Paso 1: Debemos decidir cual de las 2 literales igualamos. Escogemos la x de la 2da. Ecuación, para que tenga el mismo coeficiente que la de la primera, se multiplica por 2 y para que sea de signo contrario se multiplica por - 2.
2 x – y = -1 (- 2) x +3 y = 10
2x - y = - 1 -2x - 6y = - 20
-7y = - 21
y = −21−7
y = 3
Paso 2: Ahora este valor se sustituye en alguna de las 2 ecuaciones originales para obtener el valor de la otra incógnita. En este caso la primera.
2 x – y = -1
3
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
2x – 3 = -1
2x = -1 + 3
2x = 2
x = 22
x = 1
Paso 3: Sustituyendo los valores encontrados para las incógnitas en las 2 ecuaciones.
Comprobación en la ecuación 1 Comprobación en la ecuación 2
2 x – y = -1 x +3 y = 10
2(1) – 3 = -1 1 + 3(3) = 10
2 – 3 = -1 1 + 9 = 10
-1 = -1 10 = 10
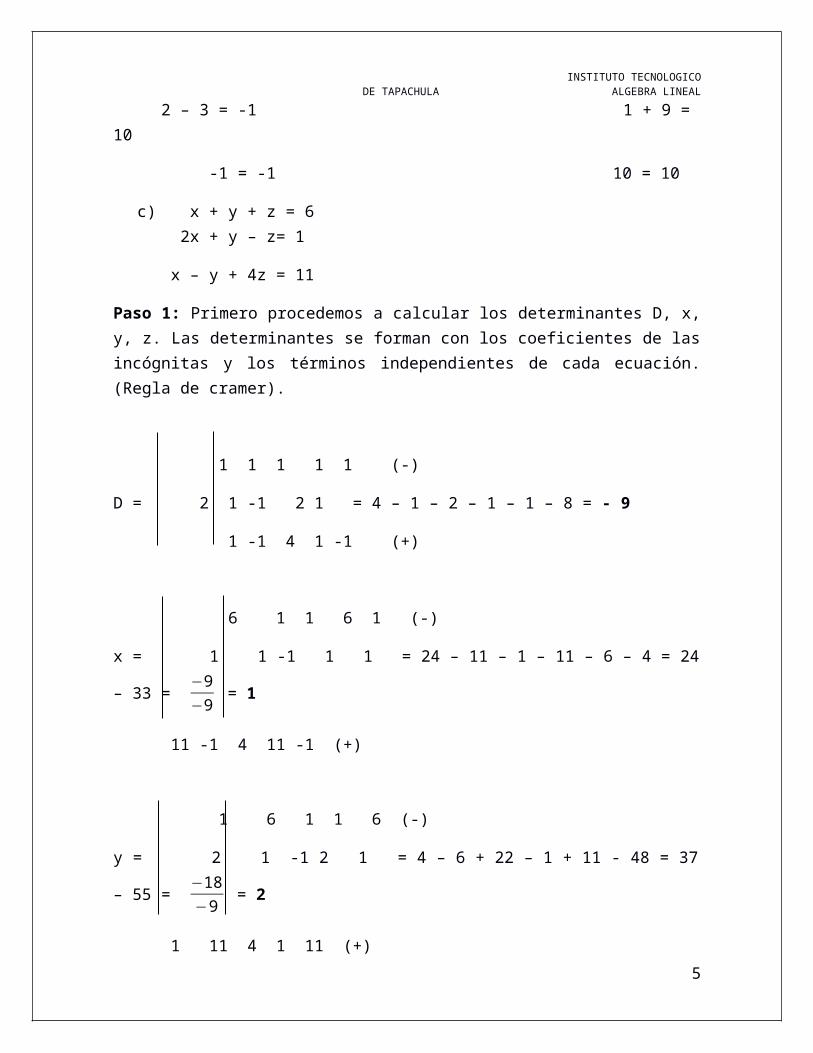
c) x + y + z = 6 2x + y – z= 1
x – y + 4z = 11
Paso 1: Primero procedemos a calcular los determinantes D, x, y, z. Las determinantes se forman con los coeficientes de las incógnitas y los términos independientes de cada ecuación. (Regla de cramer).
ACTIVIDAD 3. INVESTIGAR HISTORIA DE LOS NUMEROS COMPLEJOS, FORMAS Y POTENCIAS DE “I”. PROPIERDADES CICLICAS DE “I”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 13 DE SEPTIEMBRE DE 2011
ACTIVIDAD No.3
INVESTIGAR HISTORIA DE LOS NUMEROS COMPLEJOS, FORMAS Y POTENCIAS DE “I” Y PROPIEDADES CICLICAS DE “I”
14
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Aunque hoy nos es muy familiar el concepto de número, éste fue elaborado muy lentamente a través de los tiempos. Incluso en tiempos recientes, tribus que mantenían normas de vida muy primitivas tenían los conceptos numéricos muy atrasados. Por ejemplo, se dan casos en los que no existía nombre para cantidades mayores que tres; en otros, para números un poco mayores se utilizaban términos similares a "muchos" o "incontables".
Si retrocedemos al tiempo, de las cuatro grandes civilizaciones del mundo occidental antiguo (Babilonia, Egipto, Grecia y Roma), veremos que babilonios y griegos desarrollaron elevados conocimientos de matemáticas.
Para poder realizar importantes obras agrícolas y arquitectónicas, los babilonios tuvieron que desarrollar, hacia el siglo XXII a. de C., un sistema de numeración útil.
Se sabe que su sistema de numeración era de base 60 (a diferencia del actual, que es de base 10); es decir, dividían la unidad en 60 partes (de forma similar a como dividimos una hora en 60 minutos). Los sumerios también utilizaban este sistema de numeración, y realizaban complicados cálculos aritméticos.
Aunque los egipcios no hicieron aportaciones tan significativas como los griegos al desarrollo de los números, se ha encontrado un interesante documento, en el cual se demuestra que ya manejaban algunas fracciones sencillas. Este documento se denomina el Papiro de Rhind. Fue escrito bajo el reinado del rey Ekenenre Apopi, hacia el 1600 a. de C., y, al parecer, es una transcripción de un escrito más antiguo, que se remontaría al reinado de Amenemhat o Amenemes III (XII dinastía, 1850-1800 a. de J. C.). En este papiro se observan unas reglas para realizar sumas y restas de fracciones.Cuando se debía realizar una repartición exacta, no se presentaban problemas de cálculo; sin embargo, si había que dividir 42 panes entre 10 personas, la operación se complicaba. En estos casos, los babilonios utilizaban el número decimal (4,2), mientras que los egipcios, con un sistema de numeración más primitivo, necesitaban de las fracciones para expresar estas divisiones no exactas. Conocían las fracciones de numerador 1 y de denominador 2, 3, 4 , etc., además de las fracciones 2 / 3 y 3 / 4. En el papiro de Rhind se propone un método de cálculo (bastante pesado) que permite dividir 2 entre 19 de la siguiente manera:
Los chinos también conocían las fracciones, y sabían reducir a común denominador. Llamaban "hijo" al numerador, y "madre" al denominador.Pero, entre todos los pueblos de la antigüedad, fueron los griegos los que realizaron las aportaciones más valiosas al desarrollo del concepto de número. La escuela pitagórica (siglo V a. de C.) descubrió que sólo con los números naturales y las fracciones no pueden realizarse todas las medidas posibles. Existían pares de segmentos, como la diagonal y el lado de un pentágono regular, o la diagonal y el lado de un cuadrado, cuyo cociente de longitudes no es una fracción. Creyeron
15
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
que el caos entraba en su mundo ordenado, y llamaron a tal razón "alogos" o irracional.Posteriormente se desarrolló el concepto de número negativo. Fueron los chinos, quienes en el siglo III a. de C. emplearon las varas de contar, un conjunto de barras pintadas de rojo para los números positivos, y de negro para los negativos. Un siglo después, aparecen por vez primera reglas para operar con los números negativos; sin embargo, no eran aceptados como soluciones de los problemas.
Siglos después, hacia el año 500, en la India se plasmaron los orígenes de nuestro sistema de numeración. El principio de posición (valor relativo de las cifras), las nueve cifras y el cero aparecen en las obras del matemático indio Brahmagupta. Durante esta época, los matemáticos indios también aceptaron las soluciones negativas de las ecuaciones, al tiempo que admitían como números las raíces de otros números que no podían ser expresados mediante números racionales.
En el año 772, una embajada india llevó hasta Bagdad los libros en que se recogían estos conocimientos. Gracias a este hecho, en la primera mitad del siglo IX se recopilaron los nuevos métodos matemáticos en un tratado de Al-Khuwarizmi, que en el siglo siguiente se difundieron lentamente por Occidente. La civilización musulmana llevó estos conocimientos a Sicilia y a España, y los mercaderes árabes e italianos los adoptaron, satisfechos de no tener que llevar consigo el incómodo ábaco. Fue el mercader Leonardo Pisano quien, después de haber aprendido aquel arte de los árabes en sus viajes comerciales por Argelia, Sicilia y Oriente, reunió todos los conocimientos de aritmética y álgebra de su tiempo en una obra llamada Liber Abaci (1202), que difundió por Europa la numeración india.
Hasta entonces, en Europa se habían evitado los números negativos; pero en el siglo XIII, el matemático italiano Fibonacci, en un problema referente al dinero, que no tiene solución positiva, observó su necesidad. Durante el siglo XIV, los números negativos eran denominados numeri absurdi.
Se debió esperar hasta el siglo XV, para que el francés Chaquet expresara por primera vez un número negativo aislado en la ecuación4x = -2Durante el siglo XVI, se popularizó el uso de la barra horizontal para separar los términos de una fracción, nomenclatura de origen árabe. Pero, aunque algunos problemas se solucionaban, surgían otros. Al intentar resolver ecuaciones de segundo grado como
16
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
x2 - 2x + 5 = O
Y otras de grado mayor, empezaron a encontrarse expresiones, como la raíz cuadrada de -16, que no se sabían interpretar. Aun sin entenderlas, algunos comenzaron a manipularlas con las mismas reglas que utilizaban para los números que conocian. Fue Cardano, durante este mismo siglo, quien propuso un nuevo tipo de números, que denominó ficticios, como solución a las raíces cuadradas de números negativos.
El problema de los números irracionales no se resolvió por completo hasta el Siglo XVII, cuando Fermat, matemático francés que puede ser considerado el padre de la moderna teoría de números, demostró que expresiones como raíz cuadrada de 3 no eran números racionales.
Sólo quedaba por resolver el problema de las raíces negativas; y esto ocurrió en 1777, cuando Euler dio a la raíz cuadrada de -1 el nombre de i (imaginario). En 1799, Gauss acabó de resolver el problema al demostrar que las soluciones de cualquier ecuación algebraica, fuera cual fuese su grado, pertenecía a un conjunto de números que él llamó complejos, a los que consideró compuestos de un número "ordinario" (hoy lo llamamos número real), más un múltiplo de la raíz cuadrada de -1, llamado unidad imaginaria.
Gerolamo Cardano
17
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Matemático (1501 Pavía, ducado de Milán, 1576 Roma, actual Italia)
Cardano nació el 24 de septiembre de 1501 en Pavía, ducado de Milán y murió en Roma el 21 de septiembre de 1576. Fue hijo ilegítimo de Fazio Cardano y Chiara Micheria. Su padre era abogado en Milán, pero su experiencia en Matemática hizo que Leonardo da Vinci lo consultara en temas de Geometría. Fazio dio clases de Geometría en la Universidad de Pavia. Con más de cincuenta años, conoció a Chiara Micheria, una viuda treintañera, que luchaba por criar 3 hijos. Chaira quedó embarazada de Fazio, con quien se casó años después.
Cardano comenzó como asistente de su padre, que le enseñó Matemática. Pero él aspiraba a más y empezó a pensar en hacer una carrera. Aunque su padre quería que estudiara derecho, Cardano ingresé a la Universidad de Pavia a estudiar medicina, estudios que luego debió continuar en la Universidad de Padua por la guerra. Cardano se graduó de médico en 1525.Malgastó lo que recibió de su padre y se dedicó al juego para mejorar sus finanzas (dados, cartas, ajedrez), del cual hizo un medio de vida ya que habitualmente era más lo que ganaba que lo que perdía. En este ambiente estuvo rodeado de gente de dudosa reputación. El juego se convirtió en una adicción que te duró muchos años y te hizo perder mucho tiempo valioso, dinero y reputación.
Una vez acabados sus estudios intentó ejercer medicina en su Milán natal, pero debido a su mala reputación fue rechazado continuamente por el colegio de médicos. Mientras estuvo inhabilitado para ejercer la medicina, Cardano, en 1533, volvió al juego para poder subsistir, pero te fue tan mal que tuvo que empeñar las joyas de su esposa Lucía, con quien se había casado en 1531.
18
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Buscando desesperadamente un cambio en su suerte, se mudó a Milán, pero te fue peor y entró en la pobreza. En 1539, Cardano publicó sus dos primeros libros. Uno de ellos fue La práctica de Aritmética y las mediciones simples. Este fue el comienzo de una prolífica carrera literaria sobre Medicina, Filosofía, Astronomía, Teología, además de Matemática. Cardano fue un ardiente astrólogo, llevaba amuletos y predecía el futuro durante las tormentas. También escribió sobre el juego.
Ese mismo año Cardano se acercó a Tartaglia, que se había hecho famoso por ganar un duelo matemático resolviendo ecuaciones de tercer grado, y trató de que te explicara el método. Tartaglia aceptó con la promesa bajo juramento de Cardano de que no iba a publicarlo hasta que el mismo Tartaglia lo publicara. Durante los siguientes 6 años Cardano trabajó en las ecuaciones de tercer y cuarto grado sin ningún resultado. Entre 1540 y 1542, Cardano se dedicó al juego de nuevo. En 1545 publica su obra más importante, Ars Magna. En esta obra da los métodos de resolución de las ecuaciones de tercer y cuarto grado. Hoy día sabemos que los resultados publicados y muchas de las ideas contenidos no eran suyos.
Su Ars Magna sin embargo tuvo una influencia en todos los matemáticos posteriores. En esta obra, además se expresan diversos teoremas que relacionan raíces y coeficientes, así como la divisibilidad de un polinomio por factores (x-x1), donde x, es raíz del polinomio. Asimismo en esta obra se establece un notable cambio desde el álgebra literal al álgebra simbólica. Era el mejor libro de Álgebra escrito hasta la fecha. Todavía utilizaba la Geometría para demostraciones algebraicas y todavía rehuía la utilización de números negativos. Sin embargo, el Ars Magna presenta una explicación completa de la ecuación cúbica, incluyendo el tratamiento de números imaginarios. En este libro, también se publica la resolución de la ecuación general de cuarto grado, debida a su alumno, Ferrari, quien se hizo rico al servicio del cardenal Fernando Gonzalo.
A sus 50 años era un médico famoso y conocido. Entre sus pacientes estuvo el Arzobispo de Escocia. Se decía que padecía tuberculosis y Cardano dijo que la sabía curar, lo cual no era cierto. Viajó a Edimburgo y afortunadamente para el obispo, y también para Cardano, resultó que la enfermedad era asma. Cuando Cardano pasó por Londres en el viaje de vuelta, fue recibido por el joven rey Eduardo VI a quien hizo un horóscopo. Le predijo larga vida y un próspero futuro, lo cual le puso en una situación incómoda cuando el chico murió poco después.
Aunque, en varias ocasiones, Cardano había sido profesor de matemáticas de las universidades de Milán, Pavia y Bolonia, teniendo que dimitir de todas ellas por algún escándalo. Al regresar de Escocia era un importante profesor de Medicina en la Universidad de Pavia y con muchos pacientes adinerados, se transformó en un hombre rico y afortunado. En 1546, murió su mujer Lucía y se transformó en rector del Colegio de Médicos de Milán, al cual tanto te costó ingresar. Su mujer
19
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
murió a la edad de 31 años, dejando a Cardano con dos hijos y una hija. De ellos, el mayor, Giambattista estudió medicina y parecía tener un brillante porvenir.
Giambattista se casó y su mujer tuvo tres hijos, ninguno de los cuales resultó ser de su marido. Parece ser que por ello Giambattista le preparó un pastel con arsénico y ella murió. Giambatista fue encarcelado, torturado y finalmente ejecutado el 13 de abril de 1560, ya que Cardano no pudo pagar la suma de dinero que te exigían para salvar a su hijo.Todo esto afectó mucho a Cardano. Con su otro hijo tampoco tampoco tuvo consuelo, fue un criminal y estuvo en prisión muchas veces por ello. En 1562 abandonó Milán, la ciudad de sus triunfos y tragedias, siendo profesor de medicina en la universidad de Bolonia.
Enfermo, en 1565 Ferrari regresa a Bolonia para enseñar Matemática. Allí es envenenado con arsénico por su propia hermana. En 1570 fue encarcelado por herejía por realizar el horóscopo de Jesús y por escribir el libro "En homenaje a Nerón", el odiado emperador anticristiano. Sorprendentemente, salió de prisión poco después y se trasladó a Roma como astrólogo de la corte papal.
También publicó Liber de ludo aleae, que contiene algunos de los primeros trabajos sobre probabilidad, en los que aprovechó su experiencia como jugador y una autobiografía extremadamente franca, De propria vita, que adquirió cierta fama. Hay una leyenda que mantiene que mediante la astrología predijo el día de su muerte, el 20 de septiembre de 1576, y que se suicidó para hacer correcta la predicción.
Pero Cardano ha pasado a la historia porque se apropió de los resultados de Tartaglia y de Nicolo Ferrari, los descubridores de la solución de la ecuación cúbica y cuántica, publicándolos antes que ellos.
Raffaele Bombelli
20
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
(Bolonia, c. 1530- id., 1572) Matemático italiano. En su obra se encuentran interesantes contribuciones a las ecuaciones bicuadradas, a la teoría de los números y al paso progresivo del álgebra geométrica a la geometría analítica.Rafael Bombelli nació en enero de 1526 en Bolonia (Italia). Era uno de los seis hijos de Antonio Mazzoli que cambió su apellido por el de Bombelli. La familia Mazzoli era una noble y rica familia a la que le habían sido confiscadas todas sus propiedades, debido al apoyo que había dado a la familia Bentivoglio en sus disputas con el Papa Julio II. Fue Antonio, padre de Rafael, el que logró recuperar sus propiedades y pudo volver a Bolonia.
Rafael Bombelli no recibió una educación universitaria, sino que adquirió su formación con el ingeniero y arquitecto Pier Francesco Clementi. El propio Bombelli eligió la profesión de ingeniero y arquitecto, trabajando para Rufini, un noble romano que llegaría a obispo de Melfi. No se sabe exactamente como adquirió Bombelli su interés por las matemáticas, probablemente el motivo fue que vivía en la región de Italia donde se desarrollaban los desafíos matemáticos entre Cardano, Tartaglia y otros, con el fin de resolver ecuaciones.
Su patrón Alejandro Rufini le encargó un proyecto para desecar las marismas del valle de Chiana. Aunque este trabajo no llegó a terminarse, Bombelli con su proyecto adquirió una gran reputación en ingeniería hidráulica. En 1561 Bombelli va a Roma a reparar el puente de Santa María sobre el Tíber. A pesar del fracaso del puente su fama como ingeniero no sufrió ninguna merma.
En una de sus visitas a Roma, Bombelli hizo un gran descubrimiento matemático. Antonio María Pazzi, profesor de matemáticas en la universidad de Roma, le enseñó a Bombelli un manuscrito de la Aritmética de Diofanto y los dos decidieron
21
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
hacer conjuntamente una traducción del mismo. A pesar de que nunca llegaron a completar la traducción, Bombelli, a la luz del texto de Diofanto comenzó a revisar sus conocimientos de álgebra. De hecho, en su libro III, 143 de los 272 problemas que aparecen son originales de Diofanto, hecho que el propio Bombelli reconocía. La obra de Bombelli titulada "Álgebra" está dividida en cinco libros. Los tres primeros fueron publicados en 1572, y anunciaba que los libros IV y V, dedicados a la geometría, aparecerían seguidamente. Desgraciadamente Bombelli nunca llegó a publicar estos volúmenes porque la muerte se lo impidió. Murió en 1573, probablemente en Roma.
En 1923, un manuscrito de Bombelli fue descubierto en una biblioteca de Bolonia. Además de una versión manuscrita de los tres libros ya publicados, había un manuscrito inconcluso de los otros dos libros. La geometría incompleta de Bombelli fue publicada en 1929, y en ella se aprecia una influencia de los procedimientos geométricos de Omar Khayyam.En el Álgebra de Bombelli se dan las reglas de los signos, que aún hoy dan tantos problemas a los estudiantes, para operar con números positivos y negativos. Además fue el primero que escribió las reglas para la suma, resta y multiplicación de los números complejos. Además demostró que usando el cálculo de los números complejos podían resolverse ecuaciones. Bombelli usó una notación muy sofisticada para su tiempo. Es justo reconocer a Bombelli como el inventor de los números complejos y su Algebra tuvo una influencia capital en Leibniz.
Bombelli, un ingeniero, hizo un uso práctico de los números complejos porque dichos números le daban resultados útiles. El Álgebra de Bombelli es uno de los más importantes trabajos matemáticos del siglo XVI, y fue el único que dio importancia a los números complejos cuándo aún nadie se la daba.
22
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
POTENCIAS DE i
En cuanto a potencias de i (la unidad imaginaria de un número complejo), se tienen 4
potencias conocidas como básicas, ya que en ellas nos basaremos para sacar otras
potencias más grandes.
i0 = 1
i1 = i
i2 = −1
i3 = −i
i4 = 1
Los resultados de las potencias de la unidad imaginaria se repiten de cuatro en
cuatro.
Para saber cuánto vale una determinada potencia de i, se divide el exponente entre 4,
y el resto es el exponente de la potencia equivalente a la dada.
i22
22÷4=5, y el resto es 2
i22 = (i4)5 · i2 = − 1
i27 = −i
23
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 4. SUMA Y RESTA DE NUMEROS COMPLEJOS. PROPIEDADES
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 13 DE SEPTIEMBRE DE 2011
ACTIVIDAD No. 4
SUMA DE NUMEROS COMPLEJOS
24
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Z1+Z2= (a1+a2) + (b1+b2)i
Ejemplo:
Z1=3+2i con z2=-8+4i
Z1+Z2= (3-8) + (2+4)i
Z1+Z2=-5+6i
NOTA: para sumar números complejos simplemente se suman sus componentes
correspondientes.
RESTA DE NUMEROS COMPLEJOS
Z-W= (a-c)+ (b-d) i
Ejemplo:
Z=4+7i y w=2+3i
Z-W= (4-2) + (7-3) i
Z-W=2+4i
NOTA: para restar números complejos se restan sus componentes correspondientes.
PROPIEDADES
1. Propiedad de cierre para la suma: si Z y W son números complejos, entonces
tanto Z+W como z-W son números complejos.
2. Propiedad asociativa: si Z, W y U son números complejos.
25
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Z +(W+U)= (Z+W) + U
3. Propiedad conmutativa: si Z y U son números complejos.
Z+U= U+Z
4. Propiedad del elemento neutro: El numeró complejo, 0=0+0i es el elemento
neutro para la suma.
En efecto si, Z=a+bi es cualquier número complejo, se tiene:
Z+0= (a+bi) + (0+0i)= (a+0) (b+0) i= Z
De la misma manera se puede probar que 0+Z=Z
5. Propiedad del opuesto: si Z=a+bi es un numero complejo, el opuesto de esta
es –Z=-a-bi, el cual es el otro número complejo, siendo:
Z+ (-Z) = (-Z) + Z=0
Usando todas las propiedades es posible calcular expresiones complicadas en
la que aparezcan sumas y restas de números complejos.
Regla # 1: la vida no es justa… acostúmbrate a ello.
Regla # 2: al mundo no le importa tu autoestima. El mundo espera que triunfes en algo antes de que puedas sentirte bien contigo mismo.
Regla # 3: No ganarás $60 mil dólares al mes justo después de graduarte. Tampoco serás un vicepresidente con un teléfono móvil hasta que consigas ambas cosas.
Regla # 4: Si crees que tu maestro es rudo espera a que conozcas a tu futuro jefe.
Regla # 5: Trabajar en un lugar de hamburguesas no atenta contra tu dignidad. Tus abuelos tenían otra forma de llamar a este tipo de actividades: oportunidades.
Regla # 6: Si te equivocas no culpes a tus padres, asume tu responsabilidad y aprende de los errores.
Regla # 7: Antes de que tú nacieras tus padres no eran tan aburridos como lo son ahora. Se volvieron así porque tienen que pagar tus cuentas, limpiar tu ropa, y escucharte hablar de lo cool que crees ser. Así que antes de salvar el bosque de manos de los parásitos nacidos en la generación de tus padres, trata de limpiar por ti mismo tu propio armario.
39
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Regla # 8: En tu escuela quizá la gente ya no esta separada en ganadores y perdedores, pero en la vida real aún se mantiene esta distinción.
Regla # 9: La vida no esta dividida en semestres. No existen las vacaciones de verano y pocos empleadores están interesados en ayudarte a encontrarte a ti mismo. Para eso utiliza tu propio tiempo extra laboral.
Regla # 10: La televisión no es como la vida real. En la vida real la gente de hecho no vive en cafeterías conviviendo con sus amigos, tienen que ir a trabajar.
Regla # 11: Se amable con los nerds, probablemente termines trabajando para uno de ellos.
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 9. INVESTIGACION SOBRE EL TEOREMA DEL RESIDUO. TEOREMA DEL FACTOR Y TEOREMA DEL ALGEBRA
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
40
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 13 DE SEPTIEMBRE DE 2011
ACTIVIDAD No. 9
INVESTIGACION SOBRE EL TEOREMA DEL RESIDUO, TEOREMA DEL FACTOR Y TEOREMA DEL ALGEBRA
TEOREMA DEL RESIDUO
Teorema que establece que si un polinomio de x, f(x), se divide entre (x - a), donde a es cualquier número real o complejo, entonces el residuo es f(a).
Por ejemplo, si f(x) = x2 + x - 2 se divide entre (x-2), el residuo es f(2) = 22 + (2) - 2 = 4.
Este resultado puede volverse obvio si cambiamos el polinomio a una de las siguientes formas equivalentes:
f(x) = (x-2)(x+3) + 4
Como se muestra, la expresión anterior nos puede llevar fácilmente a esperar que 4 sea el residuo cuando f(x) se divide entre (x-2).
El teorema del residuo nos puede ayudar a encontrar los factores de un polinomio. En este ejemplo, f(1) = 12 + (1) - 2 = 0. Por lo tanto, significa que no existe residuo, es decir, (x-1) es un factor. Esto puede mostrarse fácilmente una vez que reacomodamos el polinomio original en una de las siguientes expresiones equivalentes:
f(x) = (x-1)(x+2)
Como se muestra, (x-1) es un factor.
41
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
TEOREMA DEL FACTOR
En álgebra, el teorema del factor sirve para encontrar los factores de un polinomio (una expresión en la cual los términos sólo son sumados, sustraídos o multiplicados, e.g. x2 + 6x + 6). Es un caso especial del teorema del resto.
El teorema del factor establece que un polinomio f(x) tiene un factor (x − k) si y sólo si k es una raíz de f(x), es decir que f(k) = 0.
Ejemplo
Si se desea encontrar los factores de x3 + 7x2 + 8x + 2, para ello se podría tantear un primer factor, (x − a). Si el resultado de sustituir a en el polinomio es igual a 0, se sabe que hay un factor. ¿Es (x − 1) un factor? Para saberlo, se sustituye x = 1 en el polinomio:
Cómo esta operación da 18 (y no 0), (x − 1) no es un factor de x3 + 7x2 + 8x + 2. Así que ahora se prueba con (x + 1) (sustituyendo x = − 1 en el polinomio):
.
Que da como resultado 0. Por tanto, x − ( − 1), que es equivalente a x + 1, es un factor, y -1 es una raíz de x3 + 7x2 + 8x + 2.
Las otras dos raíces se pueden encontrar dividiendo x3 + 7x2 + 8x + 2 entre (x + 1) para obtener un polinomio de segundo grado, que se puede resolver de nuevo por el teorema del factor, o directamente con la fórmula para resolver ecuaciones de segundo grado.
TEOREMA DEL ALGEBRA
El teorema fundamental del álgebra establece que un polinomio en una variable, no constante y con coeficientes complejos, tiene tantas raíces1 como indica su grado, contando las raíces con sus multiplicidades. En otras palabras, dado un polinomio complejo p de grado n > 0, la ecuación p (z) = 0 tiene exactamente n soluciones complejas, contando multiplicidades. De manera equivalente:
El cuerpo de los complejos es cerrado para las operaciones algebraicas.
42
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Todo polinomio complejo de grado n se puede expresar como un producto de n
polinomios de la forma .
El teorema se establece comúnmente de la siguiente manera: Todo polinomio en una variable de grado n ≥ 1 con coeficientes reales o complejos tiene por lo menos una raíz (real o compleja).2 Aunque ésta en principio parece ser una declaración más débil, implica fácilmente la forma completa por la división polinómica sucesiva por factores lineales.
El nombre del teorema es considerado ahora un error por muchos matemáticos, puesto que es más un teorema del análisis matemático que del álgebra.
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 10. INVESTIGACION DE MATEMATICOS QUE DESARROLLARON EL ALGEBRA LINEAL
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
43
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 13 DE SEPTIEMBRE DE 2011
ACTIVIDAD No. 10
INVESTIGACIÒN DE MATEMATICOS QUE DESARROLLARON EL ALGEBRA LINEAL
HERON DE ALEJANDRIA
(En griego: Ἥρων ὁ Ἀλεξανδρεύς ) (ca. 10–70 d. C.) fue un ingeniero y matemático helenístico, que destacó en Alejandría (en la provincia romana de Egipto); ejerció de ingeniero en su ciudad natal, Alejandría. Este griego es considerado uno de los cientí-ficos e inventores más grandes de la antigüedad[] y su trabajo es representativo de la tradición científica helenista.
Su mayor logro fue la invención de la primera máquina de vapor, conocida como eolí-pila, y la Fuente de Herón. Es autor de numerosos tratados de mecánica, como La neumática donde estudia la hidráulica, y Los autómatas el primer libro de robótica de la historia. En La dioptra describe el funcionamiento de este aparato, similar al actual teodolito, usado en observaciones terrestres y astronómicas durante siglos. También en este libro describe el odómetro, utilizado para medir distancias recorridas por un viandante (o un vehículo).
Describió, aunque de forma arcaica, la ley de acción-reacción de Isaac Newton, expe-rimentando con vapor de agua. Generalizó el principio de la palanca de Arquímedes. Además, realizó una descripción detallada del hýdraulis de Ctesibio (un órgano que funcionaba con agua).
En óptica, propuso en su Catóptrico que la luz viaja siguiendo el camino geométrica-mente más corto.
Herón escribió numerosos libros y tratados en diversas áreas, como la mecánica en el que encontramos sus tratados sobre neumática y autómatas. Sobre la óptica tiene un libro titulado Catóptrico.
Trabajo como matemático
Sin embargo, es conocido sobre todo como matemático, tanto en el campo de la geometría como en el de la geodesia (una rama de las matemáticas que se encarga de la determinación del tamaño y configuración de la Tierra, y de la ubicación de áreas concretas de la misma). Herón trató los problemas de las mediciones terrestres con mucho más acierto que cualquier otro de su época.Como matemático, escribió La Métrica, obra donde estudia las áreas y volúmenes de diversas superficies y cuerpos. Desarrolló también técnicas de cálculo, tomadas de los babilonios y egipcios, como el cálculo de raíces cuadradas mediante iteraciones.
Fórmula de Herón
Su logro más destacado en el campo de la geometría es la denominada fórmula de Herón, donde establece la relación entre el área de un triángulo y la longitud de sus lados:
«En un triángulo de lados a, b, c, y semiperímetro s=(a+b+c)/2, su área es igual a la raíz cuadrada de s(s-a)(s-b)(s-c).»
(griego antiguo: Διόφαντος ὁ Ἀλεξανδρεύς, Dióphantos ho Alexandreús), nacido alre-dedor del 200/214 y fallecido alrededor de 284/298, fue un antiguo matemático griego. Es considerado "el padre del álgebra".
Resolvió problemas con ecuaciones algebraicas e inventó un formulismo particular.
Su principal obra es la "Arithmetica", dedicada casi exclusivamente a la resolución
exacta de ecuaciones determinadas e indeterminadas, de forma que la rama del análi-
sis que se dedica a esta tarea, se conoce hoy en día como análisis diofántico.
La obra más conocida de Diofanto es Aritmética, una colección de 130 problemas,
distribuidos en 13 libros, de los que sólo se conservan 6. La mayoría de los problemas
son de ecuaciones lineales y cuadráticas, pero siempre con solución positiva y racio-
nal, pues en aquella época no tenían sentido los números negativos y mucho menos
los irracionales.
Diofanto consideró tres tipos de ecuaciones de segundo grado:
ax2 + bx = c
ax2 = bx + c
ax2 + c = bx
El motivo de no considerar estas ecuaciones como una sola es que en aquella época
no existía el cero ni los números negativos.
Aritmética también trata sobre teoría de números. Parece ser que Diofanto sabía que
ningún número de la forma 4n + 3 o 4n - 1 puede obtenerse como la suma de dos
cuadrados, ni ningún número de la forma 24n + 7 puede obtenerse como la suma de
tres cuadrados.
Diofanto introdujo símbolos para representar las cantidades desconocidas y una abre-
viatura para la palabra igual. Esto fue un paso muy importante hacia el álgebra simbó-
lica actual.
Aritmetica ha sido un libro muy influyente en el desarrollo de la matemática. La traduc-
ción más famosa es la de Bachet en 1621, que es la edición en que Fermat hizo su
célebre anotación.Su obra se caracteriza por su estilo analítico propio, único en toda
la literatura matemática antigua. Los escritos de Diofanto contribuyeron de manera es-
encial para el perfeccionamiento de la notación algebraica, a la vez que abrieron nue-
46
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
vas perspectivas para el desarrollo del álgebra de la época. La obra de Diofanto sirvió
de base a tres importantes corrientes de la matemática posterior: la geometría analíti-
ca, el álgebra moderna y la teoría de números.
Se puede considerar a Diofanto como el fundador del Álgebra.
Diofanto escribió otros libros, como Porismas, que se ha perdido y otro Sobre núme-
ros poligonales que ha llegado hasta nuestros días. Otro trabajo titulado Preliminares
a los elementos de geometría, que se atribuía a Heron, se cree que pertenece a Dio-
fanto.
AL-JWARIZMI
Debemos a su nombre y al de su obra principal, Hisab al yabr ua al muqabala, (حساب المقابلة و (الجبر nuestras palabras álgebra, guarismo y algoritmo. De hecho, es
considerado como el padre del álgebra y como el introductor de nuestro sistema de numeración.
OBRAS
Álgebra
En su tratado de álgebra Al-Kitab al-mukhtaṣar fi hīsāb al-Gabr wa'l-muqābala (El Li-
bro Recopilatorio sobre el Cálculo por Compleción y Equilibrio), obra eminentemente
didáctica, se pretende enseñar un álgebra aplicada a la resolución de problemas de la
vida cotidiana del imperio islámico de entonces. La traducción de Rosen de las pala-
bras de Al-Jwarizmi describiendo los fines de su libro, dan cuenta de lo que el sabio
pretendía enseñar:
47
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Aquello que es fácil y más útil en aritmética, tal que los hombres lo requieren cons-
tantemente en casos de herencia, legados, particiones, juicios, y comercio, y en todos
sus tratos con los demás, o cuando se trata de la mensura de tierras, la excavación
de canales, cálculos geométricos, y otros objetos de varias clases y tipos."
Traducido al latín por Gerardo de Cremona, se utilizó en las universidades europeas
como libro de texto hasta el siglo XVI. Es posible que antes de él se hubiesen resuelto
ecuaciones concretas, pero éste es el primer tratado conocido en el que se hace un
estudio exhaustivo.
Luego de presentar los números naturales, al-Jwarizmi aborda la cuestión principal en
la primera parte del libro: la solución de ecuaciones. Sus ecuaciones son lineales o
cuadráticas y están compuestas de unidades, raíces y cuadrados; para él, por ejem-
plo, una unidad era un número, una raíz era x y un cuadrado x2. Aunque en los ejem-
plos que siguen usaremos la notación algebraica corriente en nuestros días para ayu-
dar al lector a entender las nociones, es de destacar que al-Juarizmi no empleaba
símbolos de ninguna clase, sino sólo palabras.
Primero reduce una ecuación a alguna de las seis formas siguientes:
1. Cuadrados iguales a raíces.
2. Cuadrados iguales a números.
3. Raíces iguales a números.
4. Cuadrados y raíces iguales a números, por ejemplo x2 + 10x = 39
5. Cuadrados y números iguales a raíces, por ejemplo x2 + 21 = 10x
6. Raíces y números iguales a cuadrados, por ejemplo 3x + 4 = x2
La reducción se lleva a cabo utilizando las operaciones de al-jabr ("compleción", el
proceso de eliminar términos negativos de la ecuación) y al-muqabala ("balanceo", el
proceso de reducir los términos positivos de la misma potencia cuando aparecen a
ambos lados de la ecuación). Luego, al-Jwarizmi muestra como resolver los seis tipos
de ecuaciones, usando métodos de solución algebraicos y geométricos. Por ejemplo,
para resolver la ecuación x2 + 10x = 39, escribe:
"Un cuadrado y diez raíces son iguales a 39 unidades. Entonces, la pregunta en este
tipo de ecuación es aproximadamente así: cuál es el cuadrado que, combinado con
diez de sus raíces, dará una suma total de 39. La manera de resolver este tipo de
ecuación es tomar la mitad de las raíces mencionadas. Ahora, las raíces en el proble-
ma que tenemos ante nosotros son diez. Por lo tanto, tomamos 5 que multiplicadas
48
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
por sí mismas dan 25, una cantidad que agregarás a 39 dando 64. Habiendo extraído
la raíz cuadrada de esto, que es 8, sustraemos de allí la mitad de las raíces, 5, resul-
tando 3. Por lo tanto el número tres representa una raíz de este cuadrado."
Sigue la prueba geométrica por compleción del cuadrado, que no expondremos aquí. Señalaremos sin embargo que las pruebas geométricas que usa al-Jwarizmi son objeto de controversia entre los expertos. La cuestión, que permanece sin respuesta, es si estaba familiarizado con el trabajo de Euclides. Debe recordarse, en la juventud de al-Jwarizmi y durante el reinado de Harun al-Rashid, al-Hajjaj había traducido los Elementos de Euclides al árabe, y era uno de los compañeros de al-Jwarizmi en la Casa de la Sabiduría. Hay historiadores que opinan que el tratamiento de al-Jwarizmi fue probablemente inspirado en el reciente conocimiento de los Elementos. Otros, sin embargo, sostienen que los Elementos le eran completamente desconocidos. Continúa el Hisab al-jabr w'al-muqabala examinando cómo las leyes de la aritmética se extienden a sus objetos algebraicos. Por ejemplo, muestra cómo multiplicar expresiones como (a + bx)(c + dx). La parte siguiente consiste en aplicaciones y ejemplos. Describe reglas para hallar el área de figuras geométricas como el círculo, y el volumen de sólidos como la esfera, el cono y la pirámide. Esta sección, ciertamente, tiene mucha mayor afinidad con los textos hebreos e indios que con cualquier obra griega. La parte final del libro se ocupa de las complejas reglas islámicas de herencia, pero requiere poco del álgebra que expuso anteriormente, más allá de la resolución de ecuaciones lineales.
Aritmética
De su aritmética, posiblemente denominada originalmente Kitab al Yamaa ua al Tafriq
bi Hisab al Hindi, ( الهند بحساب التفريق و الجامع ,libro de la suma y de la resta" ,(كتاب
según el cálculo indio", sólo conservamos una versión latina del siglo XII, Algoritmi de
numero Indorum. Desafortunadamente, se sabe que la obra, traducida al inglés, se
aparta bastante del texto original. En esta obra se describe con detalle el sistema in-
dio de numeración posicional en base 10 y métodos para hacer cálculos con él. Se
sabe que había un método para encontrar raíces cuadradas en la versión árabe, pero
no aparece en la versión latina. Posiblemente fue el primero en utilizar el cero como
indicador posicional. Fue esencial para la introducción de este sistema de numeración
en el mundo árabe y posteriormente en Europa.
Astronomía
De su tratado sobre astronomía, Sindhind zij, también se han perdido las dos versio-
nes que escribió en árabe. Esta obra se basa en trabajos astronómicos indios a dife-
rencia de manuales islámicos de astronomía posteriores, que utilizaron los modelos
planetarios griegos del `Almagesto' de Ptolomeo. El texto indio en que se basa el tra-
tado es uno de los obsequiados a la corte de Bagdad alrededor de 770 por una misión
diplomática de la India. En el siglo X, Maslama al-Majriti realizó una revisión crítica de
la versión más corta, que fue traducida al latín por Adelardo de Bath; existe también
una traducción latina de la versión más larga, y ambas traducciones han llegado hasta
nuestro tiempo. Los temas principales cubiertos en la obra son los calendarios; el cál-
culo de las posiciones verdaderas del Sol, la Luna y los planetas; tablas de senos y
tangentes; astronomía esférica; tablas astrológicas; cálculos de paralajes y eclipses; y
visibilidad de la Luna.
Geografía
En Geografía, con una obra denominada Kitab Surat-al-Ard, revisó y corrigió a Ptolo-
meo en lo referente a África y al Oriente. Lista latitudes y longitudes de 2402 sitios, y
emplaza ciudades, montañas, mares, islas, regiones geográficas y ríos, como base
para un mapa del mundo entonces conocido. Incluye mapas que, en conjunto, son
más precisos que los de Ptolomeo. Esta claro que donde hubo mayor conocimiento
local disponible para al-Jwarizmi, como las regiones del Islam, África y el Lejano
Oriente, el trabajo es mucho más exacto que el de Ptolomeo, pero parece haber usa-
do los datos de éste para Europa. Se dice que en estos mapas trabajaron a sus órde-
nes setenta geógrafos.
Otras obras
Su obra conocida se completa con una serie de obras menores sobre temas como el
astrolabio, sobre el que escribió dos textos, sobre relojes solares y sobre el calendario
judío. También escribió una historia política conteniendo horóscopos de personajes
prominentes.
OMAR JAYYAM
50
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
(c. 18 de mayo de 1048 - c. 4 de diciembre de 1131). Matemático, astrónomo y poeta
persa, nacido en Nishapur.
Realizó relevantes investigaciones en astronomía, que abarcaron la compilación de
tablas astronómicas y particularmente, la corrección del antiguo calendario Zaratus-
trano, que los persas habían conservado debido a su exactitud, a pesar de que la cul-
tura islámica imponía a todas las naciones conquistadas su calendario lunar. Las in-
vestigaciones realizadas, le permitieron calcular el error del calendario persa que te-
nía un año de 365 días exactos. Para el nuevo calendario, que se llamó Yalalí, (por
orden de Malek Shah, que también se llamaba Yalaledín) Jayam calculó la duración
del año con una exactitud pasmosa. Su error es de un día en 3770 años, menor aún
que el del calendario gregoriano (de un día en 3330 años), que se comenzaría a em-
plear en Europa a partir del 15 de octubre de 1582. Fue formalmente inaugurado el 15
de marzo de 1079, y es el calendario empleado todavía hoy por los Persas. Jayam no
pudo terminar las tablas astronómicas a causa de las muertes de Nezam-el-Molk, y en
el mismo año, 1092 DC, la del sultán Malek Shah.
Hizo su peregrinación a La Meca, según la costumbre musulmana en el 1092 DC. A su regreso a Neishabur, permaneció vinculado a la corte donde se desempeñó como historiador y juez, y dio clases de disciplinas como matemáticas, astronomía, historia, medicina y filosofía. Lamentablemente, su obra científica sólo nos llegó en parte. Son extraordinarias: la Disertación sobre una posible demostración del postulado paralelo, de la geometría de Euclides, la Tesis sobre demostraciones de álgebra y comparación escrita en árabe (traducida por Woepecke en 1851), y el Tratado sobre la exactitud del sistema indio para calcular raíces de ecuaciones referido a ecuaciones de segun-do y tercer grado, Los problemas en aritmética y cálculo, la Descripción de las tablas astronómicas de Malek Shah, el ensayo Luz de la Razón sobre la ciencia en general, y la Disertación sobre ciencias naturales. Existen unos ocho trabajos más, sobre físi-ca, economía, historia, filosofía, metafísica y tradiciones.
En su Tesis sobre demostraciones de álgebra y comparación desarrolla el primer pro-cedimiento de solución de las ecuaciones cuadráticas y cúbicas a partir de las seccio-nes cónicas, que permite encontrarles una raíz positiva, y asimismo logra demostrar que tienen al menos una segunda raíz. Su afirmación de que no se puede hallar las raíces de las ecuaciones de tercer grado mediante regla y compás, no pudo ser de-mostrada hasta 750 años después, y la teoría de las ecuaciones de tercer grado, se desarrolló recién en el siglo XVII, con Descartes.
Fue el primero que describió el desarrollo de la potencia de un binomio con exponente natural, y estableció, por primera vez en la historia de las matemáticas, la idea de que las fracciones podrían constituir un campo numérico con propiedades más amplias que el campo de los números naturales, único conocido entonces, y que databa des-
de los griegos. Estos conceptos teóricos se contaron entre las matemáticas de punta durante todo el renacimiento europeo. La crónica de Nezam-el-Molk, destaca a Jayam como insuperable astrónomo. Pero sus aportes a las matemáticas, que entonces no se comprendieron en toda su trascendencia, aventajan notoriamente sus importantes logros en astronomía.
A pasar de las dificultades de la época en la que vivía, escribió numerosos trabajos, entre los que se incluye "Problemas de Aritmética", que es un libro de música y otro de álgebra y todo esto antes de cumplir sus 25 años.
En 1070 escribió su famoso trabajo de álgebra, Tratado sobre demostraciones de pro-blemas de álgebra, el cual contiene una completa clasificación de ecuaciones cúbicas resueltas geométricamente, mediante la intersección de secciones cónicas. Y es que intentó clasificar ecuaciones cuadráticas con éxito, aunque no pudo encontrar la solu-ción para todas las ecuaciones cúbicas, a pesar de estar seguro de que era posible hacerlo, ya que en algunos casos halló soluciones geométricas.
Malek Shah, nieto del fundador de la dinastía selyúcida, llamó a Omar Jayam para que se trasladase a Isfahán para instalar un observatorio. Omar dirigió este conserva-torio durante 18 años, convirtiéndose en un centro de investigación excepcional. En este lugar se elaboraron tablas astronómicas y se contribuyó a la reforma del calenda-rio, ya que las investigaciones llevadas a cabo le permitieron calcular el error del ca-lendario persa, el cual tenía 365 días exactos y debemos de tener en cuenta que a fi -nales del S.XIX eran 365,242196 días y en la actualidad la duración que se da del año es de 365,242190. Este calendario hoy día es el empleado por los persas. En 1092 se produce la muerte de Malek Shah y se abandona la financiación del observatorio, por lo que la reforma del calendario es abandonada y las tablas astronómicas no pueden ser llevadas a cabo, es decir, acabadas por Omar y es que él mismo sufrió los ata-ques de los ortodoxos musulmanes al interrumpirse el período de paz tras la muerte de Malek Shah.
Investigó las ecuaciones y a él se debe el que la incógnita de las mismas se llame x: Jayam la llamaba shay ("cosa" o "algo", en árabe). El término pasó a xay en caste-llano, y de ahí quedó sólo la inicial x.
LEONARDO FIBONACCI
52
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
(c. 1170 - 1250), también llamado Fibonacci, fue un matemático italiano, famoso por haber difundido en Europa el sistema de numeración indo-arábigo actualmente utiliza-do, el que emplea notación posicional (de base 10, o decimal) y un dígito de valor nulo: el cero; y por idear la sucesión de Fibonacci.
Liber Abaci (Libro del Ábaco). Escrito en 1202, revisado y considerablemente aumentado en 1228, se divide en quince capítulos. Un capítulo importante está dedicado a las fracciones graduales, de las que expone las propiedades. En ellas basa una teoría de los números fraccionarios y, después de haberlas in-troducido en los cálculos de números abstractos, las vuelve un instrumento práctico para la obtención de números concretos. Todas las fracciones se pre-sentan a la manera egipcia, es decir, como suma de fracciones con numerado-
res unitarios y denominadores no repetidos. La única excepción es la fracción , que no se descompone. Incluye una tabla para descomposición en fracciones unitarias que se lee derecha a izquierda, como en las lenguas semíticas.
Practica Geometriae. (Geometría práctica) Está dividido en siete capítulos en los que aborda problemas de geometría dimensional referente a figuras planas y sólidas. Es la obra más avanzada en su tipo que se encuentra en esa época en Occidente.
Flos super solutionibus quarumdam questionum ad numerum et ad geo-metricam pertinentium. (Ramillete de soluciones de ciertas cuestiones relati-vas al número y a la geometría) Comprende quince problemas de análisis de-terminado e indeterminado de primer grado. Dos de esos problemas habían sido propuestos como desafío a Leonardo por Juan de Palermo, matemático de la corte del emperador Federico II.
Carta a Teodoro. Es una simple carta que Leonardo envía a Teodoro, astrólo-go de la corte de Federico II. En ella se resuelven dos problemas. El primero es algebraico y consiste en encontrar objetos de diferentes proporciones. Estos objetos llevan los nombres de pájaros de diversas especies. Paul Ver Eecke, quien tradujo el Liber Quadratorum al francés desde el original latino de la edi-ción de 1228, opina que pudo haber sido una cortesía hacia Federico II, que era aficionado a la caza con halcón, previendo que su carta sería llevada al príncipe. El segundo problema es geométrico-algebraico. Trata de inscribir en un triángulo isósceles un pentágono equilátero que tenga un lado sobre la base del triángulo y los otros dos sobre los restantes de éste. Lo reduce a una ecua-ción de segundo grado, dando un valor muy aproximado para el lado del pentá-gono en el sistema sexagesimal .
Liber Quadratorum. (El Libro de los Números Cuadrados) Consta de veinte proposiciones. Estas no consisten en una recopilación sistemática de las pro-piedades de los números cuadrados, sino una selección de las propiedades que llevan a resolver un problema de análisis indeterminado de segundo grado que le fuera propuesto por Teodoro, un matemático de la corte de Federico II.
53
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
CARL FRIEDERCH GAUSS
(30 de abril de 1777, Brunswick – 23 de febrero de 1855, Göttingen), fue un matemático, astrónomo y físico alemán que contribuyó significativamente en muchos campos, incluida la teoría de números, el análisis matemático, la geometría diferencial, la geodesia, el magnetismo y la óptica. Considerado "el príncipe de las matemáticas" y "el matemático más grande desde la antigüedad", Gauss ha tenido una influencia notable en muchos campos de la matemática y de la ciencia, y es considerado uno de los matemáticos que más influencia ha tenido en la Historia. Fue de los primeros en extender el concepto de divisibilidad a otros conjuntos.
OBRAS
1799: Disertación sobre el teorema fundamental del álgebra, con el título: De-monstratio nova theorematis omnem functionem algebraicam rationalem inte-gram unius variabilis in factores reales primi vel secundi gradus resolvi posse ("Nuevas pruebas del teorema donde cada función integral algebraica de una variable puede resolverse en factores reales [i.e. polinomiales] de primer o se-gundo grado")
1801: Disquisitiones Arithmeticae 1809: Theoria Motus Corporum Coelestium in sectionibus conicis solem ambi-
entium (Theorie der Bewegung der Himmelskörper, die die Sonne in Kegelschnitten umkreisen), trad. al inglés × C. H. Davis, reempreso 1963, Dover, NY
1821, 1823 & 1826: Theoria combinationis observationum erroribus minimis ob-noxiae. Drei Abhandlungen betreffend die Wahrscheinlichkeitsrechnung als Grundlage des Gauß'schen Fehlerfortpflanzungsgesetzes. trad. al inglés × G. W. Stewart, 1987, Society for Industrial Mathematics.
1827: Disquisitiones generales circa superficies curvas, Commentationes Soci-etatis Regiae Scientiarum Gottingesis Recentiores. Volume VI, pp. 99-146. "General Investigations of Curved Surfaces" (published 1965) Raven Press, New York, trad. × A.M.Hiltebeitel & J.C.Morehead.
1843/44: Untersuchungen über Gegenstände der Höheren Geodäsie. Erste Ab-handlung, Abhandlungen der Königlichen Gesellschaft der Wissenschaften in Göttingen. Zweiter Band, pp. 3-46
1846/47: Untersuchungen über Gegenstände der Höheren Geodäsie. Zweite Abhandlung, Abhandlungen der Königlichen Gesellschaft der Wissenschaften in Göttingen. Dritter Band, pp. 3-44
Mathematisches Tagebuch 1796–1814, Ostwaldts Klassiker, Harri Deutsch Ver-lag 2005, mit Anmerkungen von Neumamn, ISBN 978-3-8171-3402-1 (es gibt auch engl. Übers. mit Anmerkungen von Jeremy Gray, Expositiones Math. 1984)
Obras colectivas de Gauss online, traducciones al alemán del texto en latín y comentarios de varias autoridades.
HERMANN GRASSMANN
(Stettin, 15 de abril de 1809 - 26 de septiembre de 1877) fue un lingüista y matemático alemán. También fue físico, humanista, erudito y editor.
En la primavera de 1832 obtuvo una plaza de profesor ayudante en el Instituto de Ste-ttin.
Fue sobre esta época cuando realizó sus dos primeros descubrimientos matemáticos significativos, que estaban destinados a llevarlo a las importantes ideas que desarro-llaría años después. En la premisa de su Die Lineale Ausdehnungslehre, ein neuer Zweig der Mathematik (Teoría de la extensión lineal, una nueva rama de las matemá-ticas – 1844), Grassmann describe cómo había ido llegando a estas ideas ya alrede-dor del año 1832.
Entre los muchos temas que abordó Grassmann está su ensayo sobre la teoría de las mareas. Lo elaboró en 1840, tomando como base la teoría de la Méchanique analyti-que de Lagrange y de la Méchanique céleste de Laplace, pero exponiendo esta teoría por métodos vectoriales, sobre los que trabajaba desde 1832. Este ensayo, publicado por primera en los Collected Works de 1894-1911, contiene el primer testimonio escri-to de lo que hoy se conoce como álgebra lineal y la noción de espacio vectorial. Gra-
ssmann desarrolló estos métodos en Die Lineale Ausdehnungslehre, ein neuer Zweig der Mathematik y Die Ausdehnungslehre: Vollständig und in strenger Form bearbeitet.
En 1844, Grassmann publica su obra maestra, Die Lineale Ausdehnungslehre, ein neuer Zweig der Mathematik, más conocido como Ausdehnungslehre, que se puede traducir como "teoría de la extensión" o "teoría de las magnitudes extensivas". Des-pués de proponer en Ausdehnungslehre nuevas bases para todas las matemáticas, el trabajo empieza con definiciones de naturaleza más bien filosófica. Grassmann de-mostró además que si la geometría se hubiese expresado en forma algebraica como él proponía, el número tres no hubiese desempeñado el papel privilegiado que tiene como número que expresa la dimensiones espaciales; de hecho, el número de posi-bles dimensiones de interés para la geometría es ilimitado.
Desarrollando una idea de su padre, Grassmann definió también en Ausdehnungsleh-re el producto exterior, llamado también "producto combinatorio" (en alemán: äußeres Produkt o kombinatorisches Produkt), la operación clave en el álgebra que hoy se co-noce como álgebra externa. (Conviene no olvidar que en los tiempos de Grassmann la única teoría axiomática disponible era la Geometría euclidiana, y que la noción ge-neral de álgebra abstracta aún no había sido definida.) En 1878, William Kingdon Cli-fford unió el álgebra externa con los cuaterniones de William Rowan Hamilton, sustitu-yendo la regla de Grassmann epep = 0 por epep = 1. Para mayor detalle véase álgebra externa.
El Ausdehnungslehre fue un texto revolucionario, muy avanzado en su época como para poder ser apreciado. Grassmann lo expuso como tesis doctoral, pero Möbius no se consideró capaz de valoralrlo y se lo remitió a Ernst Kummer, que lo rechazó sin haber llevado a cabo una lectura atenta. En los 10 años siguientes, Grassmann escri-bió una serie de trabajos aplicando su teoría de la extensión, incluyendo una Neue Theorie der Elektrodynamik de 1845, y diversos trabajos sobre curvas y superficies alegbraicas, con la esperanza de que estas aplicaciones movieran a los demás a to-mar más en serio su teoría.
En 1846, Möbius invitó a Grassmann a una competición para resolver un problema originalmente planteado por Leibniz: idear un cálculo geométrico privado de coordena-das y propiedades métricas. Geometrische Analyse geknüpft an die von Leibniz erfun-dene geometrische Charakteristik de Grassmann, fue la idea ganadora. Hay que decir sin embargo que el resultado de Grassmann fue el único presentado. De cualquier manera, Möbius, que era uno de los miembros del jurado, criticó el modo en que Gra-ssmann introdujo la noción abstracta sin proporcionar al lector intuición alguna sobre la validez de estas nociones.
En 1853, Grassmann publicó una teoría sobre el modo en que se mezclan los colores; ésta y sus tres leyes de los colores siguen enseñándose hoy en día. El trabajo de Grassmann entraba en contradicción con el de Helmholtz. Grassmann escribió tam-bién sobre cristalografía, electromagnetismo, y mecánica.
56
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
En 1861 Grassmann expuso la primera formulación axiomática de la aritmética, usan-do ampliamente el principio de inducción. Giuseppe Peano y sus seguidores citaron ampliamente este trabajo a partir de 1890.
En 1862, Grassman, tratando de conseguir el reconocimiento de su teoría de la exten-sión, publicó la segunda edición de la 'Ausdehnungslehre', ampliamente reescrita, y con la exposición definitiva de su álgebra lineal. El resultado, Die Ausdehnungslehre: Vollständig und in strenger Form bearbeitet, que se conoce como "Enseñanza de la dilatación" no fue mejor considerada que la edición original, a pesar de que el método de exposición de esta segunda versión de 'Ausdehnungslehre' se anticipara a lo que han sido los libros de texto en el Siglo XX. En esta obra desarrolla un cálculo operato-rio directo para las diversas magnitudes geométricas, que se conoce como números de Grassmann.
El único matemático que valoró en su justa medida las ideas Grassmann en vida de éste fue Hermann Hankel. EN su obra Theorie der complexen Zahlensysteme(1867) ayudó a que se conocieran mejor las ideas de Grassmann. Este trabajo:
"... desarrolló una parte del álgebra de Hermann Grassmann y de los cuaterniones de Hamilton. Hankel fue el primero que reconoció la importancia de los textos de Grass-mann, que habían sido menospreciados durante mucho tiempo... " (introducción de Hankel en el Dictionary of Scientific Biography. New York: 1970-1990)
Se tardó en adoptar los métodos matemáticos de Grassmann pero influyeron directa-mente en Felix Klein y Élie Cartan. La primera monografía de A. N. Whitehead, Uni-versal Algebra de 1898, incluía la primera exposición sistemática en inglés de la teoría de la extensió y del álgebra exterior. La teoráa de la extensión se aplicó al estudio de las formas diferenciales y en las aplicaciones de dichas formas al análisis y a la geo-metría. La geometría diferencial usa el álgebra exterior. Para una introducción sobre la importancia del trabajo de Grassmann en la física matemática.
ÉVARISTE GALOIS
(25 de octubre de 1811 - 31 de mayo de 1832) Era un joven matemático francés naci-do en Bourg-la-Reine. Mientras aún era un adolescente, fue capaz de determinar la condición necesaria y suficiente para que un polinomio sea resuelto por radicales, dando una solución a un problema que había permanecido sin resolver. Su trabajo
57
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ofreció las bases fundamentales para la teoría que lleva su nombre, una rama princi-pal del álgebra abstracta. Fue el primero en utilizar el término "grupo" en un contexto matemático. La teoría constituye una de la bases matemáticas de la modulación CDMA utilizada en comunicaciones y, especialmente, en los Sistemas de navegación por satélite, como GPS, GLONASS, etc.
SYLVESTER, JAMES JOSEPH
(3 de septiembre de 1814, Londres – 15 de marzo de 1897, Oxford) fue un matemáti-co británico. Profesor en las universidades de Londres, Baltimore y Oxford hizo impor-tantes contribuciones en el campo de las matrices (acuñó el término matriz ), teoría de las invariantes algebraicas (en colaboración con su colega A. Cayley), determinantes, teoría de números, particiones y combinatoria. Utilizando determinantes descubrió el método dialítico para eliminar una incógnita entre dos ecuaciones polinomiales) y creó un importante vocabulario matemático. Fue además fundador del American Journal of Mathematics.
En 1877, aceptó la presidencia de la sección de matemáticas en la Universidad Johns Hopkins y, en 1 878, fundó el American Journal of Mathematics, la primer revista ma-temática de Estados Unidos. En 1883, asumió la presidencia del departamento de geometría en Oxford, pero, pocos años después, comenzó a perder la memoria y re-gresó a Londres.
58
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
GEORGE BOOLE
(2 de noviembre de 1815 - 8 de diciembre de 1864) fue un matemático y filósofo británico.Como inventor del álgebra de Boole, que marca los fundamentos de la aritmética computacional moderna, Boole es considerado como uno de los fundadores del campo de las Ciencias de la Computación. En 1854 publicó "An Investigation of the Laws of Thought" en el que desarrollaba un sistema de reglas que le permitían expresar, manipular y simplificar problemas lógicos y filosóficos cuyos argumentos admiten dos estados (verdadero o falso) por procedimientos matemáticos. Se podría decir que es el padre de las operaciones lógicas y gracias a su álgebra hoy en día es posible manipular operaciones lógicas.
ARTHUR CAYLEY
(Richmond, Reino Unido, 16 de agosto de 1821 - Cambridge, 26 de enero de 1895) fue un matemático británico. Es uno de los fundadores de la escuela británica moder-na de matemáticas puras.
Además de su predilección por las matemáticas, también era un ávido lector de nove-las, le gustaba pintar, apasionado de la botánica y de la naturaleza en general, y afi-cionado al alpinismo.
Fue educado en el Trinity College de Cambridge. Estudio durante algún tiempo la ca-rrera de leyes con lo que trabajó de abogado durante 14 años, a la vez que publicaba un gran número de artículos. Luego pasó a ser profesor en Cambridge. Fue el primero que introdujo la multiplicación de las matrices. Es el autor del teorema de Cayley-Ha-milton que dice que cualquier matriz cuadrada es solución de su polinomio caracterís-tico. Dio la primera definición moderna de la noción de grupo.
Recibió la Royal Medal en 1859 y la Medalla Copley en 1882.
En combinatoria, su nombre está unido a la fórmula nn − 2 que enumera los árboles de-corados con n picos.
Se llama a veces octavas de Cayley o números de Cayley a los octoniones.
Es el tercer matemático más prolifico de la historia, sobrepasado tan solo por Euler y Cauchy, con aportaciones a amplias áreas de la matemática. Cayley es autor de una colección de artículos suyos llamado "Collecterd Mathematica Papers of Cayley", que contiene 966 artículos en trece grandes volúmenes.
CHARLES HERMITE
(24 de diciembre de 1822 - 14 de enero de 1901) fue un matemático francés que in-vestigó en el campo de la teoría de números, sobre las formas cuadráticas, polino-mios ortogonales y funciones elípticas, y en el álgebra. Varias entidades matemáticas se llaman hermitianas en su honor. También es conocido por la interpolación polinó-mica de Hermite.
Fue el primero que demostró que e es un número trascendente y no la raíz de una ecuación algebraica o polinómica con coeficientes racionales. Ferdinand von Linde-mann siguió su método para probar la trascendencia de π (1882).
Publicaciones
"Sur quelques applications des fonctions elliptiques.", Paris, 1854 "Cours professé à la Faculté des Sciences", ed. Andoyer, 4ª ed. Paris, 1891 "Correspondance", ed. Baillaud & Bourget, Paris, 1905, 2 vols.
60
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
"Oeuvres de Charles Hermite" ed. Picard para la Academia de Ciencias, 2 vols., Paris, 1905 & 1908.
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 11. EXAMEN: PROGRAMA DE NUMEROS COMPLEJOS
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
61
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 13 DE SEPTIEMBRE DE 2011
ACTIVIDAD No. 11
EXAMEN. PROYECTO QUE SE LLAME PROGRAMA DE NUMEROS COMPLEJOS
import javax.swing.JOptionPane;
public class AlgebraL
{
int s, r, m,d, re,s1, r1,m1, n1, n2, n3, n4;
private void proceso(int me)
{
if(me==1)
{
n1=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un NumeroReal","SUMA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n2=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario i","SUMA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n3=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Real","SUMA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n4=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario i","SUMA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
s=n1+n3;
s1=n2+n4;
JOptionPane.showMessageDialog(null,"El resultado de la suma es "+s+"+"+s1+"i","ALGEBRA LINEAL",JOptionPane.ERROR_MESSAGE);
}
if(me==2)
62
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
{
n1=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Real","RESTA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n2=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario i","RESTA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n3=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Real","RESTA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n4=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario i","RESTA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
r=n1-n3;
r1=n2-n4;
JOptionPane.showMessageDialog(null,"El resultado de la resta es "+r+"-"+r1+"i","ALGEBRA LINEAL",JOptionPane.ERROR_MESSAGE);
}
if(me==3)
{
n1=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Real","MULTIPLICACION DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
n2=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario i","MULTIPLICACION DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
m=n1*n2;
JOptionPane.showMessageDialog(null,"El resultado de la multiplicacion es "+m+"i","ALGEBRA LINEAL",JOptionPane.ERROR_MESSAGE);
}
if(me==4)
{
n1=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Real","DIVISION DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
63
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
n2=Integer.parseInt(JOptionPane.showInputDialog(null,"Dame un Numero Imaginario","RESTA DE # COMPLEJOS",JOptionPane.QUESTION_MESSAGE));
d=n1/n2;
JOptionPane.showMessageDialog(null,"El resultado de la division es "+d+"i","ALGEBRA LINEAL",JOptionPane.ERROR_MESSAGE);
}
if(me==5)
{
System.exit(0);
}
}
public static void main(String args[])
{
AlgebraL obj=new AlgebraL();
int z=0,v;
String a="";
a+="INSTITUTO TECNOLOGICO DE TAPACHULA\n\n Prof. M.C. Jose Luis Ruiz Maldonado\n";
a+=" Ing. SISTEMAS COMPUTACIONALES\n Segundo Semestre\n\n";
a+="Tapachula Chiapas, a 13 de Septiembre del 2011.-";
JOptionPane.showMessageDialog(null,a);
JOptionPane.showMessageDialog(null,"B I E N V E N I D O AL P R O G R A M A","Instituto Tecnologico de Tapachula",JOptionPane.ERROR_MESSAGE);
64
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
for(z=0;z<=10;z++)
{
v=Integer.parseInt(JOptionPane.showInputDialog(null,"M E N U \n 1.- Suma \n 2.- Resta \n 3.- Multiplicacion \n 4.- Division \n 5.- Salir","NUMEROS COMPLEJOS",JOptionPane.ERROR_MESSAGE));
obj.proceso(v);
}
}
}
65
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
UNIDAD II. “MATRICES Y DETERMINANTES”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 20 DE SEPTIEMBRE DE 2011
66
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
INDICE
MATRICES Y DETERMINANTES 66
Actividad No. 12 Definicion de matriz, notacion y orden______________________68-71 Actividad No. 13 Operaciones con matrices______________________________________________72-81 Áctividad No. 14 Clasificaciòn de las matrices____________________________________________82-85 Actividad No. 15 Transformaciones elementales por renglon__________________________________86
Escalonamiento de una matriz________________________________________86-88 Rango de una matriz__________________________________________________89-90
Actividad No. 16 Calculo de la inversa de una matriz______________________________________91-95 Calcular la matriz inversa por el método Gauss-Jordán_____________________ 00 Actividad No. 17 Definición de determinante de una matriz ____________________________ 96-97 Desarrollo de determinantes con la regla de Sarrus ____________________ 97-99 Desarrollo de determinantes por cofactores _____________________________ 99 Actividad No. 18 Propiedades de los determinantes ________________________________ 100-102 Actividad No. 19 Inversa de una matriz cuadrada a través de la adjunta ________________ 103-105 Actividad No. 20 Aplicación de matrices y determinantes ___________________________ 106-110
67
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 12. “DEFINICION DE MATRIZ, NOTACION Y ORDEN”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 12
68
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
DEFINICION DE MATRIZ, NOTACION Y ORDEN
Introducción
Las matrices y los determinantes son herramientas del algebra que facilitan el ordenamiento de datos así como manejo.
Los conceptos de matriz y todos los relacionados fueron desarrollados en el siglo XIX por los matemáticos ingleses J. J Sylvester, Arthur Cayley y el irlandés William Hamilton.
Las matrices se encuentran en aquellos hábitos en donde se trabaja con datos regularmente ordenados y aparecen en situaciones propias de las ciencias sociales, económicas y biológicas.
Matrices
Definición y primeros ejemplos
Una matriz es una tabla rectangular de números reales dispuestos en filas y columnas de modo:
A=( a11 a12 a13a21 a22 a23am1 am2 am3
…a1na2namn) ← FILA DE LA MATRIZ “A”
COLUMNA DE MATRIZ “A”
Abreviadamente se puede
A = ( a i j)
Cada elemento de la matriz lleva 2 subíndices, el primero de ellos “i” indica la fila en el que se encuentra el elemento y el segundo “j” la columna.
Así el elemento a23 está en la fila 2 y en la columna 3. Las matrices siempre se representan con letras mayúsculas.
EJEMPLOS:
Los siguientes son ejemplos de matrices:
A=(2 13 4 ) B=(√6 −4
1 201) C=( 3 1 0
2 −4 0−1 −1/5 √2)
A tiene 2 filas y 2 columnas su tamaño es 2 x 2.
69
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
B tiene 2 filas y 3 columnas diremos que su tamaño es de 2 x 3.
C tiene 3 filas y 3 columnas diremos que su tamaño es de 3 x 3.
Tipos de matrices
1.- Se llama matriz nula a la que tiene todos sus elementos cero.
A = (0 00 0
00)
Es una matriz nula de tamaño 2 x 5.
2.- Se llama matriz fila a la que solo tiene una fila es decir su dimensión es 1 x n.
A = (1 0 4 )
Es una matriz fila de tamaño 1 x 4.
3.-Se llama matriz columna a la que solo consta de una sola columna, es decir su dimensión es m x 1.
C = ( 10√3)
Es una matriz columna de tamaño 3 x 1.
4.-Una matriz cuadrada cuando tiene el mismo número de filas que de columnas, es decir su dimensión es n x n
A = (2 01 3)
La matriz es cuadrada de tamaño 2 x 2 o simplemente de orden 2.
Otro ejemplo de matriz cuadrada es:
D = ( 1 2 36 5 4
−3 −4 0) De orden 3
Dentro de las matrices cuadradas llamaremos diagonal principal a la formada por los elementos a11, a22,…, amn, siendo la matriz:
A = ( a11 a12 a13a21 a22 a23am1 am2 am3
a1na2namn)
70
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
En la matriz “D” del ejemplo anterior su diagonal principal está formada por 1, 5, 0(color amarillo).
D = ( 1 2 36 5 4
−3 −4 0)Se llama traza de la matriz a la suma de los elementos de la diagonal. Es decir
Traza(A)= a11+a22+a33+…+amn
Y en el caso de “D”.
Traza(D)= 1 + 5 + 0 = 6.
La diagonal secundaria está formada por los elementos: a1n-1, a3, n-2,…, an1. En la matriz “D” anterior estará formada 3, 5,-3(color verde).
5.- Una clase especial de matrices cuadradas son las matrices triangulares.
Una matriz es triangular superior si todos los elementos por debajo de la diagonal principal son nulos y triangular inferior si son nulos todos los elementos situados por encima de dicha diagonal.
Son ejemplo de estas matrices:
E=( 1 0 0−2 5 05 1 2) F=(1 4 1 /3
0 9 −50 0 π )
TRIANGULAR SUPERIOR TRIANGULAR INFERIOR
Si una matriz es a la vez triangular superior y triangular inferior, solo tiene elementos no nulos en la diagonal principal.
A = (100090002)
6.-Una matriz de este tipo de denomina matriz diagonal.
G = (1 0 00 −15 00 0 3)
7.-Por ultimo si una matriz diagonal tiene en su diagonal principal solo unos, se les denomina matriz unidad o identidad. Se suele representar por “In” donde “n” es el orden o tamaño de la matriz. Algunas matrices identidad son:
71
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
I2 = (1 00 1) I3 = (1 0 0
0 1 00 0 1)
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 13. “OPERACIONES CON MATRICES”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
72
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
ACTIVIDAD No. 13
OPERACIONES CON MATRICES
Suma y diferencia
Dada dos matrices A y B, podemos realizar su suma o diferencia de acuerdo a la siguiente regla:
“Para sumar o restar los elementos que se encuentren en la misma posición, resultando otra matriz de igual tamaño”.
Ejemplo
( 21 3−42 1) - (20 4
3 21 ) = ( 0 1−1−7 0−4 )
Si las matrices tienen diferente tamaño, no se pueden sumar o restar entre si.
Propiedades de la suma y diferencia de matrices
a) Conmutativa A + B = B + A
b) Asociativa A + (B + C) = (A + B) + C
c) Elemento neutro. La matriz nula del tamaño correspondiente.
d) Elemento opuesto de –A
Ejemplo
Si A= ( 0−1−4−2
3−9 ) -A = ( 014 2
−3 9)
Porque ( 0−1−4−2
3−9 ) + ( 014 2
−3 9) = (000000)
73
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Producto por un número real
Si dada una matriz cualquiera A y un número real K, el producto de ambos se realizan multiplicando todos los elementos de A, por el número real resultando otra matriz de igual tamaño (evidentemente la misma regla sirve para dividir una matriz por un número real).
Ejemplo
-5 = ( 2 13−4 21) = (−10−5−15
20−10−5 )
Propiedades
a) Distributiva respecto a la suma de matrices
K( A +B ) = k * A + k *B
b) Distributiva respecto a la suma de números
K * A + d * A
c) Asociativa
K( d * A ) = ( k * d ) A
d) Elemento neutro, el numero I
I * A = A
Ejercicios
1. Si A=(1 10 1) y B=(−1 0
0 2), hallar una matriz x que verifique la ecuación:
2x-4.A=B
2 x−4 (1 10 1)=(−1 0
0 2)2 x+(−4 −4
0 −4)=(−1 00 2)
74
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
2 x=(−1 00 2)−(−4 −4
0 −4)
2 x=(3 40 6) x=
(3 40 6)
2
x=(32
2
0 3)Comprobación:
2( 32
2
0 3)−4(1 10 1)=(−1 0
0 2)
(3 40 6 )+(−4 −4
0 −4 )=(−1 00 2)
(−1 00 2)=(−1 0
0 2)2. Determinar las matrices X y Y sabiendo que:
3 x−5 y=(1 −28 1 )
Ecuacion lineal
(3) −x+3 y=(2 43 0)
3 x−5 y=(1 −28 1 )
−3 x+9 y=(6 129 0 )
4 y=( 7 1017 1 )
y=( 7 1017 1 )
4
75
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
y=(74
52
174
14)
3 x−5(74
52
174
14)=(1 −2
8 1 )
3 x+(−35
4−50
4−85
4−54
)=(1 −28 1 )
3 x=(1 −28 1 )−(
−354
−504
−854
−54
)3 x=(
394
424
1174
94
)
x=
(394
424
1174
94
)3
x=(134
72
394
34)
Comprobación
76
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
3 x−5 y=(1 −28 1 )
3(134
72
394
34)−5(
74
52
174
14)=(1 −2
8 1 )
(394
212
1174
94
)+(−35
4−25
2−85
4−54
)=(1 −28 1 )
(1 −28 1 )=(1 −2
8 1 )
Trasposición de matrices
Dada la matriz cualquiera A, se llama matriz traspuesta de A y se representa por esta simbología At a la matriz que resulta de intercambiar las filas y las columnas de A.
A=( 2 1 07−3 4 21) 2*4 At = (
2 −31 40 27 1
) 4*2
Evidentemente si A es una matriz de tamaño m*n entonces su traspuesta tendrá tamaño n*m.
Por ejemplo la matriz A= 2*4 At= 4*2
A= m*n At = n*m
Si la matriz A es cuadrada su traspuesta tendrá el mismo tamaño.
Propiedades
a) (At)t = A, es decir la traspuesta de la traspuesta es la matriz inicial.
b) (A+B)t =At + Bt
77
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
c) (K * A)t = K * At
En base a esta nueva operación podemos definir otras 2 clases de matrices que son:
Matriz Simétrica, Es aquella para la que se cumple At = A
Por ejemplo:
A= (2 1 31 0 −23 −2 √7) At = (2 1 3
1 0 −23 −2 √7)
En una matriz simétrica, los elementos son simétricos respecto a la diagonal principal.
Producto de Matrices
Hay que dejar en claro desde el principio que no todas las matrices puedan multiplicarse. 2 matrices se pueden multiplicar cuando se cumple la siguiente condición:
“Para multiplicar 2 matrices A y B, en este orden A*B, es condición indispensable que el numero de columnas de A sea igual al número de filas de B”.
4*2 ; 2*n
Si no se cumple esta condición no puede realizarse el producto, de modo que es una condición que debemos comprobar previo a la multiplicación.
Una vez comprobado que el producto de A*B se puede realizar, si A es una matriz m*n y B es una matriz n*p, entonces el producto A*B da como resultado una matriz C.
A= m*n B= n*p A*B= C (m*p)
“El elemento que se encuentra en la fila i y la columna que se encuentra en la columna j de la matriz C= A*B, se obtiene multiplicando los elementos de la fila i de A por la columna j de B y sumando los resultados”.
c) Elemento neutro: La matriz identidad correspondiente, si A es m*n
A * In = A
In * A = A
d) En general el producto de matrices no es conmutativa.
A * B ≠ B * A
e) El producto de dos matrices no nulas A y B puede dar lugar a una matriz nula.
(2 1 30 2 1) ( 5
2−4) = (00)
2*3 3*1 2*1
(2)(5) + (1)(2) + (3)(-4) = 0
(0)(5) + (2)(2) + (1)(-4) = 0
79
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Matriz Inversa
Sabemos también que el elemento neutro del producto de matrices es la matriz identidad (In).
Todo número real excepto el 0 tiene inverso.
Trasladando a esto a las matrices, nos podemos plantear si dada una matriz cuadrada de orden n, existe su inversa x para el producto de matrices, tal que A*X=In es decir, el producto de A por su inversa produce un elemento neutro, la matriz identidad.
Sin embargo, hay algunas diferencias con los números reales.
1.- No podemos despejar la matriz inversa.
2.- No todas las matrices cuadradas no nulas tienen inversa.
3.- Definamos en primer lugar el termino matriz inversa.
Dada una matriz cuadrada de orden n, se dice que A es invertible si existe otra matriz de mismo orden, denominada matriz inversa de A y representada.
A-1 = matriz inversa de A
Por lo tanto:
A * A-1 = In
A-1 * A = In
Si A no tiene inversa, se dice que es singular o no invertible.
Si una matriz tiene inversa, dicha matriz inversa es única.
80
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Para calcular dicha matriz inversa existe 2 métodos:
a) Método Algebraico
Consiste en determinar A-1 planteando un sistema de ecuaciones, es decir si por ejemplo queremos determinar la inversa de:
A = ( 1 2−1 1)
2 * 2
Lo que estoy buscando es otra matriz de igual tamaño tal que A*A-1=I2
A-1= (x yz t )
A*A-1 = ( 1 2−1 1) (x y
z t ) = (1 00 1)
( x+2 z y+2t−x+z − y+t ) = (1 0
0 1)
x + 2z = 1
-x + z = 0
y + 2t = 0
-y + t = 1
x = 13 z =
13 t =
13 y =
−23
(13+ 2
3−23
+ 23
−13
+13
23+
13
) = (1 00 1)
81
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 14. “CLASIFICACION DE MATRICES”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
82
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 14
CLASIFICACION DE MATRICES
Matriz fila.
Una matriz fila está constituida por un solo renglón.
A = (2 3 −1 )
Matriz columna.
Una matriz columna tiene una sola columna.
A = (−716 )
Matriz rectangular.
La matriz rectangular tiene distinto número de filas que de columnas, siendo su dimensión m*n.
(1 2 59 1 3)
Matriz cuadrada
La matriz cuadrada tiene el mismo número de filas que de columnas.
Los elementos de la forma aii = Diagonal principal constituyen la diagonal principal.
83
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
La diagonal secundaria la forman los elementos con.
i + j = n + 1 (1 2 −62 6 50 1 4 )
Matriz Nula
Es una matriz nula cuando todos los elementos son ceros
(0 00 0)
Matriz Triangular Superior
Es una matriz triangula superior los elementos ordenados por debajo de la diagonal principal son ceros.
(1 7 −20 −3 40 0 2 )
Matriz Triangular Inferior
Es una matriz triangular inferior los elementos situados por encima de la diagonal principal son ceros.
(2 0 01 2 03 5 6)
Matriz Diagonal
Es una matriz diagonal todos los elementos situados por encima y por debajo en la diagonal principal son nulos.
(2 0 00 2 00 0 6)
84
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Matriz Escalar
Una matriz escalar es una matriz diagonal en la que los elementos de la diagonal principal son iguales.
(2 0 00 2 00 0 2)
Matriz Identidad
Una matriz identidad es una matriz diagonal en la que los elementos de la diagonal principal son iguales a 1.
(1 0 00 1 00 0 1)
Matriz Traspuesta
Dada una matriz A, se llama matriz traspuesta de A a la matriz que se obtiene cambiando ordenadamente las filas por las columnas.
A=(2 3 01 2 03 5 6) At =(2 1 3
3 2 50 0 6)
Matriz Regular
Una matriz regular aquella matriz cuadrada que tiene inversa.
Matriz Singular
Para que una matriz singular no tiene inversa
Matriz Idempotente
Una matriz A es ID si: A2 = A
Matriz Involutiva
Una matriz A es involutiva si:
85
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
A2 = In
Matriz Simétrica
Una matriz simétrica es una matriz cuadrada que verifica:
A= At
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 15. TRANSFORMACIONES ELEMENTALES POR RENGLON. ESCALONAMIENTO DE UNA MATRIZ. RANGO DE UNA MATRIZ
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
86
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 15.
TRANSFORMACIONES ELEMENTALES POR RENGLON. ESCALONAMIENTO DE UNA MATRIZ. RANGO DE UNA MATRIZ
ESCALONAMIENTO DE UNA MATRIZ
Sea A una matriz y F una fila de A. Diremos que F es nula si todos los números de F coinciden con el cero. Si F es no nula, llamamos PIVOTE de F al primer número distinto de cero de F contando de izquierda a derecha.
Una MATRIZ ESCALONADA es aquella que verifica las siguientes propiedades:
1. Todas las filas nulas (caso de existir) se encuentran en la parte inferior de la matriz.
2. El pivote de cada fila no nula se encuentra estrictamente más a la derecha que el pivote de la fila de encima.
Por ejemplo, entre las matrices:
87
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
A no es escalonada, mientras que B y C si lo son.
Dada una matriz escalonada E se define el RANGO de E, que representamos por rg (E), como el número de filas no nulas de E.
En los ejemplos B y C de arriba se tiene rg (B) = rg(C) = 2, sin embargo no podemos decir que rg(A) = 3 ya que A no está escalonada. Otro ejemplo, las matrices nulas tienen rango cero y la matriz identidad de orden n cumple rg (In) = n.
La siguiente cuestión que abordaremos es la definición de rango para una matriz cualquiera que no esté escalonada. La idea será la de transformar la matriz dada en otra que sea escalonada mediante las llamadas transformaciones elementales por filas que describimos a continuación.Dada una matriz A cualquiera, las TRANSFORMACIONES ELEMENTALES por filas de A son tres:
I. Intercambiar la posición de dos filas.II. Multiplicar una fila por un número real distinto de cero.III. Sustituir una fila por el resultado de sumarle a dicha fila otra fila que ha sido previamente multiplicada por un número cualquiera.
Nota: Análogamente podríamos hacerlo todo por columnas; sin embargo, son las transformaciones por filas las que son importantes en los sistemas de ecuaciones lineales que estudiaremos después.El siguiente resultado nos garantiza que siempre podemos transformar una matriz cualquiera en otra escalonada.
TeoremaA partir de cualquier matriz A se puede llegar, mediante una cantidad finita de transformaciones elementales, a una matriz escalonada E.Veamos en un ejemplo cómo se hace. Obsérvese que, primero, hacemos que la componente (1,1) de la matriz de partida sea igual a uno. Luego, se hace que el resto de componentes de la primera columna sean cero. Después se pasa a la componente (2,2), y así sucesivamente.
88
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
El teorema anterior nos permite hacer una definición importante:
Dada una matriz A cualquiera se define el RANGO de A y lo denotamos rg(A) como el rango de cualquier matriz escalonada E equivalente con A (se demuestra que este número no depende de la matriz escalonada E a la que se llegue). El rango siempre es un número menor o igual que el número de filas y el número de columnas de A. Además, el rango es cero si y sólo si A = 0. En nuestro ejemplo de antes, el rango es 3.
RANGO DE UNA MATRIZ
Un concepto muy importante relacionado con las matrices es el de rango. El concepto de rango se encuentra ligado al de “independencia lineal” de filas o columnas de una matriz, pero no se introducir a de esta manera porque se requieren conceptos que no conocemos.Baste saber que se define el rango de una matriz como el número máximo de filas o columnas linealmente independientes.Sin embargo, el cálculo del rango de una matriz lo abordaremos desde otra perspecti-va, utilizando el método de Gauss.Supongamos que tenemos una matriz cualquiera A, a la que aplicamos el metodo de Gauss con el fin de simplificarla lo más posible (es decir, consiguiendo que tenga el mayor numero de ceros posible), realizando operaciones elementales en filas.Llamaremos rango de la matriz A y lo representaremos por Rg(A) al número de filas no nulas de la matriz tras aplicarle el método de Gauss.
Ejemplo: Calcular el rango de las siguientes matrices:
89
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
A = (1 12 2) B = (0 3
1 1) C = ( 1 1 02 1 1
−1 1 −2) y D = ( 2 4 6−1 −2 −3)
(1 12 2) f 2−2∗f 1
→ (1 1
0 0) , Rg(A) = 1, solo una fila distinta de cero.
(0 31 1)
←f 2→f 1
¿→
¿ (1 10 3) , Rg(B) = 2 hay 2 filas no nulas.
( 1 1 02 1 1
−1 1 −2) f 2−2∗f 1→ ( 1 1 0
2 1 1−1 1 −2) f 3+ f 1
→ (1 1 0
0 −1 10 2 −2)
f 3+2∗f 2→
(1 1 00 −1 10 0 0) , Rg(C) = 2 hay 2 filas no nulas.
( 2 4 6−1 −2 −3) 2∗f 2+ f 1
→ (2 4 6
0 0 0) , Rg(D) = 1, solo una fila no nula.
Los ejemplos anteriores ponen de manifiesto que el rango de cualquier matriz siempre es menor o igual que el número de filas de la matriz.De hecho se verifica que el rango de cualquier matriz siempre es menor o igual que su número de filas y de columnas, pues el proceso para hacer el metodo de Gauss se puede hacer indistintamente mediante operaciones elementales en filas o en colum-nas.Esto permite, antes de calcular el rango de una matriz, saber entre que valores va a estar ese rango.Por ejemplo, en el caso c) del ejemplo, como la matriz es 3x3 , el rango solo puede ser 0, 1, 2 ´o 3, no hay otras posibilidades.En el caso del apartado d), como la matriz es 2 x 3, el rango solo puede ser 0,1 ´o 2. (De hecho, podemos reducir esto algo más, pues una matriz solo tiene rango cero si es la matriz nula).
Resumiendo:Propiedad: Si A es una matriz de tamaño m x n no nula se cumple que:
1 ≤ Rg(A) ≤ min{m, n}
Ejemplo
90
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Calcular en función de k el rango de la matriz:
A = (1 1 23 3 k )
Aplicando Gauss,
(1 1 23 3 k ) f 2−3∗f 1
→ (1 1 2
0 0 k−6)Ahora es evidente que si k-6=0, la última fila es nula. Por tanto, si k=6, la última fila es nula y el rango de A es 1, Rg(A)=1, mientras que si k-6 es distinto de cero, es decir si k es distinto de 6, hay 2 filas no nulas y el rango de A es 2, Rg(A)=2.Resumiendo:
Si k ≠ 6, entonces Rg(A) = 2Si k=6, entonces Rg(A) = 1
Propiedad:Una matriz cuadrada A tiene inversa ⇐⇒ Rg(A) es máximo.
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 16. CALCULO DE LA INVERSA DE UNA MATRIZ EJERCICIO. CALCULAR LA MATRIZ INVERSA POR EL METODO GAUSS-JORDAN
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
91
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 16.
CALCULO DE LA INVERSA DE UNA MATRIZ EJERCICIO. CALCULAR LA MATRIZ INVERSA POR EL METODO GAUSS-JORDAN
MATRIZ TRASPUESTA
Es la matriz que obtenemos de cambiar filas por columnas. La traspuesta de A la representamos por At.
Ejemplo
A2x3 = (−1 2133 5 ) At
3x2 = (−1 32315 )
MATRIZ ADJUNTA
Es la matriz que se obtiene al sustituir cada elemento por su adjunto.
Ejemplo
Adj (A) = A = ( a11 a12 a13a21 a22 a23am1 am2 am3
a1na2namn)
92
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
MATRIZ INVERSA
La matriz inversa de A es otra matriz que representamos por A-1 y que verifica:
A * A-1 = A-1 *A =1
“El producto de la matriz original con la matriz inversa nos da la matriz identidad.”
La matriz inversa de A es
A-1 = 1
|A| (Adj (A) )T
Solamente tiene inversa las matrices cuadradas cuyo determinantes es distinto de cero.
Propiedades de la inversa
La inversa del producto de dos matrices es el producto de las inversas cambiando el orden.
( A * B )-1 = B-1 * A-1
Ejemplo
Calcular la inversa de la matriz
A = (2−21−111−1 35)
Para calcular la inversa, primero calculamos su determinante.
Determinante A: det(A)
Det(A) = |2−2 1−11 1−13 52−2 1−11 1
| 93
= 10= -3= 2
= -1 = 6= 10
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
= 10 – 3 + 2 – (-1+ 6 + 10) =
= 10 – 3 + 2 + 1 – 6 = - 6 El determinante de A es: - 6
A11 = |1 13 5| = 5 – 3 = 2 A12 = |−1 1
−1 5| = - 5 + 1 = - 4
- (- 5 + 1 ) = 4
A13 = |−1 1−1 3| = -3 + 1 = 2
A21 = |−2 13 5| = -10 – 3 = - 13 A22 = | 2 1
−1 5| = 10 + 1 = 10
A23 = | 2 −2−1 3 | = 6 – 2 = 4 An1 = |−2 1
1 1| = - 2 – 1 = - 3
An2 = | 2 1−1 1| = 2 + 1 = 3 An3 = | 2 −2
−1 1 | = 2 – 2 = 0
Adj(A) = ( 24−21311−4−3−3 0 )
94
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Traspuesta de A
Adj(A)t= ( 213−34 11−3−2−4 0) A-1 = -
16
( 213−34 11−3−2−4 0)
Comprobación
A-1 * A = ( 213−34 11−3−2−4 0) (
2−21−111−1 35) =
A -1 * A = A-1 = - 16
(−6 0 00−6000−6) = (10 0
01 000 1) = I3
APLICACIÓN A LA RESOLUCION DE SISTEMAS DE ECUACIONES LINEALES
2 x−2 y+ z=1
−x+ y+z=0
−x+3 y+5 z=−4
La inversa la hemos calculado. Pongamos el sistema en forma matricial.
(2−21−111−1 35) ( xyz ) = ( 1
−2−4)
Multiplicando ambos términos de la igualdad por su inversa
( 213−34 11−3−2−4 0) (
2−21−111−1 35) ( xyz ) =
95
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
- 16
( 213−34 11−3−2−4 0) (
1−2−4) = -
16
(−12−66 ) = ( 2
1−1)
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 17. DEFINICION DE DETERMINANTE DE UNA MATRIZ. DESARROLLO DE DETERMINANTES POR LA REGLA DE SARRUS.
DESARROLLO DE DETERMINANTES POR COFACTORES
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
96
X = 2
Y= 1
Z =-1
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 17
DEFINICION DE DETERMINANTE DE UNA MATRIZ. DESARROLLO DE DETERMINANTES POR LA REGLA DE SARRUS. DESARROLLO
DE DETERMINANTES POR COFACTORES
DEFINICION DE DETERMINANTE DE UNA MATRIZ
El determinante de una matriz cuadrada es un número real cuya definición exacta es bastante complicada. Por ello, definiremos primero el determinante de matrices pe-queñas, y estudiaremos métodos y técnicas para calcular determinantes en general. Solamente se puede calcular el determinante a matrices cuadradas.En cuanto a la notación, a veces el determinante se escribe con la palabra det, y otras veces se indica sustituyendo los paréntesis de la matriz por barras verticales.
La fórmula anterior se conoce como Regla de Sarrus.
DESARROLLO DE DETERMINANTES POR LA REGLA DE SARRUS
La definición de determinantes es bastante engorrosa y se hace mucho mas pesada a medida que aumenta el orden de la matriz A.
En el caso de las matrices cuadradas de orden 3, esta regla facilita el caso de dichos determinantes.
Si la matriz es A = (a11a12a13a21a22a23a31a32a33) entonces el determinante de A se calcula
mediante de dos expresiones obtenidas del siguiente modo:
Llamaremos sumandos positivos a los obtenidos al multiplicar:
- Los elementos de la diagonal principal, a11 ・ a22 ・ a33.- Los elementos de la línea paralela superior a la diagonal principal por el elemento aislado de la esquina inferior izquierda : a12 ・ a23 ・ a31.- Los elementos de la línea paralela inferior a la diagonal principal por el elemento ais-lado de la esquina superior derecha: a21 ・ a32 ・ a13.
Gráficamente
Llamaremos sumandos negativos a los obtenidos al multiplicar:
- Los elementos de la diagonal secundaria, a13 ・ a22 ・ a31.- Los elementos de la línea paralela superior a la diagonal secundaria por el elemento aislado de la esquina inferior derecha: a12 ・ a21 ・ a33.
- Los elementos de la línea paralela inferior a la diagonal secundaria por el elemento aislado de la esquina superior izquierda: a32 ・ a23 ・ a11.
Gráficamente:
98
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Y entonces det (A)= Sumandos positivos - Sumandos negativos.
Suponga una matriz A n × n, el cofactor (i, j) de la matriz A se define como:Cij = (-1)i+jMij
Ejemplo
Determine C32 de la matriz A:
A = (1 2 −13 4 00 1 −4)
Calculamos primero M32:
A = (1 2 −13 4 00 1 −4) , M32 = (1 −1
3 0 ) = (1)(0) − (3)(−1) = 3
Por tanto, C32 = (−1)3+2M32 = (−1)5(3) = −3.
99
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 18. PROPIEDADES DE LOS DETERMINANTES.
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
100
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
ACTIVIDAD No. 18.
PROPIEDADES DE LOS DETERMINANTES.
Algunas propiedades importantes que tienen los determinantes, y que se enuncian sin demostración, son:1. Si una matriz tiene una línea (fila o columna) de ceros, el determinante vale cero.Esta propiedad es evidente, puesto que por definición de determinante, basta elegir dicha línea para desarrollar y el determinante será 0.2. Si una matriz tiene dos filas iguales o proporcionales, su determinante es nulo.3. Si permutamos dos líneas paralelas de una matriz cuadrada, su determinante cam-bia de signo, por ejemplo:
| 0 12−31 32−524 3 1
3−2−8 1| = 91 | 0 12−3
1 32−53−2−8 1
24 3 1| = - 91
4. Si multiplicamos todos los elementos de una línea de un determinante por un nú-mero, el determinante queda multiplicado por ese número. Por ejemplo:
| 0 12−31 32−524 3 1
3−2−8 1| = 91 | 012−3
2 64−1024 31
32−81| = - 182
Pero | 02 4−62 64−10
4 86 26−4−16 2
| = 16 * 91 = 1456
101
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
5. Si a una línea de una matriz se le suma otra línea multiplicada por un número, el determinante no cambia.Esta propiedad permite utilizar un método más sencillo para calcular determinantes de orden mayor que 3.
6. El determinante de una matriz es igual al de su traspuesta,
|A| = |At|
7. Si A tiene matriz inversa, A−1, se verifica que:
det(A−1) = 1
det (A)
Una estrategia a tener en cuenta en este caso de determinantes de orden 4 o supe-rior, o incluso de orden 3 si la matriz es compleja, es el método de “hacer ceros”, puesto que el valor del determinante no varıa al realizar a la matriz ciertas transforma-ciones elementales en filas, como indica la propiedad 5 anterior, si bien hemos de ser cuidadosos al aplicar dicha propiedad.
Así pues la mejor forma de calcular un determinante es hacer ceros en una fila o co-lumna y desarrollar por dicha fila o columna, porque entonces solo tendremos que cal-cular un adjunto. Por ejemplo, si calculamos:
102
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 19. INVERSA DE UNA MATRIZ CUADRADA A TRAVES DE LA ADJUNTA.
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
103
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Actividad No.19
INVERSA DE UNA MATRIZ CUADRADA ATRAVES DE LA ADJUNTA
Dada una matriz cuadrada A, su matriz adjunta es el resultante de sustituir cada ter-mino de A por sus adjuntos respectivos.El adjunto de un término aij de la matriz A resulta del determinante de la submatriz que se obtiene de eliminar de la matriz A, la fila y la columna a la que pertenece el termino aij multiplicado por (-1)(i+j) . El interés principal de la matriz de adjuntos es que permite calcular la inversa de una matriz, ya que se cumple la relación:
A-1 = 1
|A| (Adj (A) )T
Sin embargo, para matrices de dimensiones grandes, este tipo de cálculo resulta más costoso, en términos de operaciones, que otros métodos como el método de eliminación de Gauss.
Definición y fórmulas de cálculo
Dada una matriz A su matriz de adjuntos es la única matriz B tal que:
ABT =BTA = det(A) I
Esta definición no permite calcular directamente la matriz de adjuntos por lo que comúnmente se define también la matriz de adjuntos mediante la siguiente formula explicita. Dadas las componentes explicitas de la matriz (a ij ) = A ∈ Mnxn para cada i y j se define la matriz A (i, j) como la matriz de orden (n-1) obtenida a partir de A eliminando la fila i-èsima y la columna j-èsima. Y se define la cantidad:
dij = (-1) i + j det(A)(i, j)
Y se obtiene que esta son precisamente las componentes de la matriz de adjuntos ya que, es decir, adj(A) =dij
Ejemplo
Dada una matriz 2 x 2
A = (A11 A12A21 A 22)
104
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Su matriz de adjuntos viene dada por:
Adj(A) = ( A22 −A 21−A12 A11 )
Dada una matiz 3 x 3
A = (A11 A12 A13A21 A 22 A23A31 A 32 A33)
Su matriz adjunta viene dada por:
Adj(A) = + [A 22 A23A 32 A33] - [A 21 A23
A 31 A33] + [A 21 A22A 31 A32]
−[A12 A 13A32 A 33] + [ A11 A13
A 31 A33] - [ A11 A12A 31 A32]
+ [A 12 A13A 22 A23] - [ A11 A13
A 21 A23] + [ A11 A12A 21 A22]
A22A33 – A23A32 A23A32 - A21A33 A21A32 - A22A31
= A32A13 – A33A12 A33A12 –A31A13 A31A12 – A32A11
A12A23 – A13A22 A13A21 – A11A23 A11A22 – A12A21
Para matrices de 3 x 3 tambien puede usarse la siguiente formula:
[adj(A)]ij = 12
∈mni ∈pqjampanq
105
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD 20. APLICACIÓN DE MATRICES Y DETERMINANTES
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 04 DE OCTUBRE DE 2011
Actividad No. 20.
APLICACIÓN DE MATRICES Y DETERMINANTES
TECNICA GAUSS-SEIDEL
106
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
El método de eliminación para resolver ecuaciones simultáneas suministra soluciones suficientemente precisas hasta para 15 o 20 ecuaciones. El número exacto depende de las ecuaciones de que se trate, del número de dígitos que se conservan en el re-sultado de las operaciones aritméticas, y del procedimiento de redondeo. Utilizando ecuaciones de error, el número de ecuaciones que se pueden manejar se puede in-crementar considerablemente a más de 15 o 20, pero este método también es imprác-tico cuando se presentan, por ejemplo, cientos de ecuaciones que se deben resolver simultáneamente. El método de inversión de matrices tiene limitaciones similares cuando se trabaja con números muy grandes de ecuaciones simultáneas.
Sin embargo, existen varias técnicas que se pueden utilizar, para resolver grandes nú-meros de ecuaciones simultáneas. Una de las técnicas más útiles es el método de Gauss-Seidel. Ninguno de los procedimientos alternos es totalmente satisfactorio, y el método de Gauss-Seidel tiene la desventaja de que no siempre converge a una solu-ción o de que a veces converge muy lentamente. Sin embargo, este método convergi-rá siempre a una solución cuando la magnitud del coeficiente de una incógnita dife-rente en cada ecuación del conjunto, sea suficientemente dominante con respecto a las magnitudes de los otros coeficientes de esa ecuación. Es difícil definir el margen mínimo por el que ese coeficiente debe dominar a los otros para asegurar la convergencia y es aún más difícil predecir la velocidad de la conver-gencia para alguna combinación de valores de los coeficientes cuando esa conver-gencia existe. No obstante, cuando el valor absoluto del coeficiente dominante para una incógnita diferente para cada ecuación es mayor que la suma de los valores ab-solutos de los otros coeficientes de esa ecuación, la convergencia está asegurada. Ese conjunto de ecuaciones simultáneas lineales se conoce como sistema diagonal.
Un sistema diagonal es condición suficiente para asegurar la convergencia pero no es condición necesaria. Afortunadamente, las ecuaciones simultáneas lineales que se derivan de muchos pro-blemas de ingeniería, son del tipo en el cual existen siempre coeficientes dominantes.
La secuencia de pasos que constituyen el método de Gauss-Seidel es la siguiente:
1. Asignar un valor inicial a cada incógnita que aparezca en el conjunto. Si es posible hacer una hipótesis razonable de éstos valores, hacerla. Si no, se pueden asignar va-lores seleccionados arbitrariamente. Los valores iniciales utilizados no afectarán la convergencia como tal, pero afectarán el número de iteraciones requeridas para dicha convergencia.
2. Partiendo de la primera ecuación, determinar un nuevo valor para la incógnita que tiene el coeficiente más grande en esa ecuación, utilizando para las otras incógnitas los valores supuestos.
3. Pasar a la segunda ecuación y determinar en ella el valor de la incógnita que tiene el coeficiente más grande en esa ecuación, utilizando el valor calculado para la incóg-nita del paso 2 y los valores supuestos para las incógnitas restantes.
107
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
4. Continuar con las ecuaciones restantes, determinando siempre el valor calculado de la incógnita que tiene el coeficiente más grande en cada ecuación particular, y utili-zando siempre los últimos valores calculados para las otras incógnitas de la ecuación. (Durante la primera iteración, se deben utilizar los valores supuestos para las incógni-tas hasta que se obtenga un valor calculado). Cuando la ecuación final ha sido resuel-ta, proporcionando un valor para la única incógnita, se dice que se ha completado una iteración.
5. Continuar iterando hasta que el valor de cada incógnita, determinado en una itera-ción particular, difiera del valor obtenido en la iteración previa, en una cantidad menor que cierto seleccionado arbitrariamente. El procedimiento queda entonces completo. Refiriéndonos al paso 5, mientras menor sea la magnitud del seleccionado, mayor se-rá la precisión de la solución. Sin embargo, la magnitud del epsilon no especifica el error que puede existir en los valores obtenidos para las incógnitas, ya que ésta es una función de la velocidad de convergencia. Mientras mayor sea la velocidad de convergencia, mayor será la preci-sión obtenida en los valores de las incógnitas para un dado.
CRIPTOGRAFÌA
La palabra criptografía es un término genérico que describe todas las técnicas que permiten cifrar mensajes o hacerlos ininteligibles sin recurrir a una acción específica. El verbo asociado es cifrar.
La criptografía se basa en la aritmética: En el caso de un texto, consiste en transformar las letras que conforman el mensaje en una serie de números (en forma de bits ya que los equipos informáticos usan el sistema binario) y luego realizar cálculos con estos números para:
modificarlos y hacerlos incomprensibles. El resultado de esta modificación (el mensaje cifrado) se llama texto cifrado, en contraste con el mensaje inicial, lla-mado texto simple.
El hecho de codificar un mensaje para que sea secreto se llama cifrado. El método inverso, que consiste en recuperar el mensaje original, se llama descifrado.
El cifrado normalmente se realiza mediante una clave de cifrado y el descifrado requiere una clave de descifrado. Las claves generalmente se dividen en dos tipos:
Las claves simétricas: son las claves que se usan tanto para el cifrado como para el descifrado. En este caso hablamos de cifrado simétrico o cifrado con clave secreta.
Las claves asimétricas: son las claves que se usan en el caso del cifrado asi-métrico (también llamado cifrado con clave pública). En este caso, se usa una clave para el cifrado y otra para el descifrado.
En inglés, el término decryption (descifrado) también se refiere al acto de intentar descifrar en forma ilegítima el mensaje (ya conozca o no el atacante la clave de descifrado). Cuando el atacante no conoce la clave de descifrado, hablamos de criptanálisis o criptoanálisis (también se usa el término decodificación). La criptología es la ciencia que estudia los aspectos científicos de estas técnicas, es decir, combina la criptografía y el criptoanálisis.
Las funciones de la criptografía
La criptografía se usa tradicionalmente para ocultar mensajes de ciertos usuarios. En la actualidad, esta función es incluso más útil ya que las comunicaciones de Internet circulan por infraestructuras cuya fiabilidad y confidencialidad no pueden garantizarse. La criptografía se usa no sólo para proteger la confidencialidad de los datos, sino también para garantizar su integridad y autenticidad.
El criptoanálisis consiste en la reconstrucción de un mensaje cifrado en texto simple utilizando métodos matemáticos. Por lo tanto, todos los criptosistemas deben ser resistentes a los métodos de criptoanálisis. Cuando un método de criptoanálisis permite descifrar un mensaje cifrado mediante el uso de un criptosistema, decimos que el algoritmo de cifrado ha sido decodificado. Generalmente, se distinguen cuatro métodos de criptoanálisis:
Un ataque de sólo texto cifrado consiste en encontrar la clave de descifrado uti-lizando uno o más textos cifrados;
Un ataque de texto simple conocido consiste en encontrar la clave de descifra-do utilizando uno o más textos cifrados conociendo el texto correspondiente;
Un ataque de texto simple elegido consiste en encontrar la clave de descifrado utilizando uno o más textos cifrados. El atacante tiene la opción de generarlos a partir de textos simples;
Un ataque de texto cifrado elegido consiste en encontrar la clave de descifrado utilizando uno o más textos cifrados. El atacante tiene la opción de generarlos a partir de los textos simples.
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
UNIDAD III. “SISTEMA DE ECUACIONES LINEALES”
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
110
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
INDICE
SISTEMA DE ECUACIONES LINEALES 111
Actividad No. 21 Definicion de Sistemas de Ecuaciones Lineales____________113-116 Actividad No. 22 Clasificaciòn de Sistemas de Ecuaciones Lineales y tipo de solucion______117-120 Áctividad No. 23 Interpretacion geometrica de las soluciones____________________________121-126 Actividad No. 24 Metodos de solucion de un Sistema de Ecuaciones Lineales__________________127
Gauss- Jordan___________________________________________________128-131 Inversa de una matriz_______________________________________________131-133
ACTIVIDAD NO. 21. DEFINICION DE SISTEMA DE ECUACIONES LINEALES
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
112
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
Actividad No. 21.
DEFINICION DE SISTEMA DE ECUACIONES LINEALES
Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de primer grado, es decir, las incógnitas no están elevadas a potencias, ni multiplicadas entre sı, ni en el denominador.
Por ejemplo, 3x + 2y + 6z = 6 es una ecuación lineal con tres incógnitas.
Como es bien sabido, las ecuaciones lineales con 2 incógnitas representan una recta en el plano.Si la ecuación lineal tiene 3 incógnitas, su representación gráfica es un plano en el es-pacio.
Un ejemplo de ambas representaciones puede observarse en la figura:
En matemáticas y álgebra lineal, un sistema de ecuaciones lineales, también conocido como sistema lineal de ecuaciones o simplemente sistema lineal, es un conjunto de ecuaciones lineales sobre un cuerpo o un anillo conmutativo. Un ejemplo de sistema lineal de ecuaciones sería el siguiente:
(3x1+2 x2+x3=1
2 x1+2x2+4 x3=−2
−x1+12x2−x3=0 )
El problema consiste en encontrar los valores desconocidos de las variables x1, x2 y x3
El problema de los sistemas lineales de ecuaciones es uno de los más antiguos de la matemática y tiene una infinidad de aplicaciones, como en procesamiento digital de señales, análisis estructural, estimación, predicción y más generalmente en programación lineal así como en la aproximación de problemas no lineales de análisis numérico.
En general, un sistema con m ecuaciones lineales y n incógnitas puede ser escrito en forma ordinaria como:
(a11 x1+a12 x2+…+a1n xn=b1
a21 x1+a22 x2+…+a2n xn=b2)
(am1 x1+am2 x2+…+mnxn=bm )
En este caso tenemos m ecuaciones y n incógnitas.
Los números reales aij se denominan coeficientes y los xi se denominan incógnitas (o números a determinar) y bj se denominan términos independientes.
En el caso de que las incógnitas sean 2 se suelen designar simplemente por x e y en vez de x1 y x2, y en el caso de tres, x, y, z en lugar de x1, x2 y x3 pero esto es indiferen-te a la hora de resolver el sistema.
Resolver el sistema consiste en calcular las incógnitas para que se cumplan TODAS las ecuaciones del sistema simultáneamente.Diremos que dos sistemas son equivalentes cuando tienen las mismas soluciones.
EXPRESIÒN MATRICIAL DE UN SISTEMA
Cualquier sistema de ecuaciones lineales se puede expresar en forma matricial del modo:
) se llama matriz de incógnitas y la matriz B = (b1
b2
.
.bm
) se llama matriz
de términos independientes.
La matriz formada por A y B conjuntamente, es decir:
(A|B)= [( a11a12a13…a1n
a21 a22 a23…a2n
.. . .
.. . .am1am2am3…amn
)(b1
b2
.
.bm
)]Se llama matriz ampliada del sistema y se representara por (A|B) o bien por A*.
115
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD NO. 22 CLASIFICACION DE SISTEMAS DE ECUACIONES LINEALES Y TIPO DE SOLUCION
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
Actividad No. 22.
CLASIFICACION DE SISTEMA DE ECUACIONES LINEALES Y TIPO DE SOLUCION
116
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
CLASIFICACION.-
Según como sea el TÉRMINO INDEPENDIENTE:
Atendiendo a este criterio los sistemas se pueden clasificar en
SISTEMAS HOMOGÉNEOS (si el término independiente es el vector nulo)
AX=0
SISTEMAS NO HOMOGÉNEOS (el término independiente es no nulo
AX=0
Siendo b≠0
Según LA EXISTENCIA o no de SOLUCIONES
Los sistemas de ecuaciones se pueden clasificar según el número de soluciones que pueden presentar. De acuerdo con ese caso se pueden presentar los siguientes ca-sos:
Sistema incompatible si no tiene ninguna solución. Sistema compatible si tiene alguna solución, en este caso además puede dis-
tinguirse entre: o Sistema compatible determinado cuando tiene un número finito de solu-
ciones.o Sistema compatible indeterminado cuando admite un conjunto infinito de
soluciones.
Quedando así la clasificación:
117
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Los sistemas incompatibles geométricamente se caracterizan por (hiper)planos o rectas que se cruzan sin cortarse. Los sistemas compatibles determinados se caracterizan por un conjunto de (hiper)planos o rectas que se cortan en un único punto. Los sistemas compatibles indeterminados se caracterizan por (hiper)planos que se cortan a lo largo de una recta [o más generalmente un hiperplano de dimensión menor]. Desde un punto de vista algebraico los sistemas compatibles determinados se caracterizan porque el determinante de la matriz es diferente de cero:
sistemacompatibledeterminado⟺det (A )≠0
Sistemas compatibles indeterminados
Un sistema sobre un cuerpo K es compatible indeterminado cuando posee un número infinito de soluciones. Por ejemplo, el siguiente sistema:
x+2 y=12 x+4 y=2
Tanto la primera como la segunda ecuación se corresponden con la recta cuya
pendiente es y que pasa por el punto , por lo que ambas intersecan en todos los puntos de dicha recta. El sistema es compatible por haber solución o intersección entre las rectas, pero es indeterminado al ocurrir esto en infinitos puntos.
En este tipo de sistemas, la solución genérica consiste en expresar una o más variables como función matemática del resto. En los sistemas lineales compati-bles indeterminados, al menos una de sus ecuaciones se puede hallar como combinación lineal del resto, es decir, es linealmente dependiente.
Una condición necesaria para que un sistema sea compatible indeterminado es que el determinante de la matriz del sistema sea cero (y por tanto uno de sus autovalores será 0):
De hecho, de las dos condiciones anteriores se desprende, que el conjunto de soluciones de un sistema compatible indeterminado es un subespacio vectorial. Y la dimensión de ese espacio vectorial coincidirá con la multiplicidad geométri-ca del autovalor cero.
Sistemas incompatibles
De un sistema se dice que es incompatible cuando no presenta ninguna solución. Por ejemplo, supongamos el siguiente sistema:
x+2 y=42 x+4 y=7
Las ecuaciones se corresponden gráficamente con dos rectas, ambas con la misma pendiente, Al ser paralelas, no se cortan en ningún punto, es decir, no existe ningún valor que satisfaga a la vez ambas ecuaciones.
Matemáticamente un sistema de estos es incompatible cuando el rango de la matriz del sistema es inferior al rango de la matriz ampliada. Una condición necesaria para que esto suceda es que el determinante de la matriz del sistema sea cero:
sistemaincompatible⇒ detA=0
TIPO DE SOLUCIONES.-
Es un conjunto de valores de las incógnitas que verifican simultáneamente a todas y cada una de las ecuaciones del sistema. De acuerdo con su solución, un sistema puede ser:
Consistente, si admite solución; o Inconsistente, si no admite solución. o Determinado, si la solución es única o Indeterminado, si la solución no es
única. En este caso se demuestra que existe una infinidad de soluciones.
ACTIVIDAD NO. 23 INTERPRETACIÒN GEOMETRICA DE LAS SOLUCIONES
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
Actividad No. 23
INTERPRETACIÒN GEOMETRICA DE LAS SOLUCIONES
Un sistema con n, incógnitas se puede representar en el n-espacio correspondiente. En los sistemas de 2 incógnitas, el universo de nuestro sistema será el plano bidimensional, mientras que cada una de las ecuaciones será representada por una recta, si es lineal, o por una curva, si no lo es. La solución será el punto (o línea) donde intersecten todas las rectas y curvas que representen las ecuaciones. Si no
120
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
existe ningún punto en el que intersecten al mismo tiempo todas las líneas, el sistema es incompatible, o lo que es lo mismo, no tiene solución.
En el caso de un sistema de 3 incógnitas, el universo será el espacio tridimensional, siendo cada ecuación un plano dentro del mismo. Si todos los planos intersectan en un único punto, las coordenadas de éste serán la solución del sistema. Si, por el contrario, la intersección de todos ellos es una recta o incluso un plano, el sistema tendrá infinitas soluciones, que serán las coordenadas de los puntos que forman dicha línea o superficie.
Para un sistema de 4 o más incógnitas, la representación gráfica no es intuitiva para el ser humano, por lo que dichos problemas no suelen enfocarse desde esa óptica.
Ejemplo:
Los sistemas más sencillos son aquellos en los que solo hay dos incógnitas y 2 ecua-ciones.Hay varios sistemas para resolverlos, los más habituales:
* Reducción* Igualación* Sustitución
Como cada ecuación lineal con 2 incógnitas se interpreta geométricamente como una recta, el estudio de la solución del sistema se limita a estudiar la posición de 2 rectas en el plano.
Veamos algunos ejemplos con los tres casos que se pueden presentar. Resolver e in-terpretar el sistema:
x+2 y=−3 −2 y+ y=1
Por reducción
2 x+4 y=−6−2 x+ y=1
5 y=−5
De donde y = -1 y sustituyendo x + 2·(-1) = -3, x = -1.
121
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Es decir, la solución del sistema es única, x = -1, y = -1 lo que significa que el sistema es compatible y determinado, y que las rectas se cortan en un punto, precisamente el (-1,-1):
Solución del sistema, punto(-1, -1)
Resolver e interpretar el sistema
x+2 y=−3−2 x+ y=1
Por igualación:
x=−3−2 y
x=5+2 y2
De donde:
−3−2 y=5+2 y−2
→ 4 y+6=5+4 y→0 y=−1→0=−1
lo cual es imposible y por tanto el sistema no tiene solución, es un sistema incompati-ble y por tanto las rectas son paralelas.
Geométricamente:
122
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Sistema sin solución. Rectas paralelas
Resolver e interpretar el sistema:
x+2 y=−3−2 x+ y=1
Por sustitución:
Como x = −2y − 3 resulta 3(−2y − 3) + 6y = −9, es decir −6y − 9 + 6y = −9, por tanto 0y = 0, 0 = 0. Como 0 = 0 es una igualdad siempre cierta, quiere decir que el sistema tiene infinitas soluciones, es compatible indeterminado, o que las rectas son la misma.
Infinitas soluciones. Las rectas coinciden
Lo expresaremos así. Como x = −2y − 3, dando valores a y se obtiene x. Así si le da-mos a y el valor arbitrario de λ (lambda), entonces expresaremos la solución como:
x=−2 λ –3y= λ siendo λ ∈R
y como λ puede ser cualquier número real, hay infinitas soluciones.
Estos son los únicos casos que pueden darse con dos ecuaciones y dos incógnitas, y su interpretación geométrica.
123
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Interpretación geométrica de los sistemas con 3 ecuaciones y 3 incógnitas
Como cada ecuación lineal con 3 incógnitas corresponde a un plano en el espacio, la solución del sistema corresponderá a la posición en que dichos planos estén en el es-pacio. Lo más sencillo es saber que ocurre con los planos 2 a 2, pues en el espacio dos planos solo pueden estar en 3 posiciones:
* Son coincidentes: Lo cual es fácil de saber porque sus correspondientes ecuaciones tienen coeficientes de las incógnitas y los términos independientes proporcionales, es decir, si los planos son:
α=Ax+By+Cz=Dβ=A +B y+C z=D
Entonces se verifica:
AA
= BB
= CC
= CC
(siempre que se puedan realizar las operaciones).
Por ejemplo:
Los planos 2 x+3 y−z=5 y −10 x−15 y+5 z=7 son secantes.
Puesto que podemos determinar la posición de los planos 2 a 2, podemos determinar en qué posición se encuentran los 3 a la vez, fijándonos en los casos:
1. Si el sistema es S.C.D. (Solución única), es que los tres planos se cortan en un punto, que es la solución del sistema.
124
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
2. Si el sistema es S.C.I. (Infinitas soluciones), puede ocurrir que:
a) Los tres planos se corten en una recta.b) Dos planos son coincidentes y el otro los corta en una recta.c) Los tres planos son coincidentes.
3. Si el sistema es S.I. (Sin solución), puede ocurrir que:
a) Los planos se cortan dos a dos.b) Dos planos son paralelos y el otro los corta.c) Los tres planos son paralelos.d) Dos planos son paralelos y el otro coincidente con uno de ellos.
125
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD NO. 24 METODOS DE SOLUCIÒN DE UN SISTEMA DE ECUACION LINEAL: GAUSS-JORDAN. INVERSA DE UNA MATRIZ. REGLA DE CRAMER.
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
ACTIVIDAD No. 24
METODOS DE SOLUCIÒN DE UN SISTEMA DE ECUACION LINEAL: GAUSS-JORDAN. INVERSA DE UNA MATRIZ. REGLA DE CRAMER.
GAUSS-JORDAN
La eliminación de Gauss-Jordán, más conocida como método de Gauss, es un método aplicable únicamente a los sistemas lineales de ecuaciones, y consistente en
126
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
triangular la matriz aumentada del sistema mediante transformaciones elementales, hasta obtener ecuaciones de una sola incógnita, cuyo valor será igual al coeficiente situado en la misma fila de la matriz. Este procedimiento es similar al anterior de reducción, pero ejecutado de manera reiterada y siguiendo un cierto orden algorítmico.
El Método de Gauss consiste en convertir un sistema normal de 3 ecuaciones con 3 incognitas en uno escalonado, en la que la primera ecuación tiene 3 incógnitas, la segunda ecuación tiene 2 incógnitas, y la tercera ecuación tiene 1 incógnita. De esta forma será fácil a partir de la última ecuación y subiendo, calcular el valor de las tres incógnitas.
En primer lugar, reducimos la incógnita x, sumando a la segunda fila, la primera
multiplicada por 32
, y a la tercera, la primera fila. La matriz queda así:
(2 1 −1 8
012
12
1
0 2 1 5)
El siguiente paso consiste en eliminar la incógnita y en la primera y tercera fila, para lo cual les sumamos la segunda multiplicada por y por , respectivamente.
(2 0 −1 6
012
12
1
0 2 −1 1)
Por último, eliminamos la z, tanto de la primera como de la segunda fila, sumándoles
la tercera multiplicada por -2 y por 12
, respectivamente:
127
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
(2 0 0 4
012
032
0 0 −1 1)
Llegados a este punto podemos resolver directamente las ecuaciones que se nos plantean:
2 x=4
y2=3
2
−z=1
O, si lo preferimos, podemos multiplicar las tres filas de la matriz por: 12
, 2 y -1
respectivamente, y obtener así automáticamente los valores de las incógnitas en la última columna.
X=2
Y=3
Z=−1
Pongamos un ejemplo del cálculo de un sistema de ecuaciones por el método de Gauss:
Se reúnen 30 personas entre hombres, mujeres y niños. Se sabe que entre los hombres y el triple de mujeres exceden en 20 el doble de los niños. También se sabe que entre hombres y mujeres se duplican al número de niños. Plantear y resolver el sistema de ecuaciones.
x= numeros de hombresy= numeros de mujeresz=numeros de niños
Se reúnen 30 personas entre hombres, mujeres y niños:
x + y + z = 30
128
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Se sabe que entre los hombres y el triple de mujeres exceden en 20 el doble de los niños:
x + 3y = 2z + 20
También se sabe que entre hombres y mujeres se duplican al número de niños:
x + y = 2z
Agrupando las tres ecuaciones tenemos el sistema, que ordenado resulta:
x+ y+z=30 x+ y+z=30
x+3 y=2 z+20 x+3 y−2 z=20
x+ y=2 z x+ y−2 z=0
Aplicamos Gauss, restando la primera ecuación a las dos siguientes:
x+ y+z=30
2 y−3 z=−10
−3 z=−30
En este caso en la tercera ecuación se ha eliminado la y, por lo que no es necesario hacer mas operaciones. Por lo tanto obtenemos que z = 10 de la tercera ecuación:
−3 z=−30 z=−30−3
z=10
Sustituyendo z en la segunda ecuación obtenemos que y = 10:
2 y−3 z=−10 z=10 2 y – 30=−10 2 y=20 y=10
Sustituyendo z é y en la primera ecuación obtenemos x = 10
x+ y+z=30 y=10
129
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
z=10
x+10+10=30 x=30−10−10 x=10
Con lo que hemos obtenido el resultado del sistema:
x+ y+z=30 x=10 x+3 y=2 z+20 y=10 x+ y=2 z z=10
INVERSA DE UNA MATRIZ
La teoría general de matrices encuentra una de sus aplicaciones más inmediatas en la resolución de sistemas de ecuaciones lineales con múltiples incógnitas. Aunque posteriormente fue objeto de un extenso desarrollo teórico, este campo de las mate-máticas surgió en realidad como un instrumento de cálculo para facilitar las operacio-nes algebraicas complejas.
Matriz identidad y matriz inversa
Dada una matriz cuadrada A de orden n x n (o, simplemente, n), se define matriz iden-tidad I como la que, con la misma dimensión n, está formada por elementos que son todos nulos salvo los situados en la diagonal principal, cuyo valor es 1. Es decir: A×I=I × A=A .
Para dicha matriz A de orden n, se dice que existe una matriz inversa A-1 también de orden n, cuando el producto de ambas es igual a la matriz identidad:
A× A−1=A−1× A=I .
Toda matriz que tiene inversa se dice invertible o regular, mientras que cuando carece de inversa se denomina matriz singular.
Para calcular la matriz inversa de una dada, puede recurrirse a la resolución de las ecuaciones que plantearía el producto de matrices A× X=I , siendo los coeficientes de A e I conocidos y los de X correspondientes a las incógnitas. También se puede aplicar el llamado método de reducción o gaussiano, según el siguiente esquema:
Dada la matriz original A = (aij), con i, j = 1, 2,…, n, se forma primero su matriz amplia-da (A | I).
130
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Después, se aplican operaciones elementales sobre las filas de la matriz hasta conse-guir reducir A a la matriz unidad. Las mismas transformaciones se van haciendo en I. La nueva matriz obtenida es A−1.
Las operaciones elementales que se pueden aplicar a las matrices ampliadas son:
Multiplicación de una fila por un número distinto de cero. Suma ordenada a los elementos de una fila del múltiplo de los de otra. Intercambio de filas.
Expresión matricial de un sistema de ecuaciones lineales
Cualquier sistema de ecuaciones lineales puede escribirse siempre en forma matricial de la siguiente forma:
Donde A es la matriz de los coeficientes, X la matriz de las incógnitas y B la matriz de los términos independientes.
Así, por ejemplo, el sistema de ecuaciones lineales:
Resolución de un sistema por la matriz inversa
Un procedimiento rápido para la resolución de sistemas de ecuaciones lineales me-diante matrices es el llamado método de la matriz inversa. Esta técnica consiste en multiplicar por la izquierda los dos miembros de la expresión matricial del sistema de ecuaciones por la matriz inversa de la de los coeficientes (si existe). De este modo:
Cuando la matriz de los coeficientes no es invertible, el sistema no tiene solución (es incompatible).
Sean A y B matrices de n x n, y suponiendo que la multiplicación AB = BA = Identidad, entonces la matriz B se le llama inversa de A, y se escribe A−1. De esta manera:
A A−1=A−1 A=I
De la definición anterior se deduce que(A-1)-1 = A, si A tiene inversa. Nosotros podemos conocer fácilmente si una matriz tiene inversa; basta con encontrar su determinante, y si resulta cero, no tiene inversa; cualquier otro número nos indica que tiene inversa.
131
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Para encontrar la inversa de una matriz puede resultar un poco difícil, dependiendo del tamaño de la misma. Un ejemplo sencillo se muestra a continuación. Sea:
A = (2 4 64 5 63 1 −2)
Encontrar la inversa de A o A−1.
Si tomamos la definición de inversa encontramos que A A−1=I , entonces:
(2 4 64 5 63 1 −2)(a b c
d e fg h i ) = (1 0 0
0 1 00 0 1)
Resolviendo encontramos:
(2a +4 d +6 g4a +5d +6 g3a +1d −2 g)(
2b +4e +6 h4 b +5e +6 h3b +1e −2h)(
2c +4 f +6 i4c +5 f +6 i3c +1 f +2i) = (1 0 0
0 1 00 0 1)
Igualando término a término, encontramos una serie de ecuaciones que al resolverlas obtenemos el resultado:
A-1 = (−83
73
−1
133
−113
2
−116
53
−1) METODO DE CRAMER
132
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Los sistemas que sean cuadrados y tales que su matriz de coeficientes tenga inversa (los sistemas que cumplen estas dos condiciones se llaman sistemas de Cramer ), se puede aplicar una regla muy sencilla para calcular la solución y que se basa en los determinantes, conocida como regla de Cramer. Si det(A) es cero, evidentemente la regla no se puede aplicar.
La regla de Cramer:
Para un sistema de Cramer (cuadrado y con matriz regular) se verifica que la incógni-ta número que se calcula dividiendo entre el determinante de A el determinante que resulta de sustituir la columna que (correspondiente al lugar que ocupe la incógnita que se está calculando) por la columna de términos independientes.
Ejemplo
Resolver el sistema2 x+ y−z=11x−3 y=−20
4 x+2 y+5 z=8
Como el sistema es de Cramer puesto que det(A) = −49, aplicamos la regla de Cra-mer:
Para x sustituimos la primera columna por la de términos independientes pues x es la primera incógnita:
X=[ 11 1 −1−20 −3 0
8 2 5 ] = −49−49
¿1
______________ −49
Para y sustituimos la segunda columna por la de términos independientes pues y es la segunda incógnita
Y = [ 11 1 −1−20 −3 0
8 2 5 ] = −343−49
= 7
______________ −49
Para z sustituimos la tercera columna por la de términos independientes pues z es la tercera incógnita).
133
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Z = [2 1 111 −3 −202 2 8 ]=
98−49
= -2
134
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD NO. 25 EJERCICIOS RESUELTOS POR LA REGLA DE CRAMER, GAUSS-JORDAN Y MATRIZ INVERSA
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 11 DE NOVIEMBRE DE 2011
Actividad No. 25
EJERCICIOS RESUELTOS POR LA REGLA DE CRAMER, GAUSS-JORDAN Y MATRIZ INVERSA
REGLA DE CRAMER
Sea el sistema de ecuaciones lineales formado por dos ecuaciones con dos incógnitas:
135
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
3 x−2 y=1 x+5 y=3
Encontrar el valor de x e y mediante la regla de Cramer.
Empezaremos con el primer paso, que consiste en hallar la matriz ampliada A b asociada al sistema de ecuaciones lineales:
x y x y b
A:b=(3 −21 5
⋮ 1⋮ 3)
Calcular el determinante de A. Así pues:
|A|=3.5 (−2.1 )=15+2=17
Último paso consiste en calcular las incógnitas:
|B|=1.5 (−2.3 )=11
|C|=3.3−1.1=9−1=8
B y
x=|1 −23 −5|
17=5+6
17=11
17
x b
y=|3 11 3|17
=9−117
= 817
GAUSS-JORDAN
A=( 2 4 310 −8 −94 4 −3)
136
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
La matriz aumentada del sistema es:
B=( 2 4 310 −8 −94 4 −3
302) ❑R1→
12R2
→ ( 1 4
32
10 −8 −94 4 −3
3202)
(1 432
0 −28 −244 4 −3
32
−152
) ❑R3→R 3−4 R1
→ (1 2
32
0 −28 −240 −4 −9
32
15−4
) ❑R2→R3
→
(1 232
0 −28 −240 −4 −9
32
15−4
) ❑R2→−14R2
→ (1 2
32
0 −28 −240 −4 −9
32
15−4
) ❑R3→R 3−28 R2
→
(1 232
0 194
0 0 −39
32113)
❑R3→
139
R3
→ (1 2
32
0 194
0 0 1
32113)
Por lo que el sistema de ecuaciones queda de la siguiente manera:
x1+2x2+32x3=
32→(1)
x2+94x3=1→(2)
x3=13→(3)
Por lo tanto:
x3=13
137
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Sustituyendo “x3” en (2):
x2+94 ( 1
3 )=1
x2+34=1
x2=1−34; x2=
14
Sustituyendo “x2” y “x3” en (1):
x1+214+ 3
2 ( 13 )=3
2
x1+12+1
2=3
2
x1+1=32
x1=32−1; x1=
12
Es decir, finalmente:
x1=12
x2=14
x3=13
MATRIZ INVERSA
138
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Si A x = b, entonces:
A=( 2 1 −11 −1 1
−3 2 −4) B=(−30
−3)Para comprobar si la matriz “A” es invertible:
detA=|−1 12 −4|−(−1 )|1 1
3 −4|+(−1 )| 1 1−3 2|=2 ( 4−2 )−(−4+3 )−(2−3)
detA=2 (2 )−(−1 )− (−1 )=4+1+1=6
Por lo tanto la matriz “A” es INVERTIBLE con solución única y determinante detA=6
El primer paso a realizar, será calcular los cofactores de la matriz “A”:
A11=¿|−1 1
2 −4|=(−1) (−4)−(1 ) (2)=4−2=2¿
A
12=¿−| 1 1−3 −4|=−(−4+3 )=−(−1 )=1¿
A
13=¿| 1 −1−3 2 |=2−3=−1¿
A
21=¿−|1 12 −4|=−(4+2)=−(−2)=2¿
A22=¿| 2 1
−3 −4|=−8−3=−11¿
A
23=−¿| 2 1−3 2|=−( 4+3)−(7 )=7¿
A
31=¿| 1 −1−1 1 |=1−1=0¿
A
32=−¿|2 −11 1 |=−(2+1)=−(3 )=−3¿
139
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
A33=¿|2 1
1 −1|=−2−1=−3¿
Por lo que la matriz “B” de cofactores es:
B=(2 1 −12 −11 −70 −3 −3)
Y con ello, puede obtenerse la matriz adjunta de “A” , definida en la siguiente expresión: AdjA=Bt
Por lo que al momento de sustituir, se obtiene:
AdjA=( 2 2 01 −11 −3
−1 −7 −3) Teniendo la matriz adjunta de “A” y su determinante, puede obtenerse la matriz inversa “A-1”:
A−1=16 ( 2 2 0
1 −11 −3−1 −7 −3)
A−1=(13
13
0
16
−116
−12
−16
−76
−12
)
140
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Si de despeja al vector matriz de incógnitas o variables del modelo matemático A x = b : x=A−1b Expresado en forma matricial, se obtiene lo siguiente:
x=(13
13
0
16
−116
−12
−16
−76
−12
)−30
−3
Por lo que los resultados finales son:
a=−1b=1 c=2 COMPROBACIÓN de los valores obtenidos:
JOptionPane.showMessageDialog(null,"B I E N V E N I D O AL P R O G R A M A","Instituto Tecnologico de Tapachula",JOptionPane.ERROR_MESSAGE);
JOptionPane.showMessageDialog(null,"ESTE PROGRAMA RESUELVE SISTEMA DE ECUACIONES DE 3 INCOGNITAS","<<EQUIPO #6>>",JOptionPane.INFORMATION_MESSAGE);
145
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
JOptionPane.showMessageDialog(null,"RECUERDA QUE PRIMERO TIENES QUE INGRESAR LA MATRIZ POR LO CUAL DEBES DE DIJITAR PRIMERAMENTE EL #1","<<EQUIPO #6>>",JOptionPane.INFORMATION_MESSAGE);
JOptionPane.showMessageDialog(null,"INGRESA LOS COEFICIENTES DE TU SISTEMA DE ECUACION\n INGRESA LOS VALORES POR FILA","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE);
a=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL PRIMER VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
b=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL SEGUNDO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
c=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL TERCER VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
d=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL CUARTO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
e=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL QUINTO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
f=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL SEXTO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
g=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL SEPTIMO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
h=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL OCTAVO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
i=Float.parseFloat(JOptionPane.showInputDialog(null," DAME EL NOVENO VALOR","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE));
j=((a*e)*i)+((b*f)*g)+((d*h)*c);
146
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
k=((c*e)*g)+((b*d)*i)+((f*h)*a);
l=j-k;
JOptionPane.showMessageDialog(null,"LA DETERMINANTE DE LA MATRIZ ES:" +l,"<<EQUIPO # 6>>",JOptionPane.INFORMATION_MESSAGE);
}
if(opc==2)
{
JOptionPane.showMessageDialog(null,"CALCULANDO LA ADJUNTA","<<EQUIPO # 6>>",JOptionPane.QUESTION_MESSAGE);
Actividad 28. Definición de espacio vectorial 153-160
Actividad 29. Definiciòn de subespacio vectorial y sus propiedades________________161-165Actividad 30. Combinación Lineal. Dependencia e independencia lineal 166-169Actividad 31. Base y dimensión de un espacio vectorial. Cambio de base 170-176Actividad 32. Espacio vectorial con producto interno y sus propiedades…………….....177-179Actividad 33. Base ortonormal. Proceso de ortonormalizacion de Gram-Schmidt……. 180-183Actividad 34. Ejercicios…………………………………………………………………….… 184-209Actividad 35. Proyecto de la unidad 4: Programa que suma vectores……………..… 210-213
150
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD NO. 28 DEFINICION DE ESPACIO VECTORIAL
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
151
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
TAPACHULA, CHIAPAS; 02 DE DICIEMBRE DE 2011
Actividad No. 28
DEFINICION DE ESPACIO VECTORIAL
En matemáticas, un espacio vectorial es una estructura algebraica creada a partir de
un conjunto no vacío, una operación interna (llamada suma, definida para los
elementos del conjunto) y una operación externa (llamada producto, definida entre
dicho conjunto y un cuerpo matemático), cumpliendo una serie de propiedades o
requisitos iniciales.
A los elementos de un espacio vectorial se les llama vectores y a los elementos del
cuerpo, escalares.
Un vector (también llamado vector euclidiano o vector geométrico) es una herramienta
geométrica utilizada para representar una magnitud física definida por un modulo (o
longitud) y una dirección (u orientación).
Los vectores se pueden representar geométricamente como segmentos de recta
dirigidos o flechas en el plano o en el espacio.
Ejemplos:
• La velocidad con que se desplaza un móvil es una magnitud vectorial, ya que
no queda definida tan sólo por su módulo (lo que marca el velocímetro, en el
caso de un automóvil), sino que se requiere indicar la dirección hacia la que se
dirige.
• La fuerza que actúa sobre un objeto es una magnitud vectorial, ya que su
efecto depende, además de su intensidad o módulo, de la dirección en la que
opera.
• El desplazamiento de un objeto.
152
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
Se denomina escalar a los números reales o complejos que sirven para describir un
fenómeno físico con magnitud, pero sin la característica vectorial de dirección.
Formalmente es un tensor de rango cero.
En términos matemáticos, se llama escalar a los elementos de un cuerpo (en algunos
casos también a los elementos de un anillo), generalmente números, y en particular
se usa cuando se quiere distinguirlos claramente de los vectores en el álgebra lineal y
en cualquier rama que use módulos o espacios vectoriales.
Espacio Euclidiano Dimensional
Si n es un entero positivo, entonces una n-ada ordenada es una sucesión de n
números reales (a1 ,a2 ,….an ). El conjunto de todas las n-adas ordenadas se conoce
como espacio n dimensional y se denota por Rn.
Cuando n=2, o bien, 3, es común usar los términos “pareja ordenada” y “terna
ordenada”, en lugar de 2-ada y 3-ada ordenadas. Cuando n=1, cada n-ada ordenada
consta de un número real y, por tanto R1 se puede concebir como el conjunto de los
números reales.
(a1 ,a2 , a3 )
(a1 ,a2 , a3 )
Se dice que dos vectores u=(u1 , u2 ,……un ) y v=(v1 , v2 ,……vn ) en Rn son iguales si:
u1=v1 . u2=u2,… ..un=vn
La suma de u + v se define por:
u+v=(u1+v1 , u2+v2 ,… ..un+vn )
Y si k es cualquier escalar, el múltiplo escalar ku se define por
153
a b
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ku=(ku1 ,ku2 ,……,kun )
Las operaciones de adición y multiplicación escalar dadas en esta definición se
denominan operaciones estándar sobre Rn. Se define el vector cero en Rn como el
vector.
0=(0,0 ,… .. ,0 )
Si u=(u1 ,u2 ,…. ,un ) es un vector cualquiera en Rn, entonces el negativo (o inverso
aditivo) de u se denota por –u y se define por:
−u=(−u1 ,−u2 ,…. ,−un )
Se define la sustracción de vectores en Rn por v – u = v + (-u) o, en términos de las
1.- Se escribe T :V →W para indicar que T toma el espacio vectorial real V y lo lleva al
espacio vectorial real W; esto es, T es una función con V como su dominio y un
subconjunto de W como imagen.
2.- Se escribe indistintamente Tv y T(v). Denotan lo mismo; las dos se leen “T de v”.
Esto es análogo a la notación funcional f(x), que se lee “f de x”.
Ejemplo
Sean V Y W dos espacios vectoriales cualesquiera. La aplicación T :V →W tal que
T ( v )=0 para todo v en V es una transformación lineal conocida como transformación
cero. A fin de ver que T es lineal, obsérvese que
T (u+v )=0 ,T (u )=0 , T ( v )=0T (ku )=0
Por lo tanto
T (u+v )=T (u )+T ( v ) y T (ku )=kT (u)
Ejemplo
Sea V cualquier espacio vectorial. La aplicación T :V →V definida por T ( v )=v se
conoce como transformación identidad sobre V.
Si, T :V →V es una transformación lineal de un espacio vectorial Ven sí mismo,
entonces T es un operador lineal sobre V.
216
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
ALGEBRA LINEAL
PROF. M.C JOSÈ LUIS RUIZ MALDONADO
ACTIVIDAD NO. 37 PROPIEDADES DE LAS TRANSFORMACIONES LINEALES: IMAGEN Y NUCLEO
EQUIPO No. 6
GUILLERMO MORALES MALDONADO 11510163
SWITMY MAYUMI ALVAREZ RUIZ 11510226
HIPOLITO MAGDALENO DOMINGUEZ 11510154
CHRISTIAN GONZALO JIMENEZ ANCHEYTA 11510219
Aula Martes Miércoles Viernes
M3 15-17 15-16 15-17
SEGUNDO SEMESTRE
ING. EN SISTEMAS COMPUTACIONALES
217
INSTITUTO TECNOLOGICO DE TAPACHULA ALGEBRA LINEAL
TAPACHULA, CHIAPAS; 06 DE DICIEMBRE DE 2011
ACTIVIDAD No.37
PROPIEDADES DE LAS TRANSFORMACIONES LINEALES:IMAGEN Y NUCLEO
Teorema 1
Sea T :V →W una transformación lineal. Entonces para todos los vectores
u , v , v1 v2 ,…………… ..vn en V y todos los escalares a1, a2 ,……… ..an :
i. T(0) = 0
ii. T(u – v) = Tu – Tv
iii. T(a1 v1+a2 v2+… ..+an vn=a1T v1+a2T v2+……+anT vn
Nota:
En la parte de i el cero de la izquierda es el vector cero en V, mientras que el cero de
la derecha es el vector cero en W.
Demostracion.-
i. T (0)=T (0+0)=T (0)+T (0) .
Asi 0=T (0)– T (0)=T (0)+T (0) –T (0)=T (0)
ii. T(u – v) = T[u + (-1)v] = Tu + T[(-1)v] = Tu + (-1)Tv = Tu – Tviii. Esta parte se prueba por inducción. Para n = 2 se tiene T ¿ = T ¿ . Así la ecuación
(1) se cumple para n = 2. Se supone que se cumple para n = k, y se prueba para