Page 1
UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FISICAS Y MATEMATICAS
DEPARTAMENTO DE INGENIERIA INDUSTRIAL
RIESGO MORAL Y SELECCION ADVERSA:
INFORMACION PRIVADA SOBRE LA
PRODUCTIVIDAD Y EL MONITOREO
TESIS PARA OPTAR AL GRADO DE MAGISTER EN ECONOMIA APLICADA
MEMORIA PARA OPTAR AL TITULO DE INGENIERO CIVIL INDUSTRIAL
CARLOS PULGAR ARATA
Santiago de Chile
DICIEMBRE 2011
Page 2
UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FISICAS Y MATEMATICAS
DEPARTAMENTO DE INGENIERIA INDUSTRIAL
RIESGO MORAL Y SELECCION ADVERSA:
INFORMACION PRIVADA SOBRE LA
PRODUCTIVIDAD Y EL MONITOREO
TESIS PARA OPTAR AL GRADO DE MAGISTER EN ECONOMIA APLICADA
MEMORIA PARA OPTAR AL TITULO DE INGENIERO CIVIL INDUSTRIAL
CARLOS PULGAR ARATA
PROFESOR GUIA
JUAN ESCOBAR CASTRO
MIEMBROS DE LA COMISION
FELIPE BALMACEDA MAHNSNICOLAS FIGUEROA GONZALEZ
FELIPE ZURITA LILLO
SANTIAGO DE CHILEDICIEMBRE 2011
Page 3
RESUMEN
Riesgo Moral y Seleccion Adversa:
Informacion Privada sobre la Productividad y el Monitoreo
Se estudia un modelo de agente-principal en que el agente realiza un esfuerzo no observable y
posee informacion privada sobre la tecnologıa de monitoreo. Realizar esfuerzo es costoso para el
agente, pero a la vez tal esfuerzo produce beneficios monetarios al principal. Tanto el esfuerzo
no observable como la informacion privada del agente determinan la distribucion de una senal
publica verificable. El principal disena un menu de contratos de modo tal de maximizar su pago
esperado tomando en cuenta los problemas de incentivos en la relacion contractual.
El primer resultado adopta tecnicas de diseno de mecanismos (Myerson 1981) para caracteri-
zar la familia de contratos implementables. Los pagos contingentes al resultado del monitoreo,
quedan completamente determinados a partir de la funcion de esfuerzo que el principal propone
al agente. Se muestra que un contrato es implementable si y solo si el perfil de esfuerzos aso-
ciado es diferenciable casi en todas partes y su derivada es mayor o igual a una funcion lineal
de la complementariedad en el monitoreo. Esta condicion, que se le llama restriccion de doble
desviacion, captura la posibilidad que tiene el agente de decidir un esfuerzo optimo contingente
a cualquier contrato ofrecido en el menu. Una implicancia de este resultado es que un perfil de
esfuerzos implementable es estrictamente creciente en el tipo del agente y ası, contratos pooling
no pueden implementarse. Al contrario de Myerson (1981) donde la restriccion que surge de
la implementacion no es activa, la doble desviacion tiene fuertes implicancias en el diseno del
menu de contratos optimos, pues genera distorsiones no triviales.
Con la caracterizacion anterior, se plantea el problema del principal como un problema de
control optimo. Usando tecnicas de estatica comparativa robusta, se muestra como se pueden
derivar propiedades de manera simple e intuitiva. Se plantea ademas las condiciones necesarias
de Pontryagin para caracterizar las soluciones del problema del principal. Se ilustra como la
combinacion de riesgo moral y seleccion adversa determinan la forma de los menus de contratos
optimos y causan ineficiencias considerando un simple modelo, en el que la senal sobre la que se
contrata no es directamente productiva, sino que es monitoreo puro. En este contexto, si bien el
esfuerzo o el tipo no es verificable, el principal puede alcanzar el primer mejor usando contratos
de incentivos. Es decir, cuando hay solo seleccion adversa o solo riesgo moral, la asimetrıa de
informacion no tiene costos para el principal. Es precisamente bajo la presencia de selecciona
adversa y riesgo moral cuando las asimetrıas de informacion son costosas para el principal.
En efecto, cualquier perfil de esfuerzos implementable debe ser estrictamente creciente y, en
consecuencia, el primer mejor no se puede alcanzar. El principal distorsiona el esfuerzo de los
tipos bajos a la baja, y el de los tipos altos a la alza de modo de minimizar el costo de la
informacion asimetrica. Notablemente, los menus de transferencias de utilidad ofrecidos por el
principal son constantes en el tipo.
Page 4
Indice general
1. Revision Bibliografica 1
1.1. Literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Modelo discreto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1. Contratos Optimos con solo Riesgo Moral . . . . . . . . . . . . . . 4
1.2.2. Contratos Optimos con solo Seleccion Adversa . . . . . . . . . . . . 4
1.2.3. Contratos Optimos con Seleccion Adversa y Riesgo Moral . . . . . . 5
2. Introduccion 7
3. Modelo 10
3.1. Juego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.1. Pagos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.2. Esquema del juego . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2. Supuestos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4. Benchmark 15
4.1. Primer mejor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2. Riesgo Moral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
I
Page 5
INDICE GENERAL II
4.2.1. Implementacion del Contrato . . . . . . . . . . . . . . . . . . . . . 16
4.2.2. Solucion del problema . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3. Seleccion Adversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.1. Problema de diseno del contrato . . . . . . . . . . . . . . . . . . . . 19
4.3.2. Implementacion del contrato . . . . . . . . . . . . . . . . . . . . . . 20
4.3.3. Reformulacion del problema de diseno . . . . . . . . . . . . . . . . 21
5. Resultados Principales 22
5.1. Menus de contratos implementables . . . . . . . . . . . . . . . . . . . . . . 22
5.2. Caracterizacion de los menus de contratos implementables . . . . . . . . . 24
5.2.1. Bosquejo de la implementacion . . . . . . . . . . . . . . . . . . . . 24
5.2.2. Implementacion del contrato . . . . . . . . . . . . . . . . . . . . . . 25
5.2.3. Reformulacion del problema de diseno . . . . . . . . . . . . . . . . 33
5.3. Problema de diseno del principal . . . . . . . . . . . . . . . . . . . . . . . 35
5.3.1. Condiciones necesarias de Optimalidad . . . . . . . . . . . . . . . . 35
5.3.2. Estatica Comparativa . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4. Ejemplo ilustrativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.5. Extensiones: Supuesto de senales discretas . . . . . . . . . . . . . . . . . . 43
5.5.1. Senal continua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.5.2. Equivalencia de ambos modelos . . . . . . . . . . . . . . . . . . . . 43
5.5.3. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.5.4. Senal discreta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Page 6
INDICE GENERAL III
6. Aplicaciones 49
6.1. Aplicacion 1: Tipos de Contratos . . . . . . . . . . . . . . . . . . . . . . . 49
6.1.1. Motivacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.1.2. Contrato de venta . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.1.3. Contrato de incentivos . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.1.4. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.2. Aplicacion 2: Acumulacion de capital humano . . . . . . . . . . . . . . . . 54
6.2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.2.2. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.2.3. Esquema del Juego . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.2.4. Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.2.5. Juego Repetido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.2.6. Comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7. Conclusiones 61
8. Bibliografıa 64
9. Anexo 66
9.1. Condiciones necesarias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.2. Condiciones suficientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.3. Estatica comparativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
9.4. Senal del Monitoreo en el Beneficio . . . . . . . . . . . . . . . . . . . . . . 75
Page 7
Capıtulo 1
Revision Bibliografica
1.1. Literatura
Una caracterıstica comun de las relaciones contractuales es la existencia de problemas de
agencia. Por un lado se tiene el problema de riesgo moral (analizados por primera vez
por Mirrlees 1971, Mirrlees 1974 y Mirrlees 1975), el cual se origina cuando el principal
solo observa una senal ruidosa (resultados) de la variable que desea controlar (esfuerzo).
Por ejemplo, las ventas de un vendedor viajero dependen de su esfuerzo pero tambien
de circunstancias fuera de su control como son las visitas de otros vendedores, el clima,
situacion economica, etc. Ası, el principal (empleador) solo puede observar las ventas que
es una senal ruidosa del esfuerzo realizado por el agente (empleado). Dicho en otras pa-
labras, no tiene sentido que el principal pague altos bonos, a agentes que tuvieron altas
ventas debido a factores exogenos a su comportamiento. Por otro lado se tiene la seleccion
adversa, que es cuando el tipo del agente es informacion privada y a priori no tiene incen-
tivos a revelarlo. Por ejemplo, un conductor conoce mejor sus caracterısticas de lo que las
conoce su companıa de seguros, y los peores conductores quieren hacerse pasar por buenos
conductores. Otro ejemplo son las firmas reguladas que conocen mejor sus costos que el
regulador, y tienden a revelar mayores costos de los reales, pues de esta forma obtienen
mas altas tarifas. Por ultimo, una persona que desea afiliarse a una Isapre conoce mejor
su posibilidad de enfermedad que la Isapre, y siempre tendera a revelarse mas sano de lo
que realmente es.
1
Page 8
CAPITULO 1. REVISION BIBLIOGRAFICA
Sin embargo, hay una serie de situaciones en las que ambos fenomenos coexisten. A modo
de ejemplo, se considera el problema de regulacion de un monopolio (Laffont and Tirole
1986). El monopolio tiene una eficiencia productiva desconocida θ (seleccion adversa) y
puede poner mayor o menor esfuerzo e en reducir los costos marginales (riesgo moral).
Sin embargo, en este modelo se considera que el regulador observa los costos marginales
de la firma CMg = θ− e y por lo tanto, las desviaciones de la firma pueden ser solo con-
siderando una variable. La otra queda completamente determinada por la observabilidad
del regulador. A este fenomeno se le llama falso riesgo moral.
Otros ejemplos concretos de considerar los problemas simultaneamente, son los proble-
mas de contratacion entre un banquero de inversion y el emisor de una oferta publica
inicial (OPI), entre un capitalista de riesgo y un empresario, o entre los inversionistas y
el manager (Ver Baron 1982 y Baron y Holmstrom 1980 para la contratacion de OPI,
Dybvig, Farnsworth y Carpenter 2001 para la contratacion del manager). En cada uno de
estos casos el agente tiene informacion privada acerca de su tipo que puede ser entendido
como su productividad, eficiencia del esfuerzo, su calidad o bien la del proyecto, etc. (se-
leccion adversa) y realiza una accion de interes del principal, que no es verificable (riesgo
moral). Se han estudiado otras aplicaciones en el caso de contratos laborales y ademas
de la relacion consumidor-firma (Para ver mas aplicaciones se puede consultar el libro de
Laffont and Tirole 1993).
1.2. Modelo discreto
El ejemplo que se considera a continuacion es desarrollado por Bolton, Pivetta, y Roland
1997, pero este problema ha sido explorado completamente por Rhodes-Kropf y Viswanathan
2000 y Lewis y Sappington 2000. Se considera el problema de un vendedor neutral al riesgo
(principal), que vende una firma a un comprador neutral al riesgo (agente). El comprador
puede generar un flujo de ingresos inciertos mediante la ejecucion de esta firma. Se supone
que solo hay dos posibles ingresos: X ∈ {0, R}. El comprador tiene una capacidad para lo-
grar mas o menos probablemente el mejor resultado. Adicionalmente, el comprador puede
realizar un mayor esfuerzo de manera de lograr mas probablemente el mejor resultado.
2
Page 9
CAPITULO 1. REVISION BIBLIOGRAFICA
Sea θ la capacidad del comprador y se supone que θ ∈ {θL, θH} con θL < θH . El vendedor
no sabe el tipo del comprador, y su creencia es que con probabilidad β es un agente de
tipo θH y con 1− β es un agente de tipo θL.
Sea e el esfuerzo, y se supone que el agente de tipo θ tiene una probabilidad de θ · e de
obtener un resultado R y un costo asociado al esfuerzo de ψ(e) ≡ c2e2. El problema del
vendedor es disenar un menu de contrato (ti, ri) que maximice el retorno esperado de la
venta. En este caso ti representa el pago fijo que debe realizar el comprador, y ri es el
pago que debe realizar si obtiene un resultado R. Para esto debe cumplir que 0 ≤ ri ≤ R.
La funcion de utilidad del agente (comprador) es la siguiente:
θi e (R − ri)− ti −c
2e2 , i = L,H
La decision optima del esfuerzo a realizar por el comprador bajo un contrato (ti, ri), es:
ei = θi(R − ri)/c
Luego su maximo pago bajo ese contrato es:
1
2c[θi (R− ri)]
2 − ti
Se debe notar que el esfuerzo optimo no depende del pago fijo ti, sino solo de ri. Luego el
problema del vendedor es:
maxti,ri
{β[tH + θ2H(R − rH)rH/c
]+ (1− β)
[tL + θ2L(R− rL)rL/c
]}
Sujeto a:
1
2c[θi (R− ri)]
2 − ti ≥1
2c[θj (R− rj)]
2 − tj ∀(i, j) ∈ {(H,L), (L,H)}
1
2c[θi (R − ri)]
2 − ti ≥ 0 ∀i = L,H
3
Page 10
CAPITULO 1. REVISION BIBLIOGRAFICA
1.2.1. Contratos Optimos con solo Riesgo Moral
Se supone en esa seccion que la capacidad el comprador es observable, por lo tanto el
unico problema de incentivo tiene relacion con el riesgo moral. El problema del principal
puede ser tratado separadamente para cada tipo i, y queda como sigue:
maxti,ri
{ti + θ2i (R− ri)ri/c}
Sujeto a:1
2c[θi (R − ri)]
2 − ti ≥ 0 ∀i = L,H
Si se asume la restriccion de participacion activa, entonces el problema queda como sigue:
maxri
{1
2cθ2i (R
2 − r2i )
}
Luego este problema tiene una solucion simple que es ri = 0 y ti = θ2i R2/(2c). Esto quiere
decir que venden completamente la firma sin dejar ninguna participacion.
1.2.2. Contratos Optimos con solo Seleccion Adversa
Se supone ahora que el nivel del esfuerzo del comprador es fijo en un nivel e, sin embargo
el vendedor no puede observar el talento del comprador. El problema del vendedor es el
siguiente:
maxti,ri
{β [tH + θH erH ] + (1− β) [tL + θLerL]}
Sujeto a:
θi (R − ri) e− ti ≥ θj (R− rj) e− tj ∀(i, j) ∈ {(H,L), (L,H)}
θi (R− ri) e− ti ≥ 0 ∀i = L,H
Este problema tambien tiene una solucion simple: ri = R y ti = −ce2/2. Este contra-
to minimiza la renta informacional del comprador. De hecho, la extrae toda sin inducir
ninguna distorsion. Intuitivamente, en la ausencia de riesgo moral, la mejor forma com-
patible en incentivos de extraer rentas del agente corresponde a pedirle el total de las
futuras retornos (y por lo tanto, el principal no recibe dinero por adelantado de hecho
otorga dinero).
4
Page 11
CAPITULO 1. REVISION BIBLIOGRAFICA
1.2.3. Contratos Optimos con Seleccion Adversa y Riesgo Moral
La simplicidad de las soluciones anteriores es, por supuesto, impulsada por las sencilla
especificaciones funcionales. No es de extranar, que el menu de contratos optimo cuando
se consideran ambos problemas de incentivos simultaneamente es una combinacion de las
dos soluciones extremas que se han senalado. Para la resolucion, se puede observar que
solo la restriccion de participacion voluntaria del agente del tipo bajo, y la restriccion de
compatibilidad de incentivos del agente de tipo alto seran activas. De hecho, en el caso de
informacion simetrica (es decir, cuando hay solo riesgo moral), el vendedor se las arregla
para dejar el tipo de alta sin rentas, pero este resultado es el que induce a imitar al agente
de tipo bajo. Cuando el agente de tipo bajo obtiene rentas positivas, entonces el tipo alto
tambien las obtendra, ya que este siempre se puede hacer pasar por el agente de tipo bajo.
Por lo tanto, el principal tiene que resolver el siguiente problema:
maxti,ri
{β[tH + θ2H(R − rH)rH/c
]+ (1− β)
[tL + θ2L(R− rL)rL/c
]}
Sujeto a:1
2c[θH (R− rH)]
2 − tH =1
2c[θH (R − rL)]
2 − tL
1
2c[θL (R− rL)]
2 − tL = 0
Usando las dos condiciones se puede eliminar las variables tH y tL de la funcion objetivo,
y ası obtener la condicion de eficiencia al top, que corresponde a rH = 0, como en el caso
de solo Riesgo Moral. De todas maneras, el valor de rL surge a partir de la condicion de
primer orden. Esta senala el trade-off entre extraer excedente del agente de tipo bajo y la
renta informacional concedida al agente de tipo alto. Despejando se obtiene:
rL =β(θ2H − θ2L)R
β(θ2H − θ2L) + (1− β)θ2L
Es importante notar que el valor es mayor a cero. El menu de contratos optimo es tal que
no hay distorsiones a los agentes de mayor tipo. Sin embargo, se produce una distorsion a
los agentes de tipo bajo, debido a que se intenta reducir la renta informacional concedida
al agente de tipo alto.
5
Page 12
CAPITULO 1. REVISION BIBLIOGRAFICA
En conclusion, en esta aplicacion bajo solo riesgo moral la mejor estrategia es vender la
empresa al gerente por un precio fijo con el fin de inducir el posterior esfuerzo eficiente.
En virtud de solo la seleccion adversa, el vendedor debe quedarse con el total de los
ingresos futuros de la empresa, a fin de dejar sin rentas informacionales a la gerente.
En contraste con estas dos soluciones extremas, cuando ambos problemas de informacion
estan presentes, el contrato optimo induce un esfuerzo eficiente para el agente de tipo alto
y distorsiona los esfuerzos del otro tipo. A partir del modelo anterior surge la pregunta
de la sensibilidad de los resultados a la consideracion discreta de las variables, de como es
la eficiencia en cada caso, de cuales son las distorsiones que genera cada tipo de contrato,
etc.
6
Page 13
Capıtulo 2
Introduccion
Motivados por los ejemplos anteriores, este trabajo tiene como objetivo entender la economıa
de las relaciones contractuales en la presencia de riesgo moral y seleccion adversa. Se ofrece
un modelo simple en el que ambos aspectos simultaneamente pueden ser estudiados y se
demuestra que su combinacion tiene un efecto no trivial sobre las caracterısticas cualita-
tivas de los contratos compatibles en incentivos optimos.
Se estudia un modelo de agente-principal en que el agente realiza un esfuerzo no obser-
vable y posee informacion privada sobre la tecnologıa de monitoreo. Realizar esfuerzo es
costoso para el agente, pero a la vez tal esfuerzo produce beneficios monetarios al princi-
pal. Tanto el esfuerzo no observable como la informacion privada del agente determinan la
distribucion de una senal publica verificable. Esto se refiere a que se puede ir a una corte
de justicia y verificar, a bajo costo, el valor de la variable. El principal disena un menu de
contratos de modo tal de maximizar su pago esperado tomando en cuenta los problemas
de incentivos en la relacion contractual.
En el modelo base, se supone que tanto el esfuerzo como los tipos privados son variables
continuas. Para la mayorıa de los resultados, suponemos ademas que el esfuerzo y el tipo
privado del agente no solo hacen mas probable senales altas, sino que ademas son comple-
mentos. Como se describe a continuacion, este supuesto tiene implicancias cruciales en la
forma de los perfiles de esfuerzo implementables.
El primer resultado adopta tecnicas de diseno de mecanismos (Myerson 1981) para ca-
racterizar la familia de contratos implementables. Los pagos contingentes al resultado del
monitoreo, quedan completamente determinados a partir de la funcion de esfuerzo que el
7
Page 14
CAPITULO 2. INTRODUCCION
principal propone al agente. Se muestra que un contrato es implementable si y solo si el
perfil de esfuerzos asociado es diferenciable casi en todas partes y su derivada es mayor
o igual a una funcion lineal de la complementariedad en el monitoreo. Esta condicion,
que se le llama restriccion de doble desviacion, captura la posibilidad que tiene el agente
de decidir un esfuerzo optimo contingente a cualquier contrato ofrecido en el menu. Una
implicancia de este resultado es que un perfil de esfuerzos implementable es estrictamente
creciente en el tipo del agente y ası, contratos pooling no pueden implementarse. Al con-
trario de Myerson (1981) donde la restriccion que surge de la implementacion no es activa,
la doble desviacion tiene fuertes implicancias en el diseno del menu de contratos optimos,
pues genera distorsiones no triviales.
Para entender este resultado, se supone que se puede implementar un esfuerzo constante
sobre algun intervalo. Luego, el poder de los contratos ofrecidos a los tipos mas bajos debe
ser mayor estricto que el ofrecido a los tipos mas altos pues, de otra manera, los tipos ba-
jos se esforzarıan menos que los altos. Pero en este caso, los tipos altos preferirıan hacerse
pasar por tipos bajos de modo tal de enfrentar contratos de alto poder y obtener pagos mas
altos. Se sigue que necesariamente los esfuerzos deben ser estrictamente crecientes para
poder ser implementados en la presencia de riesgo moral y seleccion adversa. Es sensato
pensar ademas que a medida que la complementariedad del esfuerzo y el tipo aumenta, en-
tonces la condicion se vuelve mas restrictiva, pues el efecto de la doble desviacion aumenta.
Con la caracterizacion anterior, se plantea el problema del principal como un problema
de control optimo. Usando tecnicas de estatica comparativa robusta, se muestra como se
pueden derivar propiedades de manera simple e intuitiva. Se plantea ademas las condi-
ciones necesarias de Pontryagin para caracterizar las soluciones del problema del principal.
Se ilustra como la combinacion de riesgo moral y seleccion adversa determinan la forma
de los menus de contratos optimos y causan ineficiencias considerando un simple modelo,
en el que la senal sobre la que se contrata no es directamente productiva, sino que es
monitoreo puro. Por ejemplo si se considera el caso de un vendedor de tienda en donde
el tipo es la capacidad que puede lograr mejores transferencias trampeando el monitoreo
y no logrando mayores beneficios para el principal. En este contexto, si bien el esfuerzo
o el tipo no es verificable, el principal puede alcanzar el primer mejor usando contratos
de incentivos de poder creciente. Es decir, cuando hay solo seleccion adversa o solo riesgo
moral, la asimetrıa de informacion no tiene costos para el principal. Es precisamente bajo
la presencia de selecciona adversa y riesgo moral cuando las asimetrıas de informacion
8
Page 15
CAPITULO 2. INTRODUCCION
son costosas para el principal. En efecto, cualquier perfil de esfuerzos implementable debe
ser estrictamente creciente y, en consecuencia, el primer mejor no se puede alcanzar. El
principal distorsiona el esfuerzo de los tipos bajos a la baja, y el de los tipos altos a la alza
de modo de minimizar el costo de la informacion asimetrica. Notablemente, los menus de
transferencias de utilidad ofrecidos por el principal son constantes en el tipo.
En el capıtulo 3 se describe el juego y los supuestos a considerar. En el capıtulo 4, se
desarrollan los modelos del primer mejor, de solo Riesgo Moral y de solo Seleccion Adversa.
En el capıtulo 5 se desarrolla el modelo que contempla ambos problemas simultaneamente.
Por ultimo se analiza un ejemplo particular que senala que la ineficiencia se produce
solo cuando hay ambos problemas de asimetrıa de informacion simultaneamente. En el
capıtulo 6 se consideran dos aplicaciones del modelo desarrollado. En la primera de ellas
se analiza la decision optima del principal, en cuanto a desarrollar un contrato de venta o
de incentivos. En la segunda aplicacion se analiza un modelo continuo de capital humano
donde se encuentra endogenamente la distribucion de los tipos. Por ultimo en el capıtulo
8 se presentan las conclusiones, comentarios finales y el alcance del documento.
9
Page 16
Capıtulo 3
Modelo
3.1. Juego
3.1.1. Pagos
Se considera un modelo de agente-principal, donde el primero puede emitir una senal
buena o mala con cierta probabilidad que depende de su esfuerzo y de su tipo. En base
a esta senal ruidosa del esfuerzo y del tipo, realiza transferencias (wb, wg). La utilidad de
un agente de tipo θ ∈[θ, θ]que acepta un salario de (wb, wg), y realiza un esfuerzo e es:
U(e, θ, wg, wb) = p(e, θ)u(wg) + (1− p(e, θ))u(wb)− ψ(e) ,
donde p(e, θ) es la probabilidad de lograr una buena senal dado de que el agente es de
tipo θ y realiza un esfuerzo laboral e y ψ(e) se define como el costo de esforzarse e. De
esta manera se considera que los distintos tipos de agentes tienen distintas probabilidades
en el monitoreo. La utilidad del principal para una funcion de densidad o distribucion del
tipo de los agentes igual a f(θ), es:
V (e(.), wg(.), wb(.)) =
∫ θ
θ
[B(e(θ), θ)− p(e(θ), θ)wg(θ)− (1− p(e(θ), θ))wb(θ)] f(θ)dθ ,
donde B(e, θ) es el beneficio que obtiene el principal al lograr un esfuerzo e de un agente
de tipo θ.
10
Page 17
CAPITULO 3. MODELO
3.1.2. Esquema del juego
El modelo consta de cuatro instantes.
En un primer periodo el agente obtiene un tipo θ ∈[θ, θ].
En el segundo periodo, el principal disena el contrato que le ofrecera al agente.
En un instante posterior el agente decide si aceptar o no el menu de contrato.
Si decide no aceptar se termina el juego y obtiene utilidad de reserva. Si acepta,
entonces escoge un contrato particular del sistema de remuneraciones planteado por
el principal.
El agente realiza un esfuerzo e ∈ [e, e].
Luego el principal realiza pagos al agente segun el contrato ofrecido (y aceptado),
dependiendo de los resultados estocasticos del monitoreo.
La siguiente ilustracion senala de manera resumida el esquema del juego.
11
Page 18
CAPITULO 3. MODELO
3.2. Supuestos
Dentro de los supuestos que se asumen en este modelo, se tienen las siguientes categorıas.
1. Supuestos de monotonıa.
a) Agente neutral al riesgo.
u(w) = w ∀w
Aun cuando se realiza este supuesto, hay algunos resultados que no lo requieren.
b) Costos de esforzarse crecientes y convexos.
ψe(e) > 0, ψe,e(e) > 0 ∀e
Este supuesto es natural ya que senala que el esfuerzo es costoso y que su
desutilidad aumenta con el nivel del esfuerzo.
2. Condiciones de Inada.
a) Costo marginal nulo en el esfuerzo inferior del soporte.
ψe(e) = 0
b) Costo marginal infinito en el esfuerzo superior del soporte.
lime→ e
ψe(e) = ∞
3. Supuestos de productividad de los agentes.
a) Probabilidades consistentes con los esfuerzos.
pe(e, θ) > 0, ∀e, ∀θ
A medida que el agente se esfuerza mas entonces mas probablemente obten-
dra el mejor resultado.
b) Aumentos marginales decrecientes en el esfuerzos.
pe,e(e, θ) ≤ 0, ∀e, ∀θ
12
Page 19
CAPITULO 3. MODELO
En general este supuesto se asume para asegurar la existencia de un esfuerzo
de equilibrio. En el caso en que tuviesen retornos crecientes, entonces even-
tualmente al agente podrıa convenirle esforzarse lo maximo posible. Esto hace
que la aproximacion de primer orden sea valida como condiciones suficientes
en general.
4. Supuestos del beneficio del principal.
a) Beneficio consistente con el esfuerzo.
Be(e, θ) > 0, ∀e, ∀θ
El beneficio del principal aumenta con el esfuerzo del agente.
b) Aumentos marginales decrecientes en el esfuerzos.
Be,e(e, θ) ≤ 0, ∀e, ∀θ
Si bien es cierto el beneficio del principal aumenta con el esfuerzo del agente,
este es a tasa decreciente.
c) Beneficio consistente con el tipo.
Bθ(e, θ) ≥ 0, ∀e, ∀θ
A medida que el agente es de un mayor tipo, entonces el beneficio del principal
no disminuye.
5. Supuestos de tipo de los agentes.
a) A mayor tipo, mayor probabilidad de exito en los resultados.
pθ(e, θ) > 0, ∀e, ∀θ
De manera de diferenciar los tipos entonces se asume que a mayor θ entonces
mas facil es lograr el buen resultado.
b) A mayor tipo, mayor poder discriminador.
pe,θ(e, θ) > 0, ∀e, ∀θ
13
Page 20
CAPITULO 3. MODELO
Esta propiedad implica la single crossing property, pues el agente de un mayor
tipo le conviene realizar un mayor esfuerzo para un mismo contrato. El termino
del supuesto es denominado complementariedad del monitoreo.
c) A mayor tipo, mayor productividad.
Be,θ(e, θ) ≥ 0, ∀e, ∀θ
Senala que el beneficio marginal del esfuerzo aumenta con el tipo del agente. El
termino de dicha restriccion es denominado complementariedad del beneficio.
14
Page 21
Capıtulo 4
Benchmark
4.1. Primer mejor
El caso del primer mejor es cuando el agente es el dueno de la empresa y por ende no
existe ninguna relacion asimetrica. Hay informacion sobre el tipo y el esfuerzo es una
variable controlable, pues el mismo dueno lo realiza. En dicho caso para el agente de tipo
θ se resuelve el siguiente problema:
maxe∈[e,e]
{B(e, θ)− ψ(e)}
La condicion de primer orden que se deriva del problema anterior es la siguiente:
Be(eFB(θ), θ) = ψe(e
FB(θ))
Dicha condicion muestra que el esfuerzo optimo es aquel que hace que el beneficio marginal
y el costo marginal se igualen.
4.2. Riesgo Moral
Si el principal conociese el tipo θ del agente entonces no existirıa el problema de seleccion
adversa. El problema que enfrenta el principal para el diseno del menu de contratos es el
siguiente:
max{e(θ),wb(θ),wg(θ)}θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− p(e(θ), θ)wg(θ)− (1− p(e(θ), H))wb(θ)] f(θ)dθ
15
Page 22
CAPITULO 4. BENCHMARK
Sujeto a:
Participacion voluntaria (en adelante PV):
U(e(θ), θ, wg(θ), wb(θ)) ≥ U0 ∀θ
Compatibilidad de Incentivos en el sentido de Riesgo Moral (en adelante CIRM):
e(θ) ∈ argmaxe
{U(e, θ, wg(θ), wb(θ))} ∀θ
La restriccion de compatibilidad de incentivo indica que el esfuerzo que propone el prin-
cipal en el contrato, debe ser consistente con la racionalidad del agente. Esto es porque
con las transferencias de salario, el principal incentiva al agente a realizar un determinado
esfuerzo. Por otro lado, la restriccion de participacion voluntaria indica que la utilidad
ofrecida al agente debe ser superior a la utilidad de reserva, lo cual indica que el agente
tiene incentivos a aceptar el contrato.
4.2.1. Implementacion del Contrato
En este caso las utilidades quedan determinadas por las restricciones de participacion
voluntaria y compatibilidad de incentivos en Riesgo Moral. Esto es debido a que en el
optimo el principal no cede rentas al agente y por ende la restriccion de participacion
voluntaria se cumple con igualdad para todos los tipos.
Proposicion 1. Son equivalentes las siguientes proposiciones:
1) El menu de contratos cumple con CIRM.
2) El contrato cumple las siguientes dos condiciones:
wg(θ) = U(θ) + ψ(e(θ)) +(1− p(e(θ), θ))ψe(e(θ))
pe(e(θ), θ)
wb(θ) = U(θ) + ψ(e(θ))−p(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
16
Page 23
CAPITULO 4. BENCHMARK
Demostracion. Primero se demuestra que 1) ⇒ 2).
Si se supone que un contrato cumple compatibilidad de incentivos entonces debe cumplirse
que:
e(θ) ∈ argmaxe
{p(e, θ)wg + (1− p(e, θ))wb − ψ(e)}
Y por lo tanto debe cumplirse que:
(wg − wb) pe(e(θ), θ) = ψe(e(θ))
Y por lo tanto:
U(θ) = (wg − wb) p(e(θ), θ) + wb − ψ(e(θ))
=
(ψe(e(θ))
pe(e(θ), θ)
)p(e(θ), θ) + wb − ψ(e(θ))
Luego se pueden despejar los transferencias de utilidad demostrando ası la parte 2) de la
proposicion.
Demostracion de 2) ⇒ 1). Se puede notar (restando ambas condiciones) facilmente que:
(wg − wb) pe(e(θ), θ) = ψe(e(θ))
Por otro lado se puede ver que gracias a los supuestos del modelo y que u(wg) ≥ u(wb)
entonces:
(wg − wb) pe,e(e(θ), θ)− ψe,e(e(θ)) ≤ 0
Luego se tiene que:
e(θ) ∈ argmaxe
{p(e, θ)wg + (1− p(e, θ))wb − ψ(e)}
Y por lo tanto, cumple compatibilidad de incentivos en riesgo moral. Con esto queda
demostrada la proposicion.
Por otro lado, para que cumpla PV es necesario que cumpla que U(θ) ≥ U0 ∀θ ∈[θ, θ].
En particular, en el diseno optimo de contratos se tendra que U(θ) = U0 ∀θ ∈[θ, θ]. Esto
significa que el principal no cede rentas al agente.
17
Page 24
CAPITULO 4. BENCHMARK
La utilidad del principal queda como:
π(θ, e, wg(θ), wb(θ)) = B(e(θ), θ)− p(e(θ), θ)wg(θ)− (1− p(e(θ), H))wb(θ))
= B(e(θ), θ)− p(e(θ), θ)wg(θ)− (1− p(e(θ), H))wb(θ)
= B(e(θ), θ)− U0 − ψ(e(θ))
4.2.2. Solucion del problema
Si en base a lo desarrollado anteriormente, se reformula el problema de diseno que el
principal resuelve:
max{e(θ)}
θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− U0 − ψ(e(θ))] f(θ)dθ
Este es el caso conocido como Second-Best, donde solo hay Riesgo Moral, pues el esfuerzo
es no-verificable y el tipo del agente es conocido por el principal.
Proposicion 2. El esfuerzo que implementa el principal en el caso de solo tener el pro-
blema de Riesgo Moral es equivalente al esfuerzo del primer mejor.
Demostracion. Es directo de los resultados anteriores, pues el esfuerzo que desea imple-
mentar el principal en el caso de considerar solo Riesgo Moral (Second Best) es equivalente
al primer mejor, pues resuelve el siguiente problema:
maxe∈[e,e]
{B(e(θ), θ)− U0 − ψ(e(θ))}
Con esto se concluye que ePM(θ) = eRM (θ) ∀θ.
El resultado anterior indica que el problema de Riesgo Moral no genera una ineficiencia,
sino solo un traspaso de utilidades. La intuicion detras de este resultado es que mediante
los bonos, es decir wg(θ)−wb(θ), se puede inducir cualquier funcion de esfuerzo. Ademas
con el nivel se puede obtener la participacion voluntaria. Luego el esfuerzo a inducir
por medio de la obediencia es un grado de libertad, el cual optimamente el principal
escogera en el primer mejor. En la jerga matematica se senala que el problema para cada
θ esta subdimensionado.
18
Page 25
CAPITULO 4. BENCHMARK
4.3. Seleccion Adversa
Si solo se considera el problema de Seleccion Adversa entonces el esfuerzo es contratable,
pues es observable y verificable ante una corte. Es importante notar que las transferencias
de utilidades que otorga el principal al agente seran en terminos esperados las siguientes:
T (θ, θ) = p(e(θ), θ
)wg(θ) +
(1− p
(e(θ), θ
))wb(θ)
Se asumira inicialmente que wg(θ) = wb(θ) ∀θ, y por lo tanto, las transferencias solo
dependen del tipo que revela θ. Esto a priori no es obvio, pues aun cuando los bonos
no son requeridos para generar obediencia en el esfuerzos, tambien puede generar poder
informacional. Desde ahora se abusa de notacion, definiendo la transferencia esperada
como T (θ). Finalmente se probara que en este caso no dar bonos, es optimo. La utilidad
del agente que no depende en este caso del tipo θ, queda como:
U(θ) = T (θ)− ψ(e(θ))
Donde T es la funcion de transferencias de utilidades, θ es el tipo que declara y θ el tipo
real del agente.
Se considera la funcion de costos del agente dependiendo del esfuerzo e(θ), que en este
caso es verificable. Ademas se supone tal como antes que la funcion de costos es creciente
y convexa, es decir, ψe(e) > 0 y ψe,e(e) > 0. La utilidad del principal es:
∫ θ
θ
[B(e(θ), θ)− T (θ)] f(θ)dθ
4.3.1. Problema de diseno del contrato
El problema que debe resolver el principal en el diseno del contrato es el siguiente:
maxT (.),e(.)
∫ θ
θ
[B(e(θ), θ)− T (θ)] f(θ)dθ
Sujeto a:
Participacion voluntaria (PV)
T (θ)− ψ(e(θ)) ≥ U0
19
Page 26
CAPITULO 4. BENCHMARK
Compatibilidad de incentivos en el sentido de Seleccion Adversa (en adelante CISA)
θ ∈ argmaxθ
{T (θ)− ψ(e(θ))
}
La restriccion CISA indica que el contrato debe generar los incentivos de autoseleccion,
es decir, que el agente de tipo θ seleccione efectivamente el contrato de tipo θ. Esto es
comunmente conocido, como que el agente de tipo θ revele un tipo θ = θ.
4.3.2. Implementacion del contrato
Se define la utilidad indirecta como sigue:
V = maxθ
{T (θ)− ψ(e(θ))
}
Proposicion 3. Son equivalentes las siguientes aseveraciones:
1) CISA
2) El contrato cumple con:
T (θ) = ψ(e(θ)) + V
Demostracion. 1) ⇒ 2) Para que se cumpla 1) se debe cumplir que la utilidad para todos
los tipos θ sera igual. Esto es porque si se un contrato particular otorga menor utilidad que
el resto, entonces el agente asociado no tiene incentivos a autoseleccionar dicho contrato.
Luego se debe cumplir que T (θ) = ψ(e(θ)) + V ∀θ. Con V el valor de la utilidad de todos
los tipos θ de los agentes.
2) ⇒ 1) Se puede observar que:
T (θ)− ψ(e(θ)) = V
Luego efectivamente el agente de tipo θ tiene incentivos a seleccionar el contrato de tipo
θ.
La intuicion del resultado es que se ajusta la funcion de pagos a cualquier funcion de
esfuerzos. Por otro lado, hay extraccion completas de las rentas. Para cumplir participacion
voluntaria para todos los tipos, es necesario que V = U0 = T (θ)− ψ(e(θ)) ∀θ.
20
Page 27
CAPITULO 4. BENCHMARK
4.3.3. Reformulacion del problema de diseno
La proposicion demostrada indica que a partir de una funcion e :[θ, θ]→ [e, e] determi-
nada, se encuentra una unica funcion de transferencias. Luego el problema de diseno del
principal queda:
maxe(.)
∫ θ
θ
[B(e(θ), θ)− ψ(e(θ))− U0] f(θ)dθ
Proposicion 4. La solucion al problema de seleccion adversa, es la del primer mejor.
Demostracion. Directo a partir de la reformulacion del problema de diseno.
El resultado indica que en el caso de tener la seleccion adversa no se generan ineficiencias.
A partir de este resultado, es trivial darse cuenta que la condicion de bonos igual a cero,
impuesta en un comienzo es correcta.
21
Page 28
Capıtulo 5
Resultados Principales
En esta seccion se vuelve al modelo original introducido en el capitulo 3, es decir, se
analiza el problema de seleccion adversa y riesgo moral conjuntamente. El tipo del agente
es desconocido por el principal y el esfuerzo es una variable no observable ni verificable.
5.1. Menus de contratos implementables
Definicion 1. Se define un contrato como un vector (e, wb, wg) ∈ [e, e]×R2+, y un menu de
contratos como una funcion (e(.), wb(.), wg(.)) :[θ, θ]→ [e, e] × R2
+ que considera un
contrato particular a cada tipo de agente.
Se resuelve el problema por induccion reversa. En el ultimo periodo el agente de tipo θ,
trabaja si el contrato que le ofrece el principal le otorga un nivel de utilidad mayor a U0,
su utilidad de reserva.
En el caso en que el agente decida aceptar el contrato entonces escogera un esfuerzo
(informacion privada) que le maximice su utilidad, que no necesariamente correspondera al
esfuerzo propuesto por el principal. El esfuerzo optimo cumple con:
e∗(θ, wb, wg) = argmaxe
{U(e, θ, wb, wg)}
Por las condiciones de Inada, se asegura que existe un e donde se satisface que el costo
marginal de esforzarse debe ser igual al beneficio marginal, que en este caso corresponde
al aumento de la probabilidad de obtener un bono. En terminos analıticos se obtiene:
ψe(e∗(θ, wb, wg)) = pe(e
∗(θ, wb, wg), θ)(wg − wb)
22
Page 29
CAPITULO 5. RESULTADOS PRINCIPALES
Ademas se nota que este punto crıtico e = e∗(θ, wb, wg) es maximo global, debido a que se
cumple la condicion suficiente, pues ∀e Ue,e(e, θ, wg, wb) = pe,e(e, θ)(wg−wb)−ψe,e(e) < 0.
Luego se define la utilidad indirecta contractual del agente como sigue:
U∗(θ, wg, wb) = U(e∗(θ, wg, wb), θ, wg, wb)
Habiendo senalado el esfuerzo optimo del agente, es que se puede definir el problema que
enfrenta el principal para el diseno del menu de contratos:
max{e(θ),wb(θ),wg(θ)}θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− p(e(θ), θ)wg(θ)− (1− p(e(θ), H))wb(θ)] f(θ)dθ
Sujeto a:
Participacion voluntaria (PV):
U(e(θ), θ, wg(θ), wb(θ)) ≥ U0 ∀θ
Compatibilidad de Incentivos en el sentido de Riesgo Moral (CIRM):
e∗(θ, wb(θ), wg(θ)) = e(θ) ∀θ
Compatibilidad de Incentivos en el sentido de Seleccion Adversa (CISA):
θ ∈ argmaxθ′
{U∗(θ, wb(θ′), wg(θ
′))} ∀θ
Uno de los efectos que se considera importante en este juego es la posibilidad del agente
de realizar un esfuerzo contingente al contrato que le ofrece el principal, es decir que re-
alice su esfuerzo optimo off-path. A este efecto se le denomina doble desviacion, pues
la primera desviacion se considera como la eleccion de un contrato distinto al propuesto
para su tipo. En el caso en que no existiese esta posibilidad, tal como se denomina en la
literatura, se estarıa frente a un caso de falso riesgo moral.
Definicion 2. Un menu de contrato es implementable si cumplen con CISA, CIRM y
PV.
23
Page 30
CAPITULO 5. RESULTADOS PRINCIPALES
5.2. Caracterizacion de los menus de contratos im-
plementables
5.2.1. Bosquejo de la implementacion
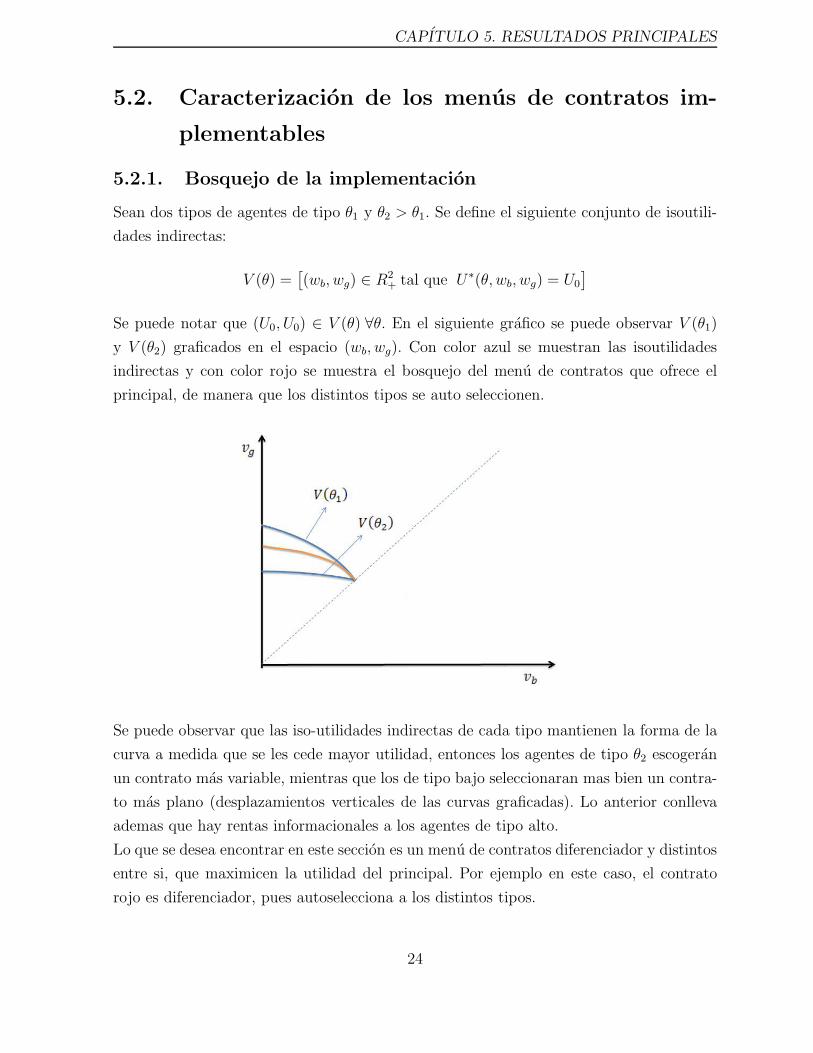
Sean dos tipos de agentes de tipo θ1 y θ2 > θ1. Se define el siguiente conjunto de isoutili-
dades indirectas:
V (θ) =[(wb, wg) ∈ R2
+ tal que U∗(θ, wb, wg) = U0
]
Se puede notar que (U0, U0) ∈ V (θ) ∀θ. En el siguiente grafico se puede observar V (θ1)
y V (θ2) graficados en el espacio (wb, wg). Con color azul se muestran las isoutilidades
indirectas y con color rojo se muestra el bosquejo del menu de contratos que ofrece el
principal, de manera que los distintos tipos se auto seleccionen.
Se puede observar que las iso-utilidades indirectas de cada tipo mantienen la forma de la
curva a medida que se les cede mayor utilidad, entonces los agentes de tipo θ2 escogeran
un contrato mas variable, mientras que los de tipo bajo seleccionaran mas bien un contra-
to mas plano (desplazamientos verticales de las curvas graficadas). Lo anterior conlleva
ademas que hay rentas informacionales a los agentes de tipo alto.
Lo que se desea encontrar en este seccion es un menu de contratos diferenciador y distintos
entre si, que maximicen la utilidad del principal. Por ejemplo en este caso, el contrato
rojo es diferenciador, pues autoselecciona a los distintos tipos.
24
Page 31
CAPITULO 5. RESULTADOS PRINCIPALES
5.2.2. Implementacion del contrato
Proposicion 5. (Bonos crecientes) CISA implica que los bonos en el contrato (vg(θ)− vb(θ))
son no decreciente en el tipo.
Demostracion. Se prueba por contradiccion. Se supone que ∃θ, θ′ con θ′ < θ tal que se
cumpla wg(θ) − wb(θ) < wg(θ′) − wb(θ
′). Sea V1 = (w1g , w
1b ) = (wg(θ
′), wb(θ′)) el par
de utilidades mas variables que es disenado para el agente de tipo θ′, y V2 = (w2g , w
2b) =
(wg(θ), wb(θ)) el par de utilidades mas plano disenado para el agente de tipo θ. Se muestra
que lo anterior es contradictorio. Se define ∆U(θ) como la diferencia de utilidad que le
genera el par de utilidades V2 por sobre V1, es decir:
∆U(θ) =(w2g − w2
b
)p(e∗(θ, w2
g, w2b ), θ) + w2
b − ψ(e∗(θ, w2g , w
2b))
− {(w1g − w1
b
)p(e∗(θ, w1
g, w1b ), θ) + w2
b − ψ(e∗(θ, w1g , w
1b))}
Si se diferencia con respecto a θ , se obtiene lo siguiente:
d
dθ[∆U(θ)] =
(w2g − w2
b
)pθ(e
∗(θ, w2g, w
2b ), θ)−
(w1g − w1
b
)pθ(e
∗(θ, w1g , w
1b ), θ)
Como w2g−w
2b < w1
g−w1b entonces e
∗(θ, w2b , w
2b ) < e∗(θ, w1
g , w1b ) y por ende, d∆U(θ)/dθ < 0.
Si el agente de tipo θ′ prefiere el contrato V1 por sobre el V2 entonces necesariamente un
agente de tipo θ > θ′ tambien. Esto es inconsistente con la restriccion CISA.
Proposicion 6. (Esfuerzo creciente) Si el menu de contratos es implementable entonces
la funcion de esfuerzo a inducir por el principal es estrictamente creciente en el tipo del
agente.
Demostracion. Se demuestra por contradiccion. Sean dos tipos distintos θ1 y θ2 con θ1 <
θ2. Se supone que e(θ1) ≥ e(θ2). Por la restriccion CIRM, debe cumplirse que:
wg(θ)− wb(θ) =ψe(e(θ))
pe(e(θ), θ)
Luego se puede mostrar que wg(θ1)−wb(θ1) > wg(θ2)−wb(θ2). Esto es contradictorio con
la proposicion anterior de Bonos crecientes. Con lo anterior se obtiene el resultado pedido,
pues se debe cumplir que e(θ1) < e(θ2).
Debido a que e :[θ, θ]→ R+ es una funcion creciente entonces es diferenciable en casi
todas partes (Royden 1987). En esta linea es sensato hablar de de(θ)/dθ c.t.p.
25
Page 32
CAPITULO 5. RESULTADOS PRINCIPALES
Proposicion 7. Si se considera CIRM, entonces no se pueden implementar contratos
pooling.
Demostracion. Se supone que existe un contrato pooling (wb, wg, e). Ahora notemos que
un agente de mayor tipo θ realiza un mayor esfuerzo optimo. Esto es debido a que:
ψe(e∗(θ, wb, wg))
pe(e∗(θ, wb, wg), θ)= wg − wb
Por lo tanto, no es posible hacer inducir un mismo esfuerzo e a todos los agentes. Mas
precisamente se puede notar que, a unos mismos niveles de utilidad transferidos (wb, wg),
los de mayor tipo realizan optimamente un mayor esfuerzo.
Teorema 1. (Implementacion del contrato) Son equivalentes las siguientes proposiciones:
1. El menu de contratos cumple con las siguientes tres ecuaciones:
wg(θ) = wg(θ)+ψ(e(θ))|θ
θ+(1− p(e(θ), θ))ψe(e(θ))
pe(e(θ), θ)
∣∣∣∣θ
θ
+
∫ θ
θ
pθ(e(S), S)ψe(e(S))
pe(e(S), S)dS ∀θ
wb(θ) = wb(θ)+ ψ(e(θ))|θθ−p(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
∣∣∣∣θ
θ
+
∫ θ
θ
pθ(e(S), S)ψe(e(S))
pe(e(S), S)dS ∀θ
de(θ)
dθ≥
pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))c.t.p. (en cada θ en que sea derivable)
2. El menu de contratos cumple con CISA y CIRM.
26
Page 33
CAPITULO 5. RESULTADOS PRINCIPALES
Demostracion. Para demostrar el teorema se debe probar que dicho contrato satisface
todas las restricciones descritas y luego que todas las restricciones descritas implican el
contrato propuesto.
1) ⇒ 2)
Afirmacion 1. El menu de contratos propuesto en 1) cumple con CIRM.
Esto se cumple debido a que:
wg(θ)− wb(θ) =ψe(e(θ))
pe(e(θ), θ)
Esto significa que:
e∗(θ, wb(θ), wg(θ)) = e(θ) ∀θ
Esto es porque la funcion ψe(e)/pe(e, θ) es estrictamente creciente en e y por ende inyectiva
en la misma variable.
Afirmacion 2. El contrato propuesto en 1) cumple con CISA.
Para ello primero se debe notar que:
dwg(θ)
dθ= (1− p(e(θ), θ))
d
dθ
[ψe(e(θ))
pe(e(θ), θ)
]
dwb(θ)
dθ= −p(e(θ), θ)
d
dθ
[ψe(e(θ))
pe(e(θ), θ)
]
Por otro lado se puede observar que dependiendo del contrato el agente de tipo θ, realiza
distintos niveles de esfuerzo. De hecho:
de∗(θ, wb(θ′), wg(θ
′))
dθ′=∂e∗(θ, wb(θ
′), wg(θ′))
∂wb(θ′)wb(θ
′) +∂e∗(θ, wb(θ
′), wg(θ′))
∂wg(θ′)wg(θ
′)
Como para la eleccion del esfuerzo optimo solo importa la variacion en los salarios (bonos)
es decir, wg(H)− wb(H), entonces se puede definir:
de(θ, θ′)
dv≡∂e∗(θ, wb(θ
′), wg(θ′))
∂wg(θ′)= −
∂e∗(θ, wb(θ′), wg(θ
′))
∂wb(θ′)
De hecho mas precisamente se puede encontrar dicha expresion mediante el procedimiento
27
Page 34
CAPITULO 5. RESULTADOS PRINCIPALES
de derivada implıcita, a la siguiente expresion:
ψe(e∗(θ, wb, wg))
pe(e∗(θ, wb, wg), θ)= wg − wb
Lo cual queda:d
dwg
[ψe(e
∗(θ, wb, wg))
pe(e∗(θ, wb, wg), θ)
]= 1
⇔ψe,e(e
∗(θ, wb, wg))de(θ,θ′)dv
pe(e∗(θ, wb, wg), θ)− ψe(e
∗(θ, wb, wg))pe,e(e∗(θ, wb, wg), θ)
de(θ,θ′)dv
[pe(e∗(θ, wb, wg), θ)]2 = 1
⇒de(θ, θ′)
dv=
pe(e∗(θ, wb, wg), θ)
2
ψe,e(e∗(θ, wb, wg))pe(e∗(θ, wb, wg), θ)− ψe(e∗(θ, wb, wg))pe,e(e∗(θ, wb, wg), θ)> 0
Tambien se observa que si se tiene que e(θ) es diferenciable:
de(θ)
dθ≥
pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
Entonces,
de(θ)
dθ[pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))]− pe,θ(e(θ), θ)ψe(e(θ)) ≥ 0
Por ende,
de(θ)dθ
[pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))]− pe,θ(e(θ), θ)ψe(e(θ))
[pe(e(θ)θ)]2 ≥ 0
lo que significa que,d
dθ
[ψe(e(θ)
pe(e(θ), θ)
]≥ 0
La condicion para que se cumpla la restriccion de CISA es:
θ ∈ argmaxθ′
{U∗(θ, wb(θ′), wg(θ
′))}
28
Page 35
CAPITULO 5. RESULTADOS PRINCIPALES
Ahora se resuelve el problema de maximizacion,
d
dθ′[U∗(θ, wg(θ
′), wb(θ′))] = pe(e
∗(θ, wg(θ′), wb(θ
′)), θ)de(θ, θ′)
dv(wg(θ
′)− wb(θ′)) (wg(θ
′)− wb(θ′))
+ p(e∗(θ, wg(θ′), wb(θ
′)), θ) (wg(θ′)− wb(θ
′))
− p(e(θ′), θ′)d
dθ′
[ψe(e(θ
′))
pe(e(θ′), θ′)
]
− ψe(e∗(θ, wg(θ
′), wb(θ′)))
de(θ, θ′)
dv(wg(θ
′)− wb(θ′))
Por la definicion de e∗(θ, wg(θ′), wb(θ
′)) se puede simplificar dicha expresion quedando que,
d
dθ′[U∗(θ, wg(θ
′), wb(θ′))] = [p(e∗(θ, wg(θ
′), wb(θ′)), θ)− p(e(θ′), θ′)]
d
dθ′
[ψe(e(θ
′))
pe(e(θ′), θ′)
]
Luego la condicion necesaria para encontrar el θ′ optimo es que p(e∗(θ, wg(θ′), wb(θ
′)), θ) =
p(e(θ′), θ′). Como se sabe que para un mismo contrato wg(θ′), wb(θ
′) un tipo de may-
or(menor) capital humano realizara mayor (menor) esfuerzo, entonces se tiene que el
agente de tipo θ prefiere revelar θ′ = θ. Como observacion se debe notar que se cumple:
p(e∗(θ, wg(θ′), wb(θ
′)), θ)− p(e(θ′), θ′)
> 0 si θ′ < θ
< 0 si θ′ > θ
Esto es debido a las propiedades pθ(e, θ) > 0 y pe(e, θ) > 0 y a que e∗(θ, wg(θ′), wb(θ
′)) es
creciente en θ. Lo ultimo se cumple debido a las propiedades ψe,e > 0, pe,e < 0 y pe,θ > 0
y a la definicion de e∗(θ, wg(θ′), wb(θ
′)), pues cumple:
wg(θ′)− wb(θ
′) =ψe(e
∗(θ, wg(θ′), wb(θ
′)))
pe(e∗(θ, wg(θ′), wb(θ′)), θ)
Con lo anterior y la propiedad de bonos crecientes se cumple entonces que el punto crıtico
θ′ = θ es maximo global. Con esto se verifica la condicion suficiente.
2) ⇒ 1)
Ahora se demuestra que todos los contratos que cumplen con las propiedades de 2) en-
tonces tienen la forma de 1). En el caso en que se desee encontrar un contrato discriminador
se tiene que cumplir que el tipo θ maximiza su utilidad U∗(θ, wb(θ′), wg(θ
′)) en θ′ = θ. Es
decir,∂U∗
∂wbwb +
∂U∗
∂wgwg = 0
29
Page 36
CAPITULO 5. RESULTADOS PRINCIPALES
⇒ wg = −wb
(∂U∗
∂wb
∂U∗
∂wg
)
Ademas, por el teorema de la envolvente se tiene que ∂U∗
∂wb= 1− p(e∗(θ, wb(θ), wg(θ)), θ) y
que ∂U∗
∂wg= p(e∗(θ, wb(θ), wg(θ)), θ). Luego si se reemplaza, se tiene que:
wg = wb
(1−
1
p(e∗(θ, wb(θ), wg(θ)), θ)
)
Luego si se utiliza el hecho de que dichos contratos cumpliran con compatibilidad de
incentivos para el esfuerzo dado, se tienen las siguientes dos condiciones necesarias:
wg(θ)− wb(θ) =ψe(e(θ))
pe(e(θ), θ)
wg = wb
(1−
1
p(e(θ), θ)
)
Si se considera ambas condiciones y se resuelve, queda que:
wb = −p(e(θ), θ)d
dθ
[ψe(e(θ))
pe(e(θ), θ)
]
wg = (1− p(e(θ), θ))d
dθ
[ψe(e(θ))
pe(e(θ), θ)
]
Si se encuentra la solucion de dicha ecuacion diferencial, mediante el procedimiento de
integracion por partes, queda que el menu de contratos cumple con las dos primeras
ecuaciones del teorema. Queda probar la tercera condicion del teorema que senala que,
d
dθ
[ψe(e(θ)
pe(e(θ), θ)
]≥ 0
Esto es equivalente a demostrar que la variabilidad de los contratos es creciente en el tipo,
es decir, wg(θ)− wb(θ) ≥ 0 ∀θ lo cual ya se ha probado en una proposicion anterior.
Con esto queda demostrado el teorema.
Es importante notar, que el resultado del teorema se puede obtener aun cuando no se
tengan agentes neutrales al riesgo, esto es utilizando transferencias de utilidades. Sin em-
bargo en la reformulacion del problema se generaran complicaciones adicionales, las cuales
se evitan con el supuesto.
30
Page 37
CAPITULO 5. RESULTADOS PRINCIPALES
La restriccion de PV se puede simplificar gracias a la siguiente proposicion.
Proposicion 8. Si el principal ofrece un menu de contratos que cumple CISA y CIRM,
entonces necesariamente dara una utilidad esperada creciente en el tipo θ.
Demostracion. Solo es necesario demostrar que para cualquier contrato (wb, wg) tal que
wg > wb entonces los agentes de mayor θ logran mayor utilidad.
Se consideran a dos agente de tipo θ1 y θ2, con θ1 < θ2. Luego se puede probar que:
U∗(θ1, wg, wb) = p(e∗(θ1, wg, wb), θ1)wg + (1− p(e∗(θ1, wg, wb), θ1))wb − ψ(e∗(θ1, wg, wb))
< p(e∗(θ1, wg, wb), θ2)wg + (1− p(e∗(θ1, wg, wb), θ2))wb − ψ(e∗(θ1, wg, wb))
≤ p(e∗(θ2, wg, wb), θ2)wg + (1− p(e∗(θ2, wg, wb), θ2))wb − ψ(e∗(θ2, wg, wb))
= U∗(θ2, wg, wb)
Se considera en la primera desigualdad wg > wb y el segundo paso es por la definicion
de e∗(θ2, wg, wb). Con la proposicion anterior se demuestra que en el menu de contratos
diferenciador solo es necesario preocuparse de la restriccion de PV para el tipo mas bajo.
A todo el resto de los agentes se les dara una renta informacional creciente en el tipo,
es decir obtendran una utilidad mayor a su utilidad de reserva. En conclusion se puede
cambiar la restriccion de PV por:
U(e(θ), θ, wg(θ), wb(θ)) ≥ U0
En este caso se asume que es optimo hacer participar a todos los tipos de agente. De todas
maneras no es difıcil levantar este supuesto y encontrar el valor de θ como el argumento
de una maximizacion de participacion. En dicho caso se puede encontrar una estatica
comparativa del valor corte. El valor θ puede ser interpretado en un modelo de acumulacion
de capital humano (ver aplicacion) como el nivel mınimo de capital humano requerido por
la firma.
31
Page 38
CAPITULO 5. RESULTADOS PRINCIPALES
Corolario 1. Sea un menu de contratos (e(θ), wb(θ), wg(θ)) ∀θ ∈[θ, θ]. Luego son equi-
valentes las siguientes proposiciones:
1. El menu de contratos es implementable.
2. El menu de contratos es tal que cumple:
i) wg(θ) = U(θ) + ψ(e(θ)) +(1− p(e(θ), θ))ψe(e(θ))
pe(e(θ), θ)+
∫ θ
θ
pθ(e(S), S)ψe(e(S))
pe(e(S), S)dS
ii) wb(θ) = U(θ) + ψ(e(θ))−p(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)+
∫ θ
θ
pθ(e(S), S)ψe(e(S))
pe(e(S), S)dS
iii) U(θ) ≥ U0
iv) e(θ) ≥pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))c.t.p.
Este corolario logra una completa caracterizacion del menu de contratos implementables.
Las transferencias contingentes a los resultados del monitoreo quedan completamente
determinadas, a partir de la funcion de esfuerzo a inducir. Esta tecnica es semejante a la
ocupada por Myerson 1981, salvo que aquı se encuentra una restriccion de pendiente no
trivial. Es importante dicha restriccion porque al contrario del clasico modelo de diseno de
la subasta optima, la restriccion es activa en muchos ejemplos como se vera mas adelante.
Demostracion. 1) ⇒ 2)
Por el teorema 1 se sabe que si se cumple compatibilidad de incentivos en el sentido de
seleccion adversa y en el sentido de riesgo moral, entonces se obtiene i), ii) y iv). Como
se cumple participacion voluntaria, entonces se necesita que la utilidad esperada de todos
los tipos sea mayor que U0.
U(θ, wb(θ), wg(θ)) = U(θ) +
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS ≥ U(θ)
Donde se puede observar que la renta informacional, propia del problema de seleccion
adversa, es:
Renta(θ) =
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
La cual es creciente en θ, es decir las personas que se de un mayor tipo obtendran una
mayor utilidad. Entonces para el menor tipo θ se tiene que cumplir que U(θ) ≥ U0, por
PV.
32
Page 39
CAPITULO 5. RESULTADOS PRINCIPALES
2) ⇒ 1)
Dicha demostracion es directa del teorema 1 y lo desarrollado anteriormente.
Por otro lado se sabe que en el optimo se cumplira que U(θ) = U0. Por lo tanto si se
reemplaza en los contratos propuestos en el teorema podemos definir los contratos para
una funcion de esfuerzo dada como:
u(wg(θ)) = wg(θ) = U0 + ψ(e(θ)) +(1− p(e(θ), θ))ψe(e(θ))
pe(e(θ), θ)+
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
u(wb(θ)) = wb(θ) = U0 + ψ(e(θ))−p(e(θ), θ)ψe(e(θ))
pe(e(θ), H)+
∫ H
H
[pH(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
Finalmente entonces el problema del principal es el siguiente:
max{e(θ)}
θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− p(e(θ), θ)u−1(wg(θ))− (1− p(e(θ), H))u−1(wb(θ))
]f(θ)dθ
Sujeto a:
Contratos implementables, es decir:
wg(θ) = U0 + ψ(e(θ)) +(1− p(e(θ), θ))ψe(e(θ))
pe(e(θ), θ)+
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
wb(θ) = U0 + ψ(e(θ))−p(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)+
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
de(θ)
dθ≥
pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
5.2.3. Reformulacion del problema de diseno
Gracias a que los agentes son neutrales al riesgo, es que entonces se puede simplificar el
problema enormemente. Lo que debe resolver el principal tiene la siguiente forma:
max{e(θ)}
θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− U0 − ψ(e(θ))−
∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
]f(θ)dθ
Sujeto a la restriccion de doble desviacion (DD):
de(θ)
dθ≥
pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
33
Page 40
CAPITULO 5. RESULTADOS PRINCIPALES
Se puede observar que si se aplica integracion por parte se puede demostrar que:
∫ θ
θ
[∫ θ
θ
[pθ(e(S), S)ψe(e(S))
pe(e(S), S)
]dS
]f(θ)dθ =
∫ θ
θ
[pθ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
](1− F (θ))dθ
La reformulacion del problema de maximizacion queda como sigue::
max{e(θ)}
θ∈[θ,θ]
∫ θ
θ
[B(e(θ), θ)− ψ(e(θ))−
[pθ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
]1− F (θ)
f(θ)
]f(θ)dθ − U0
Sujeto a:de(θ)
dθ≥
pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
Se puede observar que se le agrega un termino negativo en comparacion al caso del primer
mejor. Esto es bastante intuitivo, pues refleja el costo de la asimetrıa de informacion,
lo cual hace que el principal le ceda rentas informacionales a los agentes por efectos del
monitoreo.
Mas aun se le agrega una restriccion. Con ella se impone una condicion sobre la pendiente
de la funcion de esfuerzo, la cual en adelante se llamara condicion de doble desviacion
o bien DD. Esta condicion captura la posibilidad que tiene el agente de realizar un esfuerzo
optimo distinto al esfuerzo propuesto por el principal, para cada set de transferencias del
menu. En terminos estrictos, la restriccion DD senala que para que haya implementacion
y efectivamente se autoseleccionen los agentes, los esfuerzos a inducir deben ser mas que
crecientes (Notar que es positivo el termino de la restriccion, por los supuestos del mode-
lo). A medida que exista una mayor complementariedad del monitoreo entre el esfuerzo
y el tipo se requiere una mayor pendiente en los esfuerzos. La intuicion es que como
a los agentes de tipo mas alto les gustan mas los bonos que los agentes de tipo mas
bajo, debido a que generan un mayor esfuerzo y ası pueden logran mayores utilidades.
Los contratos autoseleccionadores consideran este efecto, y generan una distorsion de
pendiente. Adicionalmente, es importante mencionar que para el conjunto de tipos en
que la restriccion es activa, se tiene que el principal optimamente les ofrece un mismo
set de transferencias wg(θ), wb(θ). Dichas transferencias son equivalentes a las que se
les otorgarıa en el problema irrestricto a un individuo representativo. Esto hace pensar
que como existe un grado de complementariedad entre el tipo del agente y el esfuerzo a
realizar, entonces se genera una desinformacion. Dicha asimetrıa conlleva a que el principal
no pueda identificar apropiadamente a los tipos, y en el optimo ofrece a un grupo de
distintos tipos de agente un mismo set de transferencias.
34
Page 41
CAPITULO 5. RESULTADOS PRINCIPALES
5.3. Problema de diseno del principal
5.3.1. Condiciones necesarias de Optimalidad
El problema reformulado queda planteado como un ejercicio de control optimo. De manera
de expresarlo mas sencillamente se considera
π(e(θ), θ) =
[B(e(θ), θ)− ψ(e(θ))−
[pθ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
]1− F (θ)
f(θ)
]f(θ)
Lo primero que debe considerarse es la solucion de los esfuerzos a inducir optimos del
problema irrestricto, es decir, sin considerar la restriccion. Dicho optimo irrestricto se
define como:
eirre(θ) = arg maxe∈[e,e]
{π(e, θ)}
Ademas se define,
G(e(θ), θ) =pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
La solucion del problema dependera de las especificaciones funcionales de las probabili-
dades, funcion de costo y funcion de beneficio.
Afirmacion 3. El esfuerzo optimo sera el del problema irrestricto si este es permitida,
es decir si ∀θ se cumple eirre(θ) ≥ G(eirre(θ), θ).
Demostracion. Esto es directo desde los teoremas de optimizacion, pues la solucion irres-
tricta es factible. Es importante notar que en este caso el esfuerzo a inducir al agente de
tipo θ es igual al esfuerzo del primer mejor, mientras que a los de un tipo menor se les
induce un esfuerzo menor al del primer mejor.
Es importante mencionar que cuando la complementariedad del monitoreo, entre el tipo
y el esfuerzo es baja entonces mas probablemente la solucion del problema irrestricto
sera permitida. Esto es porque la desviacion doble en el esfuerzo no genera grandes ruidos
para el principal, en el sentido en que se puede generar un mecanismo de revelacion con
transferencias no planas. Se debe mencionar ademas que la solucion irrestricta no genera
distorisiones a los tipos mas altos, es por ello que interesa conocer el caso en que esta no
se puede implementar.
35
Page 42
CAPITULO 5. RESULTADOS PRINCIPALES
Proposicion 9. Se supone que no se puede implementar el esfuerzo irrestricto en todo el
soporte, sino solo en algunos tramos. En particular se considera un intervalo Θirre donde
se cumple que e?(θ) = eirre(θ) con sup{Θirre < θ}, entonces:
1. Para un intervalo de tipos inmediatamente superior a Θirre, digamos Θd se cumple
que e?(θ) < eirre(θ).
2. Para un intervalo de tipos inmediatamente superior a Θd, digamos Θu se cumple
que e?(θ) ≥ eirre(θ).
3. En Θd y Θu, se cumple que eirre(θ) es solucion de la ecuacion diferencial e?(θ) =
G(e?(θ), θ).
4. Para θ = inf{Θu}, se debe cumplir que eirre(θ) < G(eirre(θ), θ).
5. Si θ = inf{Θirre} > θ, entonces para un intervalo de tipos inmediatamente inferior
a Θirre se debe cumplir que e?(θ) > eirre(θ).
De manera de entender en terminos graficos se presenta el siguiente dibujo de la trayectoria
optima.
La curva azul corresponde a la curva de los esfuerzos irrestrictos, es decir en los cuales no
se considera la restriccion de pendiente. El color rojo representa los tramos donde la curva
de esfuerzos irrestrictos no cumple la restriccion de pendiente. La curva negra corresponde
a un ejemplo de la estructura de la curva optima. En este caso el intervalo Θirre = [θ3, θ2],
Θd = [θ2, θ1] y Θu = [θ1, θ]. Luego la secuencia se repite nuevamente.
36
Page 43
CAPITULO 5. RESULTADOS PRINCIPALES
Se consideran ahora los siguientes casos.
1. El primer caso a considerar es el representado en el siguiente grafico:
Se puede mostrar que la curva optima considera un tramo donde el esfuerzo optimo es
el irrestricto y para los tipos mas bajos, esta determinado por la ecuacion diferencial
propia de la restriccion.
2. El segundo caso a considerar es el siguiente:
En este caso no se puede recorrer la curva de esfuerzos irrestrictos, pues nunca
cumple la condicion de pendiente. La solucion es la curva que esta dada por la
ecuacion diferencial.
37
Page 44
CAPITULO 5. RESULTADOS PRINCIPALES
3. El tercer caso a considerar es el siguiente:
En este caso para los tipos mas altos no se puede recorrer la curva de esfuerzos
irrestrictos, pues no cumple la condicion de pendiente. La solucion es la curva negra
que comprende un tramo irrestricto y un tramo que resuelve a la ecuacion diferencial.
La solucion general detallada de este problema, que requiere de herramientas de control
optimo se muestra en el Anexo. Allı se explicitan tanto las condiciones necesarias como
las suficientes de la solucion del problema.
38
Page 45
CAPITULO 5. RESULTADOS PRINCIPALES
5.3.2. Estatica Comparativa
Se considera:
Π(e, b) =
∫ θ
θ
[B(e(θ), θ, b)− ψ(e(θ))−
1− F (θ)
f(θ)
ψe(e(θ))pθ(e(θ), θ)
pe(e(θ), θ)
]f(θ)dθ
Donde b es un parametro escalar, el cual cumple Bb,e(e(θ), θ, b) > 0. El problema queda
como sigue:
e?(b) = argmaxe∈E
{Π(e, b)}
Donde E = {e :[θ, θ]→ [e, e] diferenciable c.t.p., tal que ∀θ ∈
[θ, θ]
donde si es diferenciable entonces cumple que e ≥ G(e(θ), θ)}. Se define la relacion � tal
que si e1 � e2 entonces se cumple:
e1(θ) ≥ e2(θ) ∀θ ∈[θ, θ]
Se demuestra en el anexo que (E,�) es un sublattice. Por otro lado se demuestra tambien
que Π cumple con diferencias crecientes en (e, b) relativos a (�,≥), ademas de que es
supermodular en e relativo a �. Luego por el teorema de Topkis (Monotonıa en la Estatica
comparativa) se cumple que la funcion de esfuerzo a inducir es creciente en el parametro
b, es decir:
e?(b1) � e?(b2) ∀b1 ≥ b2
Ahora se considera la estatica comparativa para algun parametro de la funcion de costo de
esforzarse ψ(e). Si bien es cierto el conjunto E depende de dicho parametro puede hacerse
no depender si se supone ψ(e) = Af(e) pues G(e, θ) =pθ,eψe
peψe,e−pe,eψe. Realizando un cambio
de variable se obtiene el siguiente resultado:
e?(A1) � e?(A2) ∀A1 ≤ A2
Analogamente la funcion de esfuerzo crece a medida que se tiene un menor ratio
(1− F (θ)) /f(θ) ∀θ
En conclusion se tiene que a medida que el beneficio del principal aumenta para un mismo
esfuerzo, o bien el costo de esforzarse del agente disminuye, se tendra un mayor o igual
esfuerzo para todos los tipos de agente.
39
Page 46
CAPITULO 5. RESULTADOS PRINCIPALES
5.4. Ejemplo ilustrativo
Se desarrolla un modelo particular de manera de comparar la solucion en el caso en que se
considera solo Riesgo Moral, solo Seleccion Adversa y por ultimo Riesgo Moral y Seleccion
Adversa conjuntamente. En esta seccion se considera Bθ(e, θ) = 0, es decir, que el Beneficio
solo depende del esfuerzo. Este es el caso en que al principal solo le interesa el esfuerzo,
mientras que los distintos agentes tienen una habilidad privada en lograr mejores senales
en el monitoreo. Un ejemplo a considerar es una relacion laboral con vendedores, los cuales
mediante habilidades no observables θ pueden lograr mejores senales, aun cuando estas no
le interesan al principal, pues a el solo le interesa el esfuerzo en su funcion de beneficio. En
los casos del primer mejor, de tener solo Riesgo Moral y de tener solo Seleccion Adversa
el esfuerzo a inducir es solucion de Be(e(θ)) = ψe(e(θ)) , ∀θ ∈[θ, θ]. En particular se
considera la siguiente especificacion:
θ = 0 θ = 1
B(e) = 4e(2− e)
ψ(e) = e2
p(e, θ) = 0,2 +0,6e
2− θ
f(θ) =
1 si θ ∈ [0, 1]
0 en otro caso
Por lo tanto, el esfuerzo a inducir en los casos anteriores es el siguiente:
8(1− e) = 2e
Por lo tanto, el esfuerzo a inducir es e = 4/5 ∀θ ∈ [0, 1]. En el caso de tener Riesgo
Moral y Seleccion Adversa el esfuerzo irrestricto se obtiene de la siguiente ecuacion:
πe(e, θ) = 8(1− e)− 2e− (1− θ)4e
2− θ= 0
Por lo tanto, el esfuerzo irrestricto es:
eirre(θ) =8(2− θ)
10(2− θ) + 4(1− θ)=
16− 8θ
24− 14θ
40
Page 47
CAPITULO 5. RESULTADOS PRINCIPALES
deirre(θ)
dθ=
−8(24− 14θ) + 14(16− 8θ)
[24− 14θ]2=
32
[24− 14θ]2
Por otro lado,
G(eirre(θ), θ) =eirre(θ)
2− θ=
16− 8θ
(24− 14θ)(2− θ)
Por lo tanto:
deirre(θ)
dθ−G(eirre(θ), θ) =
32(2− θ)− [24− 14θ] (16− 8θ)
[24− 14θ]2 (2− θ)=
−320 + 384θ − 112θ2
[24− 14θ]2 (2− θ)
Dicha expresion es negativa ∀θ ∈ [0, 1]. Por lo tanto, no es posible implementar el esfuerzo
irrestricto en ningun intervalo. Luego el esfuerzo a inducir es el dado por la restriccion de
pendiente. La ecuacion diferencial es la siguiente:
de
dθ= G(e, θ) =
e
2− θ
de
e=
dθ
2− θ
log(e) = −log(2− θ) + Cte
e =Cte
2− θ
De acuerdo a lo senalado en el Anexo, la Cte se encuentra de la condicion y(θ) = y(θ) = 0,
que implica que: ∫ 1
0
πe
(Cte
2− θ, θ
)e∫Ge(e,s)dsdθ
=
∫ 1
0
πe
(Cte
2− θ, θ
)1
2− θdθ
=
∫ 1
0
8
2− θdθ −
∫ 1
0
10Cte
(2− θ)2dθ −
∫ 1
0
10Cte(1− θ)
(2− θ)3dθ
= 8Log [2]− 10Cte1
2− 4Cte
1
8= 0
Por lo tanto Cte = 8Log[2]5,5
≈ 1. Se puede observar que el esfuerzo e(θ = 1) = Cte2−1
= Cte =
1 > 45y que e(θ = 1) = Cte
2−0= Cte
2= 1
2< 4
5. Por lo tanto la incorporacion de riesgo
moral y seleccion adversa simultaneamente distorsionan los esfuerzos tanto de los tipos
altos exigiendo un mayor esfuerzo, como de los tipos bajos permitiendo un menor esfuerzo.
41
Page 48
CAPITULO 5. RESULTADOS PRINCIPALES
Lo que intuitivamente pasa es que dado que no se puede exigir el primer mejor a los
agentes de tipo mas bajos, se sobre exige esfuerzo a los mejores tipos, subsidiando la in-
productividad de los agentes mas bajos.
Desde el punto de vista de transferencias, para los casos del primer mejor, se les otorga un
bono decreciente en el tipo de manera de generar el mismo esfuerzo para todos. Mientras
que para cuando se tiene seleccion adversa y riesgo moral se les otorga un mismo bono
para todos los tipos. Y esto es basicamente porque no se puede otorgar esfuerzo decre-
ciente por la autoseleccion, considerando la doble desviacion antes mencionada.
Es interesante notar que la interaccion de ambas asimetrias genera ineficiencias (diferen-
cias con el primer mejor) y no cada una por si sola. Este resultado es importante, pues
senala que no incluir un problema de asimetrıa en particular, puede generar resultados
inadecuados. Esto es particularmente interesante, ya que en muchas ocasiones por simpli-
cidad o para tener un manejo sencillo de ecuaciones, no se considera el problema riesgo
moral o el de seleccion adversa.
42
Page 49
CAPITULO 5. RESULTADOS PRINCIPALES
5.5. Extensiones: Supuesto de senales discretas
En esta seccion se analiza la importancia de que la senal sea binaria, condicionando al
pago en cada uno de estos dos escenarios (good o bad).
5.5.1. Senal continua
Se supone un modelo donde la senal es continua, y se tiene que la probabilidad de que
se de la senal y ∈ [a, b] dado de que el agente es de tipo θ y realiza un esfuerzo e, es
ρ(y|θ, e(θ)). Se cumple por lo tanto que∫ baρ(y|θ, e(θ))dy = 1. Otras condiciones que se
cumple en esta funcion densidad son:
1 ρe(y|θ, e) es no decreciente en y, y ademas cambia de signo.
2 ρθ(y|θ, e) es no decreciente en y, y ademas cambia de signo.
3 ρe,e(y|θ, e) es no creciente en y, y ademas cambia de signo.
4 ρe,θ(y|θ, e) es no decreciente en y, y ademas cambia de signo.
Por otro lado, el principal ofrece un contrato implementable que considera una funcion
de transferencias v(y, θ) en el caso de tener una senal y para el agente de tipo θ ∈[θ, θ],
y una funcion de esfuerzo e(θ).
5.5.2. Equivalencia de ambos modelos
Definicion 3. Se define la funcion de corte y0(θ) :[θ, θ]→ IR tal que ∀θ cumple:
∫ b
a
ρe(y|θ, e(θ))v(y, θ)dy
∫ b
y0(θ)
ρθ(y|θ, e(θ))dy =
∫ b
a
ρθ(y|θ, e(θ))v(y, θ)dy
∫ b
y0(θ)
ρe(y|θ, e(θ))dy
Si la senal continua cumple que y ≥ y0(θ) entonces se considera que el resultado es good
para el agente de tipo θ. En caso contrario y < y0(θ) entonces se considera que el resultado
es bad para el agente de tipo θ.
Supuesto 1. Se asume que ∃y0(θ) ∈ ]a, b[ ∀θ ∈[θ, θ].
Definicion 4. Se define p(e, θ, y) =∫ byρ(y|θ, e)dy como la probabilidad de tener una senal
superior a y0(θ), caso en el cual se paga wg(θ) al agente de tipo θ. En caso contrario se
paga wb(θ).
43
Page 50
CAPITULO 5. RESULTADOS PRINCIPALES
Se puede observar que p(e, θ, y) hereda ciertas propiedades debido a los supuestos sobre
la funcion ρ(y|θ, e). Todas las propiedades surgen a partir del siguiente procedimiento:
∫ b
a
ρ(y|θ, e)dy = 1
Diferenciando por e se obtiene:
∫ b
a
ρe(y|θ, e)dy = 0
Luego si se considera y ∈ ]a, b[ y se utiliza la propiedad 1 de la funcion de densidad ρ se
tiene que:
pe(e, θ, y) =
∫ b
y
ρe(y|θ, e)dy > 0
El mismo procedimiento se puede realizar diferenciando por θ, o bien por doble diferen-
ciacion en e y e, y en e y θ. De esta manera se logran las propiedades basicas del modelo
de senal binaria.
Supuesto 2. Se realiza el siguiente supuesto de manera de asegurar las condiciones su-
ficientes de la proposicion que senala la equivalencia entre el monitoreo a senal continua
y a senal discreta. Se debe cumplir que ∀θ ∈[θ, θ]la expresion
[p(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)− p
(e(θ), θ, y0(θ)
)] ddθ
[ψe(e(θ))
pe(e(θ), θ, y0(θ))
]
+[−ρ(y0(θ)|e
?(θ, wg(θ), wb(θ)), θ)+ ρ
(y0(θ)|e(θ), θ
)]y0(θ)
ψe(e(θ))
pe(e(θ), θ, y0(θ))
es estrictamente positivo ∀θ < θ y estrictamente negativo ∀θ > θ.
Acerca de este supuesto se debe mencionar que no se considera restrictivo por el si-
guiente argumento. Utilizando las propiedades heredadas de p(e, θ, y), se ha demostrado
previamente que:
[p(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)− p
(e(θ), θ, y0(θ)
)] ddθ
[ψe(e(θ))
pe(e(θ), θ, y0(θ))
]
es no creciente en θ. El segundo sumando del supuesto genera mayor incertidumbre
por lo que sera necesario verificar en cada caso. Pues si bien es cierto se cumple que
44
Page 51
CAPITULO 5. RESULTADOS PRINCIPALES
ψe(e(θ))/pe(e(θ), θ, y0(θ)) > 0, no se tiene certeza de lo que sucede con y0(θ) ni con el
factor restante. Esto es principalmente porque depende de las funciones que se estan
considerando. Luego se prueba la siguiente proposicion.
Proposicion 10. Se supone que el principal puede ofrecer un contrato (digamos 1) que
otorga un pago de v(y, θ) para cada senal y que induce un esfuerzo e(θ). Luego existe un
contrato (digamos 2) definido como (wg(θ), wb(θ), e(θ)) (es decir, binario en la senal y
con la misma funcion de esfuerzo) que tambien es implementable y ademas en terminos
esperados es igual de costoso para el principal.
Demostracion. Se define I(e(θ), θ) =∫ baρ(y|θ, e(θ))v(y, θ)dy. Luego se define el contrato
2 como:
wg(θ) = I(e(θ), θ) + (1− p(e(θ), θ, y0(θ)))Ie(e(θ), θ)
pe(e(θ), θ, y0(θ))
wb(θ) = I(e(θ), θ)− p(e(θ), θ, y0(θ))Ie(e(θ), θ)
pe(e(θ), θ, y0(θ))
Primero se puede observar que el contrato 2 en terminos esperados es igual de costoso
que el contrato 1. De hecho ambos cuestan en terminos esperados I(e(θ), θ). Segundo se
puede verificar que el contrato 2 cumple con compatibilidad de incentivos del esfuerzo. Se
puede mostrar que wg(θ)−wb(θ) = Ie(e(θ), θ)/pe(e(θ), θ, y0(θ)). Por otro lado se tiene que
debido a compatibilidad de incentivo del contrato 1, que Ie(e(θ), θ) = ψe(e(θ)). Y por lo
tanto wg(θ)− wb(θ) = ψe(e(θ))/pe(e(θ), θ, y0(θ)). La condicion de segundo orden es:
(wg(θ)− wb(θ)) pe,e(e, θ, y0(θ))− ψe,e(e) ≤ 0 ∀e
Queda demostrar que el contrato 2 cumple con compatibilidad de incentivos en seleccion
adversa. Para ello debe cumplir que:
θ ∈ argmaxθ
{U(θ, wg(θ), wb(θ))}
Donde,
U(θ, θ) = wg(θ)p(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)+ wb(θ)
(1− p
(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
))
−ψ(e?(θ, wg(θ), wb(θ))
)
= I(e(θ), θ)− ψ(e?(θ, wg(θ), wb(θ))
)
+(p(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)− p
(e(θ), θ, y0(θ)
)) ψe(e(θ))
pe(e(θ), θ, y0(θ))
45
Page 52
CAPITULO 5. RESULTADOS PRINCIPALES
Luego se puede encontrar la expresion de Uθ(θ, wg(θ), wb(θ)).
Uθ(θ, θ) =
(Ie(e(θ), θ)− ψe(e(θ))
)e(θ)
+ Iθ(e(θ), θ)− pθ
(e(θ), θ, y0(θ)
) ψe(e(θ))
pe(e(θ), θ, y0(θ))
+(pe
(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)(wg(θ)− wb(θ))− ψe(e
?(θ, wg(θ), wb(θ))))
∗de?(θ, wg(θ), wb(θ))
dθ
+(p(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)− p
(e(θ), θ, y0(θ)
)) d
dθ
[ψe(e(θ))
pe(e(θ), θ, y0(θ))
]
+(−ρ(e?(θ, wg(θ), wb(θ)), θ, y0(θ)
)+ ρ
(e(θ), θ, y0(θ)
))y(θ)
ψe(e(θ))
pe(e(θ), θ, y0(θ))
Se puede observar que el primer sumando es cero ∀θ por la condicion de primer orden de
la compatibilidad de incentivos de riesgo moral. Por otro lado se puede observar que:
Iθ(e(θ), θ) =
∫ b
a
ρθ(y|θ, e(θ))v(y, θ)dy +
∫ b
a
ρ(y|θ, e(θ))vθ(y, θ)dy
Pero por compatibilidad de incentivos en el sentido de seleccion adversa del contrato 1)
se tiene que: ∫ b
a
ρ(y|θ, e(θ))vθ(y, θ)dy = 0
Luego el segundo sumando es cero ∀θ por la definicion de y0(θ). El tercer sumando es cero
por definicion de e?(θ, wg(θ), wb(θ)) ∀θ, θ. El cuarto y el quinto sumando dependeran del
valor de θ. La condicion de primer orden, es decir, Uθ(θ, wg(θ), wb(θ))|θ=θ = 0, se cumple
porque se tiene que e?(θ, wg(θ), wb(θ)) = e(θ). Con respecto a la condicion suficiente, se
considera el supuesto el cual senala que el punto crıtico θ = θ es maximo global.
46
Page 53
CAPITULO 5. RESULTADOS PRINCIPALES
5.5.3. Ejemplo
Se consideran las siguientes funciones:
ψ(e) = e2
ρ(y|θ, e) = 1 + eθ (y − 0,5)
La funcion de distribucion anterior implica que la probabilidad de una senal buena en el
mundo binario es:
p(e, θ) = (1− y)(1 + 0,5eθy)
Donde y es el corte de la senal en el mundo continuo.
Un contrato implementable en el mundo continuo, debe cumplir las siguientes condiciones:
e(θ) ∈ argmaxe
{I(e, θ)− ψ(e)}
θ ∈ argmaxθ
{I(e?(θ, θ), θ)− ψ(e?(θ, θ))}
Un contrato en particular que cumple dichas condiciones es el siguiente:
e(θ) = θ2
v(y, θ) = −θ4
2− 12θ + 24yθ
Aplicando el teorema de cambio de mundo, se puede encontrar un contrato
e(θ) = θ2
wg(θ) = −0,5θ4 +4θ
1− y
wb(θ) = −0,5θ4 −4θ
y
Dicho contrato se conforma para cualquier funcion y(θ). En particular se asume que la
funcion es constante, ya que para cualquier valor cumple el supuesto 1. En dicho caso, la
expresion del supuesto 2 es 2θ(θ2 − θ2) y por lo tanto cumple dicho supuesto. Con esto
se muestra que un contrato en el mundo de senal continuo, puede ser redisenado en un
mundo de senal binario.
47
Page 54
CAPITULO 5. RESULTADOS PRINCIPALES
5.5.4. Senal discreta
Se debe mencionar ademas que el caso de senal discreta y no binaria, es decir donde
las senales son 1, 2, ..., n, puede ser capturado por el modelo con senal continua. Para
ello se supone que se tiene n funciones de probabilidades que suman 1, definidas como
pk(e, θ), ademas de las transferencias vi(θ) para cada senal i ∈ {1, 2, .., n}. Primero debe
reordenarse y redefinir el subındice de manera de que las senales cumplan la propiedad
de monotono ratio de maxima verosimilitud (MLRP). Luego se define ρ(y|e, θ) de manera
de que se ajusten las senales discretas a las senales continuas, esto es:
ρ(y|e, θ) =n
b− api(e, θ) ∀y ∈
(a + (i− 1)
b− a
n, a+ i
b− a
n
)∀i ∈ {1, 2, .., n}
Bajo esta definicion se puede notar que la funcion de densidad ρ hereda las propiedades
de las probabilidades. Por otro lado, la funcion ρ definida no es continua en y, lo que en
rigor no causa ningun problema en el modelo continuo. Luego se considera, en terminos
nominales, que la senal es i cuando y ∈(a + (i− 1) b−a
n, a+ i b−a
n
). En dicho caso debera,
por lo tanto, pagarse vi(θ). De esta manera se construye la funcion de pagos en el mundo
de senal continua de la siguiente manera:
v(y, θ) = vi(θ) ∀y ∈ [yi(e, θ), yi+1(e, θ)] ∀θ ∀i
Ası se recupera el caso de senal continua, mas aun, el resultado se puede obtener de forma
mas general, por lo que se considera que la definicion de las funciones ρ y v se pueden
manejar de manera de que sean mas probable cumplir las condiciones de la proposicion y
por ende sea mas facil cambiarse al mundo binario.
Lo importante es considerar una senal continua y en el monitoreo, pues con dicha senal se
podra encontrar el corte y0(θ). En caso de no encontrar dicha variable continua latente,
debera coincidir y0(θ) con i, lo cual a priori es exigente como condicion. Sin embargo
es importante mencionar que en el ejemplo antes mencionado, no se tiene este problema
porque y(θ) se puede definir arbitrariamente.
48
Page 55
Capıtulo 6
Aplicaciones
6.1. Aplicacion 1: Tipos de Contratos
6.1.1. Motivacion
En ocasiones la coordinacion entre agente y principal se vuelve demasiado costosa, y por
lo tanto el excedente total de la relacion disminuye demasiado. Es por ello que tiene sen-
tido considerar el caso en que el principal vende la firma al agente, y ası se pierden las
distorsiones propias de la relacion asimetrica. Es por ello que se desea estudiar la conve-
niencia del principal de realizar un contrato de incentivos o uno de venta, dependiendo de
la complementariedad del tipo y esfuerzo.
Para este analisis se utiliza la herramienta desarrollada anteriormente. En particular, se
consideran los siguientes supuestos:
B(e, θ) = 4e (2− e + θα)
ψ(e) = e2
Se puede observar que Be,θ(e, θ) = α representa la complementariedad de las variables
esfuerzo y tipo.
49
Page 56
CAPITULO 6. APLICACIONES
6.1.2. Contrato de venta
En el caso de que el principal vende la firma al agente, entonces se tiene que el agente
realiza el esfuerzo primer mejor.
Se define la utilidad del primer mejor para un agente de tipo θ como:
V (θ) = maxe
[B(e, θ)− ψ(e)]
La condicion de primer orden senala que:
(2− 2e+ θα) 4− 2e = 0
Y por lo tanto:
V (θ) =4(2 + αθ)2
5
Dicha utilidad es lo maximo que puede pagar un agente de tipo θ.
El principal vendera a un precio a todos los agentes con un tipo mayor que a que depende
de la complementariedad entre el tipo y el esfuerzo Be,θ = α > 0.
Si se supone que los agentes se distribuyen uniforme, por lo tanto F (θ) = θ con θ ∈ [0, 1],
se cumple que:
θ?(α) = argmaxθ
[V (θ)(1− F (θ))] = maxθ
[4(2 + αθ)2
5(1− θ)
]
Los tipos mas altos quedaran con una renta positiva debido a la asimetrıa, ya que revelan
un tipo menor al real. El principal debera vender a un precio menor de manera de lograr
la venta con una mayor probabilidad.
Se obtiene que:
θ?(α) =
2(α−1)3α
si α > 1
0 si α ≤ 1
Por lo tanto:
V (θ?(α)) =
16(2+α)2
45si α > 1
165
si α ≤ 1
Y la utilidad esperada del principal es:
V (θ?(α)) (1− F (θ?(α))) =
16(2+α)4
405α2 si α > 1
165
si α ≤ 1
50
Page 57
CAPITULO 6. APLICACIONES
6.1.3. Contrato de incentivos
La utilidad del principal para un esfuerzo y tipo determinado es la siguiente:
π(e, θ) = 4 (e(2− e) + eθα)− e2 −2e2(1− θ)
2− θ
La utilidad marginal en el esfuerzo es:
πe(e, θ) = 4 (2− 2e+ θα)− 2e−4e(1− θ)
2− θ
Luego el esfuerzo irrestricto (sin considerar la restriccion de pendiente) es:
eirre(θ) =8 + 4θα
10 + 4(1−θ)2−θ
Dependiendo de la complementariedad se pueden tener tres situaciones.
1. Si la complementariedad α < 0,83 entonces se cumple que deirre(θ)dθ
< G(eirre(θ), θ)
∀θ ∈ [0, 1]. Esta condicion es necesaria para que el esfuerzo sea solucion de dedθ
=
G(e, θ), por lo tanto e(θ) = Cte2−θ
. Si se impone que y(1) = y(0) = 0 se obtiene el
valor de la constante Cte que en este caso es:
Cte =4(ln(4)(1 + α)− α)
5,5
En este caso se tienen distorsiones a los agentes de mayor tipo, pues eFB(1) < e?(1).
2. En el caso en que α > 3 se obtiene que deirre(θ)dθ
≥ G(eirre(θ), θ) ∀θ ∈ [0, 1]. Dicha
condicion asegura que la solucion irrestricta sea factible. El esfuerzo irrestricto se
obtiene de la condicion πe(e, θ) = 0, obteniendose:
e(θ) = eirre(θ) =(2− θ)(8 + 4αθ)
2(12− 7θ)
En este caso se obtiene que no hay distorsiones a los agentes de mayor tipo, pues se
cumple que eFB(1) = e?(1).
3. El ultimo caso a considerar es cuando cumple que α ∈ [0,83, 3]. Para este caso se
tiene que eventualmente la solucion sera pegada a la ecuacion diferencial, ya sea
completamente tal como el primer caso, o parcialmente.
51
Page 58
CAPITULO 6. APLICACIONES
En particular se considera el caso α = 2, donde se cumple que:
deirre(θ)
dθ−G(eirre(θ), θ)
< 0 si θ > 0,766077
≥ 0 siθ ≤ 0,766077
Luego se grafica la funcion:
∫ θ
θ
πe(eirre(θ)(2− θ)
2− s, s) exp
∫ s
θGe(e(p),p)dp ds
Donde exp∫ θ
θGe(e(s),s)ds = exp
∫ θ
θ1
2−θds = exp−ln(2−θ) = 1
2−θ.
Dicha expresion es el signo del multiplicador y(θ). En el caso en que se anule la
expresion en θ0, indica que la solucion es la siguiente:
e?(θ) =
eirre(θ) si θ ≤ θ0eirre(θ0)(2−θ0)
2−θsiθ > θ0
En el caso particular de α = 2, se tiene que θ0 = 0,648446 < 0,766077 y por lo
tanto, en [0,648446, 1] el esfuerzo a inducir, sigue la ecuacion diferencial.
En este caso tambien se tienen distorsiones a los agentes de mayor tipo, pues
eFB(1) < e?(1).
52
Page 59
CAPITULO 6. APLICACIONES
6.1.4. Conclusion
Se pueden graficar las utilidades del principal para cada tipo de contrato, en funcion de
la complementariedad entre el esfuerzo y el tipo.
Se puede observar que si la complementariedad α < 0,250962, entonces al principal le
convendra vender la firma. Mientras que para una complementariedad α ≥ 0,250962 es
preferible para el principal implementar un contrato de incentivos.
En el caso de vender la firma se logra eficiencia, pues el agente que compra realiza el
esfuerzo del primer mejor. Ademas se le ceden rentas informacionales a los agentes, pues
al momento de vender no se conoce el tipo.
En el caso de ejercer un contrato de incentivos no se logra eficiencia, pues las asimetrıas
de informacion inducen costos sociales.
53
Page 60
CAPITULO 6. APLICACIONES
6.2. Aplicacion 2: Acumulacion de capital humano
6.2.1. Introduccion
En un modelo de capital humano, el principal es el empleador, quien posee poca infor-
macion sobre las calidades y comportamientos de sus empleados actuales o potenciales a
contratar, pero quien tiene en su potestad la posibilidad de disenar las reglas de juego
en la interaccion. Los agentes son los empleados quienes poseen informacion privada y no
tienen de entrada incentivos para revelarla.
En los equilibrios de tipo pooling, los perjudicados poseen incentivos para senalizar su
mayor capacidad o su mejor calidad en el trabajo. Por ejemplo, la educacion puede de-
sempenar este tipo de papel de mecanismo de revelacion (Spence, 1974). Buena parte de
la problematica consiste en que las senales deben ser creıbles por los principales o por los
individuos menos informados en el mercado y el mecanismo de funcionamiento es tal que
el coste de oportunidad de obtener un tıtulo o un grado educativo debe ser menor para
aquellos con mayores capacidades y mejor desempeno para el mercado laboral.
Estudios realizados en las escuelas del comportamiento en las teorıas organizacionales han
mostrado que existen mecanismos de control social entre empleados que conducen a que
la productividad marginal del trabajo se equipare en los trabajadores de areas de trabajo
en talleres. Las nuevas formas de contratacion laboral y la posibilidad de realizar el tra-
bajo por fuera de las instalaciones de las empresas han conducido a que la identificacion
de categorıas sea cada vez mayor en la conformacion de equilibrios separadores. Por otra
parte, la abundancia de mano de obra disponible con las calidades mınimas para realizar
el trabajo ha conducido al buscar un equilibrio pooling que se ubica por encima de la
productividad marginal eficiente que se equipararıa con el ingreso marginal. Esto es lo-
grado mediante la busqueda de la maxima productividad de corto plazo, bajo presion y
amenaza de los principales hacia los agentes en la cual se les incita a trabajar en exceso
con argumentos tales como la preservacion del trabajo en un horizonte mayor, o con el
desconocimiento sistematico de la calidad que el empleado realiza en el trabajo (lo que
conduce a los empleados a esmerarse mas y aumentar su productividad de corto plazo).
54
Page 61
CAPITULO 6. APLICACIONES
6.2.2. Objetivos
Se desea saber cuales serian las razones que harıan que el agente tenga incentivos a acu-
mular capital humano. Ademas se desea encontrar estaticas comparativas relevantes sobre
la distribucion del capital humano.
6.2.3. Esquema del Juego
El modelo aplicado consta de tres periodos.
Primer periodo (t = 0): En el primer periodo el agente escoge su nivel de capital
humano H ∈[H,H
].
Segundo periodo (t = 1): En el segundo periodo, el principal disena el contrato que
le ofrecera a cada agente.
Tercer periodo (t = 2): Finalmente el agente decide si trabajar o no, dado el sis-
tema de remuneraciones planteado por el principal. Luego en el trabajo se esfuerza
e ∈ [e, e].
6.2.4. Modelo
Las utilidades del agente son:
U(e,H, wg, wb) = −c(H) + β [p(e,H)u(wg) + (1− p(e,H))u(wb)− ψ(e)]
Donde c(H) es la inversion para el agente de acumular un nivel de capital humano H de-
sconocido por el principal, el factor β es un descuento temporal, p(e,H) es la probabilidad
de lograr un buen resultado dado de que el agente tiene un nivel de capital humano H y
realiza un esfuerzo laboral e y finalmente se define ψ(e) como el costo de esforzarse e.
Se supone que la inversion es creciente en la acumulacion de capital humano especıfico.
CH(H) > 0, ∀H
La resolucion del tercer y cuarto periodo son a partir de los resultados encontrados en la
seccion anterior. Pero antes los agentes deben escoger su nivel de capital humano. De esta
manera la creencia del principal acerca de la distribucion de los tipos, sera endogena.
55
Page 62
CAPITULO 6. APLICACIONES
Luego se puede verificar que la renta informacional otorgada al agente de tipo H es:
Renta(H) =
∫ H
H
[pH(e
optimo(S), S)ψe(eoptimo(S))
pe(eoptimo(S), S)
]dS
Y marginalmente se define la renta marginal como:
dRenta(H)
dH=pH(e
optimo(H), H)ψe(eoptimo(H))
pe(eoptimo(H), H)≡ φ(eoptimo(H), H)
Esfuerzo irrestricto
Si la funcion densidad de los tipos es tal que el esfuerzo irrestricto es factible, es decir,
eoptimo(H) = eirre(H), la cual depende del ratio de maxima verosimilitud definido como
h(H) = (1− F (H)) /f(H), y por lo tanto denotaremos (abusando la notacion) como
eoptimo(H) = eirre(H, h(H)).
Ahora se analiza la decision del tipo del agente en el periodo inicial.
La funcion que maximiza el agente, por induccion reversa es:
U(e,H, wg, wb) = −c(H) + β [p(e,H)u(wg) + (1− p(e,H))u(wb)− ψ(e)]
= −c(H) + β
[U0 +
∫ H
H
[pH(e
irre(S, h(S)), S)ψe(eirre(S, h(S)))
pe(eirre(S, h(S)), S)
]dS
]
El equilibrio planteado esta basado en el concepto de no arbitraje, pues se considera que
U(H) es constante. Luego se cumple la condicion de no arbitraje.
c′(H) = βφ(eirre(H, h(H)), H)
A partir de esta condicion y utilizando el teorema de la funcion implıcita, se puede llegar
a encontrar la funcion de distribucion de los tipos de los agentes.
En este caso se consideran las siguientes especificaciones:
B(e,H) = e (2− e+BH)
ψ(e) = e2
p(e,H) = ae + AeH
C(H) =K
2H2
56
Page 63
CAPITULO 6. APLICACIONES
Con dichas expresiones se puede encontrar la forma funcional del ratio de maxima verosimil-
itud, esto es si se supone que el esfuerzo irrestricto es factible. Luego se verifica que se
cumple la restriccion de pendiente del esfuerzo.
Se realiza un grafico para los valores a = 0,2, A = 0,4 de la distribucion del capital
humano, y muestra que la disminucion del costo en inversion es sustituta a aumentar la
complementariedad de los esfuerzos.
En el caso base se considera la distribucion de tipos con B = 4 y K = 5. Ademas se
considera el caso donde se tiene una mayor complementariedad (B = 6) y luego el caso
donde hay menor costo de inversion (K = 3) con respecto al caso base.
Se puede observar que la complementariedad del esfuerzo y el capital humano es conside-
rada como el grado de utilidad que tiene el capital humano en el trabajo especifico que se
esta realizando. Ademas se muestra que endogenamente se tiene una menor distribucion
de tipos alto.
Cabe senalar que el anterior, es un equilibrio donde se considera que el esfuerzo irrestricto
es factible, lo cual debe verificarse.
57
Page 64
CAPITULO 6. APLICACIONES
Esfuerzo restringido
Si se considera que el esfuerzo irrestricto nunca es factible y por lo tanto el esfuerzo optimo
esta dado por la restriccion de pendiente, entonces la funcion de esfuerzo no depende de
la distribucion directamente sino solo en la condicion inicial de la ecuacion diferencial.
Se debe recordar que en el caso de que el esfuerzo siga la restriccion de pendiente activa-
mente significa que las transferencias seran las mismas para todos los distintos tipos de
agentes.
En este caso la ecuacion diferencial considerada en la restriccion de pendiente es:
de(H)
dH=
Ae
a + AH
Y por lo tanto se obtiene que el esfuerzo es:
e(H) = C(a+ AH)
Debido a las condiciones necesarias (multiplicador igual a cero) debe cumplirse que:
C =
∫ 1
0(a+ AH)(BH + 2)f(H) dH
∫ 1
0(a+ AH)f(H)(4(a+ AH) + 4Ah(H)) dH
Por otro lado se tiene que,
φ(e(H), H) =2A (C(a+ AH))2
a+ AH
Y por lo tanto el nivel de capital humano que escoge el agente, surge de resolver el siguiente
problema:
maxH{−K
2H2 + β2AC2(a+ AH)}
En este caso se concentran puntualmente todos los agentes, en H = 2aAC2
K−2A2C2 . Luego
no hay problema de seleccion adversa y la restriccion no es activa, lo que contradice el
supuesto inicial. Luego no hay equilibrio.
58
Page 65
CAPITULO 6. APLICACIONES
6.2.5. Juego Repetido
Otro equilibrio que se plantea, sin suponer una optimizacion del agente en una etapa
inicial, es considerar un juego repetido donde el tipo del agente se refiere a la productividad
del trabajador. Se supone que el tipo del periodo t depende del tipo del periodo t − 1 y
del esfuerzo que ejercio. Mas fuerte aun se considera lo siguiente formula de actualizacion
del tipo del agente:
θt = λe?(θt−1) + (1− λ)θt−1
Esto es porque la productividad se actualiza en cada periodo dependiendo del desempeno
del agente. Si en un periodo en particular el agente decide realizar un esfuerzo bajo
entonces afectara su productividad de los periodos siguientes. El valor de λ senala la
persistencia de la productividad y el peso del ultimo esfuerzo en la actualizacion. Si se
considera el estado estacionario se considera entonces que θt = θ ∀t. En terminos practicos
se debe resolver un punto fijo e?(θ) = θ.
Por simplicidad se considera solo el caso en que el esfuerzo irrestricto es permitido, es
decir se cumple e?(θ) = eirre(θ). La ecuacion de punto fijo queda:
(a+ Aθ)(2 +Bθ)
4(a+ Aθ + Ah(θ))= θ
Y despejando la funcion de maxima verosimilitud, queda:
h(θ) =2a− 4aθ + 2Aθ + aBθ − 4Aθ2 + ABθ2
4Aθ
Si se consideran los siguientes parametros a = 0,2 y A = 0,6, entonces se obtienen las
siguientes funciones de densidad para los distintos valores de la complementariedad (B)
entre la productividad y el esfuerzo.
59
Page 66
CAPITULO 6. APLICACIONES
6.2.6. Comentarios
Como idea intuitiva se senala que si la productividad marginal del esfuerzo (Be) es may-
or y por tanto, aumentan los incentivos a inducir mayores esfuerzos, entonces la renta
marginal del agente aumentara tambien (pues se demuestra φe > 0). Luego es necesario
que el ratio de maxima verosimilitud aumente para ese tipo, pues de(H, h(H))/dh(H) < 0.
Luego aumenta la masa de tipos mas altos.
En este sentido, se cree que el modelo entrega una herramienta valiosa, en la cual endogena-
mente se pueden encontrar equilibrios interesantes en la distribucion del capital humano,
si se consideran especificaciones particulares. Ademas se cree que es facil a partir de la
aplicacion antes mencionada, analizar la sensibilidad del equilibrio, y distribucion de los
tipos en la complementariedad de el esfuerzo y el tipo. Esto es importante pues dicha
variable puede ser interpretada como el tipo de capital humano. Si la complementariedad
es alta, entonces se estima que el capital humano desarrollado es especifico. Mientras que
si la complementariedad es baja, entonces se interpreta como que el capital humano de-
sarrollado es general, y presenta solo caracterısticas de senalizacion.
El resultado principal encontrado con este modelo es que como polıtica, debiese ser igual-
mente importante al aumento de la cobertura educacional a la eficiencia del capital hu-
mano desarrollado, es decir, que los estudios sean utiles en el futuro laboral.
De todas maneras se cree que se puede ahondar mas en temas de complementariedad
sobretodo en el caso en que el irrestricto no es factible.
Para el caso del juego repetido, se obtiene que a medida que se tiene un mayor nivel
de B, aumenta la masa de agentes mas productivos. En este sentido los resultados son
equivalentes al equilibrio planteado en el juego anterior, salvo que el hecho de que el juego
sea repetido, hace que en este caso la sensibilidad de la productividad sea mucho mayor
al parametro.
60
Page 67
Capıtulo 7
Conclusiones
Se estudia un modelo de agente-principal en que el agente realiza un esfuerzo no obser-
vable y posee informacion privada sobre la tecnologıa de monitoreo. El primer resultado
adopta tecnicas de diseno de mecanismos (Myerson 1981) para caracterizar la familia
de contratos implementables. Los pagos contingentes al resultado del monitoreo, quedan
completamente determinados a partir de la funcion de esfuerzo que el principal propone
al agente. Se muestra que un contrato es implementable si y solo si el perfil de esfuer-
zos asociado es diferenciable casi en todas partes y su derivada es mayor o igual a una
funcion lineal de la complementariedad en el monitoreo. Esta condicion, que se le llama
restriccion de doble desviacion, captura la posibilidad que tiene el agente de decidir un
esfuerzo optimo contingente a cualquier contrato ofrecido en el menu. Una implicancia
de este resultado es que un perfil de esfuerzos implementable es estrictamente creciente
en el tipo del agente y ası, contratos pooling no pueden implementarse. Al contrario de
Myerson (1981) donde la restriccion que surge de la implementacion no es activa, la doble
desviacion tiene fuertes implicancias en el diseno del menu de contratos optimos, pues
genera distorsiones no triviales.
Para entender este resultado, se supone que se puede implementar un esfuerzo constante
sobre algun intervalo. Luego, el poder de los contratos ofrecidos a los tipos mas bajos debe
ser mayor estricto que el ofrecido a los tipos mas altos pues, de otra manera, los tipos ba-
jos se esforzarıan menos que los altos. Pero en este caso, los tipos altos preferirıan hacerse
pasar por tipos bajos de modo tal de enfrentar contratos de alto poder y obtener pagos mas
altos. Se sigue que necesariamente los esfuerzos deben ser estrictamente crecientes para
poder ser implementados en la presencia de riesgo moral y seleccion adversa. Es sensato
pensar ademas que a medida que la complementariedad del esfuerzo y el tipo aumenta, en-
tonces la condicion se vuelve mas restrictiva, pues el efecto de la doble desviacion aumenta.
61
Page 68
CAPITULO 7. CONCLUSIONES
Con la caracterizacion anterior, se plantea el problema del principal como un problema
de control optimo. Usando tecnicas de estatica comparativa robusta, se muestra como se
pueden derivar propiedades de manera simple e intuitiva. Se plantea ademas las condi-
ciones necesarias de Pontryagin para caracterizar las soluciones del problema del principal.
Se ilustra como la combinacion de riesgo moral y seleccion adversa determinan la forma
de los menus de contratos optimos y causan ineficiencias considerando un simple modelo,
en el que la senal sobre la que se contrata no es directamente productiva, sino que es
monitoreo puro. Por ejemplo si se considera el caso de un vendedor de tienda en donde
el tipo es la capacidad que puede lograr mejores transferencias trampeando el monitoreo
y no logrando mayores beneficios para el principal. En este contexto, si bien el esfuerzo
o el tipo es no verificable, el principal puede alcanzar el primer mejor usando contratos
de incentivos de poder creciente. Es decir, cuando hay solo seleccion adversa o solo riesgo
moral, la asimetrıa de informacion no tiene costos para el principal. Es precisamente bajo
la presencia de selecciona adversa y riesgo moral cuando las asimetrıas de informacion son
costosas para el principal. En efecto, cualquier perfil de esfuerzos implementable debe ser
estrictamente creciente y, en consecuencia, el primer mejor no se puede alcanzar. Desde
el punto de vista de transferencias, para los casos del primer mejor, se les otorga un bono
decreciente en el tipo de manera de generar el mismo esfuerzo para todos. Mientras que
para cuando se tiene seleccion adversa y riesgo moral se les otorga un mismo bono para
todos los tipos. Y esto es basicamente porque no se puede otorgar esfuerzo decreciente
por la autoseleccion, considerando la doble desviacion antes mencionada. Con esto el
principal distorsiona el esfuerzo de los tipos bajos a la baja, y el de los tipos altos a la alza
de modo de minimizar el costo de la informacion asimetrica. Notablemente, los menus de
transferencias de utilidad ofrecidos por el principal son constantes en el tipo.
Son numerosas las aplicaciones que pueden surgir del modelo planteado, y el procedi-
miento aquı realizado facilita su solucion. Se han realizado dos casos particulares, pero
aplicaciones existen tantas como el numero de situaciones de agente principal que consi-
deren ambos problemas de asimetrıa. En particular se considera que un caso interesante
a estudiar, son las condiciones que hacen que sean optimos diferentes tipos de contratos
laborales, ya sean bonos salariales, bien venta de acciones, pagos fijos, etc. Con ello se
pueden inferir caracterısticas de los distintos mercados laborales, segun el tipo de con-
tratos que se ofrecen. Es claro que la herramienta presentada facilita el analisis de la
eficiencia de los distintos mecanismos que se generan.
62
Page 69
CAPITULO 7. CONCLUSIONES
Se debe mencionar que con lo desarrollado en este trabajo, es relativamente sencillo con-
siderar los costos asociados al esfuerzo dependiendo del tipo del agente, con lo cual se
obtienen resultados semejantes. Los resultados para el modelo que considera solo el pro-
blema de riesgo moral, son evidentemente los mismos, debido a que el tipo es conocido en
este caso. Es importante notar que considerar solo seleccion adversa bajo este supuesto,
esta vez si considera distorsiones. Rentas son cedidas a los agentes de mayor tipo. Ademas
se genera una restriccion no activa (semejante a la obtenida en Myerson 1981) sobre la
pendiente del esfuerzo, que senala que debera ser no decreciente. Los resultados del caso de
considerar Seleccion Adversa y Riesgo Moral simultaneamente son semejantes al modelo
aquı expuesto. La renta concedida a los agentes de tipo alto, son mayores y la condicion
de desviacion doble es mas restrictiva, pues ahora dependera ademas de la complemen-
tariedad entre el tipo y el esfuerzo en la funcion de costos.
La investigacion realizada en este trabajo, muestra la importancia de considerar los pro-
blemas de riesgo moral y seleccion adversa en toda su complejidad. Luego, el resultado
principal es senalar que la subestimacion de alguno de estas asimetrıas, ya sea por simpli-
cidad u otro motivo, puede generar un equilibrio completamente inadecuado con menores
distorsiones. Ademas se considera que el trabajo realizado, genera un importante aporte
a la literatura de teorıa de contratos, pues completa un caso que hasta ahora no habıa
sido considerado.
63
Page 70
Capıtulo 8
Bibliografıa
Mirrlees, J. (1971). An exploration in the theory of optimal income taxation. Review
of Economic Studies, 38, 175-208.
Mirrlees, J. (1974). Notes on welfare economics, information and uncertainty. En
M. Balch, D. M. yWu, S., editores, Essays in Economic Behavior inUncertainty.
North-Holland, Amsterdam.
Mirrless, J. (1975). The theory of moral hazard and unobservable behavior. Working
paper, Nuffield College, Oxford.
Akerlof, G. (1970). The market for Lemons: Qualitative uncertainty and the market
mechanism. QJE, 89, 488-500.
Myerson, R. (1981), Optimal Auction Design, Mathematics of Operations Research,
Vol. 6, No. 1
Rogerson, W. (1985), Repeated Moral Hazard, Econometrica 53, 69-76.
Laffont, J-J. and Tirole, J.(1987), Auctioning Incentive Contracts, The Journal of
Political Economy, Vol 95, No. 5.
Laffont and Tirole (1993), A Theory of Incentives in Procurement and Regulation,
MIT Press Books, edition 1, volume 1.
Laffont and Martimort (2002), The Theory of Incentives, Princeton University Press.
Page, F.H. (1990), Optimal Contract Mechanisms for Principal-Agent Problems with
Moral Hazard and Adverse Selection, Economic Theroy, Vol. 1, No. 4.
64
Page 71
CAPITULO 4. BIBLIOGRAFIA
Royden, H.L. (1987), Real Analysis, Stanford University, Version 3.
Bertsekas, D. (2005), Dynamic Programming and Optimal Control, MIT, Vol. 1,third
edition.
Park, In-Uck (2004), Moral Hazard Contracting and Private Credit Markets, Econo-
metrica, Vol 72, No.3 (May, 2004)
Rivera, Jorge (2005), Apuntes de Matematicas para economıa.
Laffont, J-J. and Tirole, J. (1986) Using Cost Observation to Regulate Firms, Jour-
nal of Political Economy, 1987.
Sappington, D. (1991) Incentives in Principal-Agent Relationships, Journal od Eco-
nomic Perspectives, Vol. 5, No. 2.
Myerson, R. and Baron, D. (1979), Regulating a monopolist with unknown costs,
Econometrica, Vol. 50, No. 4.
Demougin, D. (1989), A renogation-proof mechanism for a principal-agent model
with moral hazard and adverse selection, RAND Journal of Economics, Vol. 20, No.
2.
Gonzalez, P. (2004), Investment and screening under asymmetric endogenous infor-
mation, RAND Journal of Economics, Vol.35, No. 3.
Gul, F. (2001), Unobservable Investment and the Hold-Up Problem, Econometrica,
Vol. 69.
65
Page 72
Capıtulo 9
Anexo
9.1. Condiciones necesarias
El problema reformulado queda planteado como un ejercicio de control optimo. De manera
de expresarlo mas sencillamente se considera
π(e(θ), θ) =
[B(e(θ), θ)− ψ(e(θ))−
[pθ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)
]1− F (θ)
f(θ)
]f(θ)
Lo primero que debe considerarse es la solucion de los esfuerzos a inducir optimos del
problema irrestricto, es decir, sin considerar la restriccion. Dicho optimo irrestricto se
define como:
eirre(θ) = arg maxe∈[e,e]
{π(e, θ)}
Como el conjunto de soporte de los esfuerzos es cerrado y acotado, y se asume continuidad
de la funcion π(e, θ) en e, entonces por el Teorema de Weierstrass se puede asegurar que
dado un θ existe un maximo e?(θ) que se asume unico. En particular se asume lo siguiente:
πe,e(e, θ) < 0 ∀e ∈ [e, e] , ∀θ ∈[θ, θ]
Mas aun se necesita que la solucion es interior:
πe(eirre(θ), θ) = 0 ∀θ ∈
[θ, θ]
66
Page 73
CAPITULO 6. ANEXO
Ademas se define,
G(e(θ), θ) =pe,θ(e(θ), θ)ψe(e(θ))
pe(e(θ), θ)ψe,e(e(θ))− pe,e(e(θ), θ)ψe(e(θ))
El problema de control optimo se puede entonces plantear de la siguiente manera:
max{e(θ)}
θ∈[θ,θ]
∫ θ
θ
π(e(θ), θ)dθ
Sujeto a:de(θ)
dθ≥ G(e(θ), θ)
Ahora si se reformula la restriccion, donde ahora la variable de control es u(θ), y se
considera una minimizacion, entonces el problema tiene la siguiente forma:
minu(θ)≥0,e(θ)∈[e,e]
∫ θ
θ
−π(e(θ), θ)dθ
Sujeto a:de(θ)
dθ= G(e(θ), θ) + u(θ)
u(θ) ≥ 0
e(θ) ∈ [e, e]
Esto es porque se puede realizar una equivalencia entre los conjuntos
[e :[θ, θ]→ [e, e] |
de(θ)
dθ≥ G(e(θ), θ)
]
y el conjunto
[e(θ) ∈ [e, e] , u :
[θ, θ]→ [0,∞[ |
de(θ)
dθ= G(e(θ), θ) + u(θ)
]
Esto es definiendo u(θ) = de(θ)dθ
− G(e(θ), θ) ≥ 0. Se resolvera inicialmente el problema
de minimizacion en u, dada una condicion inicial que se supone e(θ) ∈ [e, e]. Ahora se
considera las condiciones de mınimo de Pontryagin (ver Bertsekas 2005). Para ello se
utiliza la funcion y(θ) ∈ (−∞,∞) de multiplicadores. Definimos la funcion hamiltoneana
como H(e, θ, u, y) = −π(e, θ) + y [G(e, θ)− u].
67
Page 74
CAPITULO 6. ANEXO
Luego las condiciones necesarias del problema adjunto son las siguientes:
de(θ)
dθ=dH(e?(θ), θ, u?(θ), y?(θ))
dy
dy(θ)
dθ= −
dH(e?(θ), θ, u?(θ), y?(θ))
de
u?(θ) ∈ argminH(e?(θ), θ, u?(θ), y?(θ))
y?(θ) = 0
y?(θ) = 0
Con la tercer ecuacion se puede senalar que:
1 Si y?(θ) < 0 entonces u?(θ) diverge, por lo tanto no es apropiado considerar este
caso.
2 Si y?(θ) = 0 entonces cualquier u?(θ) ≥ 0 es optimo.
3 Si y?(θ) > 0 entonces u?(θ) = 0 es optimo.
En conclusion se determina que necesariamente y?(θ) ≥ 0. A partir de la segunda ecuacion
se puede concluir que:
dy(θ)
dθ= πe(e
?(θ), θ)− y?(θ)Ge(e?(θ), θ)
Esto se puede resolver si se multiplica la ecuacion por e∫ θ
θGe(e?(θ),θ). Luego queda que:
d[y(θ)e
∫ θ
θGe(e?(θ),θ)
]
dθ= πe(e
?(θ), θ)e∫ θ
θGe(e(r),r)dr
Y por lo tanto:
y(θ) = e−∫ θ
θGe(e?(θ),θ)
[∫ θ
θ
πe(e?(s), s)e
∫ s
θGe(e(r),r)drds+ Cte
]
Con la condicion y?(θ) = 0 se puede encontrar la Cte. Queda:
y(θ) = −e−∫ θ
θGe(e?(θ),θ)
∫ θ
θ
πe(e?(s), s)e
∫ s
θGe(e(r),r)drds
68
Page 75
CAPITULO 6. ANEXO
Ademas se puede observar que πe(eoptimo(θ), θ) > 0 si eoptimo(θ) < eirre(θ), πe(e
optimo(θ), θ) =
0 si eoptimo(θ) = eirre(θ) y πe(eoptimo(θ), θ) < 0 si eoptimo(θ) > eirre(θ). En terminos graficos
se muestra como sigue:
La solucion del problema dependera de las especificaciones funcionales de las probabili-
dades, funcion de costo y funcion de beneficio.
Afirmacion 4. El esfuerzo optimo sera el del problema irrestricto si este es permitida,
es decir si ∀θ se cumple eirre(θ) ≥ G(eirre(θ), θ).
Demostracion. Esto es directo desde los teoremas de optimizacion, pues la solucion ir-
restricta es factible. Es importante notar que en este caso el esfuerzo a inducir al agente
de tipo θ es igual al esfuerzo del primer mejor, mientras que a los de un tipo menor se les
induce un esfuerzo menor al del primer mejor.
Proposicion 11. Si ∃ θ tal que eirre(θ) < G(eirre(θ), θ), entonces necesariamente ∃s > θ
tal que eoptimo(s) > eirre(s).
Demostracion. Digamos que ∃θ tal que eirre(θ) < G(eirre(θ), θ). En rigor hay distintas
posibilidades.
La primera de ellas es que eoptimo(θ) < eirre(θ). En dicho caso se tiene que en una
vecindad de θ, se cumple que λ(s) < 0 porque πe(eoptimo(s), s) > πe(e
irre(s), s) = 0.
Esto no puede suceder por lo considerado en las condiciones de Pontryagin.
El segundo caso a considerar es que eoptimo(θ) > eirre(θ) en donde no hay problemas
con las condiciones antes expuestas, mas aun se demuestra lo pedido, por lo que el
caso relevante es el siguiente.
69
Page 76
CAPITULO 6. ANEXO
El tercer caso a considerar es que eoptimo(θ) = eirre(θ). Al igual que en el caso anterior
no hay problemas con las condiciones antes mencionadas, porque en una vecindad
se tiene que λ(s) = 0.
Al considerar un tipo inmediatamente menor a θ, se tendran los mismos casos relevantes.
En el peor de los casos, considerando la iteracion antes mencionada, se tiene que ∀s > θ
se cumple que eoptimo(s) = eirre(s). Luego se puede observar que esto no es posible ya
que entonces en dicho caso se tendrıa que λ(θ) < 0 lo cual contradice las condiciones de
Pontryagin.
Es interesante notar que esta proposicion eventualmente significara que hayan distorsiones
en el esfuerzo a inducir de los de mayor tipo (distortion at the top), por la restriccion
de pendiente. En palabras mas generales la proposicion anterior senala que si es nece-
sario considerar un esfuerzo menor al irrestricto para algun tipo (los de tipo mas bajo),
entonces se debe considerar un esfuerzo mayor al irrestricto para los de tipo mas alto.
Esto es especialmente relevante, pues no necesariamente se inducira un esfuerzo optimo
igual al esfuerzo del first best al tipo mas alto, debido a la condicion sobre la pendiente.
Intuitivamente esto asegura que para una mayor cantidad de tipos θ se estara mas cerca
del esfuerzo irrestricto.
Proposicion 12. Se supone que no se puede implementar el esfuerzo irrestricto en todo el
soporte, sino solo en algunos tramos. En particular se considera un intervalo Θirre donde
se cumple que e?(θ) = eirre(θ) con supΘirre < θ, entonces:
1. Para un intervalo de tipos inmediatamente superior a Θirre, digamos Θd se cumple
que e?(θ) < eirre(θ).
2. Para un intervalo de tipos inmediatamente superior a Θd, digamos Θu se cumple
que e?(θ) ≥ eirre(θ).
3. En Θd y Θu, se cumple que y(θ) > 0 y por lo tanto eirre(θ) es solucion de la ecuacion
diferencial e?(θ) = G(e?(θ), θ).
4. Para θ = infΘu, se debe cumplir que eirre(θ) < G(eirre(θ), θ).
5. Para ∀θ ∈ Θirre, se debe cumplir que λ(θ) = 0.
6. Si θ = infΘirre > θ, entonces para un intervalo de tipos inmediatamente inferior a
Θirre se debe cumplir que e?(θ) > eirre(θ).
70
Page 77
CAPITULO 6. ANEXO
Demostracion. 1. Inmediatamente superior a Θirre puede cumplirse que vaya por arriba
de la curva de esfuerzos irrestrictos o por debajo. Como sabemos que al momento de
incorporarse al intervalo Θirre se debe tener que λ(θ) = 0 entonces necesariamente
debe haber llegado por debajo de la curva de esfuerzos irrestrictos, de manera de
desacumular lambda y llegar a cero justo al momento de incorporarse a Θirre.
2. De manera de tener lambda positivo en la zona Θd entonces en Θu se debe cumplir
que e?(θ) ≥ eirre(θ), pues de esta manera acumula lambda.
3. Para Θd y Θu, se cumple que λ(θ) > 0 y por lo tanto, por la condiciones de mınimo
de Pontryagin, se tiene que la restriccion es activa y mas aun, u?(θ) = 0. Por lo
tanto, eirre(θ) es solucion de la ecuacion diferencial deirre(θ)dθ
= G(eirre(θ), θ) tal como
se pide.
4. En θ = infΘu, se pasa desde Θd a Θu por lo tanto es necesario que pase desde bajo
la curva de esfuerzos irrestrictos a pasar sobre la curva de esfuerzos irrestrictos. Es
decir necesariamente se debe cumplir que eirre(θ) < G(eirre(θ), θ) = e?(θ), es decir
que tiene mayor pendiente la curva optima que la curva de esfuerzos irrestrictos.
5. Como en Θirre se tiene que e?(θ) = eirre(θ) entonces necesariamente debe cumplirse
que λ(θ) = 0.
6. En efecto, pues si no se cumpliese entonces se tendrıa λ(θ) < 0 lo cual es contradic-
torio con las condiciones de mınimo de Pontryagin.
Es importante notar que puede suceder que la solucion planteada en el problema anterior,
dıgase e(.), esta fuera del soporte, es decir e(θ) < e o bien e(θ) > e. Es facil imaginar que
el lımite superior e puede ser no acotado, pues se podrıa asumir que siempre se puede
realizar mas esfuerzo. De todas maneras es claro que en este caso, entonces la solucion al
problema es siguiendo la ecuacion diferencial en la vecindad de θ de manera de apegarse lo
mas posible a la solucion planteada anteriormente. Eventualmente la ecuacion diferencial
puede acoplarse con la curva de esfuerzos e(.).
Por otro lado, es sensato imaginar un lımite inferior acotado. Esto significa que hay un
limite inferior razonable en el esfuerzo. En el caso en que la funcion e(.) cumpla que
e(θ) < e, entonces la curva solucion sigue la ecuacion diferencial de la restriccion y el
esfuerzo optimo para el menor tipo sera el limite inferior del soporte e. La funcion optima
de esfuerzo se desplaza hacia arriba en una vecindad de θ, siguiendo la ecuacion diferencial,
71
Page 78
CAPITULO 6. ANEXO
hasta recuperar la funcion de esfuerzo del problema anterior. En el caso en que @θ tal que se
ajusten las curvas, entonces se generaran mayores distorsiones a toda la curva de esfuerzos
optimas, y en particular al mayor tipo.
9.2. Condiciones suficientes
Para demostrar que la solucion planteada mediante las condiciones del mınimo de Pon-
tryaguin son suficientes, son necesarias las siguientes condiciones adicionales (Rivera 2005):
1) −π(e, θ) debe ser convexa en e y u.
2) G(e, θ) + u debe ser concava en e y u.
3) y?(θ) ≥ 0.
Gracias a las condiciones de Pontryaguin se tiene la condicion 3 directamente. Por lo
que es necesario demostrar la condicion 1 y 2. Se puede observar que la condicion 1 es
equivalente a demostrar que π(e, θ) es concava en e y u. Se puede demostrar facilmente
la concavidad en u, pues no hay una dependencia directa. Por otro lado la concavidad
con respecto a e es parte de los supuestos que se hicieron al modelo. La concavidad de
G(e, θ) + u en u se obtiene directamente, pues es una funcion lineal. La concavidad de
G(e, θ) + u en e se asume como supuesto. De todas maneras bajo varias especificaciones
la funcion G(e, θ) es lineal en e y por ende es concava.
72
Page 79
CAPITULO 6. ANEXO
9.3. Estatica comparativa
Afirmacion 5. Primero se debe demostrar que � es una relacion de orden.
Demostracion. 1. Transitividad: Se verifica pues para cualquier e1, e2, e3 ∈ E que
cumplen e1 � e2 y e2 � e3 se muestra facilmente que e1 � e3. El argumento es
transitividad de ≤ en los reales.
2. Reflexividad: Tambien cumple pues e � e. El argumento esta vez es que ≤ es refleja
en los reales.
3. Antisimetrıa: Se hereda, al igual que las otras propiedades, de antisimetrıa de ≤ en
los reales.
Si bien es cierto es relacion de orden, esta no es completa en el sentido que si existen dos
elementos en E que no se relacionan en ningun sentido.
Se define el operador ∨ y ∧ como sigue:
e1 ∨ e2 = min [e tal que e � e1, e � e2]
e1 ∧ e2 = max [e tal que e1 � e, e2 � e]
Si se cumple que ∨ y ∧ estan en E entonces (E,�) es un sublattice.
Se define E = [e tal que e � e1, e � e2] y E = [e tal que e1 � e, e2 � e]
Afirmacion 6. La envolvente superior (inferior) digamos e, cumple que f � (�)e ∀f ∈
E(E).
Demostracion. Sea e :[θ, θ]→ [e, e] tal que e(θ) = max{e1(θ), e2(θ)} es decir la envol-
vente superior.
Sea f ∈ E una funcion cualquiera que cumple que f � e1 y f � e2. Se quiere demostrar
que f � e.
Se puede observar que f(θ) ≥ e(θ) ∀θ pues se cumple que f(θ) ≥ e1(θ) y f(θ) ≥ e2(θ) lo
cual implica que f(θ) ≥ max [e1(θ), e2(θ)].
Analogamente se puede probar que e(θ) = min{e1(θ), e2(θ)} es decir la envolvente inferior,
cumple que para cualquier funcion f ∈ E que cumple que e1 � f y e2 � f entonces
e � f .
Afirmacion 7. La envolvente superior (inferior) pertenece a E(E).
73
Page 80
CAPITULO 6. ANEXO
Demostracion. Es directo de la definicion de envolvente superior (inferior).
Con esto se ha probado que la envolvente superior (inferior) es e1 ∨ (∧)e2.
Afirmacion 8. La envolvente superior (inferior) pertenece a E.
Demostracion. Sea θ un valor donde la funcion envolvente superior (inferior) es derivable.
Se puede observar que ∃j ∈ {1, 2} donde se cumple e(s) = ej(s) ∀s en una vecindad de θ.
Se sabe que se cumpledej(θ)
dθ≥ G(ej(θ), θ), pues ej ∈ E. Por la tanto tambien se cumple
que de(θ)dθ
≥ G(e(θ), θ), es decir e ∈ E.
Proposicion 13. (E,�) es un sublattice.
Demostracion. Se ha demostrado que la envolvente superior (inferior) es e1 ∨ (∧)e2.
Ademas se ha probado que si e1, e2 ∈ E entonces e1 ∨ (∧)e2 ∈ E. Con ello se demuestra
que (E,�) es lattice. Si se considera que el espacio de las funciones (sin restriccion) con
el orden � es tambien un lattice, entonces se considera (E,�) un sublattice.
Afirmacion 9. Π cumple con diferencias crecientes en (e, b) relativos a (�,≥)
Demostracion. Para probar esto es solo necesario verificar que Πb(e1, b) ≥ Πb(e1, b) ∀e1, e2 ∈
E.
Πb(e, b) =
∫ θ
θ
Bb(e(θ), θ, b)f(θ)dθ
Luego como Bb,e(e(θ), θ, b) > 0 entonces se tiene el resultado deseado.
Afirmacion 10. Π es supermodular en e relativo a �.
Demostracion. Sean e1, e2 ∈ E. Luego es necesario probar que ∀b ∈ R se tiene que:
Π(e1 ∨ e2, b) + Π(e1 ∧ e2, b) ≥ Π(e1, b) + Π(e2, b)
Se define Θ1 = {θ ∈[θ, θ]|e1(θ) < e2(θ)}. Ademas se define Θ2 =
[θ, θ]− Θ1. Notemos
entonces que en la integral Π(e1 ∨ e2, b) es considerado e2 en el intervalo Θ1 y e1 en el
intervalo Θ2. En la integral Π(e1 ∧ e2, b) es considerado e1 en el intervalo Θ1 y e2 en el
intervalo Θ2. Por lo tanto en la sumatoria total queda Π(e1, b)+Π(e2, b). Luego se cumple:
Π(e1 ∨ e2, b) + Π(e1 ∧ e2, b) = Π(e1, b) + Π(e2, b)
En particular se cumple lo pedido.
74
Page 81
CAPITULO 6. ANEXO
9.4. Senal del Monitoreo en el Beneficio
Un caso interesante a analizar, es cuando la senal no es solo influyente en le monitoreo
sino tambien en el beneficio del principal. En particular se analiza el modelo donde se
cumple:
B(e, θ) = g p(e, θ) + b (1− p(e, θ))
Sea Θ ∈[θ, θ]el intervalo donde se cumple que el esfuerzo irrestricto no es permitido, es
decir:
Θ = {θ ∈[θ, θ],deirre(θ)
dθ< G(eirre(θ), θ)}
Sea Θ1 ∈[θ, θ]el intervalo donde el esfuerzo optimo esta dado por la solucion de la
ecuacion diferencial.
Θ1 = {θ ∈[θ, θ], y?(θ) > 0}
Se desea estudiar los intervalos donde el esfuerzo irrestricto no es el optimo.
Se puede observar que Θ1 ⊃ Θ.
Se define φ(e, θ) = ψe(e)pθ(e,θ)pe(e,θ)
la renta marginal del tipo θ cuando realiza un esfuerzo e.
Se puede corroborar que φe(e, θ) > 0. Ademas diremos que el ratio de maxima verosimi-
litud es R(t) = 1−F (θ)f(θ)
.
Por lo tanto se tiene que:
πe = pe (g − b)− ψe −R(t)d
de[φ]
= pe (g − b)− ψe −R(t)φe
Luego el esfuerzo irrestricto es aquel que anula la expresion anterior. Se encuentra la
pendiente de la curva de esfuerzos irrestrictos mediante el procedimiento de derivada
implıcita.
dπedθ
= 0 =
(pe,e
de
dθ+ pe,θ
)(g − b)− ψe,e
de
dθ− R′(θ)φe −R(θ)
(φe,e
de
dθ+ φe,θ
)
de
dθ=pe,θ(g − b)−R′(θ)φe − R(θ)φe,θψe,e +R(θ)φe,e − pe,e(g − b)
75
Page 82
CAPITULO 6. ANEXO
G =pe,θψe
peψe,e − pe,eψe
deirre(θ)
dθ−G(eirre(θ), θ)
=pe,θ ((g − b)(peψe,e − pe,eψe)− ψe (ψe,e + R(θ)φe,e − pe,e(g − b)))−
(R′(θ)φe + R(θ)φe,θ
)(peψe,e − pe,eψe)
(ψe,e +R(θ)φe,e − pe,e(g − b)) (peψe,e − pe,eψe)
Afirmacion 11. Siempre se cumple que deirre(θ)dθ
−G(eirre(θ), θ) ≥ 0.
Se puede observar que el denominador siempre es positivo y por ende el signo de deirre(θ)dθ
−
G(eirre(θ), θ) depende del numerador. Para el caso en que θ = θ se cumple ademas que
R(θ) = 0. El numerador queda:
pe,θ(g − b)peψe,e − pe,θψeψe,e −R′(θ)φe (peψe,e − pe,eψe)
≥ pe,θψe,e ((g − b)pe − ψe) = pe,θψe,eπFBe = 0
Ademas como R(θ) ≥ 0 ∀θ entonces R′(θ) ≤ 0.
Si bien es cierto, dicha condicion no es suficiente para demostrar que no hay distorsiones
al top, se muestra a continuacion que en la mayorıa de las especificaciones consideradas se
cumple que no hay distorsiones. Dicho resultado se da principalmente porque la comple-
mentariedad del beneficio pe,θ(e, θ) es igual a la complemetariedad contractual pe,θ(e, θ).
En el caso analizado en la seccion Resultados Principales, subseccion Ejemplo ilustrativo
se tiene que la complementariedad del beneficio Be,θ(e, θ) es nula y por lo tanto, menor
a la complementariedad contractual pe,θ(e, θ). Luego se pueden encontrar especificaciones
en que se inducen distorsiones al top.
76