Control Automático Página 1 UTVM Universidad Tecnológica del Valle del mezquital Programa educativo; Mecatrónica Cuatrimestre; 9 “A” Asignatura; Control automático Unidad temática; Representación y modelación de sistemas físicos Nombre de la práctica; Modelo matemático y representación físico de un circuito RC Nombre de alumnos; Evaristo Hernández Martínez Marco Antonio Retana Doroteo Catedrático; Huber Trejo
Transcript
Control Automático Página 1
UTVM
Universidad Tecnológica
del Valle del mezquital
Programa educativo;
Mecatrónica
Cuatrimestre;
9 “A”
Asignatura;
Control automático
Unidad temática;
Representación y modelación de sistemas físicos
Nombre de la práctica;
Modelo matemático y representación físico de un circuito RC
Nombre de alumnos;
Evaristo Hernández Martínez Marco Antonio Retana Doroteo
Catedrático;
Huber Trejo
Control Automático Página 2
Índice Página
1. Objetivo ..………………………………………….……..…... 3
2. Materiales .…………………………….………………....….. 3
3. Desarrollo .…………………………………………………… 3
3.1. Modelado matemático de circuito RC en el tiempo .… 4
3.2. Modelado matemático de circuito RC en Laplace …... 6
3.3. Programación en Matlab ……………………………... 9
3.4. Simulación de circuito RC en software Proteus ….... 11
3.5. Representación de circuito RC en tiempo real …….. 12
4. Conclusión .………………………………………………… 13
Control Automático Página 3
1. Objetivo
Realizar un modelo matemático de un circuito RC junto con un generador de
funciones, simularlo y poder representarlo en forma real.
2. Material
1. Generador de funciones
2. Capacitor con un valor de faradios
3. Dos resistencias de 10K ohms
4. Un push button N/A
5. Fuente de voltaje
6. Osciloscopio
7. Software
1. Matlab
2. Proteus
3. Desarrollo
En esta práctica se desarrolla el modelado matemático en el tiempo y en Laplace
de un circuito RC el cual proseguirá la programación de modelado matemático en
Matlab, simulación en el software Proteus y la representación física del circuito.
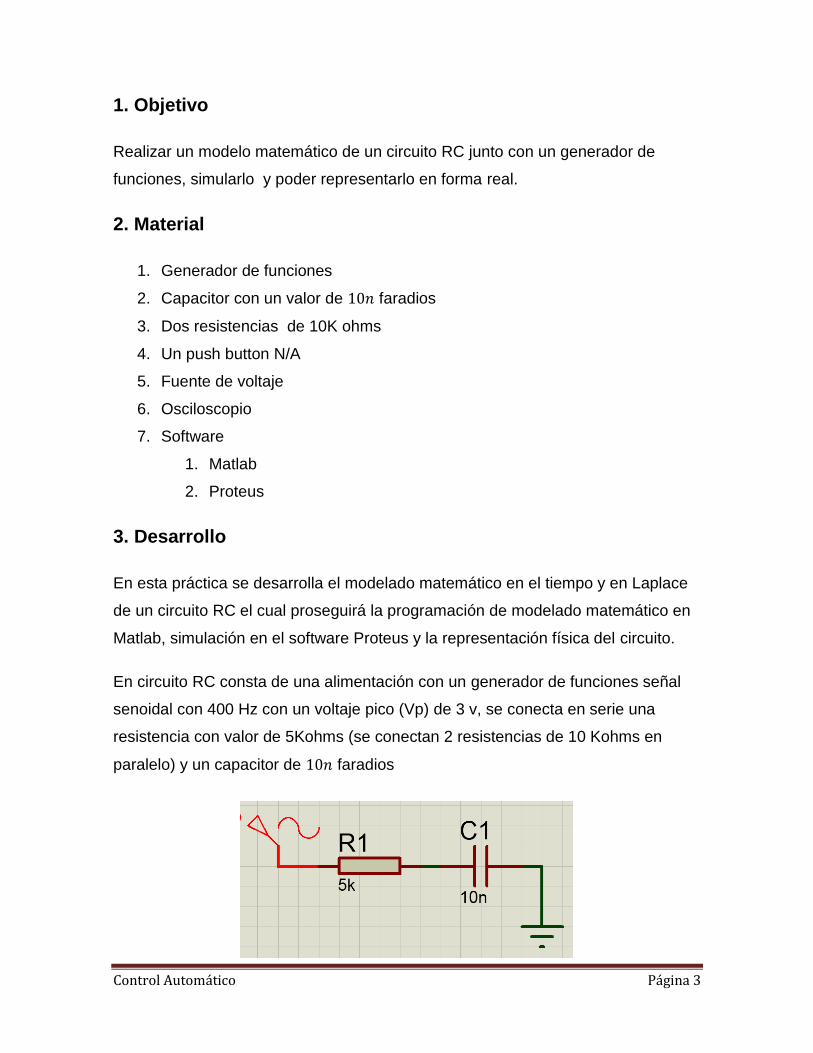
En circuito RC consta de una alimentación con un generador de funciones señal
senoidal con 400 Hz con un voltaje pico (Vp) de 3 v, se conecta en serie una
resistencia con valor de 5Kohms (se conectan 2 resistencias de 10 Kohms en
paralelo) y un capacitor de faradios
Control Automático Página 4
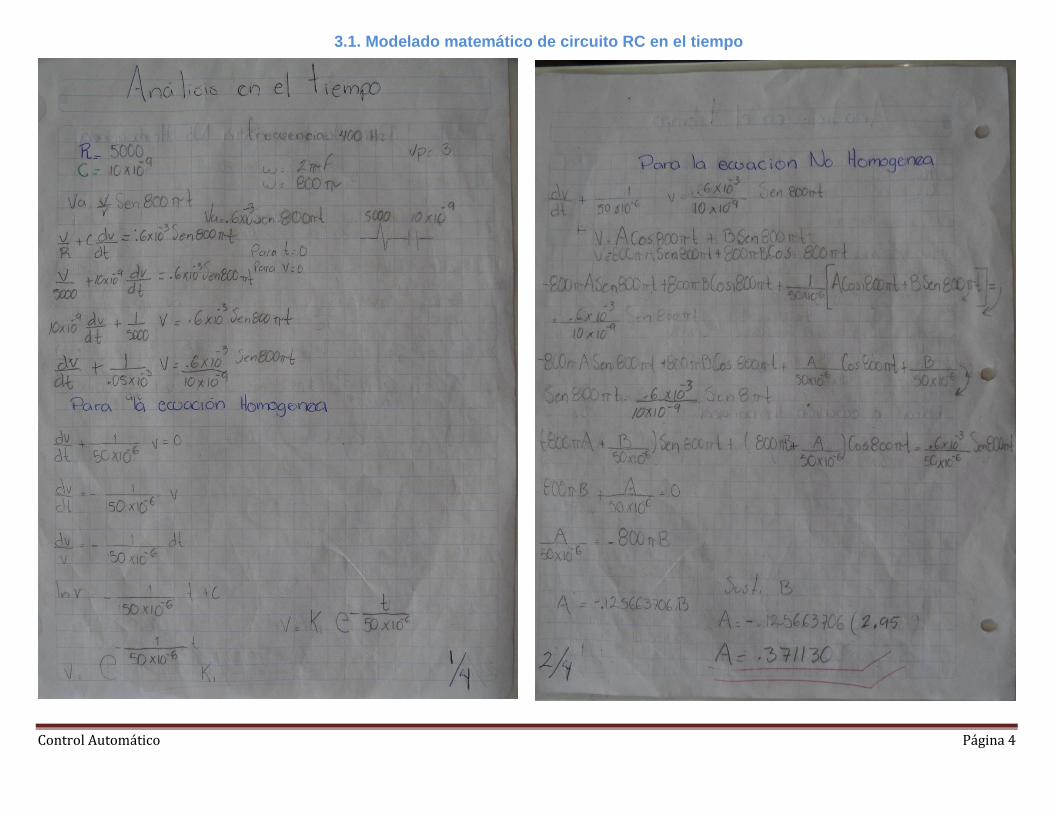
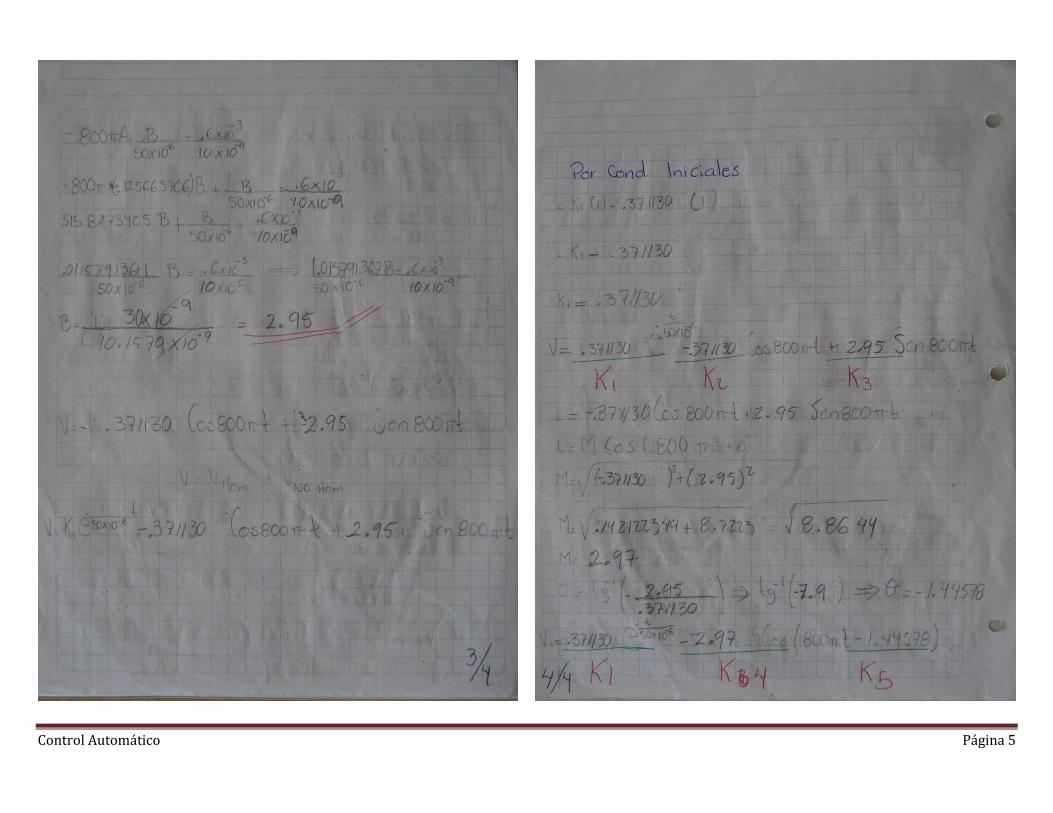
3.1. Modelado matemático de circuito RC en el tiempo
Control Automático Página 5
Control Automático Página 6
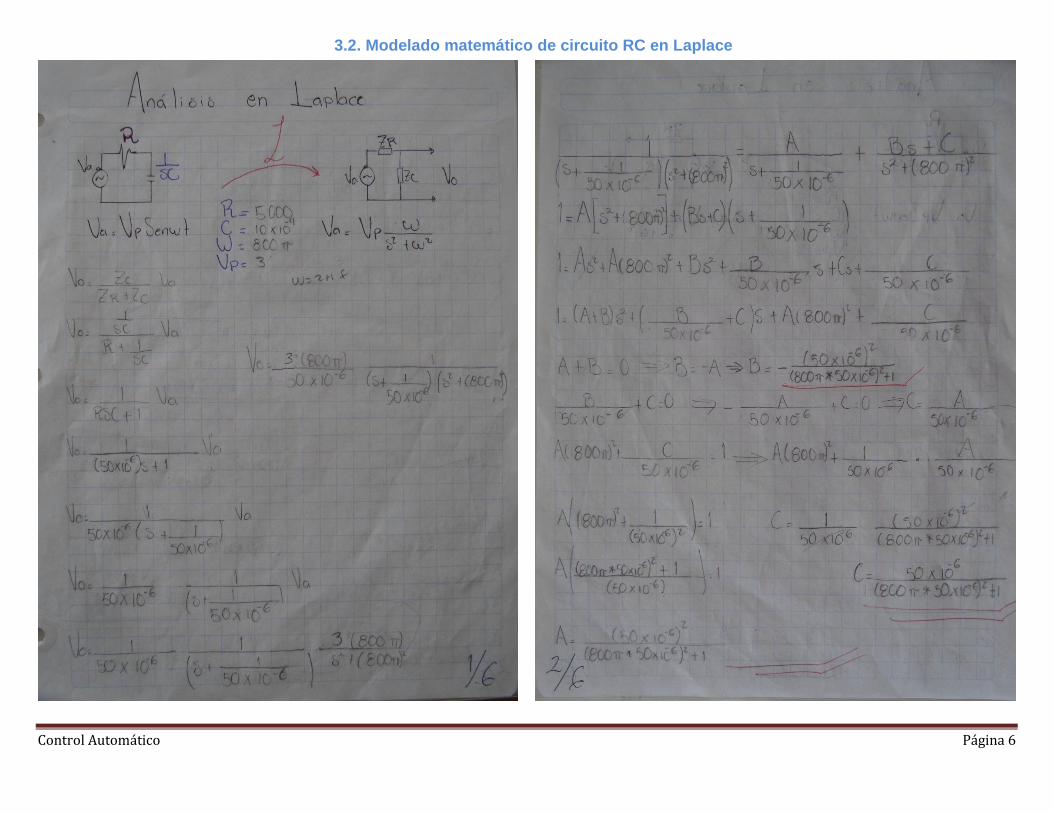
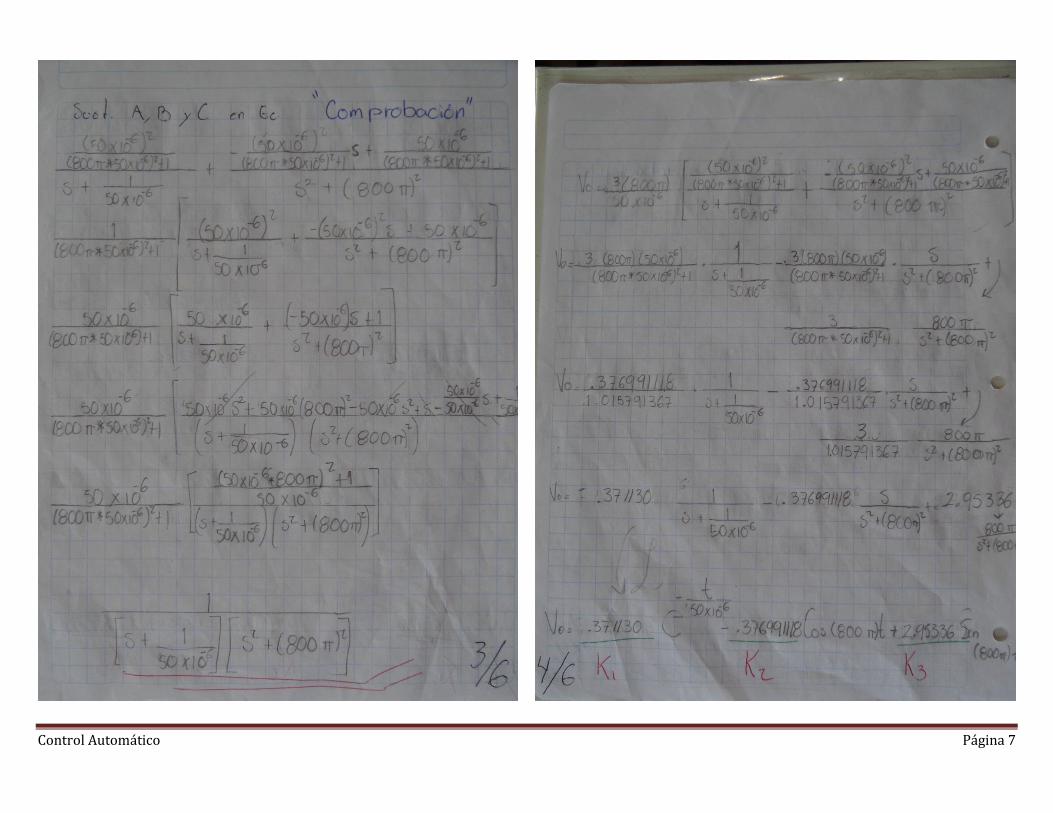
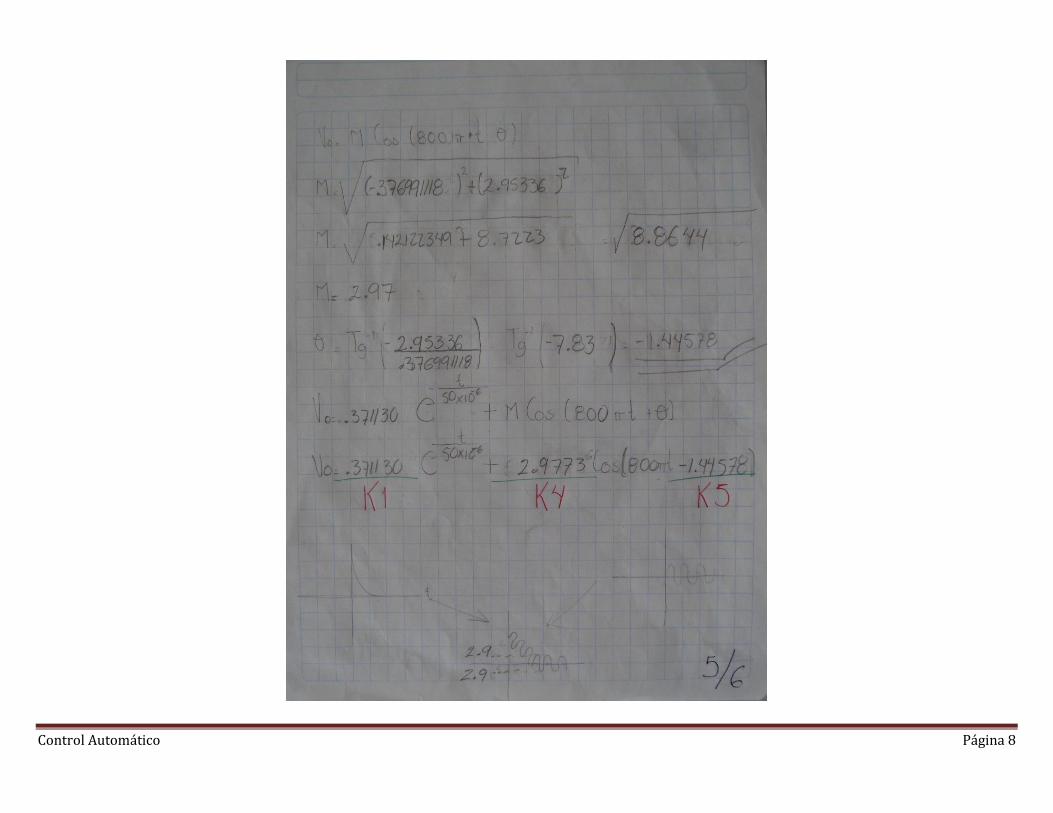
3.2. Modelado matemático de circuito RC en Laplace
Control Automático Página 7
Control Automático Página 8
Control Automático Página 9
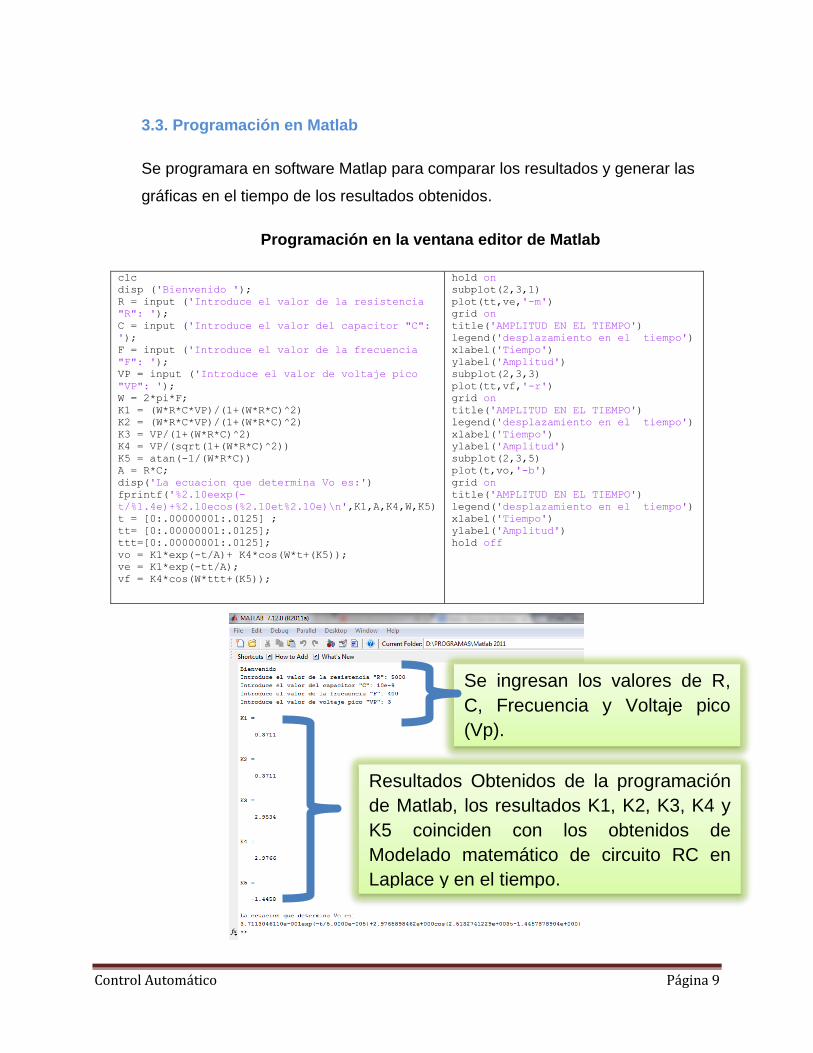
3.3. Programación en Matlab
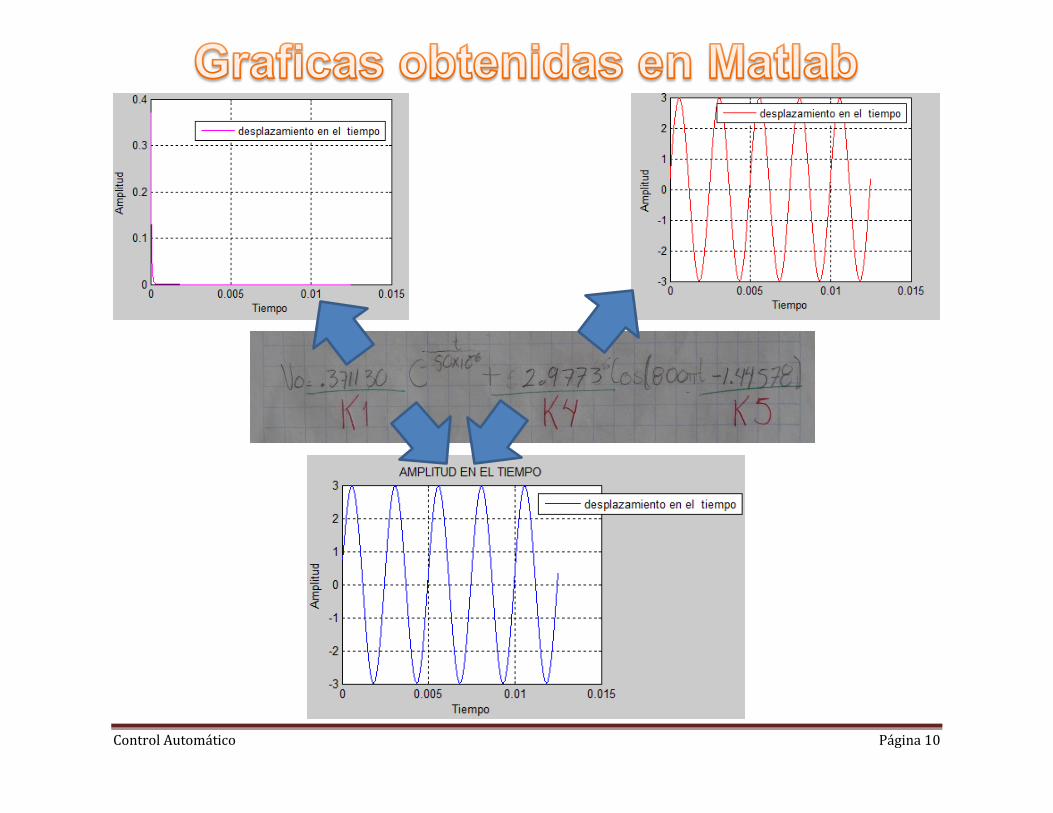
Se programara en software Matlap para comparar los resultados y generar las
gráficas en el tiempo de los resultados obtenidos.
Programación en la ventana editor de Matlab
clc disp ('Bienvenido '); R = input ('Introduce el valor de la resistencia
"R": '); C = input ('Introduce el valor del capacitor "C":
'); F = input ('Introduce el valor de la frecuencia
"F": '); VP = input ('Introduce el valor de voltaje pico
"VP": '); W = 2*pi*F; K1 = (W*R*C*VP)/(1+(W*R*C)^2) K2 = (W*R*C*VP)/(1+(W*R*C)^2) K3 = VP/(1+(W*R*C)^2) K4 = VP/(sqrt(1+(W*R*C)^2)) K5 = atan(-1/(W*R*C)) A = R*C; disp('La ecuacion que determina Vo es:') fprintf('%2.10eexp(-
t/%1.4e)+%2.10ecos(%2.10et%2.10e)\n',K1,A,K4,W,K5) t = [0:.00000001:.0125] ; tt= [0:.00000001:.0125]; ttt=[0:.00000001:.0125]; vo = K1*exp(-t/A)+ K4*cos(W*t+(K5)); ve = K1*exp(-tt/A); vf = K4*cos(W*ttt+(K5));
hold on subplot(2,3,1) plot(tt,ve,'-m') grid on title('AMPLITUD EN EL TIEMPO') legend('desplazamiento en el tiempo') xlabel('Tiempo') ylabel('Amplitud') subplot(2,3,3) plot(tt,vf,'-r') grid on title('AMPLITUD EN EL TIEMPO') legend('desplazamiento en el tiempo') xlabel('Tiempo') ylabel('Amplitud') subplot(2,3,5) plot(t,vo,'-b') grid on title('AMPLITUD EN EL TIEMPO') legend('desplazamiento en el tiempo') xlabel('Tiempo') ylabel('Amplitud') hold off
Resultados Obtenidos de la programación
de Matlab, los resultados K1, K2, K3, K4 y
K5 coinciden con los obtenidos de
Modelado matemático de circuito RC en
Laplace y en el tiempo.
Se ingresan los valores de R,
C, Frecuencia y Voltaje pico
(Vp).
Control Automático Página 10
Control Automático Página 11
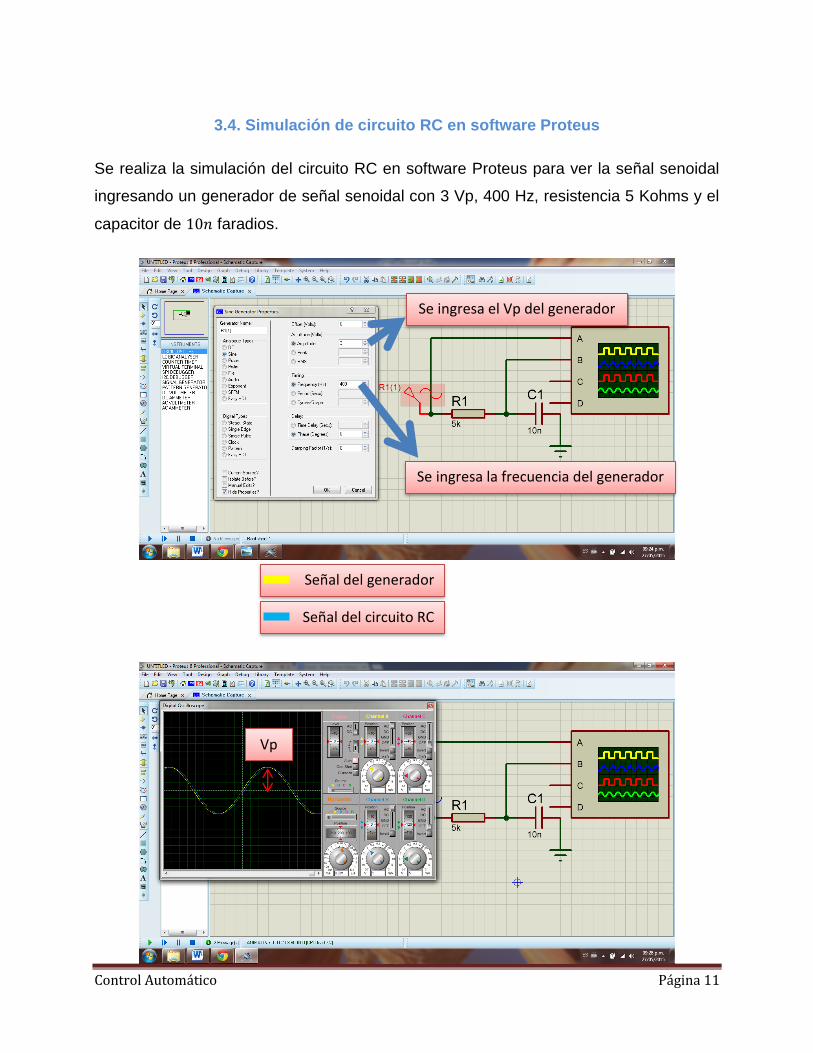
3.4. Simulación de circuito RC en software Proteus
Se realiza la simulación del circuito RC en software Proteus para ver la señal senoidal
ingresando un generador de señal senoidal con 3 Vp, 400 Hz, resistencia 5 Kohms y el
capacitor de faradios.
Se ingresa el Vp del generador
Se ingresa la frecuencia del generador
Señal del generador
Señal del circuito RC
Vp
Control Automático Página 12
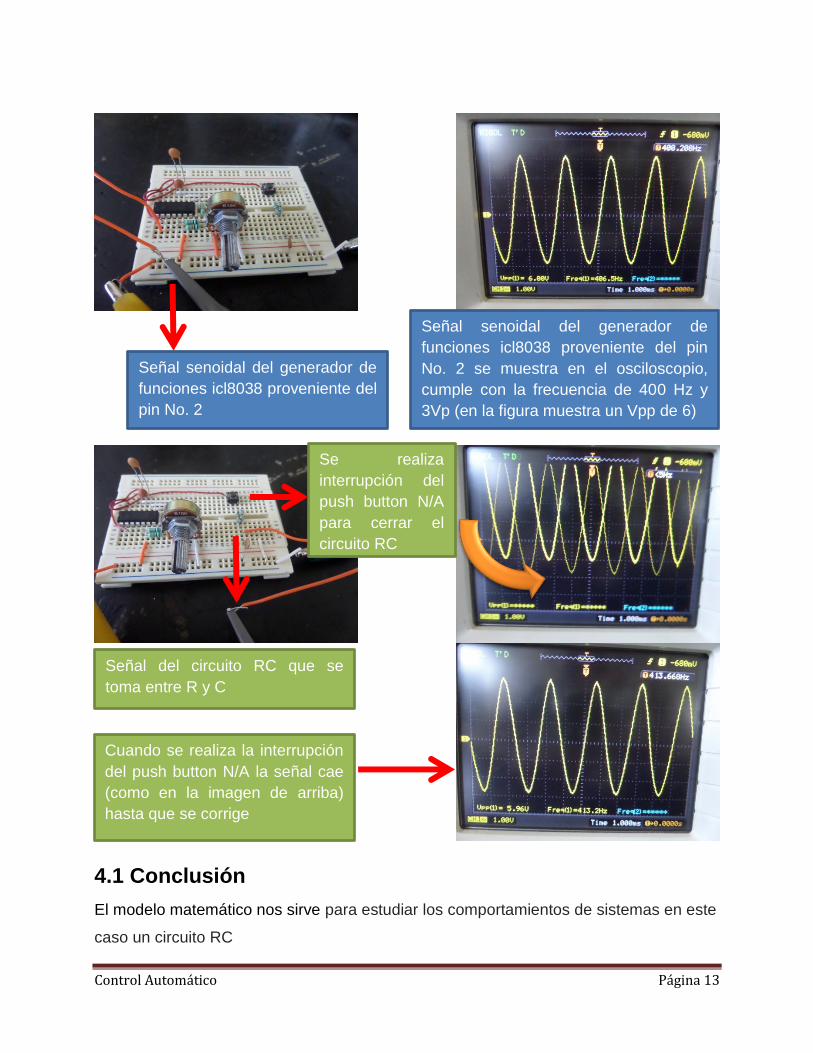
3.5. Representación de circuito RC en tiempo real
Con el modelado matemático, la simulación del circuito RC se prosigue a realizarlo en
vida real.
Fuente de voltaje para el generador de funciones (icl8038) para generar 400 Hz y 3 Vp
Generador
de
funciones
Circuito
RC
Control Automático Página 13
4.1 Conclusión
El modelo matemático nos sirve para estudiar los comportamientos de sistemas en este