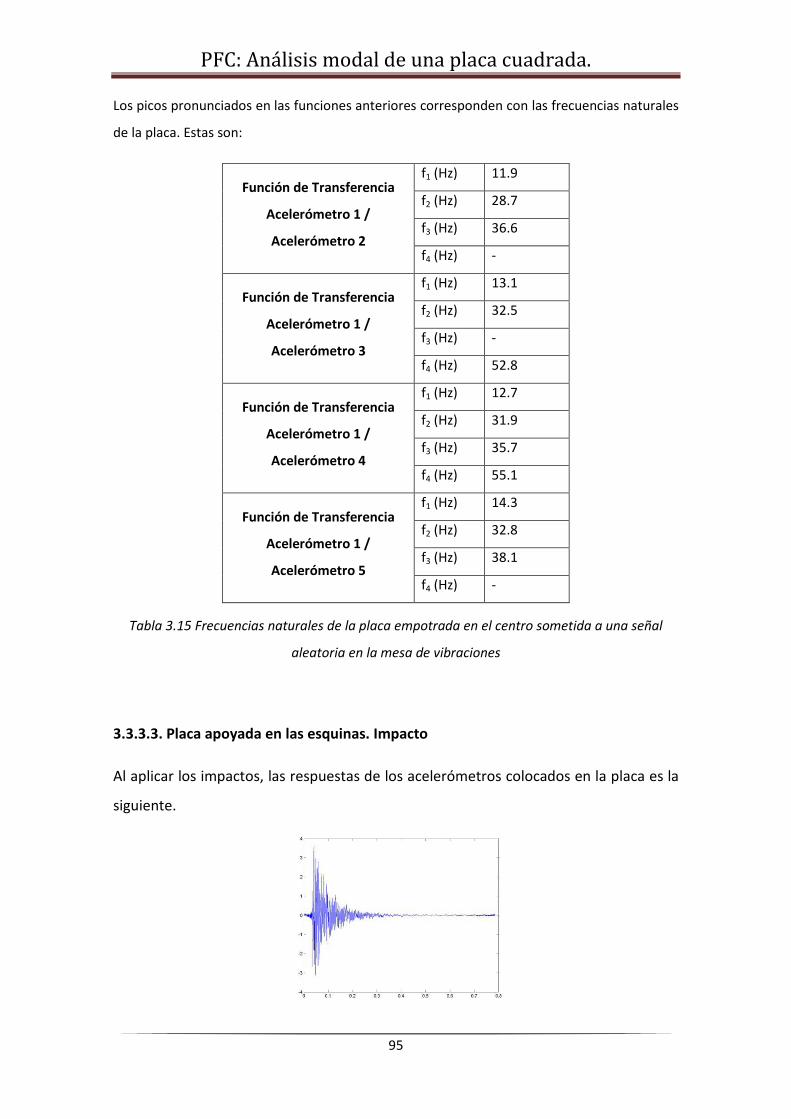
PFC: Análisis modal de una placa cuadrada.
95
Los picos pronunciados en las funciones anteriores corresponden con las frecuencias naturales
de la placa. Estas son:
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 2
f1 (Hz) 11.9
f2 (Hz) 28.7
f3 (Hz) 36.6
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 3
f1 (Hz) 13.1
f2 (Hz) 32.5
f3 (Hz) -
f4 (Hz) 52.8
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 4
f1 (Hz) 12.7
f2 (Hz) 31.9
f3 (Hz) 35.7
f4 (Hz) 55.1
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 5
f1 (Hz) 14.3
f2 (Hz) 32.8
f3 (Hz) 38.1
f4 (Hz) -
Tabla 3.15 Frecuencias naturales de la placa empotrada en el centro sometida a una señal
aleatoria en la mesa de vibraciones
3.3.3.3. Placa apoyada en las esquinas. Impacto
Al aplicar los impactos, las respuestas de los acelerómetros colocados en la placa es la
siguiente.

PFC: Análisis modal de una placa cuadrada.
96
(a) Acelerómetro 1
(b) Acelerómetro 2 (c) Acelerómetro 3
(d) Acelerómetro 4 (e) Acelerómetro 5
Figura 3.54 Respuesta temporal de los acelerómetros de la placa apoyada en las esquinas al ser
sometida a impactos
Con estas aceleraciones, el programa calcula las funciones de transferencia.
(a) Acelerómetro 2 (b) Acelerómetro 3

PFC: Análisis modal de una placa cuadrada.
97
(c) Acelerómetro 4 (d) Acelerómetro 5
Figura 3.55 Funciones de transferencia de la placa apoyada en las esquinas al ser sometida a
impactos
Los picos pronunciados en las funciones anteriores corresponden con las frecuencias naturales
de la placa. Estas son:
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 2
f1 (Hz) 18.5
f2 (Hz) 41.9
f3 (Hz) 51.2
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 3
f1 (Hz) 17.0
f2 (Hz) -
f3 (Hz) -
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 4
f1 (Hz) 17.6
f2 (Hz) 38.3
f3 (Hz) -
f4 (Hz) 103.8
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 5
f1 (Hz) 20.5
f2 (Hz) 41.7
f3 (Hz) 56.4
f4 (Hz) 106.4
Tabla 3.16 Frecuencias naturales de la placa apoyada en las esquinas sometida a impactos en
la mesa de vibraciones
3.3.3.4. Placa apoyada en las esquinas. Señal aleatoria (random)

PFC: Análisis modal de una placa cuadrada.
98
Al aplicar la señal aleatoria, las respuestas de los acelerómetros colocados en la placa
es la siguiente.
(a) Acelerómetro 1
(b) Acelerómetro 2 (c) Acelerómetro 3
(d) Acelerómetro 4 (e) Acelerómetro 5
Figura 3.56 Respuesta temporal de los acelerómetros de la placa apoyada en las esquinas al ser
sometida a una señal aleatoria
Con estas aceleraciones, el programa construye las funciones de respuesta en frecuencia.

PFC: Análisis modal de una placa cuadrada.
99
(a) Acelerómetro 2 (b) Acelerómetro 3
(c) Acelerómetro 4 (d) Acelerómetro 5
Figura 3.57 Funciones de transferencia de la placa apoyada en las esquinas al ser sometida a
una señal aleatoria
Los picos pronunciados en las funciones anteriores corresponden con las frecuencias naturales
de la placa. Estas son:
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 2
f1 (Hz) 20.5
f2 (Hz) 43.6
f3 (Hz) 56.4
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 3
f1 (Hz) 18.6
f2 (Hz) -
f3 (Hz) -
f4 (Hz) -
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 4
f1 (Hz) 17.9
f2 (Hz) 42.3
f3 (Hz) -
f4 (Hz) 107.0

PFC: Análisis modal de una placa cuadrada.
100
Función de Transferencia
Acelerómetro 1 /
Acelerómetro 5
f1 (Hz) 18.6
f2 (Hz) 41.0
f3 (Hz) 58.3
f4 (Hz) 104.5
Tabla 3.17 Frecuencias naturales de la placa apoyada en las esquinas sometida a una señal
aleatoria en la mesa de vibraciones
4. DISCUSIONES Y CONCLUSIONES
4.1. Comparación de resultados
Con el objetivo de obtener conclusiones de forma clara y sencilla, se van a comparar los
diferentes métodos usados y se van a calcular los errores entre unos y otros.
El método de referencia seleccionado para comparar todos los demás ha sido el numérico,
desarrollado con el programa Ansys®.
La fórmula usada para el cálculo del error es
ÅG = H�� − �Í�Í
H ∙ 100
siendo ÅG el error relativo, �� el valor del cual se desea conocer el valor y �Í el valor
verdadero. Se ha tomado como valor verdadero los obtenidos en Ansys®.
Para validar los resultados de Ansys®, se ha comprobado que el peso de los acelerómetros
usados en los experimentos no afecta ni a los modos ni a las frecuencias naturales. Para ello,
se han realizado diversos análisis, aplicando ciertas cargas puntuales en los puntos donde se
colocan los acelerómetros, con un valor igual a su peso y en dirección -z. Los resultados han
demostrado que las frecuencias son exactamente las mismas en todos los casos.
También se ha realizado un análisis de convergencia, disminuyendo el tamaño de los
elementos y comprobando que los resultados no cambian.
4.1.1 Comparación entre métodos semi-analítico y numérico
4.1.1.1. Placa empotrada en el centro

PFC: Análisis modal de una placa cuadrada.
101
Se presenta a continuación una comparación entre los resultados obtenidos con la formulación
acústica (simulados con Matlab®) y los obtenidos con Ansys®. Se recuerda que el primer modo
de la empotrada no se puede detectar con este método.
En la siguiente tabla se muestran las frecuencias obtenidas teóricamente y numéricamente de
la placa empotrada en el centro. También aparece el error entre ambas. Como se puede
observar, los errores obtenidos son pequeños, siendo la media de todos ellos de 5.99%.
Nº Frecuencia Frecuencia (Hz) semi-analítica
Frecuencia (Hz) numérica
Error (%)
1 - 13.54 -
2 27.31 31.08 12.13
3 34.15 32.28 5.79
4 54.63 54.24 0.07
Tabla 4.1 Frecuencias naturales con métodos semi-analítico y numérico de la placa empotrada
en el centro
Por otro lado, a continuación se realiza una comparación de los modos. Las figuras (a) son los
obtenidos con los métodos semi-analíticos y las (b) con Ansys®. En el tercer y cuarto modo
coinciden perfectamente las líneas modales. No ocurre lo mismo en el segundo modo, ya que
el método acústico parece representar una línea modal, cuando se ve en (b) que no existe. Sin
embargo, sí coinciden a la perfección los puntos de máximos y mínimos desplazamientos.
(a) (b)
Figura 4.1 Comparación entre los métodos semi-teórico y numérico del modo 2 de una placa
cuadrada empotrada en el centro

PFC: Análisis modal de una placa cuadrada.
102
(a) (b)
Figura 4.2 Comparación entre los métodos semi-teórico y numérico del modo 3 de una placa
cuadrada empotrada en el centro
(a) (b)
Figura 4.3 Comparación entre los métodos semi-teórico y numérico del modo 4 de una placa
cuadrada empotrada en el centro
4.1.1.2. Placa apoyada en las esquinas
En la siguiente tabla se muestra la comparativa entre las frecuencias obtenidas con los
métodos de Cox y Boxer (tabla 4.2) y Nishimura (tabla 4.3) y las obtenidas con Ansys®.
Nº Frecuencia Frecuencia (Hz) semi-analítica
Frecuencia (Hz) numérica
Error (%)
1 19.70 19.68 0.10
2 43.54 43.65 0.25
3 52.95 54.24 2.38
4 106.33 106.38 0.05
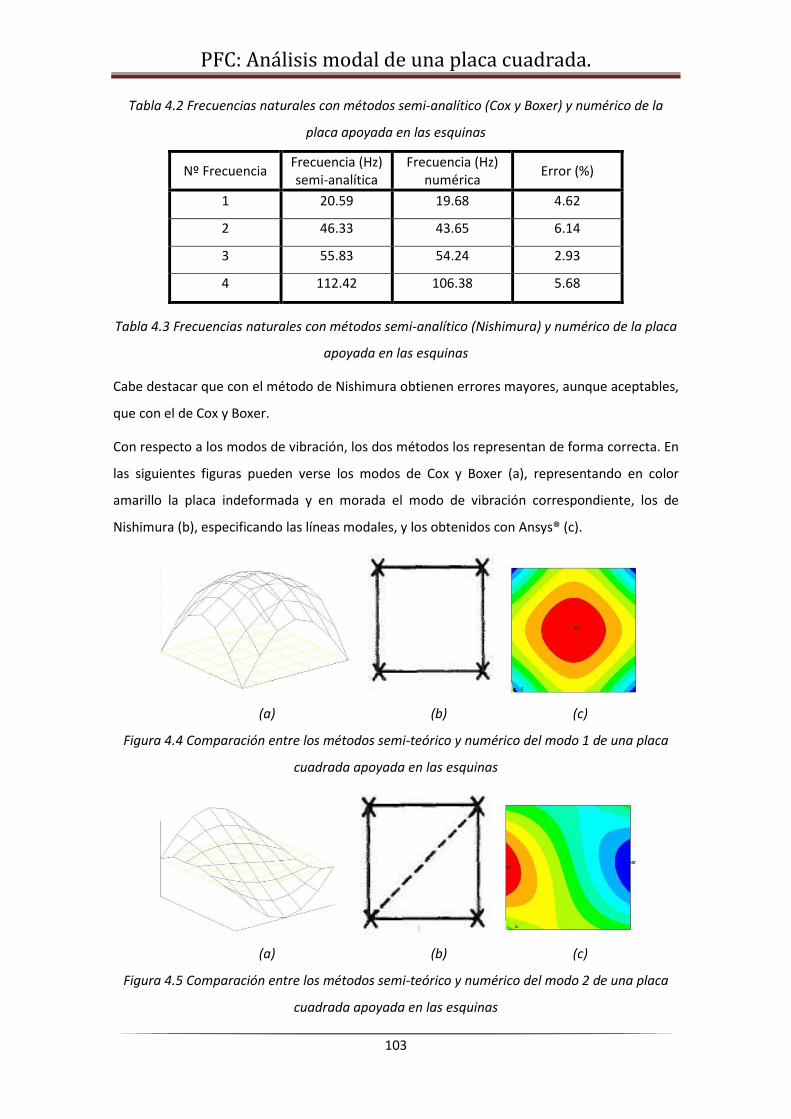
PFC: Análisis modal de una placa cuadrada.
103
Tabla 4.2 Frecuencias naturales con métodos semi-analítico (Cox y Boxer) y numérico de la
placa apoyada en las esquinas
Nº Frecuencia Frecuencia (Hz) semi-analítica
Frecuencia (Hz) numérica
Error (%)
1 20.59 19.68 4.62
2 46.33 43.65 6.14
3 55.83 54.24 2.93
4 112.42 106.38 5.68
Tabla 4.3 Frecuencias naturales con métodos semi-analítico (Nishimura) y numérico de la placa
apoyada en las esquinas
Cabe destacar que con el método de Nishimura obtienen errores mayores, aunque aceptables,
que con el de Cox y Boxer.
Con respecto a los modos de vibración, los dos métodos los representan de forma correcta. En
las siguientes figuras pueden verse los modos de Cox y Boxer (a), representando en color
amarillo la placa indeformada y en morada el modo de vibración correspondiente, los de
Nishimura (b), especificando las líneas modales, y los obtenidos con Ansys® (c).
(a) (b) (c)
Figura 4.4 Comparación entre los métodos semi-teórico y numérico del modo 1 de una placa
cuadrada apoyada en las esquinas
(a) (b) (c)
Figura 4.5 Comparación entre los métodos semi-teórico y numérico del modo 2 de una placa
cuadrada apoyada en las esquinas

PFC: Análisis modal de una placa cuadrada.
104
(a) (b) (c)
Figura 4.6 Comparación entre los métodos semi-teórico y numérico del modo 3 de una placa
cuadrada apoyada en las esquinas
(a) (b) (c)
Figura 4.7 Comparación entre los métodos semi-teórico y numérico del modo 4 de una placa
cuadrada apoyada en las esquinas
4.1.2. Comparación entre métodos experimental (Pimento® y
Testlab®) y numérico
4.1.2.1. Placa empotrada en el centro
En la siguiente tabla se calcula el error entre las frecuencias obtenidas con los programas
Pimento® y Testlab® y los de Ansys®. El error medio de estos cuatro valores es de 8.71%, el
cual se puede considerar como aceptable para un ensayo experimental.
Nº Frecuencia Frecuencia (Hz)
Con Testlab® Frecuencia (Hz)
con Ansys® Error (%)
1 15.730 13.541 16.21
2 28.723 31.076 7.42
3 37.619 37.278 1.07
4 59.695 54.239 10.14
Tabla 4.4 Frecuencias naturales con métodos experimentales (Pimento® y Testlab®) y numérico
de la placa empotrada en el centro
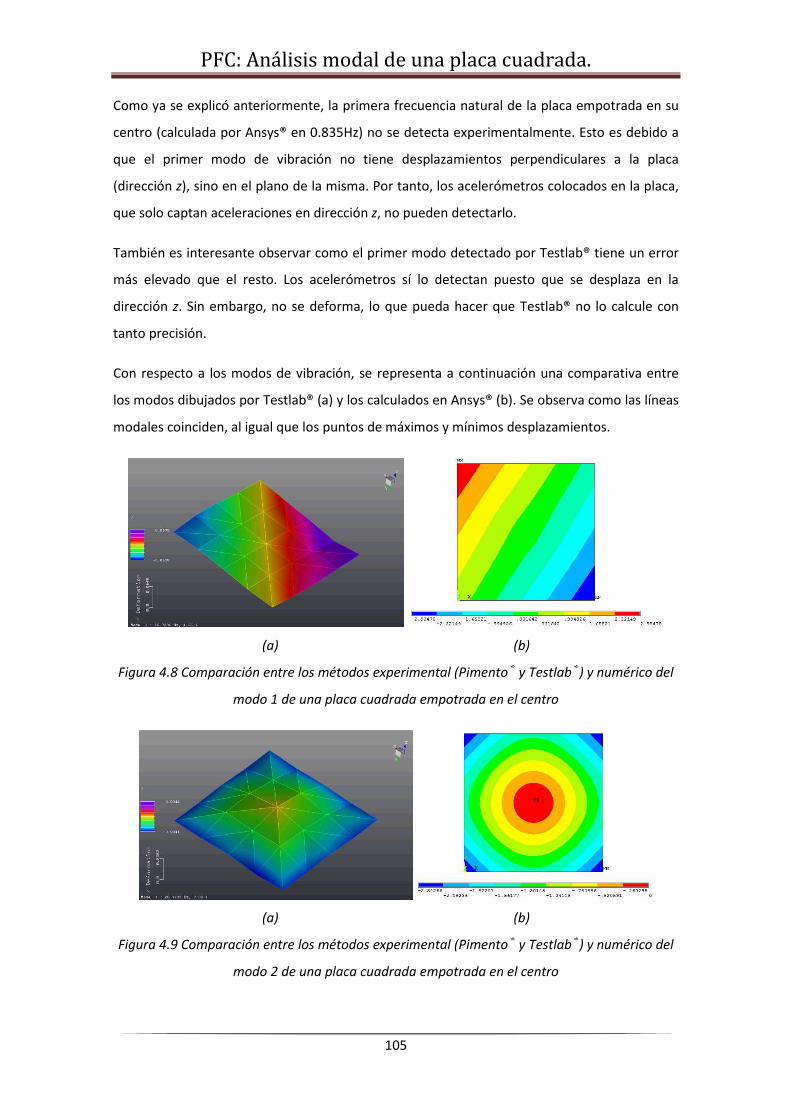
PFC: Análisis modal de una placa cuadrada.
105
Como ya se explicó anteriormente, la primera frecuencia natural de la placa empotrada en su
centro (calculada por Ansys® en 0.835Hz) no se detecta experimentalmente. Esto es debido a
que el primer modo de vibración no tiene desplazamientos perpendiculares a la placa
(dirección z), sino en el plano de la misma. Por tanto, los acelerómetros colocados en la placa,
que solo captan aceleraciones en dirección z, no pueden detectarlo.
También es interesante observar como el primer modo detectado por Testlab® tiene un error
más elevado que el resto. Los acelerómetros sí lo detectan puesto que se desplaza en la
dirección z. Sin embargo, no se deforma, lo que pueda hacer que Testlab® no lo calcule con
tanto precisión.
Con respecto a los modos de vibración, se representa a continuación una comparativa entre
los modos dibujados por Testlab® (a) y los calculados en Ansys® (b). Se observa como las líneas
modales coinciden, al igual que los puntos de máximos y mínimos desplazamientos.
(a) (b)
Figura 4.8 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 1 de una placa cuadrada empotrada en el centro
(a) (b)
Figura 4.9 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 2 de una placa cuadrada empotrada en el centro

PFC: Análisis modal de una placa cuadrada.
106
(a) (b)
Figura 4.10 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 3 de una placa cuadrada empotrada en el centro
(a) (b)
Figura 4.11 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 4 de una placa cuadrada empotrada en el centro
4.1.2.2. Placa apoyada en las esquinas
Al calcular el error entre las frecuencias obtenidas en Pimento® y Testlab® y las obtenidas con
Ansys® para una placa apoyada en las esquinas, se observa que sus valores son bajos, siendo el
error medio de 9.2%.
Nº Frecuencia Frecuencia (Hz)
Con Testlab® Frecuencia (Hz)
Con Ansys® Error (%)
1 20.770 19.68 5.54
2 45.756 43.65 4.82
3 61.394 54.24 13.19
4 92.368 106.38 13.20
Tabla 4.5 Frecuencias naturales con métodos experimentales (Pimento® y Testlab®) y numérico
de la placa apoyada en las esquinas
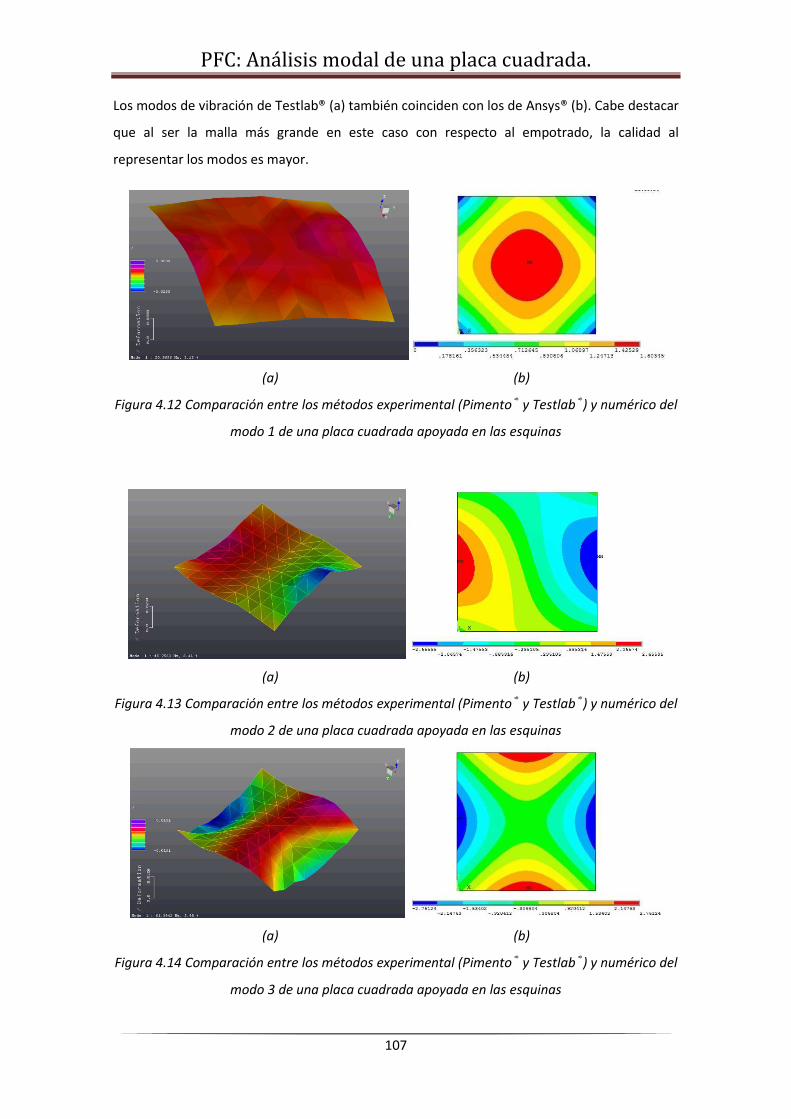
PFC: Análisis modal de una placa cuadrada.
107
Los modos de vibración de Testlab® (a) también coinciden con los de Ansys® (b). Cabe destacar
que al ser la malla más grande en este caso con respecto al empotrado, la calidad al
representar los modos es mayor.
(a) (b)
Figura 4.12 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 1 de una placa cuadrada apoyada en las esquinas
(a) (b)
Figura 4.13 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 2 de una placa cuadrada apoyada en las esquinas
(a) (b)
Figura 4.14 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 3 de una placa cuadrada apoyada en las esquinas

PFC: Análisis modal de una placa cuadrada.
108
(a) (b)
Figura 4.15 Comparación entre los métodos experimental (Pimento® y Testlab®) y numérico del
modo 4 de una placa cuadrada apoyada en las esquinas
4.1.3. Comparación entre métodos experimental (mesa de
vibraciones) y numérico
4.1.3.1. Placa empotrada en el centro
En el caso de la mesa de vibraciones, se realizaron dos ensayos, uno con una excitación
aleatoria y otra mediante impactos. Este método experimental no permite dibujar los modos
de vibración, por lo que solo se podrán comparar las frecuencias naturales.
Los errores que se calculan entre ambas frecuencias para los dos tipos de excitación están en
torno al 3.94% para el caso de impactos y el 3.57% para el caso de la señal aleatoria, ambos
muy parecidos.
Nº Frecuencia
Frecuencia (Hz) con mesa
Frecuencia (Hz) numérica
Error (%)
Acelerómetro 1
/
Acelerómetro 2
1 12.2 13.54 9.90
2 29.5 31.08 5.08
3 37.2 37.28 0.22
4 - 54.24 -
Acelerómetro 1
/
Acelerómetro 3
1 12.1 13.54 10.63
2 30.1 31.08 3.15
3 - 37.28 -
4 53.2 54.24 1.01
Acelerómetro 1 1 14.1 13.54 4.14
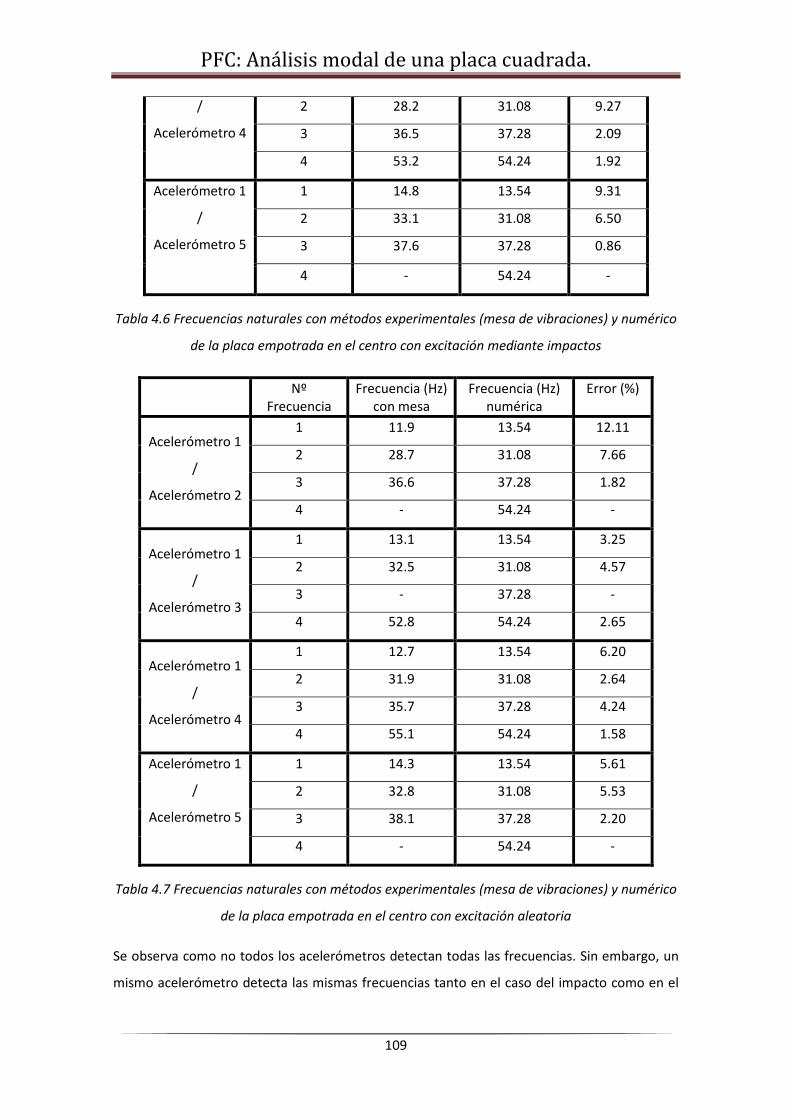
PFC: Análisis modal de una placa cuadrada.
109
/
Acelerómetro 4
2 28.2 31.08 9.27
3 36.5 37.28 2.09
4 53.2 54.24 1.92
Acelerómetro 1
/
Acelerómetro 5
1 14.8 13.54 9.31
2 33.1 31.08 6.50
3 37.6 37.28 0.86
4 - 54.24 -
Tabla 4.6 Frecuencias naturales con métodos experimentales (mesa de vibraciones) y numérico
de la placa empotrada en el centro con excitación mediante impactos
Nº Frecuencia
Frecuencia (Hz) con mesa
Frecuencia (Hz) numérica
Error (%)
Acelerómetro 1
/
Acelerómetro 2
1 11.9 13.54 12.11
2 28.7 31.08 7.66
3 36.6 37.28 1.82
4 - 54.24 -
Acelerómetro 1
/
Acelerómetro 3
1 13.1 13.54 3.25
2 32.5 31.08 4.57
3 - 37.28 -
4 52.8 54.24 2.65
Acelerómetro 1
/
Acelerómetro 4
1 12.7 13.54 6.20
2 31.9 31.08 2.64
3 35.7 37.28 4.24
4 55.1 54.24 1.58
Acelerómetro 1
/
Acelerómetro 5
1 14.3 13.54 5.61
2 32.8 31.08 5.53
3 38.1 37.28 2.20
4 - 54.24 -
Tabla 4.7 Frecuencias naturales con métodos experimentales (mesa de vibraciones) y numérico
de la placa empotrada en el centro con excitación aleatoria
Se observa como no todos los acelerómetros detectan todas las frecuencias. Sin embargo, un
mismo acelerómetro detecta las mismas frecuencias tanto en el caso del impacto como en el
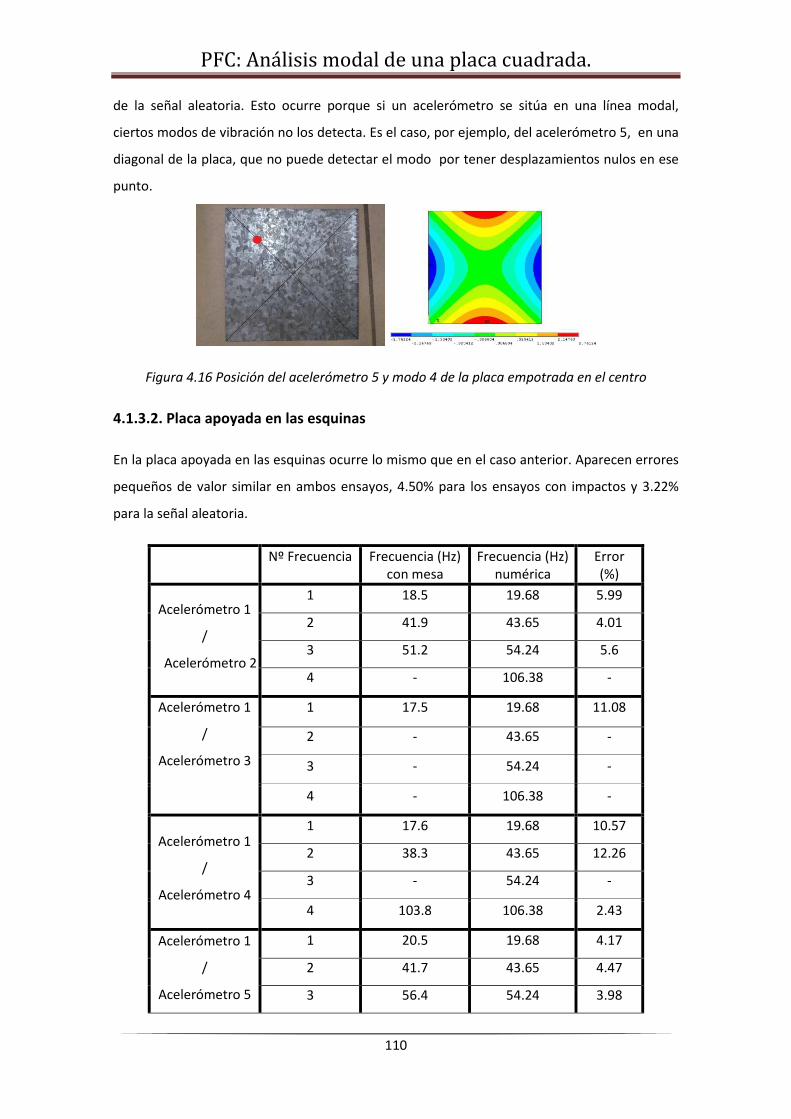
PFC: Análisis modal de una placa cuadrada.
110
de la señal aleatoria. Esto ocurre porque si un acelerómetro se sitúa en una línea modal,
ciertos modos de vibración no los detecta. Es el caso, por ejemplo, del acelerómetro 5, en una
diagonal de la placa, que no puede detectar el modo por tener desplazamientos nulos en ese
punto.
Figura 4.16 Posición del acelerómetro 5 y modo 4 de la placa empotrada en el centro
4.1.3.2. Placa apoyada en las esquinas
En la placa apoyada en las esquinas ocurre lo mismo que en el caso anterior. Aparecen errores
pequeños de valor similar en ambos ensayos, 4.50% para los ensayos con impactos y 3.22%
para la señal aleatoria.
Nº Frecuencia Frecuencia (Hz) con mesa
Frecuencia (Hz) numérica
Error (%)
Acelerómetro 1
/
Acelerómetro 2
1 18.5 19.68 5.99
2 41.9 43.65 4.01
3 51.2 54.24 5.6
4 - 106.38 -
Acelerómetro 1
/
Acelerómetro 3
1 17.5 19.68 11.08
2 - 43.65 -
3 - 54.24 -
4 - 106.38 -
Acelerómetro 1
/
Acelerómetro 4
1 17.6 19.68 10.57
2 38.3 43.65 12.26
3 - 54.24 -
4 103.8 106.38 2.43
Acelerómetro 1
/
Acelerómetro 5
1 20.5 19.68 4.17
2 41.7 43.65 4.47
3 56.4 54.24 3.98
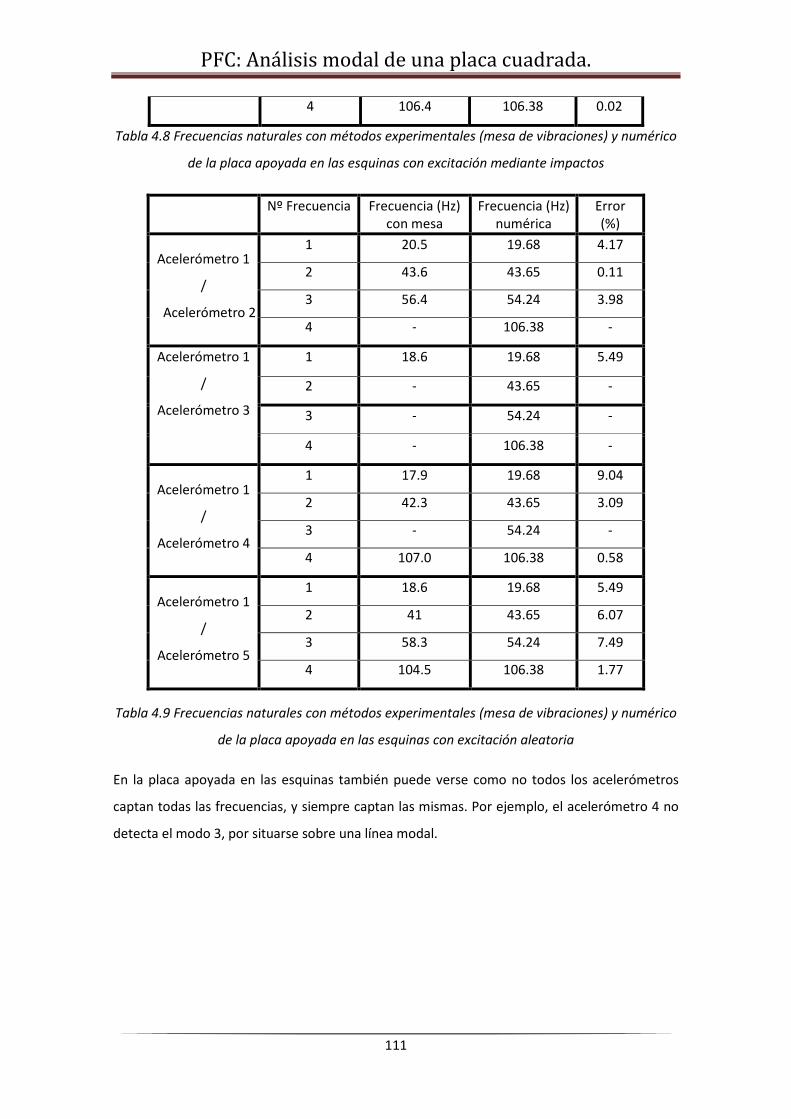
PFC: Análisis modal de una placa cuadrada.
111
4 106.4 106.38 0.02
Tabla 4.8 Frecuencias naturales con métodos experimentales (mesa de vibraciones) y numérico
de la placa apoyada en las esquinas con excitación mediante impactos
Nº Frecuencia Frecuencia (Hz) con mesa
Frecuencia (Hz) numérica
Error (%)
Acelerómetro 1
/
Acelerómetro 2
1 20.5 19.68 4.17
2 43.6 43.65 0.11
3 56.4 54.24 3.98
4 - 106.38 -
Acelerómetro 1
/
Acelerómetro 3
1 18.6 19.68 5.49
2 - 43.65 -
3 - 54.24 -
4 - 106.38 -
Acelerómetro 1
/
Acelerómetro 4
1 17.9 19.68 9.04
2 42.3 43.65 3.09
3 - 54.24 -
4 107.0 106.38 0.58
Acelerómetro 1
/
Acelerómetro 5
1 18.6 19.68 5.49
2 41 43.65 6.07
3 58.3 54.24 7.49
4 104.5 106.38 1.77
Tabla 4.9 Frecuencias naturales con métodos experimentales (mesa de vibraciones) y numérico
de la placa apoyada en las esquinas con excitación aleatoria
En la placa apoyada en las esquinas también puede verse como no todos los acelerómetros
captan todas las frecuencias, y siempre captan las mismas. Por ejemplo, el acelerómetro 4 no
detecta el modo 3, por situarse sobre una línea modal.
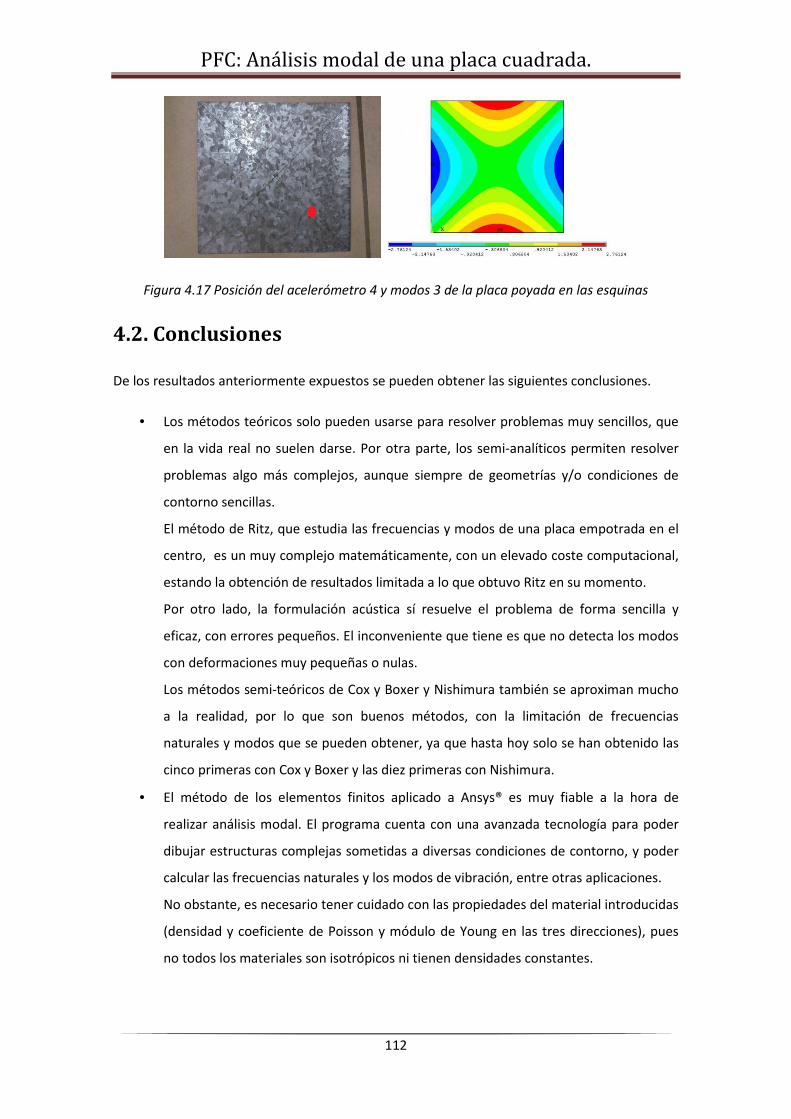
PFC: Análisis modal de una placa cuadrada.
112
Figura 4.17 Posición del acelerómetro 4 y modos 3 de la placa poyada en las esquinas
4.2. Conclusiones
De los resultados anteriormente expuestos se pueden obtener las siguientes conclusiones.
• Los métodos teóricos solo pueden usarse para resolver problemas muy sencillos, que
en la vida real no suelen darse. Por otra parte, los semi-analíticos permiten resolver
problemas algo más complejos, aunque siempre de geometrías y/o condiciones de
contorno sencillas.
El método de Ritz, que estudia las frecuencias y modos de una placa empotrada en el
centro, es un muy complejo matemáticamente, con un elevado coste computacional,
estando la obtención de resultados limitada a lo que obtuvo Ritz en su momento.
Por otro lado, la formulación acústica sí resuelve el problema de forma sencilla y
eficaz, con errores pequeños. El inconveniente que tiene es que no detecta los modos
con deformaciones muy pequeñas o nulas.
Los métodos semi-teóricos de Cox y Boxer y Nishimura también se aproximan mucho
a la realidad, por lo que son buenos métodos, con la limitación de frecuencias
naturales y modos que se pueden obtener, ya que hasta hoy solo se han obtenido las
cinco primeras con Cox y Boxer y las diez primeras con Nishimura.
• El método de los elementos finitos aplicado a Ansys® es muy fiable a la hora de
realizar análisis modal. El programa cuenta con una avanzada tecnología para poder
dibujar estructuras complejas sometidas a diversas condiciones de contorno, y poder
calcular las frecuencias naturales y los modos de vibración, entre otras aplicaciones.
No obstante, es necesario tener cuidado con las propiedades del material introducidas
(densidad y coeficiente de Poisson y módulo de Young en las tres direcciones), pues
no todos los materiales son isotrópicos ni tienen densidades constantes.

PFC: Análisis modal de una placa cuadrada.
113
También se debe estudiar en profundidad el tipo de elemento a usar para definir el
dominio, ya que se puede introducir un dominio de estudio incorrecto e inducir fallos
en el cálculo de frecuencias y modos.
• Se ha visto que los métodos experimentales son fiables a la hora de obtener
frecuencias y modos de vibración.
Con respecto a Pimento® y a Testlab®, las frecuencias se obtienen con errores bajos, y
los modos se identifican bien. No obstante, son difíciles de representar debido a que
el objeto de estudio es un plano y no está formado por líneas, como ocurre en otros
estudios cuyos resultados son mejores [40][41].
Durante la ejecución de los ensayos se ha visto la importancia de dar golpes limpios,
ya que afecta en gran medida a la obtención de frecuencias y modos.
Por otra parte, la mesa de vibraciones estima las frecuencias naturales de la placa. No
obstante, presenta dos grandes problemas.
El primero de ellos es que no puede representar los modos de vibración. Al no contar
con ninguna aplicación que permita introducir una geometría en el programa,
imposibilita la representación de estos modos.
El otro gran hándicap es que no "detecta" las frecuencias naturales. El programa
Signal Calc Mobilyzer® construye una función de transferencia entre dos
acelerómetros. Sin embargo, no analiza esta función para detectar distintas
frecuencias. Esto hace que la persona que realice los ensayos deba seleccionar las
distintas frecuencias, cosa que puede llevar a error seleccionando picos que no
corresponde a frecuencias y obviando otros más débiles que sí.

PFC: Análisis modal de una placa cuadrada.
114
ANEXO A. MANUAL BÁSICO DE USO DE LA MESA DE
VIBRACIONES
A.1. Identificación de componentes
Los diferentes componentes que forman la mesa de vibraciones son:
• Mesa vibratoria. El interior de la mesa vibratoria contiene dos bobinas magnéticas.
Cuando se pulsa start/stop una de las bobinas se magnetiza, y cuando se pulsa drive
sucede lo mismo con la otra, lo que provoca el movimiento de la cabeza hacia arriba y
hacia abajo. La mesa vibratoria cuenta con dos mesas de ensayo, una en vertical (parte
circular) y otra en horizontal (parte cuadrada).
Figura A.1 Mesa de vibraciones
• Amplificador. Desde este elemento se pone en marcha la mesa de vibraciones.
Además, en su panel de control están situados los controladores e indicadores de los
ensayos.
Figura A.2 Amplificador
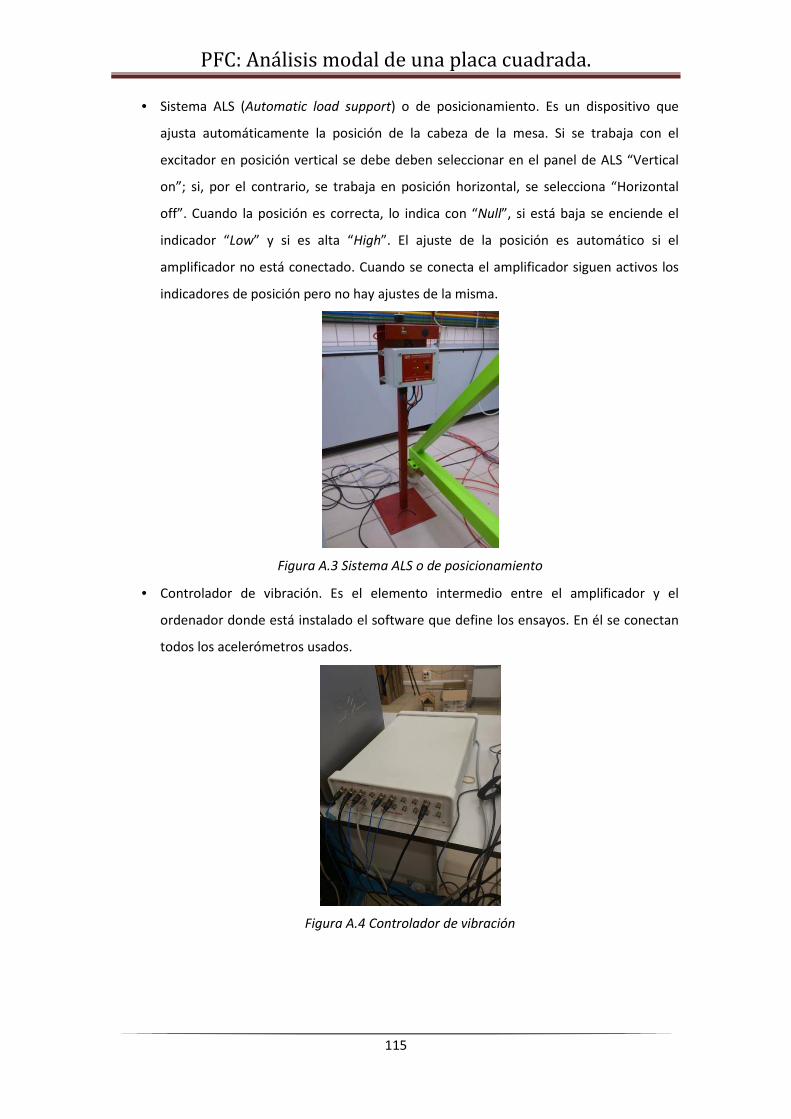
PFC: Análisis modal de una placa cuadrada.
115
• Sistema ALS (Automatic load support) o de posicionamiento. Es un dispositivo que
ajusta automáticamente la posición de la cabeza de la mesa. Si se trabaja con el
excitador en posición vertical se debe deben seleccionar en el panel de ALS “Vertical
on”; si, por el contrario, se trabaja en posición horizontal, se selecciona “Horizontal
off”. Cuando la posición es correcta, lo indica con “Null”, si está baja se enciende el
indicador “Low” y si es alta “High”. El ajuste de la posición es automático si el
amplificador no está conectado. Cuando se conecta el amplificador siguen activos los
indicadores de posición pero no hay ajustes de la misma.
Figura A.3 Sistema ALS o de posicionamiento
• Controlador de vibración. Es el elemento intermedio entre el amplificador y el
ordenador donde está instalado el software que define los ensayos. En él se conectan
todos los acelerómetros usados.
Figura A.4 Controlador de vibración

PFC: Análisis modal de una placa cuadrada.
116
A.2. Controladores e indicadores
Se muestra una foto del panel de controladores e indicadores.
Figura A.5 Panel de controladores e indicadores
En ella aparecen los siguientes controladores e indicadores:
• Llave maestra. Tiene tres posiciones:
- Inhibit: en esta posición el amplificador está desactivado.
- Remote: el control del panel queda desactivado y se activa un control remoto.
- Local: el control del panel se habilita.
• Drive. Cuando está iluminado indica que la señal de comando o drive está activada. Se
debe dejar pulsado durante 2-3 segundos, hasta que quede iluminado, para activarlo.
• Internal/External. Selecciona entre el oscilador interno, de 400Hz, o uno externo.
• Gain. Es un control rotativo de la ganancia. Suministra hasta 37dB de ganancia
amplificada.
• Medidor de voltaje (Voltage). Está escalado desde 0% hasta 110%, donde el 100%
corresponde a 72V rms, es decir, el máximo nivel de voltaje.
• Medidor de corriente (Current): Está escalado desde 0% hasta 110%. Este escalado es
automático cuando el módulo de potencia está conectado con el amplificador. Para el
modelo de amplificador del Laboratorio de Ingeniería Mecánica de la ETSI de la US
(modelo DSA4-16k), el 100% corresponde con 222A rms.
• Indicador de estado (Status). Aparecen 18 leds, que son los siguientes:
- Modules 1-6: indica el número de los módulos de potencia conectados.
- Timer: al iluminarse indica que el amplificador está listo para usarse.
- Enable: un fallo en un módulo de potencia apaga este led y para el amplificador.
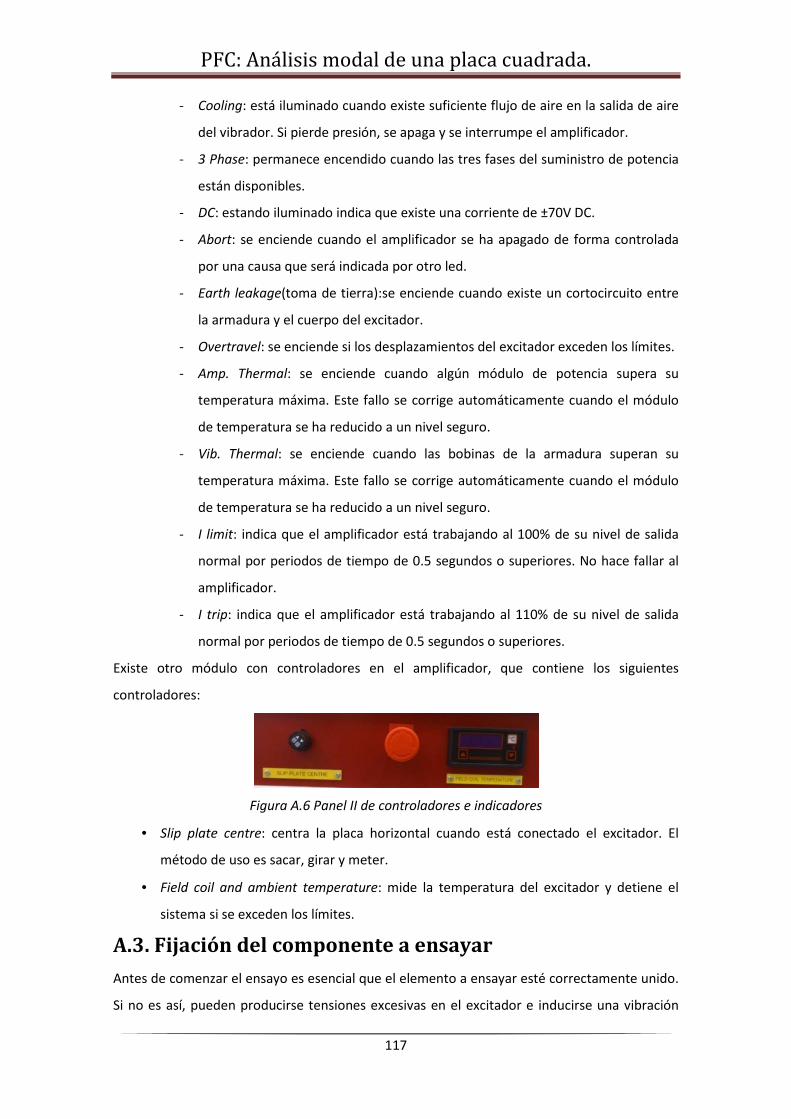
PFC: Análisis modal de una placa cuadrada.
117
- Cooling: está iluminado cuando existe suficiente flujo de aire en la salida de aire
del vibrador. Si pierde presión, se apaga y se interrumpe el amplificador.
- 3 Phase: permanece encendido cuando las tres fases del suministro de potencia
están disponibles.
- DC: estando iluminado indica que existe una corriente de ±70V DC.
- Abort: se enciende cuando el amplificador se ha apagado de forma controlada
por una causa que será indicada por otro led.
- Earth leakage(toma de tierra):se enciende cuando existe un cortocircuito entre
la armadura y el cuerpo del excitador.
- Overtravel: se enciende si los desplazamientos del excitador exceden los límites.
- Amp. Thermal: se enciende cuando algún módulo de potencia supera su
temperatura máxima. Este fallo se corrige automáticamente cuando el módulo
de temperatura se ha reducido a un nivel seguro.
- Vib. Thermal: se enciende cuando las bobinas de la armadura superan su
temperatura máxima. Este fallo se corrige automáticamente cuando el módulo
de temperatura se ha reducido a un nivel seguro.
- I limit: indica que el amplificador está trabajando al 100% de su nivel de salida
normal por periodos de tiempo de 0.5 segundos o superiores. No hace fallar al
amplificador.
- I trip: indica que el amplificador está trabajando al 110% de su nivel de salida
normal por periodos de tiempo de 0.5 segundos o superiores.
Existe otro módulo con controladores en el amplificador, que contiene los siguientes
controladores:
Figura A.6 Panel II de controladores e indicadores
• Slip plate centre: centra la placa horizontal cuando está conectado el excitador. El
método de uso es sacar, girar y meter.
• Field coil and ambient temperature: mide la temperatura del excitador y detiene el
sistema si se exceden los límites.
A.3. Fijación del componente a ensayar
Antes de comenzar el ensayo es esencial que el elemento a ensayar esté correctamente unido.
Si no es así, pueden producirse tensiones excesivas en el excitador e inducirse una vibración

PFC: Análisis modal de una placa cuadrada.
118
significativamente mayor que la que se pretende aplicar, pudiendo causar daños en la pieza
ensayada. Para evitar estos daños se recomienda que:
• La fijación del componente a ensayar sea tal que su centro de gravedad coincida con el
centro de gravedad del excitador.
• El componente no sobresalga de la superficie del excitador.
• Las uniones atornilladas estén apretadas con un par de apriete adecuado.
A.4. Comprobaciones antes del encendido
Antes de encender el amplificador se deben realizar las siguientes comprobaciones:
• La salida de aire de la soplante de enfriamiento no puede estar obstruida.
• La altura de los balones no debe ser menor de 90mm tomando como punto de
referencia el suelo.
• El sistema ALS debe estar activo y el led “Null” encendido.
• El componente a ensayar debe estar correctamente unido a la mesa de vibraciones.
• Los acelerómetros deben estar bien fijados mediante pegamento, cera u otro método.
• La bomba tiene que haber estado funcionando 30 minutos antes de aplicar la vibración
en caso de ensayo horizontal.
• El lazo de control cerrado debe estar conectado al acelerómetro y el test programado.
A.5. Encendido
Los pasos a seguir son:
1. Comprobar que la llave esté inhibit. Posteriormente, encender el amplificador por
detrás.
2. Seleccionar internal.
3. Poner el control de ganancia al mínimo.
4. Seleccionar local y comprobar que el aire de la ventilación de la mesa empieza a
funcionar.
5. Cuando el led de timer se encienda, presionar start hasta que el botón quede
iluminado.
6. Presionar el botón drive hasta que quede iluminado. Deben iluminarse los leds:
Module
Timer
Enable

PFC: Análisis modal de una placa cuadrada.
119
Cooling
3Phase
DC
7. Girar cuidadosamente el control de ganancia en dirección horaria y escuchar que
funcione (los indicadores de voltage y current deben funcionar).
8. Volver a su posición inicial la ganancia.
9. Seleccionar external.
10. Conectar el lazo cerrado para el ensayo y programar el test.
11. Cuando el test esté listo, poner el control de ganancia en la posición adecuada,
teniendo en cuenta que el máximo son 400Hz.
A.6. Apagado
Los pasos a seguir son:
1. Asegurarse que el ensayo ha acabado.
2. Poner el control de ganancia a cero.
3. Presionar el botón drive hasta que se apague.
4. Presionar start hasta que se apague.
5. El enfriador continuará funcionando. Si el excitador desprende calor al tocarlo, es
conveniente dejarlo funcionando 30 minutos.
6. Situar el botón en inhibit.
7. Apagar el amplificador en la parte de atrás.
8. Apagar la bomba hidráulica, en el caso que se haya trabajado con la mesa en
horizontal.
A.7. Características técnicas y limitaciones del ensayo
En general, el sistema no debe operar a más del 80% de su capacidad máxima. Los valores
máximos de la máquina son:
• Fuerza: 19450N .
• Desplazamiento: 51mm pico-pico.
• Velocidad: 1.52m/s.
• Aceleración: 49.6g.
• Aceleración de choque: 150g.
• Soporte de carga: 500Kg.
• Frecuencia de resonancia: 2300Hz±5%.
PFC: Análisis modal de una placa cuadrada.
120
Con respecto a la carga máxima que puede soportar, hay que mencionar que en esa carga ya
va incluido el peso de la máquina. Es decir, para hacer un ensayo horizontal la pieza se pone
encima de la armadura, que pesa 40kg, por lo que el peso máximo de la pieza debería ser
460kg. En el caso de un ensayo en horizontal, al peso de la armadura hay que sumarle el de la
cabeza expansora (86.2Kg), el del acoplador horizontal (13.786kg) y el de la mesa horizontal
(48kg), pudiendo pesar la pieza como máximo 312.014kg. En resumen:
• Peso máximo componente a ensayar en vertical: 460kg.
• Peso máximo componente a ensayar en horizontal: 312.014kg.
Cabe mencionar que para pulsos de duración superior a 6ms, se debe disminuir la aceleración
por debajo del doble de la del ensayo senoidal, y que los ensayos de choque deben
programarse siempre en control de desplazamiento.
Por otra parte, las características técnicas del amplificador son:
• 4 módulos de potencia con 16kVA de salida.
• Señal interna de 400Hz.
• Voltaje de salida: 72V.
• Relación señal/ruido > -75dB.
• Distorsión < 0.15% THD.
• Eficiencia 95%.
Las características técnicas de la placa horizontal son:
• Dimensiones: 750x750mm2.
• Superficie de deslizamiento en granito natural pulido con rozamiento muy pequeño.
Las características técnicas de los acelerómetros, de tecnología ICP, se presentan en la
siguiente tabla:
NºSerie Tipo Rango
(g) Sensibilidad
(mV/g)
Sensibilidad transversal
(%)
Frecuencia de resonancia
(kHz)
Rango de temperatura
(°C)
2030897 8704B25 ±25 195 0.8 54 -54,100
2030896 8704B25 ±25 195 0.9 54 -54,100
2024269 8704B50 ±50 104.1 1.1 54 -54,100
2024256 8704B50 ±50 99.7 0.4 54 -54,100
2024270 8704B50 ±50 97.4 0.4 54 -54,100
Tabla A.1 Características técnicas de los acelerómetros

PFC: Análisis modal de una placa cuadrada.
121
A.8. Qué hacer si se interrumpe un ensayo
En general, un ensayo puede interrumpirse por dos razones:
• Problemas en el sistema de control.
Suelen estar causadas por defectos en los acelerómetros, los cables o el amplificador.
Se deben comprobar las conexiones .Si el problema persiste, se debe conectar la salida
del controlador a la entrada y comprobar que el controlador funciona correctamente
por sí solo.
Otra posible causa es que la posición elegida para situar el acelerómetro sea
inadecuada y que la respuesta de vibración en esa zona sea pequeña.
• Problemas en el excitador o shaker.
Si el excitador es el problema, comprobar el amplificador para ver qué función es la
que causa el fallo.
Si el indicador de fallo o Abort está encendido puede ser que el excitador esté
sobrecargado. En ese caso comprobar que el ensayo programado está dentro de los
límites del excitador.
A.9. Diagnóstico de fallos
En el apartado 2 de este anexo se describieron los indicadores del controlador y las posibles
causas que los activaban. No obstante, hay otras formas de detectar fallos, que son:
Síntoma Posible causa Solución
No vibra Pérdida de potencia Comprobar las 3 fases de la fuente de potencia
Baja ganancia en amplificación Ajustar el control de ganancia
No amplifica la señal de entrada Resetear el controlador de ganancia, seleccionar Internal
y probar el lazo abierto de operación. Chequear cables entre controlador y amplificador.
No hay suministro Comprobar suministro del shaker y fusibles del terminal 26 en la parte trasera del armario
Circuito abierto Comprobar cables y la impedancia de la bobina
Cortocircuito Comprobar cables y la impedancia de la bobina
El vibrador falla Comprobar si hay holgura en el montaje, el sobrecalentamiento (AC oil) y si hay agrietamiento o rotura de la suspensión
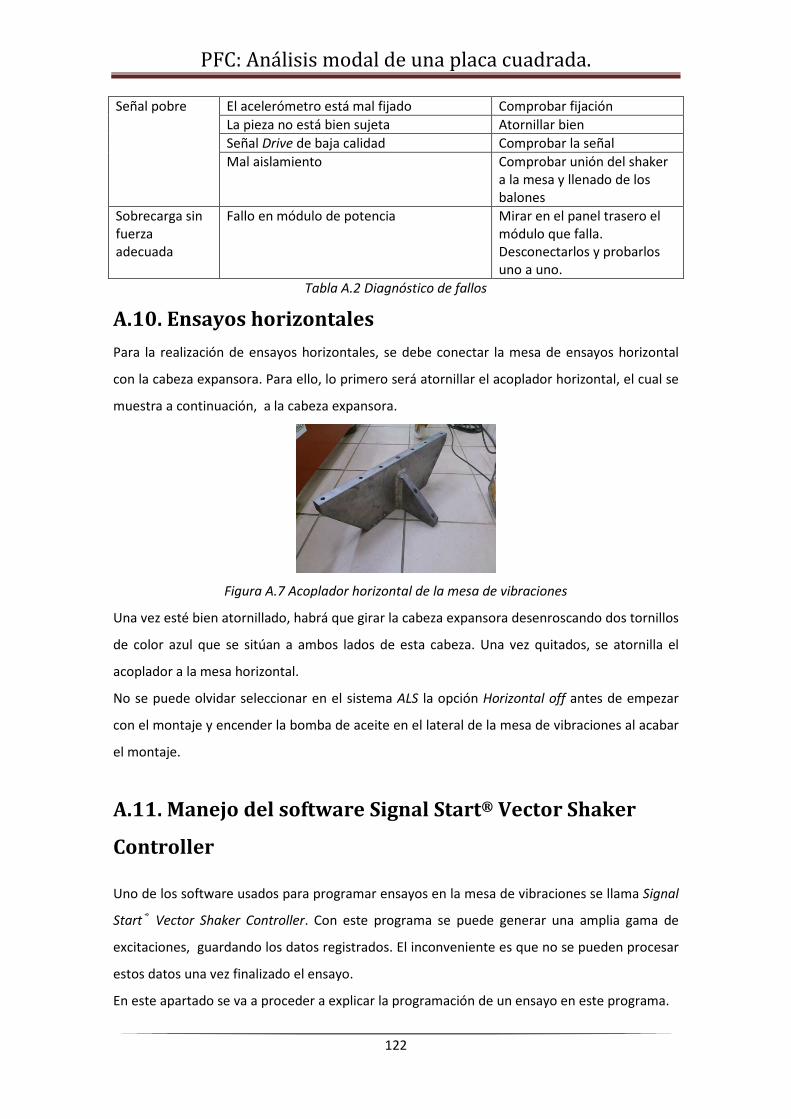
PFC: Análisis modal de una placa cuadrada.
122
Señal pobre El acelerómetro está mal fijado Comprobar fijación
La pieza no está bien sujeta Atornillar bien
Señal Drive de baja calidad Comprobar la señal
Mal aislamiento Comprobar unión del shaker a la mesa y llenado de los balones
Sobrecarga sin fuerza adecuada
Fallo en módulo de potencia Mirar en el panel trasero el módulo que falla. Desconectarlos y probarlos uno a uno.
Tabla A.2 Diagnóstico de fallos
A.10. Ensayos horizontales
Para la realización de ensayos horizontales, se debe conectar la mesa de ensayos horizontal
con la cabeza expansora. Para ello, lo primero será atornillar el acoplador horizontal, el cual se
muestra a continuación, a la cabeza expansora.
Figura A.7 Acoplador horizontal de la mesa de vibraciones
Una vez esté bien atornillado, habrá que girar la cabeza expansora desenroscando dos tornillos
de color azul que se sitúan a ambos lados de esta cabeza. Una vez quitados, se atornilla el
acoplador a la mesa horizontal.
No se puede olvidar seleccionar en el sistema ALS la opción Horizontal off antes de empezar
con el montaje y encender la bomba de aceite en el lateral de la mesa de vibraciones al acabar
el montaje.
A.11. Manejo del software Signal Start® Vector Shaker
Controller
Uno de los software usados para programar ensayos en la mesa de vibraciones se llama Signal
Start® Vector Shaker Controller. Con este programa se puede generar una amplia gama de
excitaciones, guardando los datos registrados. El inconveniente es que no se pueden procesar
estos datos una vez finalizado el ensayo.
En este apartado se va a proceder a explicar la programación de un ensayo en este programa.

PFC: Análisis modal de una placa cuadrada.
123
Al abrirlo, se podrá ver la ventana principal, donde se puede elegir abrir un test existente o
crear uno nuevo.
Figura A.8 Aspecto general del programa Signal Start Vector Shaker Controller
Al empezar un nuevo test, saldrá una nueva pantalla en la que se debe seleccionar el tipo de
ensayo a realizar.
Figura A.9 Elección del tipo de test
Las distintas opciones que ofrece el programa son:
• Random: es una excitación aleatoria.
• Sine-on-random(SOR): mezcla señales sinusoidales y aleatorias.
• Random-on-random(ROR): mezcla bandas anchas y estrechas elegidas al azar.
• Sine: realiza el control con señales sinusoidales.
• Classical shock (Shock): realiza el control con impulsos.
• Shock response spectrum(SRS): controla el transitorio de un pulso.
• Transient: estudia del transitorio de la señal.
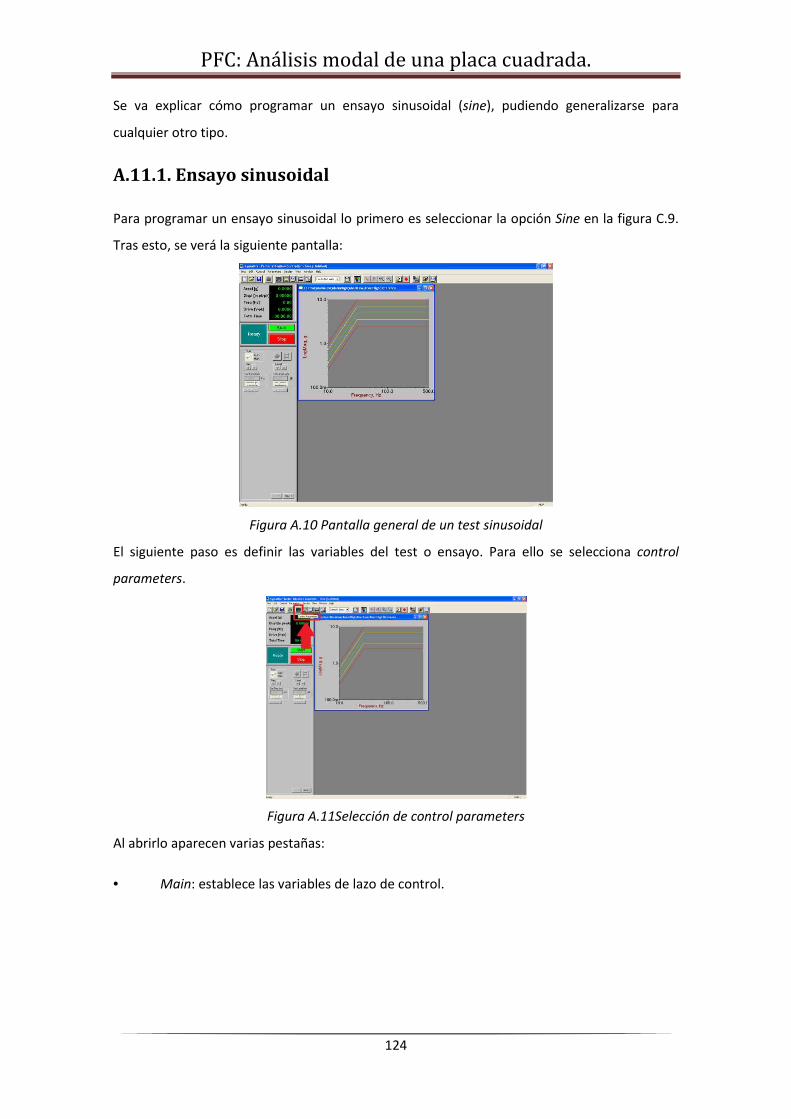
PFC: Análisis modal de una placa cuadrada.
124
Se va explicar cómo programar un ensayo sinusoidal (sine), pudiendo generalizarse para
cualquier otro tipo.
A.11.1. Ensayo sinusoidal
Para programar un ensayo sinusoidal lo primero es seleccionar la opción Sine en la figura C.9.
Tras esto, se verá la siguiente pantalla:
Figura A.10 Pantalla general de un test sinusoidal
El siguiente paso es definir las variables del test o ensayo. Para ello se selecciona control
parameters.
Figura A.11Selección de control parameters
Al abrirlo aparecen varias pestañas:
• Main: establece las variables de lazo de control.

PFC: Análisis modal de una placa cuadrada.
125
Figura A.12 Menú Main
- Title: título para identificar el test o ensayo. Puede tener un máximo de 40
caracteres.
- Max Drive Volts: máximo pico de voltaje alcanzado por el drive en el test. Así se
protege el amplificador de potencia. Está activo durante todo el ensayo. Los
valores pueden ir desde 0.01V hasta 10V, aunque hay que ajustarlo lo máximo
posible. Un buen valor inicial es 2.5V.
nt� Û�%Ï� �YI�Z ∈ ,0.01,10-� - Amp Compression: define cómo de rápido ajusta el drive los cambios en la señal
de control. Este parámetro establece el radio de compresión de la amplitud del
lazo de control y determina la cantidad de amortiguamiento de la señal senoidal
aplicada en el proceso digital de control. El amortiguamiento se usa para
mantener la señal del drive estable sin que se produzcan oscilaciones.
Si tiene un valor bajo, el amortiguamiento es pequeño y hay un ajuste rápido. Si,
por el contrario, tiene un valor alto, el amortiguamiento es elevado y la
corrección del drive es más gradual.
Su valor puede variar entre 1 y 99. Un buen valor inicial es 4. X�� qY����ZZ%Y\ ∈ ,1,99- - Freq Compression: es usado en la resonancia. Define la cantidad de
amortiguamiento aplicada al seno para estabilizar el lazo de control.
Si vale 1, el sistema no tiene amortiguamiento. Si es alta, la corrección es más
gradual.
Su valor debe ser mayor de 1 y menor de 99. Se suele incrementar/decrementar
el valor multiplicando/dividiendo la frecuencia por 2. Un buen valor para
comenzar es 2. ���¤ qY����ZZ%Y\ ∈ ,1,99-

PFC: Análisis modal de una placa cuadrada.
126
- Startup Rate (dB/sec): especifica la tasa con la que se incrementa el nivel de
demanda al inicio del ensayo y como de rápido el sistema sube las rampas. Su
valor debe estar entre 0.1dB/s y 10 dB/s.
K�t��Î� >t�� ∈ [0.1,10-§[/Z
- ShutDown Rate (dB/sec): determina como de rápido la señal va del nivel máximo
a apagado cuando se aborta el ensayo o cuando acaba. Debe estar entre 0.1
dB/s y 100 dB/s. KℎÎ�ÛYº\ >t�� ∈ ,0.1,100-§[/Z
- Open Loop Threshold (dB o %): si la señal de control cae por debajo de este nivel
durante el barrido del seño y el sistema no está limitado, el sistema abortará
debido a la apertura del circuito. Debe estar entre -110dB y -10dB, o entre
0.0003% y 31.6228%. F��\ MYY� Áℎ��ZℎYI§ ∈ ,−110, −10-§[ ó ∈ ,0.0003,31.6228-%
- Sweep mode: es el modo de barrido. Puede ser lineal o logarítmico:
- Log Rate: logarítmico en octavos/min.
- Log Time: logarítmico en tiempo por barrido.
- Linear Rate: lineal en Hz/s.
- Linear Time: lineal en tiempo por barrido.
- Sweeprate Oct/min: especifica la rapidez del barrido. Si se ha elegido en el
parámetro anterior Log Rate, entonces irá en oct/min; si es Linear Rate, en Hz/s,
y si es Log Time o Linear Time entonces es el número de segundos que tarda en
barrer un rango de frecuencias entero.
• Selfcheck: define el auto-chequeo (modo, nivel y voltaje).
Figura A.13 Menú Selfcheck

PFC: Análisis modal de una placa cuadrada.
127
- Max Drive Volts: máximo pico de voltaje alcanzado por el drive en el auto
chequeo, no en el test entero. Es un parámetro de seguridad que protege el test
cuando el lazo de control está abierto.
Su valor debe estar entre 0.1V y 10V. Se puede empezar probando con 2.5V.
nt� Û�%Ï� �YI�Z ∈ ,0.1,10-�
- SelfCheck Start Level (dB): va en función del valor de Max Volts. Al valor que se le
ponga se le añaden 20dB negativos.
K�Iqℎ��� K�t�� M�Ï�I ∈ ,−60,0-§[
- Time out (sec): determina el tiempo que la señal del drive continúa hasta la
salida durante el chequeo. Este parámetro comienza cuando se alcanza el
máximo pico de voltaje.
Su valor debe estar entre 1 y 500 segundos. Á%�� YÎ� ∈ ,1,500-Z
• Shaker: define las características del excitador.
Figura A.14 Manú Shaker
- Low Frequency: frecuencia de corte más baja de la respuesta en frecuencia del
excitador. Su valor es de 5Hz. MYº ���¤Î�\�_ = 5��
- Max Velocity: máxima velocidad que el excitador puede soportar. Su valor es
1520mm/s. nt� ��IY�%�_ = 1520��/Z
- Max Accel: máxima aceleración que el excitador puede soportar. Su valor es 20g,
aunque, si es necesario, se puede establecer en 50g. nt� X���I = 20£
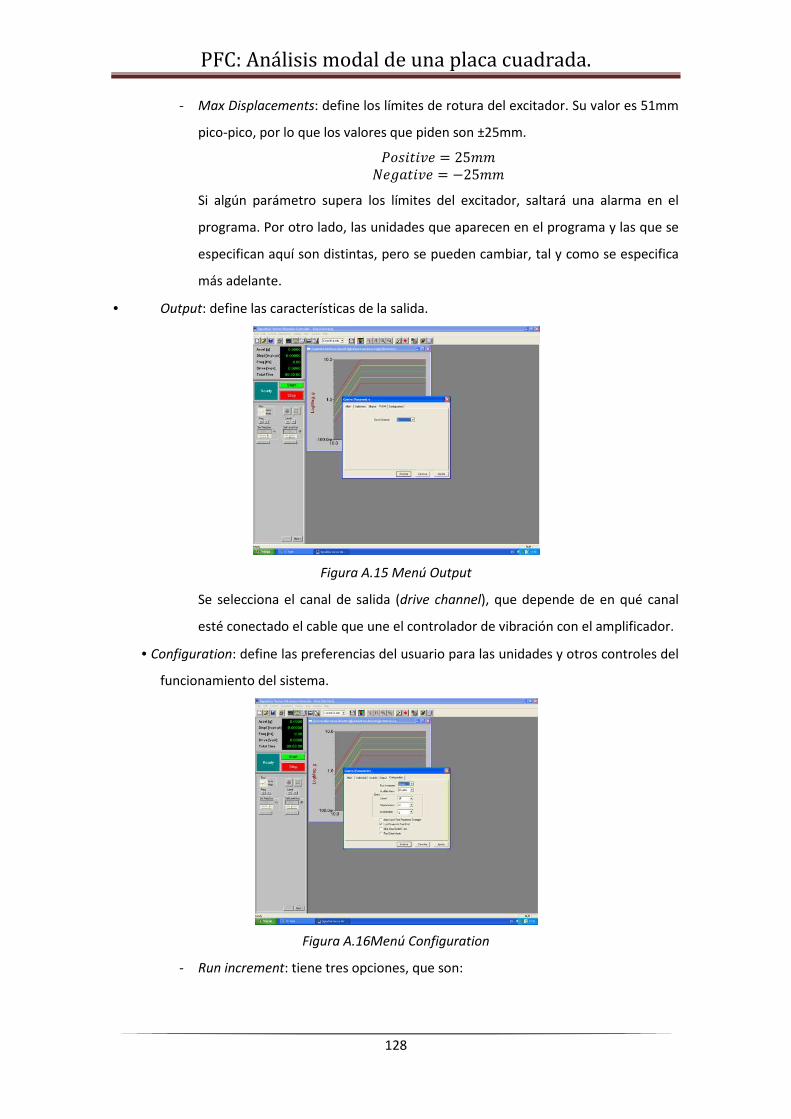
PFC: Análisis modal de una placa cuadrada.
128
- Max Displacements: define los límites de rotura del excitador. Su valor es 51mm
pico-pico, por lo que los valores que piden son ±25mm. çYZ%�%Ï� = 25��K�£t�%Ï� = −25��
Si algún parámetro supera los límites del excitador, saltará una alarma en el
programa. Por otro lado, las unidades que aparecen en el programa y las que se
especifican aquí son distintas, pero se pueden cambiar, tal y como se especifica
más adelante.
• Output: define las características de la salida.
Figura A.15 Menú Output
Se selecciona el canal de salida (drive channel), que depende de en qué canal
esté conectado el cable que une el controlador de vibración con el amplificador.
• Configuration: define las preferencias del usuario para las unidades y otros controles del
funcionamiento del sistema.
Figura A.16Menú Configuration
- Run increment: tiene tres opciones, que son:

PFC: Análisis modal de una placa cuadrada.
129
- Next: incrementa el número de run automáticamente después de cada
ensayo. El ensayo se guarda y el número de run se incrementa en una
unidad, y creándose uno nuevo.
- Overwrite: escribe encima del ensayo hecho con anterioridad.
- Query: pregunta en todos los ensayos si se quiere guardarlo o
sobrescribirlo.
- Audible Alarm: se puede activar o desactivar una alarma sonora.
- Units: se eligen las unidades del nivel (dB o %), el desplazamiento (in, m o mm) y
la aceleración (in/s2, m/s2, mm/s2 o g). La velocidad será expresada en la unidad
elegida para el desplazamiento dividida por segundo.
- Auto Save Test Parameter Changes: si se marca, los cambios se guardan
automáticamente.
- Use Review At Test End: al marcarse se pueden ver los resultados del test al
finalizarse.
- Skip Stop Switch Test: al marcarlo deshabilita el botón rojo de aborto. Es
conveniente no marcarlo.
El siguiente paso es definir los niveles de control, seleccionando un rango de frecuencias
combinado con líneas de aceleración, velocidad o desplazamiento constantes o variables. Para
ello, se pulsa en Reference.
Figura A.17 Selección de Reference
Al seleccionar reference aparece la siguiente ventana con distintas opciones:

PFC: Análisis modal de una placa cuadrada.
130
Figura A.18 Menú Reference
• Method: solo se puede seleccionar la opción table.
• Interpret Displacement As: tiene dos opciones,
- 0 to PK: el desplazamiento se establece desde cero hasta el máximo o el mínimo,
es decir, la amplitud. Es el que se suele usar.
Figura A.19 Desplazamiento 0-pico
- PK to PK: el desplazamiento se establece desde el máximo al mínimo, es decir, el
doble de la amplitud.
Figura A.20 Desplazamiento pico-pico
• Limit Spec: establece los límites de aborto relativo a la referencia, y se aplica a las
columnas Alarm Low, Alarm High, Abort Low y Abort High de la tabla. Puede ir en dB o
%.
• Abort Sensitivity: es la tolerancia o número de veces que se puede sobrepasar los
límites de aborto antes de que el ensayo aborte realmente. El valor debe estar entre 1
y 32, aunque un buen valor es 4 o 8. XxY�� K�\Z%�%Ï%�_ ∈ [1,32- • Freq: es la frecuencia del pulso seleccionado. En un seno, es la última, o más baja,
frecuencia del segmento. Las frecuencias deben estar dentro del rango especificado en
el menú Run Schedule.

PFC: Análisis modal de una placa cuadrada.
131
• Ref: se introduce el valor de la aceleración, velocidad o desplazamiento en las
unidades que corresponda.
• Type: define si el segmento es de aceleración, velocidad o desplazamiento. Los
segmentos de valor constantes aparecen como líneas rectas en escala doblemente
logarítmica. Las posibles opciones son:
Tipo Descripción
CA Define una línea recta de aceleración constante
CV Define una línea recta de velocidad constante
CD Define una línea recta de desplazamiento constante
VA Define la aceleración en el primer punto y lo conecta con la próxima frecuencia
con una línea recta
VV Define la velocidad en el primer punto y lo conecta con la próxima frecuencia
con una línea recta
VD Define el desplazamiento en el primer punto y lo conecta con la próxima
frecuencia con una línea recta
?CA Define una línea recta con una aceleración constante que requiere el sistema para calcular la frecuencia para la cual esta y la línea recta previa se cruzan
?CV Define una línea recta con una velocidad constante que requiere el sistema para
calcular la frecuencia para la cual esta y la línea recta previa se cruzan
?CD Define una línea recta con un desplazamiento constante que requiere el sistema
para calcular la frecuencia para la cual esta y la línea recta previa se cruzan
Tabla A.3Tipos de gráficos de Reference
• AlarmLow/High: son los límites superior e inferior de alarma.
• AbortLow/High: son los límites superior e inferior de aborto del ensayo.
El siguiente paso es abrir el menú Input Channels para definir los canales de entrada.
Figura A.21 Selección de Input Channels
Al seleccionar input channels aparece la siguiente ventana con distintas opciones:

PFC: Análisis modal de una placa cuadrada.
132
Figura A.22 Menú Input Channel
• Multi-Channel Control Mode: determina cómo se combinan las medidas de los canales
de salida con la señal de control cuando hay más de un canal designado al control.
Cuando solo hay un canal para el control el modo no afecta. Las diferentes opciones se
presentan en la siguiente tabla.
Modo de control
Descripción
Average Se hace la media con las medidas de todos los canales de control. Si se elige un coeficiente de peso (Wghtcoef) distinto de 1, entonces el valor de ese canal es multiplicado al hacer la media
RMS
Average
Las medias de los canales de control se elevan al cuadro, se suman, se divide por el número de canales de control y se realiza la raíz cuadrada.
Extremal Se elige como control el canal que tenga el valor de pico más elevado entre todos los canales de control.
Open Loop La señal de referencia fija es usada como el espectro de magnitud del drive.
Tabla A.4 Opciones del modo de control
• Tracking Filter: define el tipo de filtro paso-banda aplicado a todas las señales. Hay tres
opciones,
− Off: el filtro está desactivado
− Prop BW: es un filtrado proporcional. Es el que mejor funciona en general.
− Fixed BW: es un filtrado fijo.
Dentro de esta opción hay que elegir el ancho de banda (Band Width). Si se elige
el filtro proporcional (Prop BW), el ancho de banda debe estar entre 0.75% y
100%; si se elige el filtro fijo (Fixed BW), el ancho de banda debe estar entre 1 y
256Hz. [t\§å%§�ℎ ∈ ,0.75,100-% Z% ç�Y� [å[t\§å%§�ℎ ∈ ,1,256-��Z% �%��§ [å
• Chan: es el número del canal.
• Name: es el nombre de cada canal.

PFC: Análisis modal de una placa cuadrada.
133
• Input: se puede seleccionar si el canal es de control (control), de medida (measure) o
está desactivado (off).
• Analy Mode: define el método usado en la medida de la señal del canal. Las distintas
opciones que se pueden elegir son:
Modo de análisis
Descripción
Average Calcula la media rectificada
Peak Determina el valor pico
Filter Filtra algunas frecuencias para medir
RMS Usa el valor RMS o valor eficaz
DC Solo usa las medidas en DC de las señales. La corriente continua es usada para medir propiedades físicas en el test.
Tabla A.5 Tipos de análisis
• mv/EU: es la sensibilidad del acelerómetro.
• EU: son las unidades en que se mide la aceleración. Se puede elegir entre in/s2, mm/s
2,
m/s2o g.
• Scale: relación entre el canal y la señal de control. Se calcula como la división del pico
de aceleración del canal y el pico de aceleración de la señal de control. Es un
coeficiente de amplificación que adapta el rango de funcionamiento del acelerómetro.
Su valor debe estar comprendido entre 0.0001 y 1000.
K�tI� ∈ [0.0001,1000- • WghtCoef: es el peso del canal en el control. Su valor puede estar entre 1 y 999. å£ℎ�qY� ∈ ,1,999- • Coupling: define la tecnología del acelerómetro. Puede ser AC, DC o ICP.
• Limits: solo se usa cuando haya que definir los valores del canal para proteger la
máquina.
El último paso para definir el test es identificar las acciones que se realizarán. Esto se hace en
el menú Run Schedule.

PFC: Análisis modal de una placa cuadrada.
134
Figura A.23 Selección de Run Schedule
Las diferentes acciones que se pueden realizar son las siguientes:
Figura A.24 Acciones que se pueden realizar en un ensayo
• Sweep: realiza un barrido entre dos frecuencias. Se puede realizar en tiempo, en
número de barridos o en número de ciclos.
• Level: define el nivel de control para los siguientes estados del Run Schedule. Se puede
elevar o disminuir las especificaciones del nivel antes de programar un barrido o un
dwell. Se pueden especificar las unidades en %, mm, mm/s, mm.Hz o g. Por otra parte,
hay una opción llamada resonant dwell que al marcarla hace un chequeo durante la
operación resonance dwell.
• Amp Compression: define la cantidad de amortiguamiento aplicada por el seno para
asegurar la estabilidad del lazo de control. Su valor debe estar comprendido entre 1 y
99. X�� qY����ZZ%Y\ ∈ [1,99- • Dwell: define una excitación para una frecuencia específica durante un tiempo
determinado. Hay que definir:
− Dwell Frequency: debe estar dentro del rango de frecuencias especificado en la
referencia.

PFC: Análisis modal de una placa cuadrada.
135
− Duración en tiempo o número de ciclos.
Un dwell simple causa que el test suba una rampa en la frecuencia especificada
hasta el nivel definido en la referencia durante el tiempo o número de ciclos
especificado. Luego baja la rampa hasta el final.
• Dwell Series: es una serie automática de excitaciones a distintas frecuencias definidas
en un intervalo. Hay que especificar:
− Start frequency: frecuencia de inicio.
− End frequency: frecuencia final.
− Delta frequency: escalón de frecuencia entre excitaciones.
− Time: tiempo que dura la excitación en cada frecuencia.
− Number os cycles: número de ciclos que dura la excitación en cada frecuencia.
• Res DwellRatio: define los dos canales usados para calcular la función de transferencia.
Deben ser elegidos antes de programar algún test de resonancia.
• Res Search: define un barrido que busca la resonancia. Hay que definir la frecuencia
inicial y la final del barrido.
• Res Dwell: define un barrido en resonancia durante un tiempo determinado. Este
comando debe ir precedido siempre por la búsqueda de resonancia.
• Freq Compression: se usa antes de res dwell si se quiere cambiar la relación de
compresión de la frecuencia de excitación. Su valor debe estar comprendido entre 1 y
99, y un valor típico suele ser 4.
���¤ qY����ZZ%Y\ ∈ [1,99- • Do: inicia un bucle.
• Loop: indica cuantas veces se repite el bucle.
• Save: guarda los datos de la acción realiza previamente. Hay que hacerlo
continuamente, tras cada paso.
• Print Screen: imprime pantalla.
• Zero Signals: hace que la señal de control y de medida vayan a cero.
• Sweep Rate: cambia la relación del barrido.
• Set Control: cambia las entradas de control. Por ejemplo, cambiar el control de los
desplazamiento a bajas frecuencias por el control de las aceleraciones a altas
frecuencias.
• Level Increment: incremente o decrementa el nivel actual en la cantidad especificada.
El incremento puede ser en % o en dB.
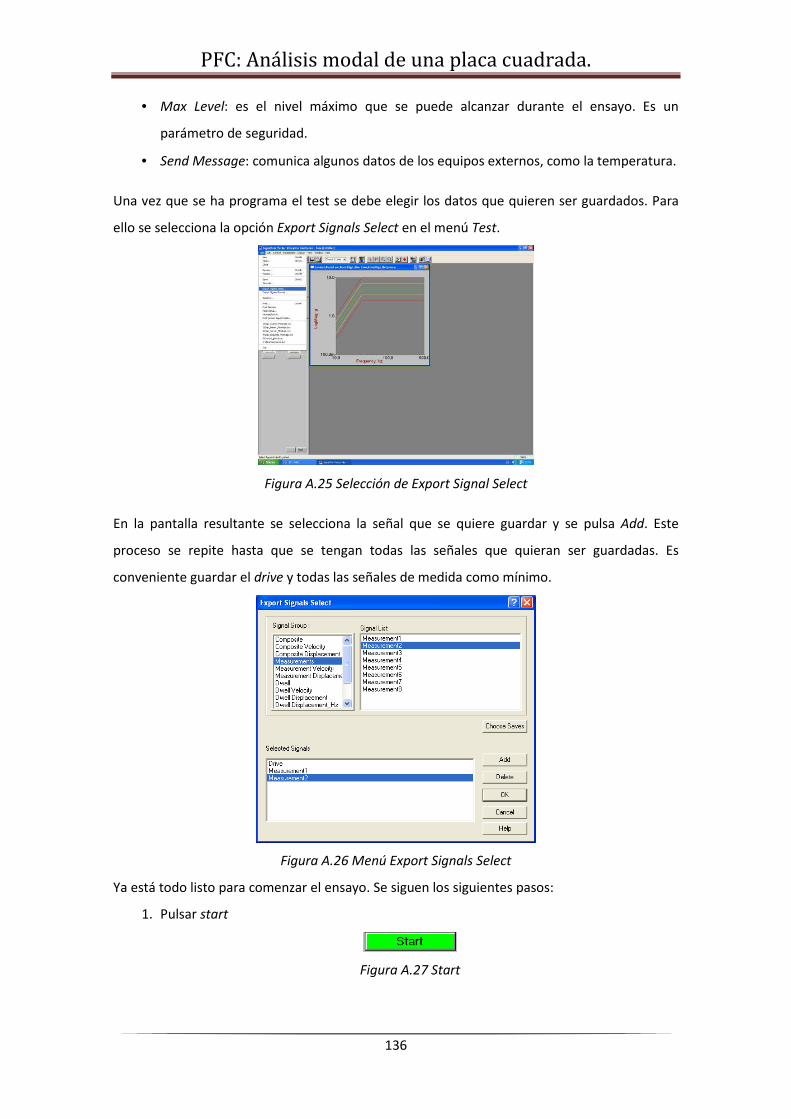
PFC: Análisis modal de una placa cuadrada.
136
• Max Level: es el nivel máximo que se puede alcanzar durante el ensayo. Es un
parámetro de seguridad.
• Send Message: comunica algunos datos de los equipos externos, como la temperatura.
Una vez que se ha programa el test se debe elegir los datos que quieren ser guardados. Para
ello se selecciona la opción Export Signals Select en el menú Test.
Figura A.25 Selección de Export Signal Select
En la pantalla resultante se selecciona la señal que se quiere guardar y se pulsa Add. Este
proceso se repite hasta que se tengan todas las señales que quieran ser guardadas. Es
conveniente guardar el drive y todas las señales de medida como mínimo.
Figura A.26 Menú Export Signals Select
Ya está todo listo para comenzar el ensayo. Se siguen los siguientes pasos:
1. Pulsar start
Figura A.27 Start

PFC: Análisis modal de una placa cuadrada.
137
2. Aparece la pantalla Signal Star Vector Vibration Controller, el que se debe pulsar
aceptar para que empiece el ensayo.
Figura A.28 Comprobación antes de empezar
3. Si no es el primer ensayo que se lleva a cabo con el mismo nombre, aparece la pantalla
run query, en la que se debe elegir si se quiere escribir encima del ensayo que se haya
hecho anteriormente (overwrite) o si se quiere seguir con el anterior (increment)
Figura A.29 Menú Run Query
4. Aparece la ventana Run Notes. Es obligatorio contestar a las preguntas de Operator,
Tests Item y Serial Number. No es necesario poner algo concreto; cualquier cosa es
válida.
Figura A.30 Menú Run Notes
5. Aparece la ventana Stop Switch System Check, en la que debemos pulsar el botón rojo
de parada de emergencia.

PFC: Análisis modal de una placa cuadrada.
138
Figura A.31 Menú Stop Switch System Check y botón de parada de emergencia
Una vez realizados estos pasos empieza el ensayo. Mientras se lleva a cabo, se puede ver el
siguiente panel de control.
Figura A.32 Panel de control
• Accel [g]: muestra el valor de la aceleración durante todo el ensayo.
• Displ [in-pk-pk]: muestra el valor del desplazamiento de la cabeza durante todo el
ensayo.
• Freq [Hz]: muestra la frecuencia y la dirección del barrido.
• Drive [V-pk]: muestra el valor del drive.
• Total Time: muestra el tiempo transcurrido desde el inicio del ensayo.
• Sweep Time: indica si el barrido sube (UP) o baja (DN).
• Remaining: indica el tiempo que queda para que acabe el barrido.
• Panel de control: pueden aparecer diferentes mensaje.
− Ready: indica que el ensayo ha finalizado.
− Control High: indica que la aceleración es mayor que la máxima.
− Control Low: indica que la aceleración es menor que la mínima.
− Switch: indica que algún mecanismo de aborto se ha accionado.
− Max Volts: indica que el drive ha alcanzado el nivel máximo.
− DwellAbort: aparece cuando se aborta el ensayo durante la resonancia.
− Running: indica que el ensayo se está realizando.
− LowAlarm: indica que la señal de control ha sobrepasado el límite inferior.
− High Alarm: indica que la señal de control ha sobrepasado el límite superior.
− ADC Clip: indica que hay una ampliación de la señal en un determinado canal y
no se ha especificado su valor en scale, dentro de input channel.
− Open Loop: indica que el nivel de control es más bajo que el umbral de lazo
abierto.

PFC: Análisis modal de una placa cuadrada.
139
A.12. Manejo del software Signal Calc Mobilyzer®
El software usado para el análisis modal experimental en la mesa de vibraciones se llama
Signal Calc Mobilyzer®. En este apartado se va a proceder a explicar la programación de un
ensayo en este programa.
Al abrirlo, se podrá ver la ventana principal del programa, donde podremos elegir abrir un test
existente o crear uno nuevo.
Al empezar un nuevo test, saldrá una nueva pantalla en la que se debe seleccionar el tipo de
ensayo a realizar.
Figura A.33 Elección del tipo de test
Las distintas opciones que ofrece el programa son:
• Auto Power Spectrum
• Transfer Function
• Correlation
• Synchronous Average
• Histogram
Para el análisis modal se debe seleccionar la opción Transfer Function. Las señales que se
obtienen con este tipo de ensayo son:
• Xx: representación temporal de duración Tspan y resolución dt del canal x.
• Wx: representación temporal de Xx multiplicada por la ventana aplicada al canal x.
• Sx: espectro complejo de Wx con periodo Fspan y resolución dF.
• Sxx: última componente del auto-power spectrum del canal x. Es igual a |Sx|2.
• Sxy: última componente del espectro cruzado entre las entradas Xx y Xy. Es igual a Sx·Sy*.
• Gxx: auto-powerspectrum de la entrada Xx.
• Gxy: espectro cruzado complejo cruzado entre Xx y Xy.
• Hxy: función de transferencia entre la entrada Xx y la salida Xy.

PFC: Análisis modal de una placa cuadrada.
140
• Cxy: función de coherencia entre las entradas Xx y Xy con resolución dF.
• Zxy: función de respuesta de impulso entre las entradas Xx y Xy, de duración Tspan y
resolución dT.
La programación de este tipo de test se explica a continuación.
A.12.1. Ensayo con Transfer Function
Para realizar un estudio de análisis modal lo primero es seleccionar la opción Transfer Function
en la figura C.33. Tras esto, se verá la siguiente pantalla:
Figura A.34 Pantalla general de Transfer Function
El primer paso es definir las variables de medida. Esto se realiza en Measurement Parameters.
Figura A.35Menú Measurement Parameters
• Preview Average: se activa cuando se realizan estudios de análisis modal mediante
impactos. Al estar activada permite inspeccionar cada captura antes de incluirla en el
proceso de cálculo del promedio.

PFC: Análisis modal de una placa cuadrada.
141
• Session trigger: al activar esta casilla, el sistema espera al primer trigger para comenzar
a medir. Se suele activar si se elige Free Run como tipo de trigger.
• Avgs: es el número de componentes espectrales o temporales para realizar la media.
Determina el número máximo de promedios en un promedio Stable, el número de
intervalos Tspan en la constante temporal del promedio exponencial o el número de
franjas para buscar valores máximos en el promedio Peak Hold.
• Avg Type: se puede elegir entre:
− Off: emplea un promedio estable y para.
− Stable: suma un número predeterminado de componentes con el mismo
coeficiente de peso. El promedio es automáticamente normalizado con el
número de componentes existentes.
− Live: produce una medida equivalente al promedio exponencial con el
parámetro Avgs igual a 1.
− Exponential: produce un promedio que continua desde que el botón Start es
pulsado hasta que se pulsa el botón Stop. Los datos se ponderan y la influencia
de imágenes anteriores decaen de forma exponencial con el tiempo.
− Pea kHold: no es realmente un promedio, sino que se toma el valor máximo
encontrado para cada punto de frecuencia.
Figura A.36 Opciones en AvgType
• Overlap: este parámetro acepta entradas para el máximo solapamiento permisible
entre franjas promediadas como un porcentaje de Tspan. Si el valor de overlap es 0, se
calcula un promedio con datos no redundantes. Un valor alto permite que el proceso
de promediado use franjas en tiempo. Esto es muy útil para acelerar el tiempo para
adquirir datos continuamente. Se suele usar un valor de overlap entre 50 y 70% para
obtener espectros de señales continuas.
• Trigger: se puede seleccionar tres opciones:
− Free Run: permite al sistema adquirir datos continuamente sin esperar al trigger.
Esta la opción normal para un análisis tipo spectrum e histogram de señales
continuas.
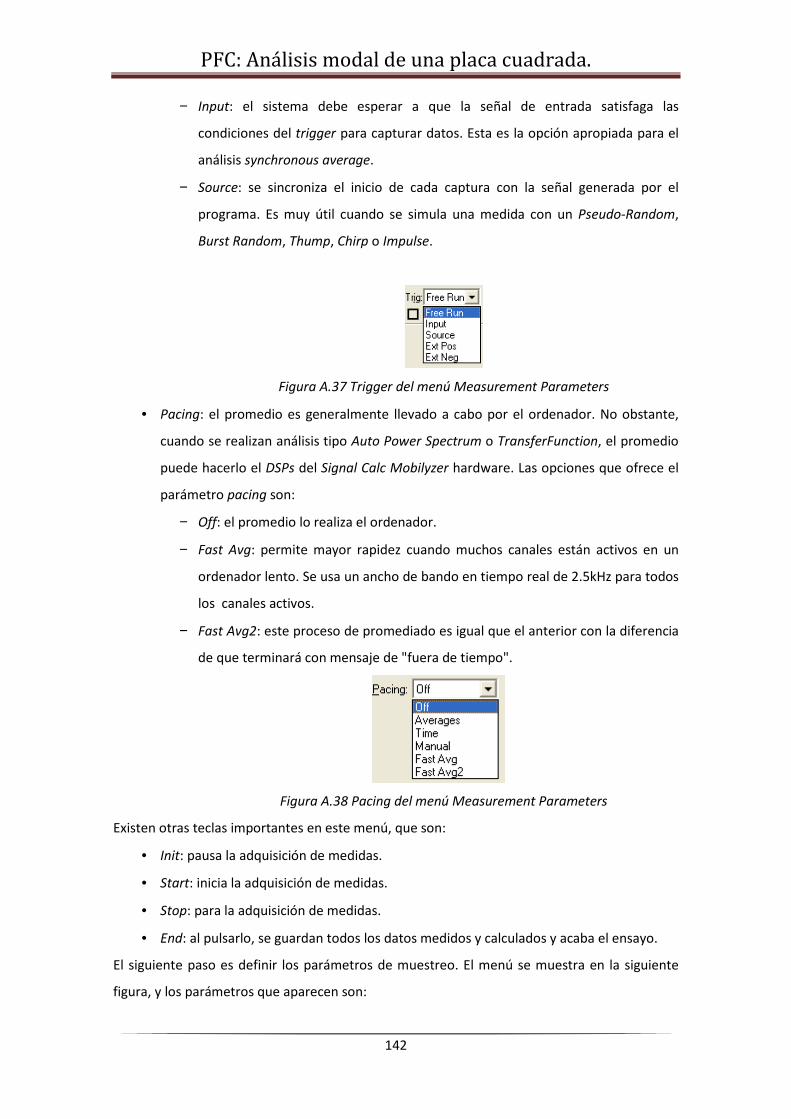
PFC: Análisis modal de una placa cuadrada.
142
− Input: el sistema debe esperar a que la señal de entrada satisfaga las
condiciones del trigger para capturar datos. Esta es la opción apropiada para el
análisis synchronous average.
− Source: se sincroniza el inicio de cada captura con la señal generada por el
programa. Es muy útil cuando se simula una medida con un Pseudo-Random,
Burst Random, Thump, Chirp o Impulse.
Figura A.37 Trigger del menú Measurement Parameters
• Pacing: el promedio es generalmente llevado a cabo por el ordenador. No obstante,
cuando se realizan análisis tipo Auto Power Spectrum o TransferFunction, el promedio
puede hacerlo el DSPs del Signal Calc Mobilyzer hardware. Las opciones que ofrece el
parámetro pacing son:
− Off: el promedio lo realiza el ordenador.
− Fast Avg: permite mayor rapidez cuando muchos canales están activos en un
ordenador lento. Se usa un ancho de bando en tiempo real de 2.5kHz para todos
los canales activos.
− Fast Avg2: este proceso de promediado es igual que el anterior con la diferencia
de que terminará con mensaje de "fuera de tiempo".
Figura A.38 Pacing del menú Measurement Parameters
Existen otras teclas importantes en este menú, que son:
• Init: pausa la adquisición de medidas.
• Start: inicia la adquisición de medidas.
• Stop: para la adquisición de medidas.
• End: al pulsarlo, se guardan todos los datos medidos y calculados y acaba el ensayo.
El siguiente paso es definir los parámetros de muestreo. El menú se muestra en la siguiente
figura, y los parámetros que aparecen son:

PFC: Análisis modal de una placa cuadrada.
143
Figura A.39 Parámetros de muestreo
• F/T: si se selecciona F, el control se realiza en frecuencia y aparecen los parámetros
Fspan y lines. Al seleccionar T, el control es en tiempo y los parámetros son Tspan y
BlockSize.
• Fspan/Tspan:son la frecuencia en Herzios más alta de todo el espectro computado y la
duración en segundos de la ventana capturada respectivamente.
• Lines/BlockSize: número de líneas del ancho de banda y número de muestreos
temporales en cada franja respectivamente.
Si se denomina a la resolución en frecuencia dF y en tiempo dT, la relación entre los
parámetros arriba descritos es:
Tspan=BlockSizexdTFspan=LinesxdF
dF=1/TspanLines=Integral(25*BlockSize/6)
Antes de empezar el ensayo hay que definir los parámetros de los canales en el menú Input. En
primer lugar se definen las entradas en la pestaña Front End.
Figura A.40 Pestaña Front End del menu Input
• Ch#: número del canal.
• Active: se seleccionan los canales activos.
• Coupling: acoplamiento de los acelerómetros. Se puede elegir entre DC, AC e ICP. Para
los ensayos realizados en la mesa de vibraciones de los Laboratorios de Ingeniería
Mecánica de la Universidad de Sevilla, se debe seleccionar la opción ICP, pues es la
tecnología de los acelerómetros usados.
• Range (EU): es el rango de las entradas en las unidades seleccionadas en EU.
• mV/EU: sensibilidad de los acelerómetros.

PFC: Análisis modal de una placa cuadrada.
144
• EU: elección de la unidad utilizada.
En siguiente paso es seleccionar el canal de referencia y la ventana que se le aplica en la
pestaña Measurement.
Figura A.41 Pestaña Measurement del menu Input
• Ref Chan: se debe elegir el canal que registra la fuerza aplicada, es decir, el situado en
la mesa de vibraciones.
• Window: dependiendo de si el canal mide fuerza o respuesta, se debe seleccionar la
opción Force o Response.
El siguiente paso es definir la dirección en la que va a medir cada acelerómetro. Para ello hay
que ir a la pestaña Info. La columna Cur Pt no debe modificarse, y la Pt Inc debe tener siempre
un valor de 0, para que no incremente los puntos de medida y guarde siempre los mismos
datos.
Figura A.42 Pestaña Info del menú Input
Puede ocurrir que las últimas seis columnas de la pestaña anterior estén bloqueadas y no se
pueda cambiar la dirección de medida. Para solucionarlo, habría que abrir el menú Run
Options en la parte izquierda del interfaz del programa y activar la opción de
Point/DirectionOn.

PFC: Análisis modal de una placa cuadrada.
145
Figura A.43 Menú Run Options
También se debe especificar el tipo de excitación que desea aplicar. Esto se realiza en el menú
Generator, donde se debe especificar el tipo de excitación a aplicar y los canales que están
activos durante el ensayo, que deben ser los mismo que los definidos en el menú Input,
pestaña Front End. Se puede elegir entre:
• Chirp: es un barrido senoidal entre dos frecuencias cualesquiera.
• Sine: aplica una excitación senoidal sin control en frecuencia.
• Random: es una excitación aleatoria de tipo ruido.
• Pseudo Random: es similar al random, con la diferencia de que es una señal periódica.
• Impulse: realiza control mediante impulsos.
• Busrt random: es una ráfaga de corta duración del tipo random.
• Thump: aplica una semionda sinusoidal con velocidad y desplazamiento compensado.
Figura A.44 Menú Generator
Por último y antes de empezar el ensayo, se deben seleccionar las gráficas que se quieren
guardar. Esto se realiza en el menú Signal Map, situado en la parte derecha del interfaz, junto
al menú Run Options, como puede verse en la figura C.43. Para seleccionar los datos que se
desean guardar, se debe expandir el menú Allocated Signal, seleccionar lo que se desea
guardar y arrastrarla hasta Export Targets. Los datos se pueden guardar en distintos formatos,
entre los que destacan en archivo de texto y en formato Matlab®.
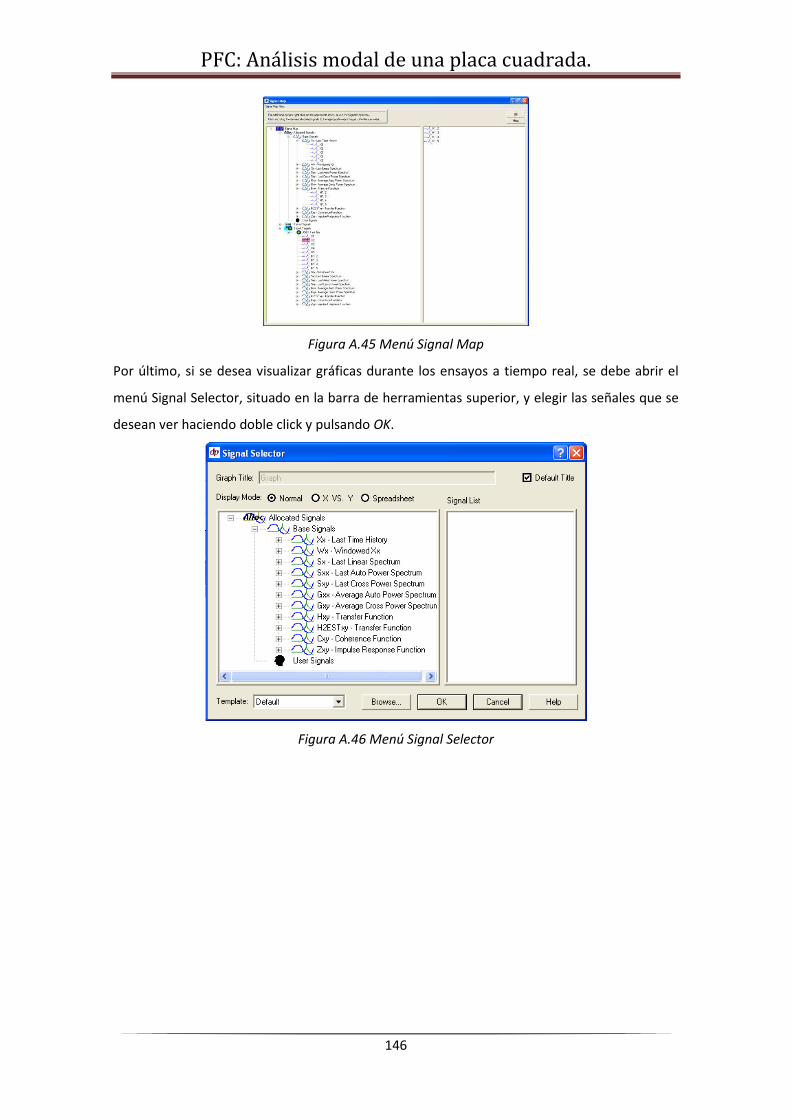
PFC: Análisis modal de una placa cuadrada.
146
Figura A.45 Menú Signal Map
Por último, si se desea visualizar gráficas durante los ensayos a tiempo real, se debe abrir el
menú Signal Selector, situado en la barra de herramientas superior, y elegir las señales que se
desean ver haciendo doble click y pulsando OK.
Figura A.46 Menú Signal Selector

PFC: Análisis modal de una placa cuadrada.
147
ANEXO B.PROGRAMAS DE MATLAB®
B.1. Programa principal usado en el método de Ritz
clear all
close all
clc
symsxy
%Construir el vector km (en otro programa se calcul o el valor de
estos)
km=[];
km(1)=1;
km(2)=1;
for l=3:6
km(l)=((l-1)/2-1/4)*pi;
end
%Calcular los valores de um y un
um0=1/sqrt(2);
um1=sqrt(3/2)*x;
um2=(cosh(km(3))*cos(km(3)*x)+cos(km(3))*cosh(km(3) *x))/sqrt((cosh(km(
3)))^2+(cos(km(3)))^2);
um3=(sinh(km(4))*sin(km(4)*x)+sin(km(4))*sinh(km(4) *x))/sqrt((sinh(km(
4)))^2-(sin(km(4)))^2);
um4=(cosh(km(5))*cos(km(5)*x)+cos(km(5))*cosh(km(5) *x))/sqrt((cosh(km(
5)))^2+(cos(km(5)))^2);
um5=(sinh(km(6))*sin(km(6)*x)+sin(km(6))*sinh(km(6) *x))/sqrt((sinh(km(
6)))^2-(sin(km(6)))^2);
un0=1/sqrt(2);
un1=sqrt(3/2)*y;
un2=(cosh(km(3))*cos(km(3)*y)+cos(km(3))*cosh(km(3) *y))/sqrt((cosh(km(
3)))^2+(cos(km(3)))^2);
un3=(sinh(km(4))*sin(km(4)*y)+sin(km(4))*sinh(km(4) *y))/sqrt((sinh(km(
4)))^2-(sin(km(4)))^2);
un4=(cosh(km(5))*cos(km(5)*y)+cos(km(5))*cosh(km(5) *y))/sqrt((cosh(km(
5)))^2+(cos(km(5)))^2);
un5=(sinh(km(6))*sin(km(6)*y)+sin(km(6))*sinh(km(6) *y))/sqrt((sinh(km(
6)))^2-(sin(km(6)))^2);

PFC: Análisis modal de una placa cuadrada.
148
um=[um0 um1 um2 um3 um4 um5];
un=[un0 un1 un2 un3 un4 un5];
%%%%
mu=0.3;
%%%%
for m=2:2:6
for n=2:2:6
for p=2:2:6
for q=2:2:6
cmnpq1(m,n,p,q)=int(int(diff(diff(um(m)))*un(n)*dif f(diff(um(p)))*un(q
),x,-0.15,0.15),y,-0.15,0.15);
cmnpq2(m,n,p,q)=int(int(um(m)*diff(diff(un(n)))*um( p)*diff(diff(un(q))
),x,-0.15,0.15),y,-0.15,0.15);
cmnpq3(m,n,p,q)=2*mu*int(int(diff(diff(um(m)))*un(n )*um(p)*diff(diff(u
n(q))),-0.15,0.15),y,-0.15,0.15);
cmnpq4(m,n,p,q)=2*(1-
mu)*int(int(diff(um(m))*diff(um(p))*diff(un(n))*dif f(un(q)),x,-
0.15,0.15),y,-0.15,0.15);
end
end
end
end
for m=2:2:6
for n=2:2:6
for p=2:2:6
for q=2:2:6
k(m,n,p,q)=cmnpq1(m,n,p,q)+cmnpq2(m,n,p,q)+cmnpq3(m ,n,p,q)+cmnpq4(m,n,
p,q);
end
end
end
end
K=simplify([k(2,2,2,2) k(2,2,2,4)+k(2,2,4,2) k(2,2, 4,4)
k(2,2,2,6)+k(2,2,6,2) k(2,2,4,6)+k(2,2,6,4) k(2,2,6 ,6);
(k(2,4,2,2)+k(4,2,2,2))/2
(k(2,4,2,4)+k(2,4,4,2)+k(4,2,4,2)+k(4,2,2,4))/2

PFC: Análisis modal de una placa cuadrada.
149
(k(2,4,4,4)+k(4,2,4,4))/2
(k(2,4,2,6)+k(2,4,6,2)+k(4,2,2,6)+k(4,2,6,2))/2
(k(2,4,4,6)+k(2,4,6,4)+k(4,2,4,6)+k(4,2,6,4))/2
(k(2,4,6,6)+k(4,2,6,6))/2;
k(4,4,2,2) k(4,4,2,4)+k(4,4,4,2) k(4,4,4,4) k( 4,4,2,6)+k(4,4,6,2)
k(4,4,4,6)+k(4,4,6,4) k(4,4,6,6);
(k(2,6,2,2)+k(6,2,2,2))/2
(k(2,6,2,4)+k(2,6,4,2)+k(6,2,4,2)+k(6,2,2,4))/2
(k(2,6,4,4)+k(6,2,4,4))/2
(k(2,6,2,6)+k(2,6,6,2)+k(6,2,2,6)+k(6,2,6,2))/2
(k(2,6,4,6)+k(2,6,6,4)+k(6,2,4,6)+k(6,2,6,4))/2
(k(2,6,6,6)+k(6,2,6,6))/2;
(k(4,6,2,2)+k(6,4,2,2))/2
(k(6,4,2,4)+k(6,4,4,2)+k(4,6,4,2)+k(4,6,2,4))/2
(k(4,6,4,4)+k(6,4,4,4))/2
(k(4,6,2,6)+k(4,6,6,2)+k(6,4,2,6)+k(6,4,6,2))/2
(k(4,6,4,6)+k(4,6,6,4)+k(6,4,4,6)+k(6,4,6,4))/2
(k(4,6,6,6)+k(6,4,6,6))/2;
k(6,6,2,2) k(6,6,2,4)+k(6,6,4,2) k(6,6,4,4) k( 6,6,2,6)+k(6,6,6,2)
k(6,6,4,6)+k(6,6,6,4) k(6,6,6,6)]);
I=sqrt(-1);
%Primer autovalor
Kr1=K(2:end,2:end);
Kd1=diag(Kr1);
K01=Kr1-diag(Kd1);
la1=K(1,1);
a1=zeros(1,size(K,2));
a1(1)=1;
for j=1:6
b1=-K(2:end,1);
b1j=b1-K01*a1(2:end)';
a1(2:6)=b1j./(Kd1-la1);
la1=K(1,1)+K(1,2:end)*a1(2:6)';
end
la1
%Segundo autovalor
Kr2=[K(1,1) K(1,3) K(1,4) K(1,5) K(1,6)
K(3,1) K(3,3) K(3,4) K(3,5) K(3,6)
PFC: Análisis modal de una placa cuadrada.
150
K(4,1) K(4,3) K(4,4) K(4,5) K(4,6)
K(5,1) K(5,3) K(5,4) K(5,5) K(5,6)
K(6,1) K(6,3) K(6,4) K(6,5) K(6,6)];
Kd2=diag(Kr2);
K02=Kr2-diag(Kd2);
la2=K(2,2);
a2=zeros(1,6);
a2(2)=1;
aa2=[a2(1) a2(3) a2(4) a2(5) a2(6)]';
Ka2=[K(2,1) K(2,3) K(2,4) K(2,5) K(2,6)];
Kb2=[K(1,2); K(3,2); K(4,2); K(5,2); K(6,2)];
for j=1:6
b2=-Kb2;
b2j=b2-K02*aa2;
aa2=b2j./(Kd2-la2);
la2=K(2,2)+Ka2*aa2;
end
la2
%Tercer autovalor
Kr3=[K(1,1) K(1,2) K(1,4) K(1,5) K(1,6);
K(2,1) K(2,2) K(2,4) K(2,5) K(2,6);
K(4,1) K(4,2) K(4,4) K(4,5) K(4,6);
K(5,1) K(5,2) K(5,4) K(5,5) K(5,6);
K(6,1) K(6,2) K(6,4) K(6,5) K(6,6)];
Kd3=diag(Kr3);
K03=Kr3-diag(Kd3);
la3=K(3,3);
a3=zeros(1,size(K,2));
a3(3)=1;
aa3=[a2(1) a2(2) a2(4) a2(5) a2(6)]';
Ka3=[K(3,1) K(3,2) K(3,4) K(3,5) K(3,6)];
Kb3=[K(1,3); K(2,3); K(4,3); K(5,3); K(6,3)];
for j=1:6
b3=-Kb3;
bj3=b3-K03*aa3;
aa3=bj3./(Kd3-la3);
la3=K(3,3)+Ka3*aa3;
end
la3
%Cuarto autovalor
Kr4=[K(1,1) K(1,2) K(1,3) K(1,5) K(1,6);

PFC: Análisis modal de una placa cuadrada.
151
K(2,1) K(2,2) K(2,3) K(2,5) K(2,6);
K(3,1) K(3,2) K(3,3) K(3,5) K(3,6);
K(5,1) K(5,2) K(5,3) K(5,5) K(5,6);
K(6,1) K(6,2) K(6,3) K(6,5) K(6,6)];
Kd4=diag(Kr4);
K04=Kr4-diag(Kd4);
la4=K(4,4);
a4=zeros(1,size(K,2));
a4(4)=1;
aa4=[a2(1) a2(2) a2(3) a2(5) a2(6)]';
Ka4=[K(4,1) K(4,2) K(4,2) K(4,5) K(4,6)];
Kb4=[K(1,4); K(3,4); K(3,4); K(5,4); K(6,4)];
for j=1:6
b4=-Kb4;
bj4=b4-K04*aa4;
aa4=bj4./(Kd4-la4);
la4=K(4,4)+Ka4*aa4;
end
la4
%Quinto autovalor
Kr5=[K(1,1) K(1,2) K(1,3) K(1,4) K(1,6);
K(2,1) K(2,2) K(2,3) K(2,4) K(2,6);
K(3,1) K(3,2) K(3,3) K(3,4) K(3,6);
K(4,1) K(4,2) K(4,3) K(4,4) K(4,6);
K(6,1) K(6,2) K(6,3) K(6,4) K(6,6)];
Kd5=diag(Kr5);
K05=Kr5-diag(Kd5);
la5=K(5,5);
a5=zeros(1,size(K,2));
a5(5)=1;
aa5=[a5(1) a5(2) a5(3) a5(4) a5(6)]';
Ka5=[K(5,1) K(5,2) K(5,3) K(5,4) K(5,6)];
Kb5=[K(1,5); K(2,5); K(3,5); K(4,5); K(6,5)];
for j=1:6
b5=-Kb5;
bj5=b5-K05*aa5;
aa5=bj5./(Kd5-la5);
la5=K(5,5)+Ka5*aa5;
end
la5

PFC: Análisis modal de una placa cuadrada.
152
%Sexto autovalor
Kr6=[K(1,1) K(1,2) K(1,3) K(1,4) K(1,5);
K(2,1) K(2,2) K(2,3) K(2,4) K(2,5);
K(3,1) K(3,2) K(3,3) K(3,4) K(3,5);
K(4,1) K(4,2) K(4,3) K(4,4) K(4,5);
K(5,1) K(5,2) K(5,3) K(5,4) K(5,5)];
Kd6=diag(Kr6);
K06=Kr6-diag(Kd6);
la6=K(6,6);
a6=zeros(1,size(K,2));
a6(6)=1;
aa6=[a6(1) a6(2) a6(3) a6(4) a6(5)]';
Ka6=[K(6,1) K(6,2) K(6,3) K(6,4) K(6,5)];
Kb6=[K(1,6); K(2,6); K(3,6); K(4,6); K(5,6)];
for j=1:6
b6=-Kb6;
bj6=b6-K06*aa6;
aa6=bj6./(Kd6-la6);
la6=K(6,6)+Ka6*aa6;
end
la6
B.2. Funciones auxiliares usadas en el método de Ritz
B.2.1. Función km, m par
function f=ec_m_par(x)
f=tan(x)+tanh(x);
B.2.2. Función km, m impar
function f=ec_m_impar(x)
f=tan(x)-tanh(x);
B.3. Funciones auxiliares usadas en la formulación
acústica
resolution=80; Lx=0.3; Ly=0.3;
PFC: Análisis modal de una placa cuadrada.
153
x=linspace(0,Lx,resolution); y=linspace(0,Ly,resolution); [X,Y]=meshgrid(x,y); %Modo 2 n2=0; m2=2; p2=n2; q2=m2; A2=1; B2=1; %Modo 3 n3=1; m3=1; p3=n3; q3=m3; A3=1; B3=1; %Modo 4 n4=2; m4=0; p4=n4; q4=m4; A4=1; B4=-1; u2=A2.*cos((m2*pi/Lx).*X).*cos((n2*pi/Ly).*Y)+B2.*c os((p2*pi/Lx).*X).*cos((q2*pi/Ly).*Y); u3=A3.*cos((m3*pi/Lx).*X).*cos((n3*pi/Ly).*Y)+B3.*c os((p3*pi/Lx).*X).*cos((q3*pi/Ly).*Y); u4=A4.*cos((m4*pi/Lx).*X).*cos((n4*pi/Ly).*Y)+B4.*c os((p4*pi/Lx).*X).*cos((q4*pi/Ly).*Y); patterncmap=[0 0 0.5625; 0 0 0.5962; 0 0 0.6298; 0 0 0.6635; 0 0 0.6971; 0 0 0.7308; 0 0 0.7644; 0 0 0.7981; 0 0 0.8 317; 0 0 0.8654; 0 0 0.8990; 0 0 0.9327; 0 0 0.9663; 0 0 1; 0 0.0667 1; 0 0. 1333 1; 0 0.2 1; 0 0.2667 1; 0 0.3333 1; 0 0.4 1; 0 0.4667 1; 0 0.5333 1; 0 0.6 1; 0 0.6667 1; 0 0.7333 1; 0 0.8 1; 0 0.8667 1; 0 0.9333 1; 0 1 1; 0 0.75 0.75; 0 0.5 0.5; 0 0.25 0.25; 0 0 0; 0.25 0.25 0; 0.5 0.5 0 ; 0.75 0.75 0; 1 1 0; 1 0.9286 0; 1 0.8571 0; 1 0.7857 0; 1 0.7143 0; 1 0.6429 0; 1 0.5714 0; 1 0.5 0; 1 0.4286 0; 1 0.3571 0; 1 0.2857 0; 1 0.2143 0; 1 0.1429 0; 1 0.0714 0; 1 0 0; 0.9615 0 0; 0.9231 0 0; 0.88 46 0 0; 0.8462 0 0; 0.8077 0 0; 0.7692 0 0; 0.7308 0 0; 0.6923 0 0; 0.6 538 0 0; 0.6154 0 0; 0.5769 0 0; 0.5385 0 0;0.5 0 0;]; set(figure, 'Colormap' ,patterncmap) surf(X,Y,-u2) view([0 0 0.3]) set(figure, 'Colormap' ,patterncmap) surf(X,Y,-u3) view([0 0 0.3]) set(figure, 'Colormap' ,patterncmap) surf(X,Y,-u4) view([0 0 0.3])

PFC: Análisis modal de una placa cuadrada.
154
REFERENCIAS
[1] Avitabile, P., January 2001. Experimental modal analysis.A simple non-mathematical
presentation.Sound and vibration.
[2] http://es.wikipedia.org/wiki/Puente_de_Tacoma_Narrows
[3] Heylen, W., Lammens, S., Sas, P., Modal Analysis Theory and Testing,
KatholiekeUniversiteit Leuven.
[4]Moretti, V., Spectral Theory and Quantum Mechanics , with an Introduction to the algebraic
formulation, Unitext, Volume 64, Springer, 2010.
[5] http://ocw.uc3m.es/mecanica-de-medios-continuos-y-teoria-de-
estructuras/elasticidad_resistencia_materialesi/ejercicios/CAPITULO_6_(Teoremas_energetico
s).pdf
[6] Rodríguez Súnico, M.,Proyecto fin de carrera: Análisis modal operacional: teoría y
práctica,Universidad de Sevilla, 2005.
[7] Ginsberg, J.H., Mechanical and structural vibrations.Theory and applications, First edition,,
Georgia Institute of Technology.
[8] Apuntes de la asignatura Ampliación de Cinemática y Dinámica deMáquinas, 2011
[9] Lama Ponce, M., Proyecto fin de carrera: Análisis modal teórico y experimental de sistemas
dinámico, Universidad de Sevilla, 2008.
[10] Schwarz, B.J., Richardson, M.H., October 1999. Experimental modal analysis.CSIReliability
Week, Orlando, FL.
[11] Avitabile, P., January 2001. Experimental modal analysis.A simple non-mathematical
presentation.Sound and vibration.
[12] Nor HatiniBintiBaharin, Effect od accelerometer mass on thin plate vibration. Faculty of
Mechanical ENgineering, UniversitiTeknologi Malaysia, 2008
[13] Plate Theory, Technical University od Denmark, Department of Mechanical Engineering,
2002
[14] Timoshenko, S., Teoría de placas y láminas, Urmo, 1970
PFC: Análisis modal de una placa cuadrada.
155
[15] París Carballo, F., Teoría de la elasticidad, Grupo de Elasticidad y Resistencia de
Materiales, 3ªed, 2005
[16] http://www.slideshare.net/balrock/principio-de-la-conservacion-de-la-energia
[17] http://www.efn.unc.edu.ar/departamentos/estruct/mec2_ic/placas.pdf
[18] http://mit.ocw.universia.net/16.21/NR/rdonlyres/Aeronautics-and-Astronautics/16-
21Techniques-of-Structural-Analysis-and-DesignSpring2003/8B0F84B6-9B7B-46CF-9DFF-
6F04EA1DA21A/0/notes10.pdf
[19] García Blancas, P., Proyecto fin de carrera: Implementación de prácticas de dinámica
estructural en el laboratorio, Universidad de Sevilla, 2011
[20] Santander, M., Introducción al cálculo variacional, Departamento de Física Teórica,
Universidad de Valladolid, 2003
[21] Kirk, C.L.,A note on the lowest natural frequency of a square plate point-supported at the
corners. J.Roy. Aeron Soc, vol. 66, no. 616, Abril 1962, pp. 240-241
[22] Xiao, W., Chladni Pattern, Basic studies in natural sciences, RUC, 2010
[23] Reed, R.E.Jr., Comparison of methods in calculating frequencies of corner-supported
rectangular plates, National Aeronautics and Space Administration (NASA), 1965
[24] Cox, H.L., and Boxer, J.,Vibration of rectangular plates point-supported at the corners.
Aeron.Quart., vol. 11, no. 1, Feb. 1960, pp. 41-50
[25] Nishimura, T., Studies on vibration problems of flat plates by means of difference calculus,
Proc. 3d Jap. Ntl. Congr. Appl. Mech, 1953
[26] Blevins, R.D.,Formulas for natural frequency and mode shape, Krieger Publishing
Company, Malabar, Florida, 1995
[27] Métodos numéricos para ingeniería, Ricardo Seminario Vasquez, Dto Ingeniería de
Sistemas e Industrial, Universidad nacional de Colombia (apuntes)
[28] Carnahan, B., Luther, H. A., Wilkes, J.G., Applied numerical methods. Robert E. Krieger
Publishing Company, 1990

PFC: Análisis modal de una placa cuadrada.
156
[29] Burden, R.L., Faires, J.D., AnálisisNumérico. Grupo Editorial Iberoamerica, 1985
[30] Bathe, K.J., Finite element prodecures. Prentice Hall, 1996
[31] http://www.iit.upcomillas.es/~carnicero/Resistencia/Introduccion_al_MEF.pdf
[32] CeligüetaLizarza, J. T., Método de los elementos finitos para análisis estructural.
Universidad de Navarra, 2011
[33] Ariza Moreno, P., Sáez Pérez, A., Método de los elementos finitos: introducción a Ansys,
Universidad de Sevilla, 2004
[34] http://es.wikipedia.org/wiki/Teor%C3%ADa_de_placas_y_l%C3%A1minas
[35]Cano Calderón, A., Proyecto fin de carrera , Universidad de Sevilla, 2012
[36] http://www.sinais.es/Recursos/Curso-
vibraciones/sensores/transductores_piezoelectricos.html
[37] http://es.wikipedia.org/wiki/Aliasing
[38] http://www.ccs.fau.edu/~bressler/EDU/NSP/Modules/XIII.pdf
[39]http://dynsys.uml.edu/tutorials/Windowling_and_leakage/Windows%20and%20Leakage%
20Overview.pdf
[40] Apuntes de la asignatura Análisis Experimental de Estructuras, Universidad de Sevilla,
2012
[41] http://rubenbr.netfirms.com/equaphonuniversity/?p=4816

















