75
UNIVERSIDAD LOS ANGELES DE CHIMBOTE ESCUELA PROFESIONAL DE INGENIERIA DE SISTEMAS TRABAJO DE FISICA I PROF. : ING. EDWARD HERRERA FARFAN ALUMNO : CESAR ENRIQUE FEIJOO ACOSTA

UNIVERSIDAD LOS ANGELES DE CHIMBOTE
ESCUELA PROFESIONAL DE INGENIERIA DE SISTEMAS
TRABAJO DE FISICA I
PROF. : ING. EDWARD HERRERA FARFAN
ALUMNO : CESAR ENRIQUE FEIJOO ACOSTA
CONTENIDO
I.- FISICA
II.- MAGNITUDES FISICAS
III.- SISTEMA DE UNIDADES
IV.- NOTACION EXPONENCIAL
V.- ANALISIS DIMENSIONAL
VI.- VECTORES
I.- FISICA
1.- CONCEPTO
2.- FENOMENO
3.- DIVISION DE LA FISICA.
4.- PARTES DE LA FISICA.
I.- FISICA1.- CONCEPTO : Es una ciencia cuyo objetivo es el
estudio de la materia, componentes e interacciones. Es una ramade la Ciencia de tipo experimental, que observa, estudia y gobiernamediante leyes, los denominados Fenómenos Físicos.
2.- FENOMENO : Es el cambio o modificación que sufre
la materia, bajo la influencia de las diversas formas de energía,existen muchos fenómenos de los cuales solo mostraremos lossgtes:
FENOMENO FISICO.
FENOMENO QUIMICO.
FENOMENO ALOTROPICO.
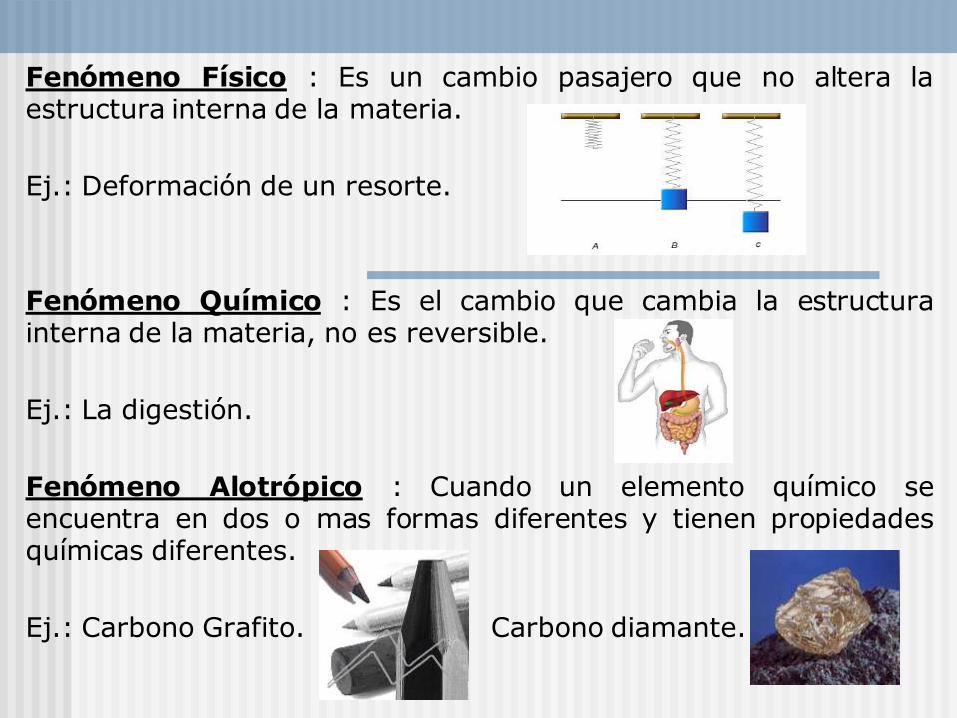
Fenómeno Físico : Es un cambio pasajero que no altera laestructura interna de la materia.
Ej.: Deformación de un resorte.
Fenómeno Químico : Es el cambio que cambia la estructurainterna de la materia, no es reversible.
Ej.: La digestión.
Fenómeno Alotrópico : Cuando un elemento químico seencuentra en dos o mas formas diferentes y tienen propiedadesquímicas diferentes.
Ej.: Carbono Grafito. Carbono diamante.
3.- DIVISION DE LA FISICA : Las ramas principales de la
Física se pueden dividiren dos :
La Física Clásica y la Física Moderna.
La primera se encarga del estudio de aquellos fenómenos que tienen una velocidad
relativamente pequeña comparada con la velocidad de la luz y cuyas escalas
espaciales son muy superiores al tamaño de átomos y moléculas.
La segunda se encarga de los fenómenos que se producen a la velocidad de la luz o
valores cercanos a ella o cuyas escalas espaciales son del orden del tamaño del
átomo o inferiores y fue desarrollada en los inicios del Siglo XX.
3.- PARTES DE LA FISICA : Tenemos :
MECANICA.
CALORIMETRIA.
ACUSTICA.
ELECTRICIDAD.
OPTICA.
MAGNETISMO.
ELECTROMAGNETISMO.
FISICA NUCLEAR.
FISICA MODERNA.
MECANICA
La mecánica es la rama de la física que se encarga de estudiar elestado de reposo y movimiento de los cuerpos. El conjunto dedisciplinas que abarca la mecánica convencional es muy amplio yes posible agruparlas en tres bloques principales:
Mecánica clásica : Se subdivide en :
Cinemática (también llamada Geometría del movimiento), que seocupa del movimiento de los cuerpos sin considerar las causas quelo originan.
Dinámica, que describe el movimiento estudiando las causas desu origen.
Mecánica de medios continuos: Que engloba a mecánica desólidos deformables y la mecánica de fluidos.
Mecánica no convencional: Que incluye efectos relativistas ycuánticos.
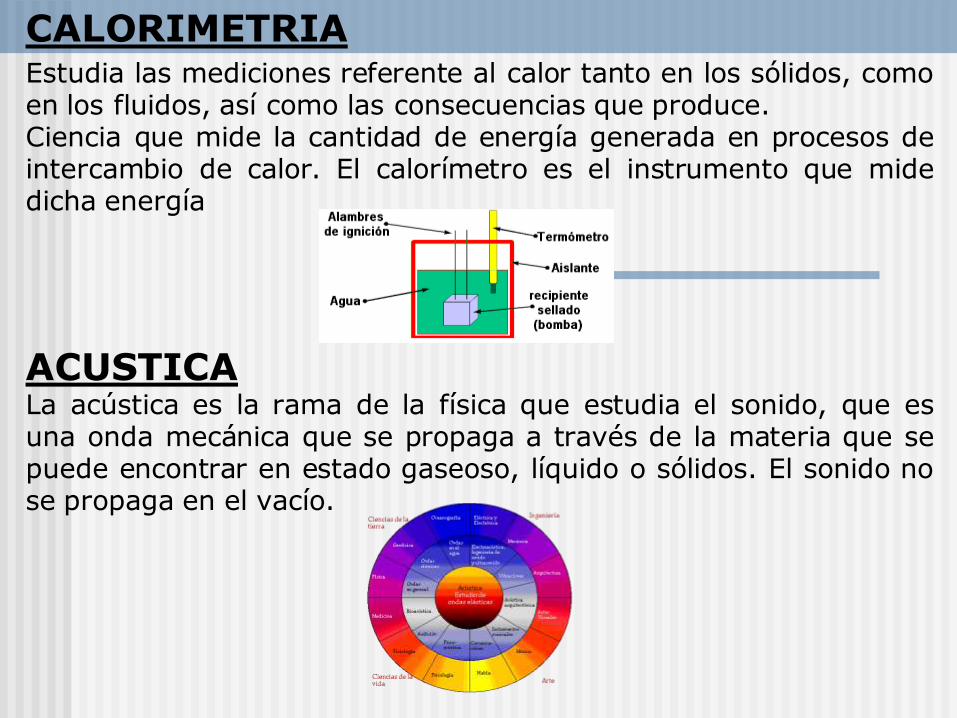
CALORIMETRIAEstudia las mediciones referente al calor tanto en los sólidos, comoen los fluidos, así como las consecuencias que produce.Ciencia que mide la cantidad de energía generada en procesos deintercambio de calor. El calorímetro es el instrumento que midedicha energía
ACUSTICALa acústica es la rama de la física que estudia el sonido, que esuna onda mecánica que se propaga a través de la materia que sepuede encontrar en estado gaseoso, líquido o sólidos. El sonido nose propaga en el vacío.
ELECTRICIDADLa Electricidad es la rama de la física que estudia, elefecto que producen los electrones al trasladarse de unpunto a otro.
OPTICAÓptica, rama de la física que se ocupa de la propagación y elcomportamiento de la luz. En un sentido amplio, la luz es la zonadel espectro de radiación electromagnética que se extiende desdelos rayos X hasta las microondas, e incluye la energía radiante queproduce la sensación de visión. El estudio de la óptica se divide endos ramas, la óptica geométrica y la óptica física
MAGNETISMOMagnetismo, uno de los aspectos del electromagnetismo, que esuna de las fuerzas fundamentales de la naturaleza. Las fuerzasmagnéticas son producidas por el movimiento de partículascargadas, como por ejemplo electrones, lo que indica la estrecharelación entre la electricidad y el. La manifestación más conocidadel magnetismo es la fuerza de atracción o repulsión que actúaentre los materiales magnéticos como el hierro. Sin embargo, entoda la materia se pueden observar efectos más sutiles delmagnetismo.
ELECTROMAGNETISMOEstudia la interacción entre los campos eléctricos y magnéticos
FISICA NUCLEARLa física nuclear es una rama de la física que estudia laspropiedades y el comportamiento de los núcleos atómicosespecialmente los núcleos radiactivos, y sus reacciones con losneutrones y otros núcleos. La física nuclear es conocidamayoritariamente por la sociedad en su papel en la energía nuclearen centrales nucleares y en el desarrollo de armas nucleares, tantode fisión como de fusión nuclear. En un contexto más amplio, sedefine la física nuclear y física de partículas como la rama de lafísica que estudia la estructura fundamental de la materia y lasinteracciones entre partículas subatómicas.
FISICA MODERNA
Dos importantes avances producidos durante el primer tercio delsiglo XX —la teoría cuántica y la teoría de la relatividad explicaronestos hallazgos, llevaron a nuevos descubrimientos y cambiaron elmodo de comprender la Fisíca.La física moderna comienza desde comienzos del siglo XX, cuando elalemán Max. Planck, investiga sobre el ―cuanto‖ de energía, Planckdecía que eran partículas de energía invisibles, y que éstas no erancontinuas como lo decía la física clásica, por ello nace esta nuevarama de la física que estudia las manifestaciones que se producen enlos átomos, los comportamientos de las partículas que forman lamateria y las fuerzas que las rigen. (También se le llama físicacuántica).En 1905, Albert Einstein, publicó una serie de trabajos querevolucionaron la física de ese entonces, que trataban de ―Ladualidad onda-partícula de la luz‖, ―La teoría de la relatividad‖ entreotros
II.- MAGNITUDES FISICAS
1.- CONCEPTO.
2.- CLASIFICACION
II.- MAGNITUDES FISICAS
1.- CONCEPTO : Es todo aquello que se puede medir. Es
todo aquello que se puede expresar cuantitativamente, dicho deotra manera es susceptible a ser medido.
2.- CLASIFICACION : Se clasifican por :
POR SU ORIGEN.
POR SU NATURALEZA
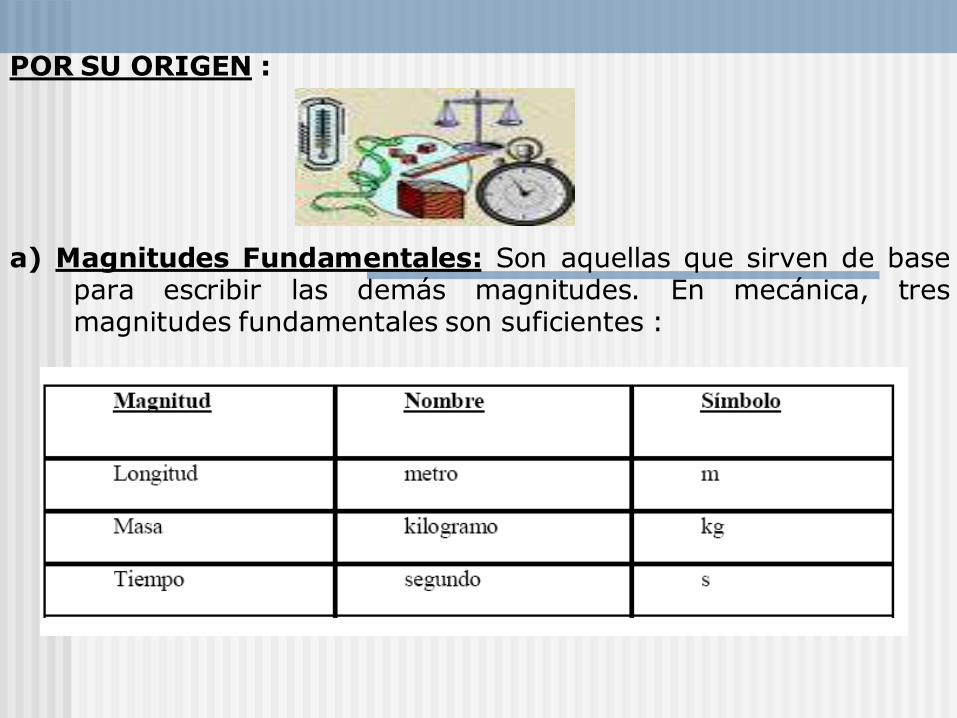
POR SU ORIGEN :
a) Magnitudes Fundamentales: Son aquellas que sirven de basepara escribir las demás magnitudes. En mecánica, tresmagnitudes fundamentales son suficientes :
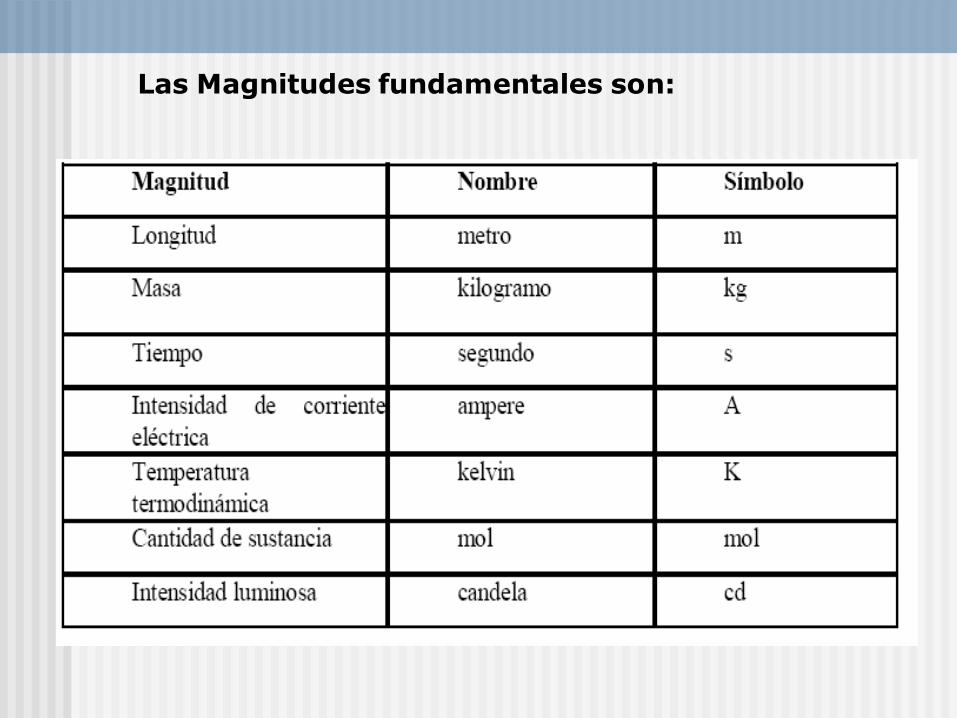
Las Magnitudes fundamentales son:
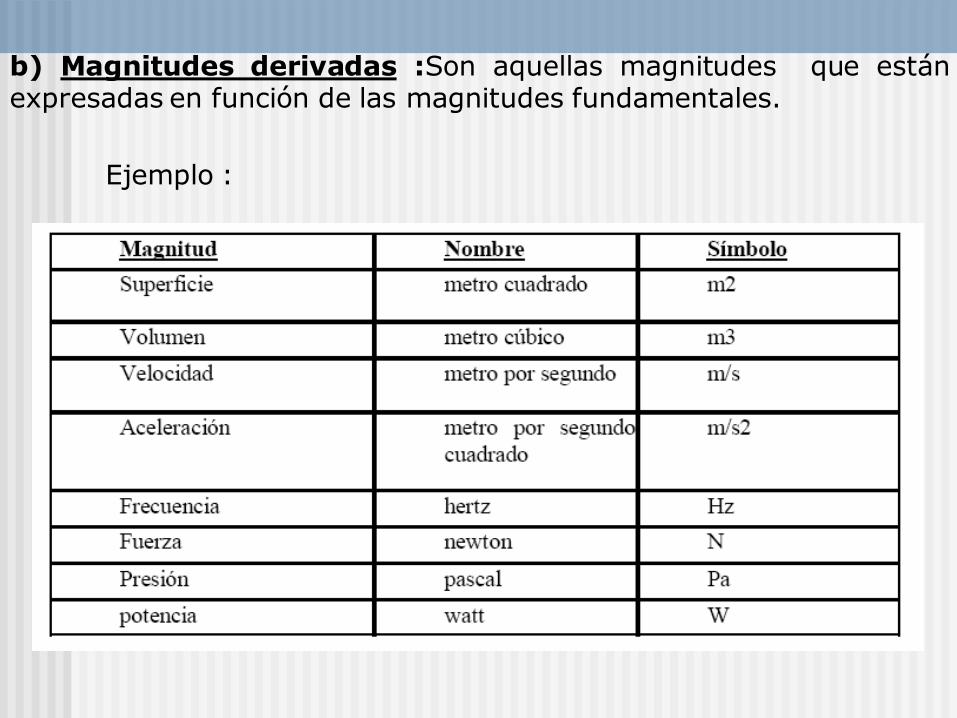
b) Magnitudes derivadas :Son aquellas magnitudes que estánexpresadas en función de las magnitudes fundamentales.
Ejemplo :
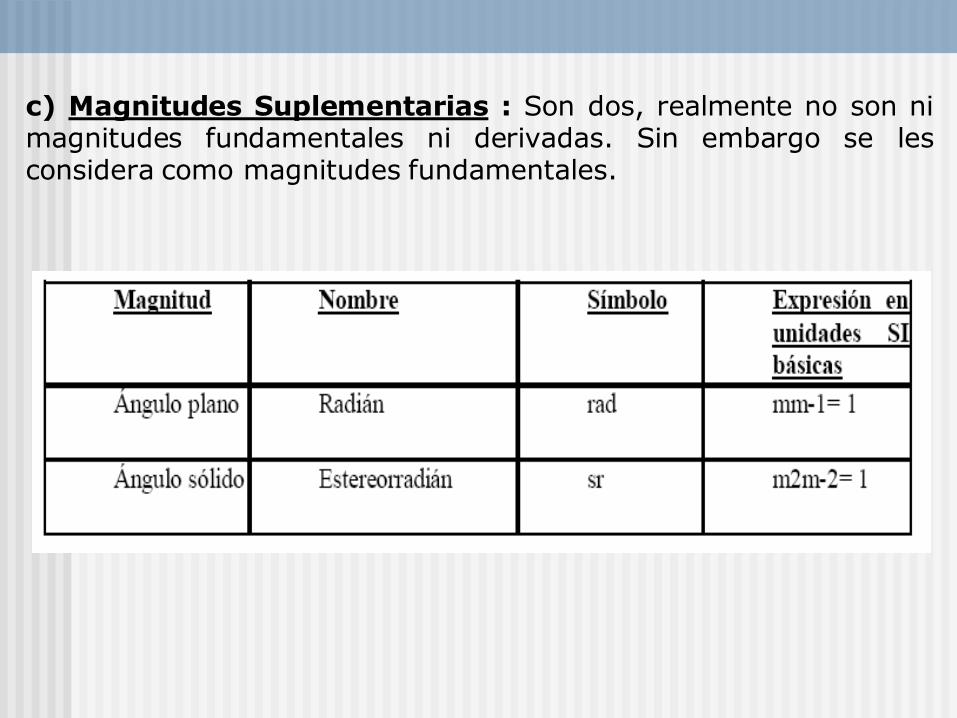
c) Magnitudes Suplementarias : Son dos, realmente no son nimagnitudes fundamentales ni derivadas. Sin embargo se lesconsidera como magnitudes fundamentales.
Magnitudes Suplementarias
Unidad de ángulo plano : El radián (rad) es el ángulo planocomprendido entre dos radios de un círculo que, sobre lacircunferencia de dicho círculo, interceptan un arco de longitudigual a la del radio. ( Angulo plano (j))
Unidad de ángulo sólido : El estereorradián (sr) es el ángulosólido que, teniendo su vértice en el centro de una esfera,intercepta sobre la superficie de dicha esfera un área igual a la deun cuadrado que tenga por lado el radio de la esfera. ( Angulosólido ( Ω ) ).
POR SU NATURALEZA :
a) Magnitudes escalares: Son aquellas magnitudes que estánperfectamente determinadas con solo conocer su valor numéricoy su respectiva unidad.Se caracterizan por un valor fijo independiente del observador ycarecen de dirección y sentido, como por ejemplo, la masa. Enfísica clásica la masa, la energía, la temperatura o la densidadde un cuerpo son magnitudes escalares ya que contienen unvalor fijo para todos los observadores (en cambio en teoría de larelatividad la energía o la temperatura dependen del observadory por tanto no son escalares).
- Tiempo - Volumen- Temperatura - Densidad.
b) Magnitudes Vectoriales : Son aquellas magnitudes queademás de conocer su valor numérico y su unidad, senenecita la dirección y sentido para que dicha magnitudquede perfectamente determinada.
- La Velocidad - La Aceleración- La Fuerza - Etc.
C) Tensoriales : Un reducido grupo de magnitudes secaracterizan por que para quedar plenamente identificadasrequieren de un numero, de una unidad física y además deuna ubicación especifica en el espacio.
Entre ellas tenemos:
La presión y la temperatura.
III.- SISTEMA DE UNIDADES
1.- CONCEPTO.
2.- TIPOS DE UNIDADES.
III.- SISTEMA DE UNIDADES
1.- CONCEPTO : La necesidad de tener una unidad
homogénea para determinar magnitud, obliga al hombre a definir
unidades convencionales.
2.- TIPOS DE UNIDADES : Tenemos :
Unidades Básicas.
Unidades Derivadas
Unidades Suplementarias.
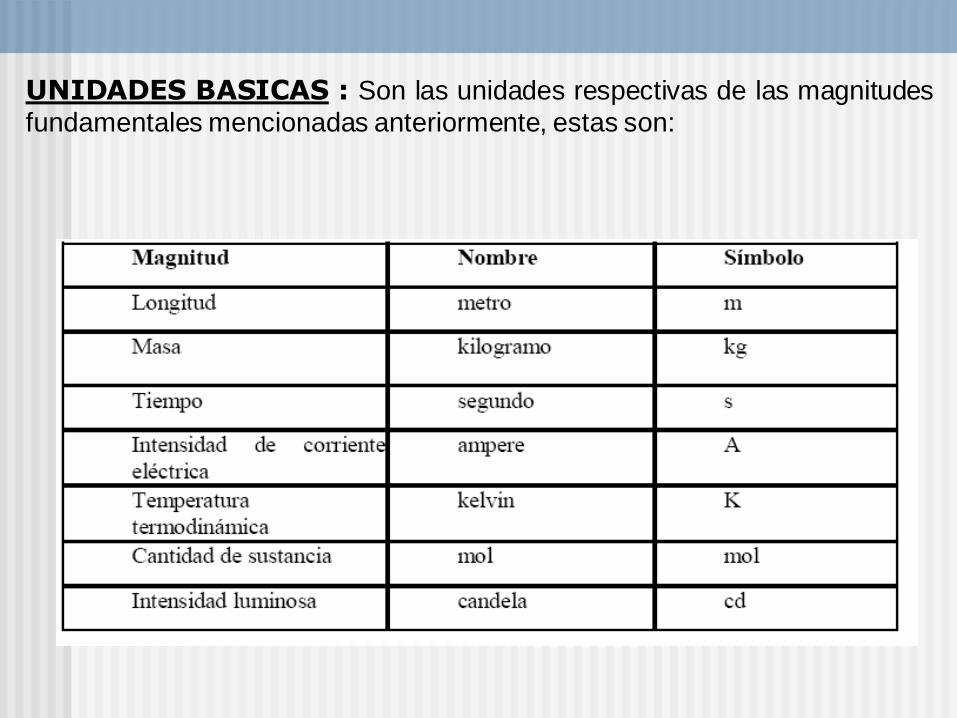
UNIDADES BASICAS : Son las unidades respectivas de las magnitudes
fundamentales mencionadas anteriormente, estas son:
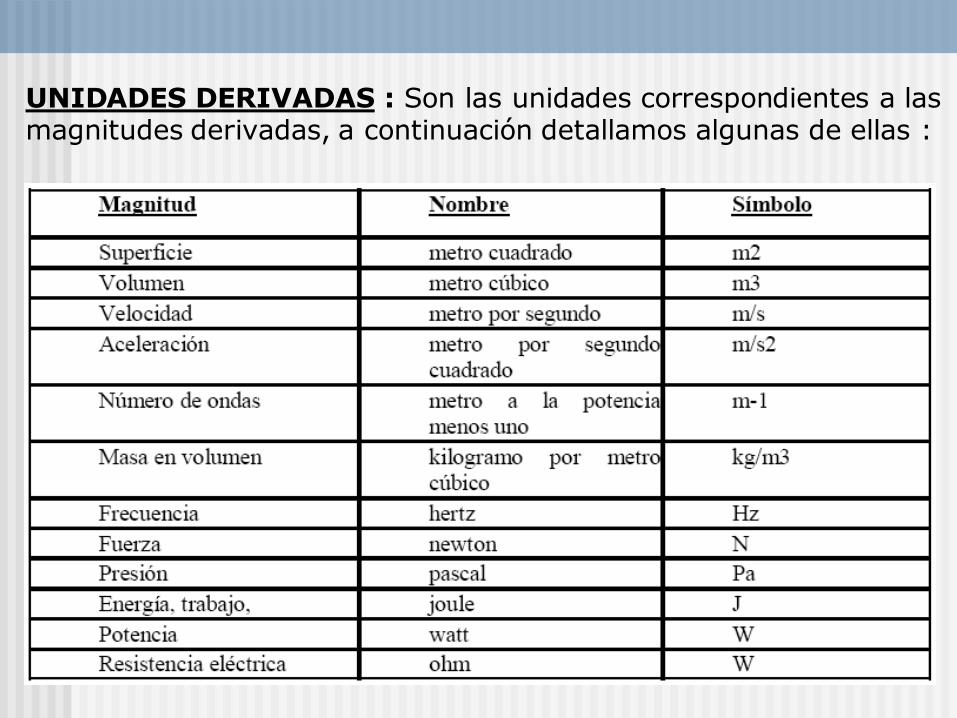
UNIDADES DERIVADAS : Son las unidades correspondientes a lasmagnitudes derivadas, a continuación detallamos algunas de ellas :
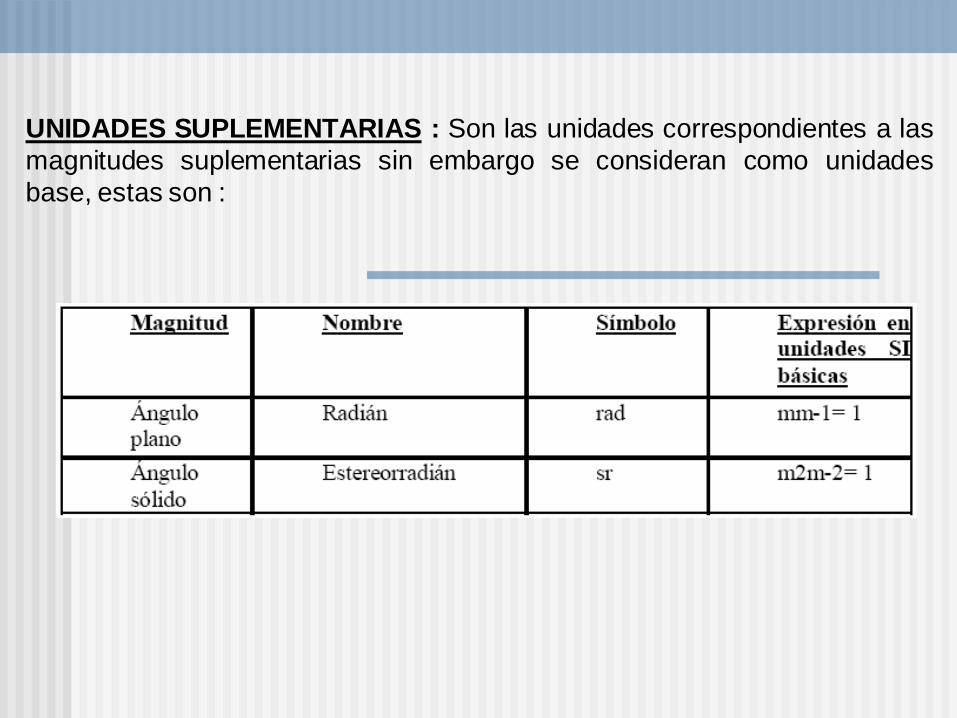
UNIDADES SUPLEMENTARIAS : Son las unidades correspondientes a las
magnitudes suplementarias sin embargo se consideran como unidades
base, estas son :
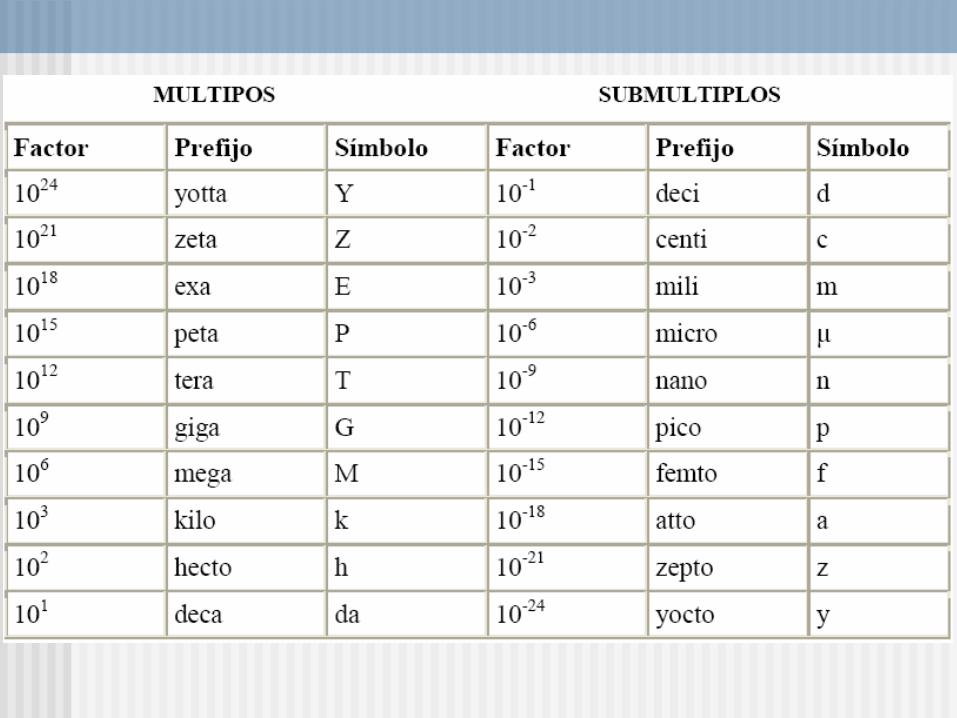
IV.- NOTACION EXPONENCIAL
MULTIPLOS Y SUBMULTIPLOS
En la física es común usar números grandes pero también números muy
pequeños, para simplificarse se hace uso de los múltiplos :
V.- ANALISIS DIMENSIONAL
1.- DIMENSIONES
2.- SISTEMA INTERNACIONAL DE UNIDADES
3.- FORMULA DIMENSIONAL.
4.- FORMULAS DIMENSIONALES BASICAS.
5.-PRINCIPIO DE HOMOGENEIDAD
DIMENSIONAL.
6.- APLICACIONES : CASOS ESPECIALES.
V.- ANALISIS DIMENSIONAL
1.- DIMENSIONES : Es parte de la FÍSICA que
estudia las relaciones entre las magnitudes fundamentales yderivadas, en el Sistema Internacional de Unidades, el cualconsidera siete magnitudes fundamentales. Las magnitudesfundamentales son: longitud, masa, tiempo, temperatura,intensidad de corriente eléctrica, intensidad luminosa ycantidad de sustancia. Las magnitudes derivadas son: área,volumen, densidad, velocidad, aceleración, fuerza, trabajo,potencia, energía, etc.

2.- SISTEMA INTERNACIONAL DE
UNIDADES
3.-FÓRMULA DIMENSIONAL : Es aquella igualdad
matemática que muestra la relación que existe entre una magnitudderivada y las magnitudes fundamentales. La DIMENSIÓN de unamagnitud física se representa del siguiente modo:
Sea A la magnitud física.
[A] : se lee, dimensión de la magnitud física A.
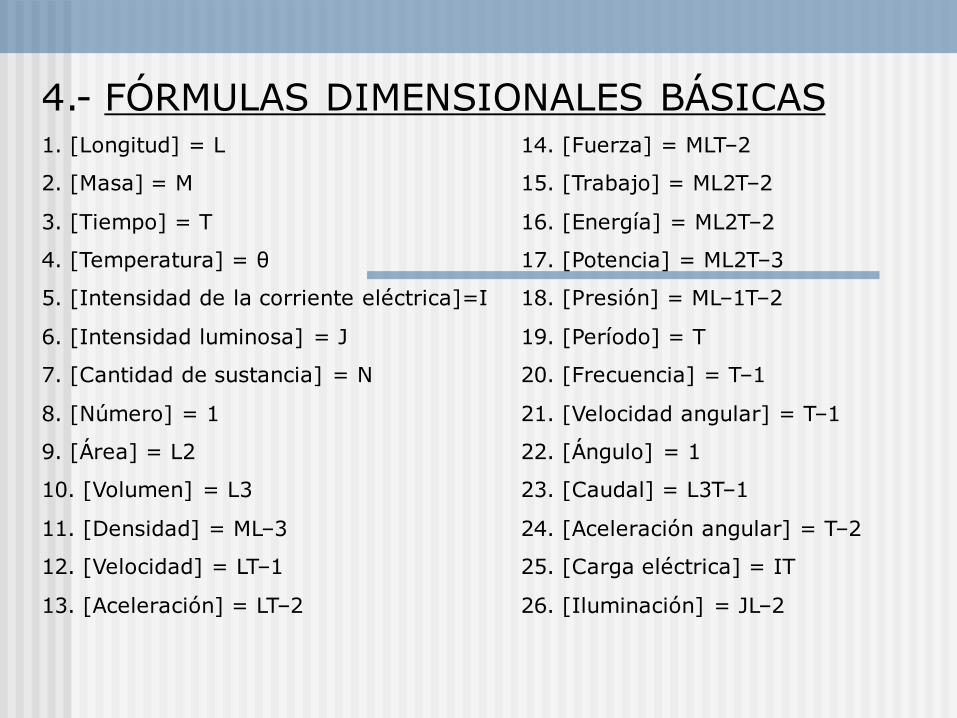
4.- FÓRMULAS DIMENSIONALES BÁSICAS1. [Longitud] = L 14. [Fuerza] = MLT–2
2. [Masa] = M 15. [Trabajo] = ML2T–2
3. [Tiempo] = T 16. [Energía] = ML2T–2
4. [Temperatura] = θ 17. [Potencia] = ML2T–3
5. [Intensidad de la corriente eléctrica]=I 18. [Presión] = ML–1T–2
6. [Intensidad luminosa] = J 19. [Período] = T
7. [Cantidad de sustancia] = N 20. [Frecuencia] = T–1
8. [Número] = 1 21. [Velocidad angular] = T–1
9. [Área] = L2 22. [Ángulo] = 1
10. [Volumen] = L3 23. [Caudal] = L3T–1
11. [Densidad] = ML–3 24. [Aceleración angular] = T–2
12. [Velocidad] = LT–1 25. [Carga eléctrica] = IT
13. [Aceleración] = LT–2 26. [Iluminación] = JL–2
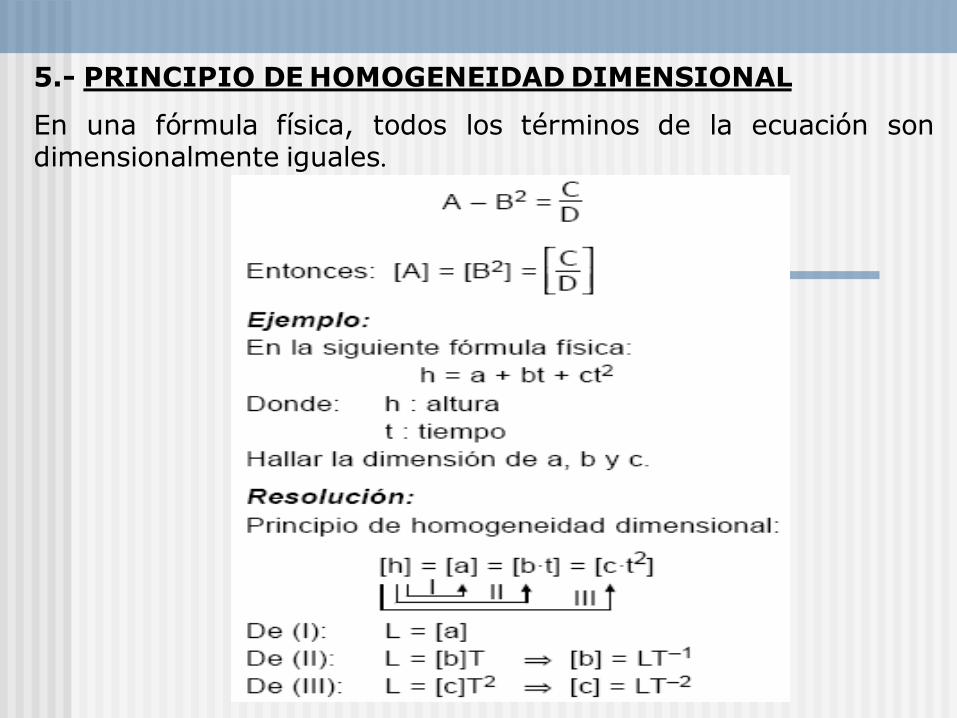
5.- PRINCIPIO DE HOMOGENEIDAD DIMENSIONAL
En una fórmula física, todos los términos de la ecuación sondimensionalmente iguales.
6.- APLICACIONES:CASOS ESPECIALES
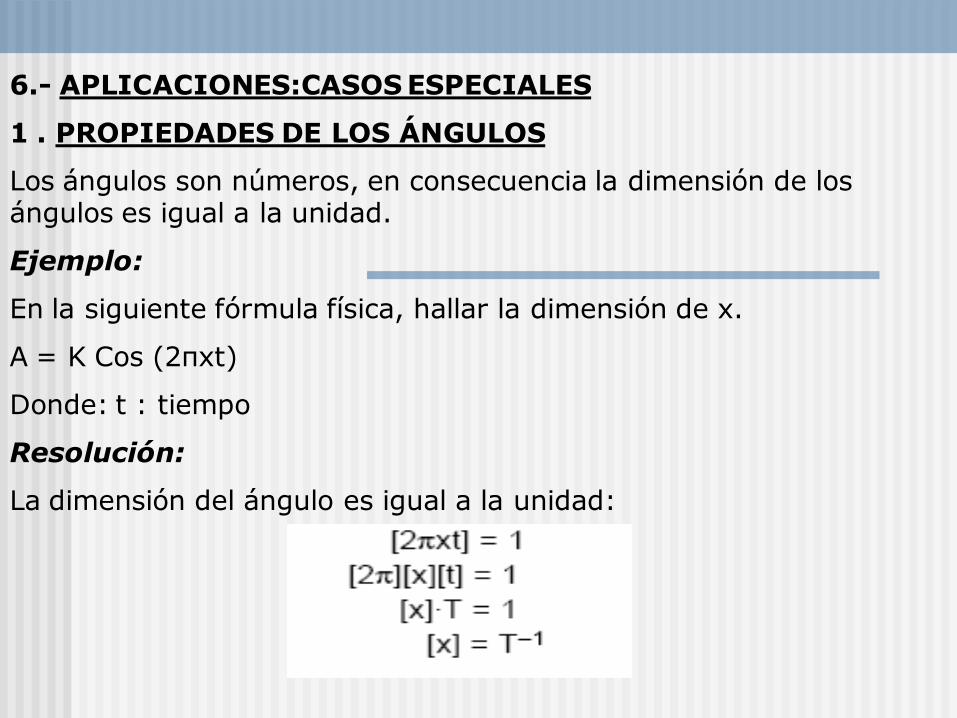
1 . PROPIEDADES DE LOS ÁNGULOS
Los ángulos son números, en consecuencia la dimensión de losángulos es igual a la unidad.
Ejemplo:
En la siguiente fórmula física, hallar la dimensión de x.
A = K Cos (2πxt)
Donde: t : tiempo
Resolución:
La dimensión del ángulo es igual a la unidad:
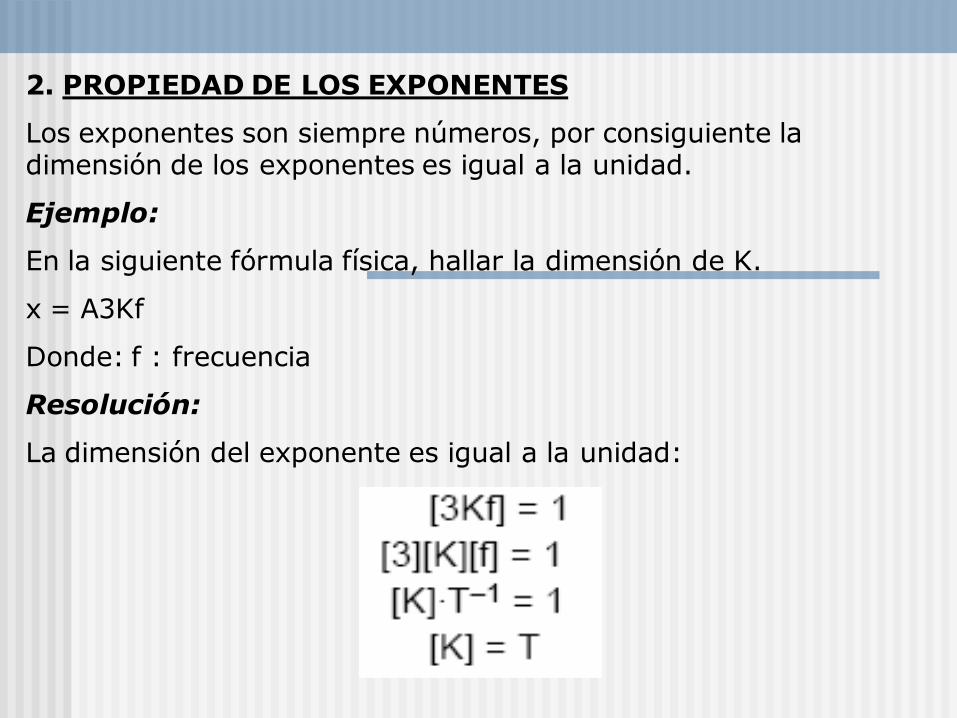
2. PROPIEDAD DE LOS EXPONENTES
Los exponentes son siempre números, por consiguiente ladimensión de los exponentes es igual a la unidad.
Ejemplo:
En la siguiente fórmula física, hallar la dimensión de K.
x = A3Kf
Donde: f : frecuencia
Resolución:
La dimensión del exponente es igual a la unidad:
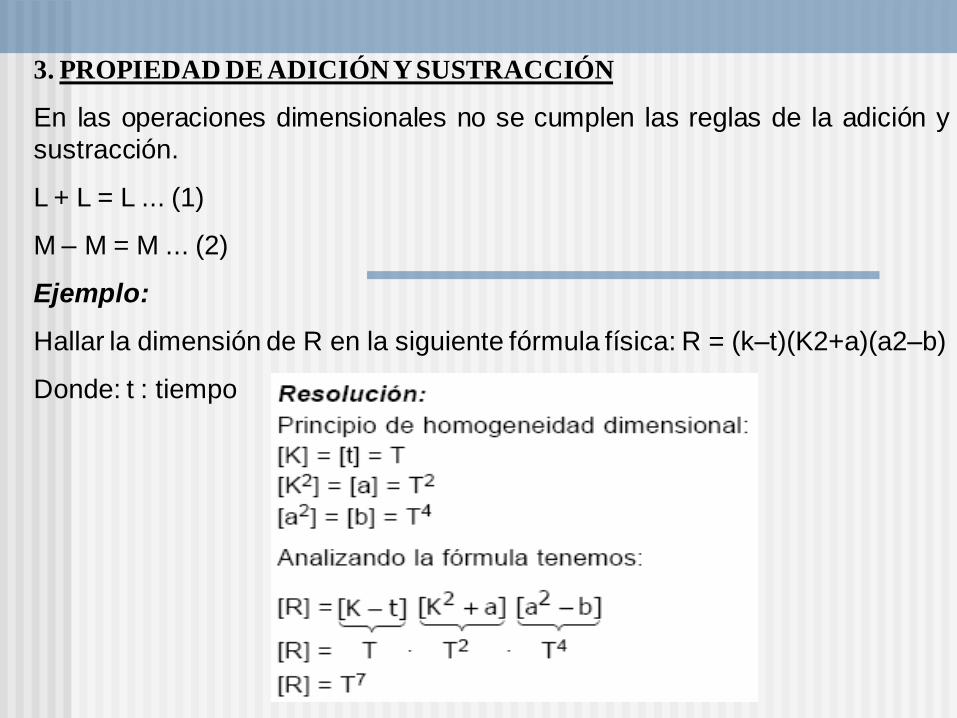
3. PROPIEDAD DE ADICIÓN Y SUSTRACCIÓN
En las operaciones dimensionales no se cumplen las reglas de la adición y
sustracción.
L + L = L ... (1)
M – M = M ... (2)
Ejemplo:
Hallar la dimensión de R en la siguiente fórmula física: R = (k–t)(K2+a)(a2–b)
Donde: t : tiempo
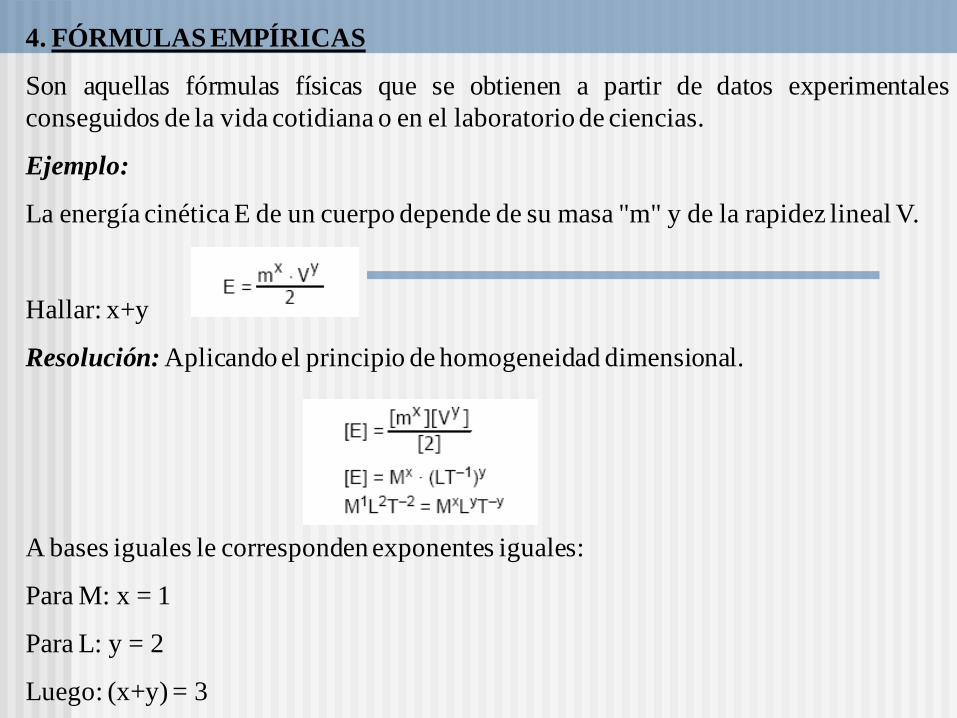
4. FÓRMULAS EMPÍRICAS
Son aquellas fórmulas físicas que se obtienen a partir de datos experimentales
conseguidos de la vida cotidiana o en el laboratorio de ciencias.
Ejemplo:
La energía cinética E de un cuerpo depende de su masa "m" y de la rapidez lineal V.
Hallar: x+y
Resolución: Aplicando el principio de homogeneidad dimensional.
A bases iguales le corresponden exponentes iguales:
Para M: x = 1
Para L: y = 2
Luego: (x+y) = 3
VI.- VECTORES
VECTOR
Es un segmento de línea recta orientada que sirve para representar a las magnitudes vectoriales.
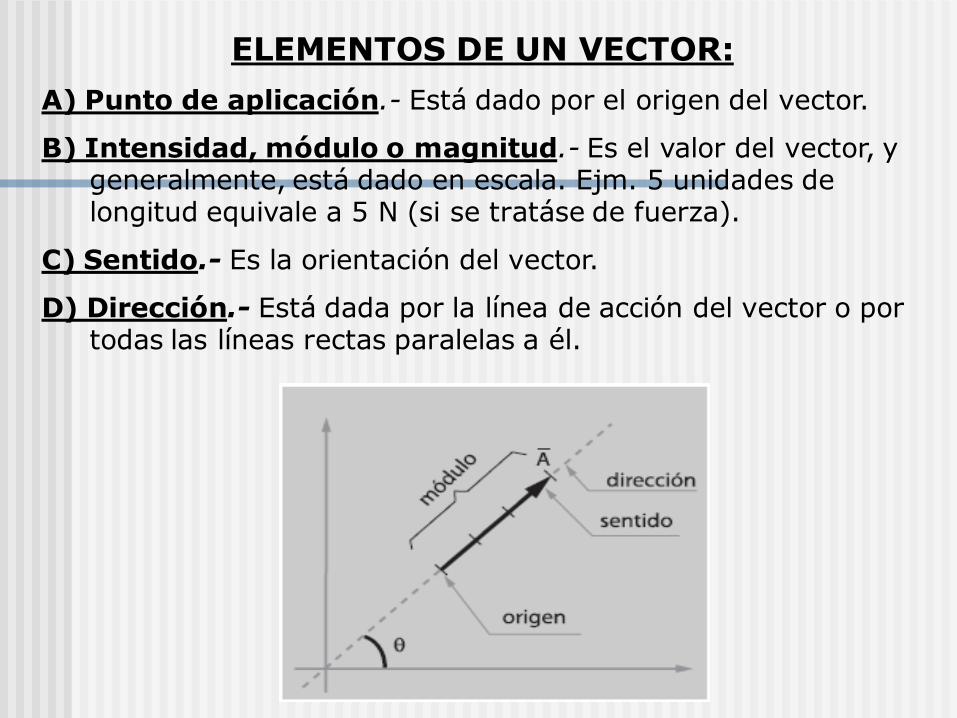
ELEMENTOS DE UN VECTOR:
A) Punto de aplicación.- Está dado por el origen del vector.
B) Intensidad, módulo o magnitud.- Es el valor del vector, y generalmente, está dado en escala. Ejm. 5 unidades de longitud equivale a 5 N (si se tratáse de fuerza).
C) Sentido.- Es la orientación del vector.
D) Dirección.- Está dada por la línea de acción del vector o por todas las líneas rectas paralelas a él.
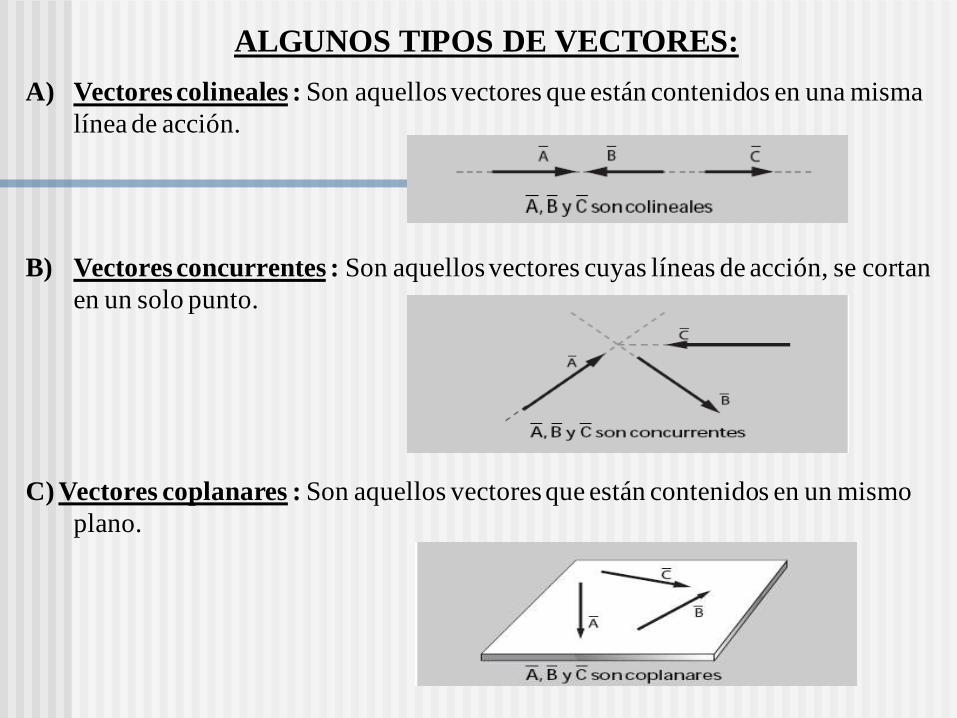
ALGUNOS TIPOS DE VECTORES:
A) Vectores colineales : Son aquellos vectores que están contenidos en una misma
línea de acción.
B) Vectores concurrentes : Son aquellos vectores cuyas líneas de acción, se cortan
en un solo punto.
C) Vectores coplanares : Son aquellos vectores que están contenidos en un mismo
plano.
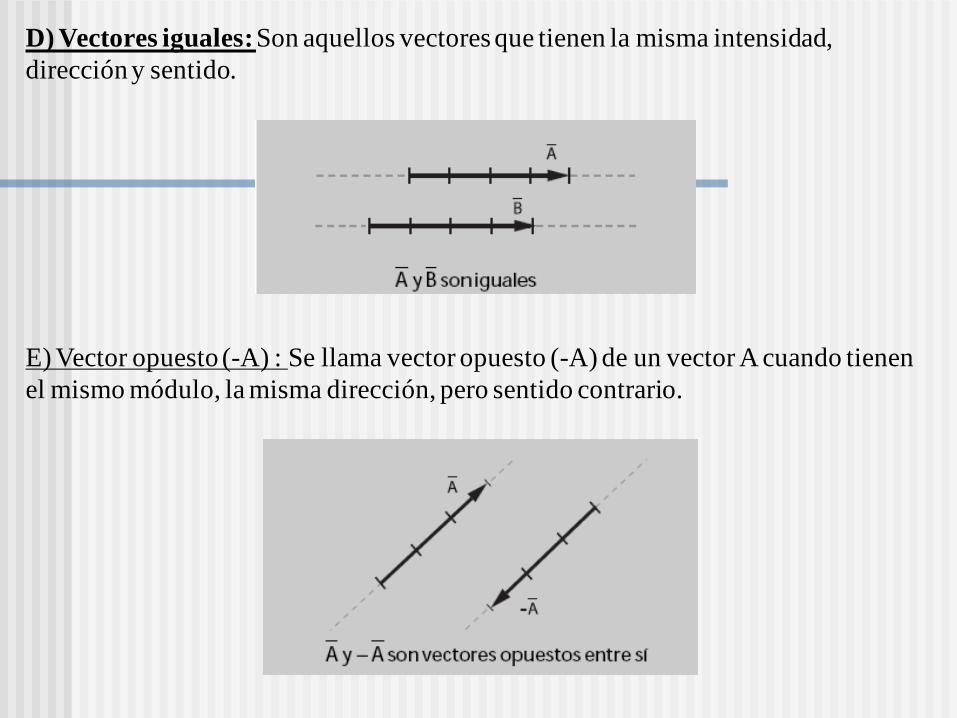
D) Vectores iguales: Son aquellos vectores que tienen la misma intensidad,
dirección y sentido.
E) Vector opuesto (-A) : Se llama vector opuesto (-A) de un vector A cuando tienen
el mismo módulo, la misma dirección, pero sentido contrario.
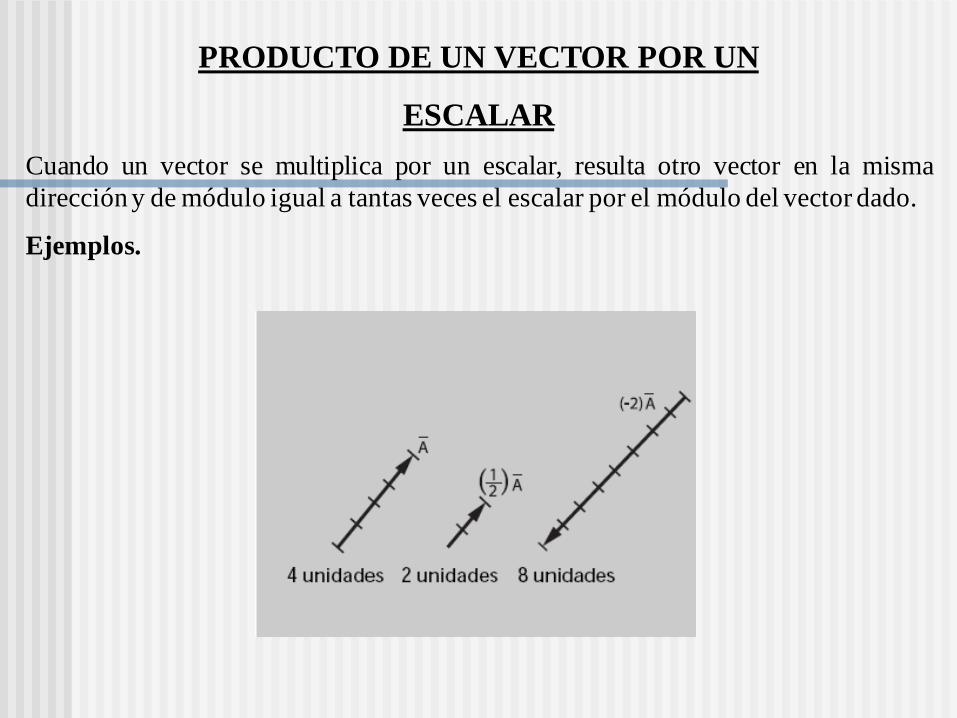
PRODUCTO DE UN VECTOR POR UN
ESCALAR
Cuando un vector se multiplica por un escalar, resulta otro vector en la misma
dirección y de módulo igual a tantas veces el escalar por el módulo del vector dado.
Ejemplos.
OPERACIONES VECTORIALES
ADICIÓN DE VECTORES
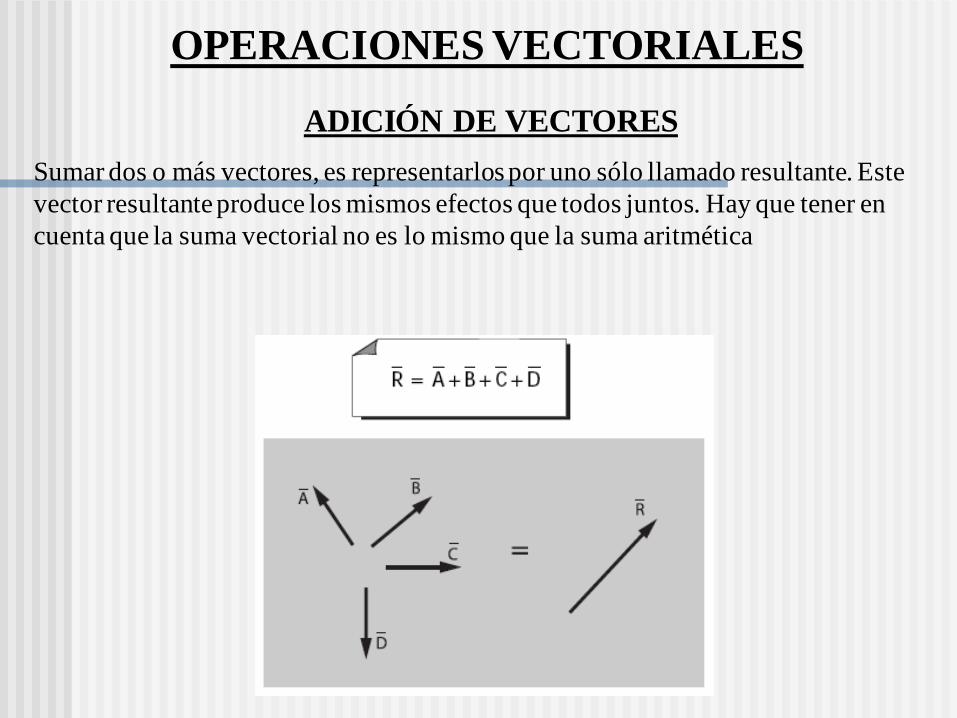
Sumar dos o más vectores, es representarlos por uno sólo llamado resultante. Este
vector resultante produce los mismos efectos que todos juntos. Hay que tener en
cuenta que la suma vectorial no es lo mismo que la suma aritmética
ADICIÓN DE VECTORES - MÉTODO GRÁFICO
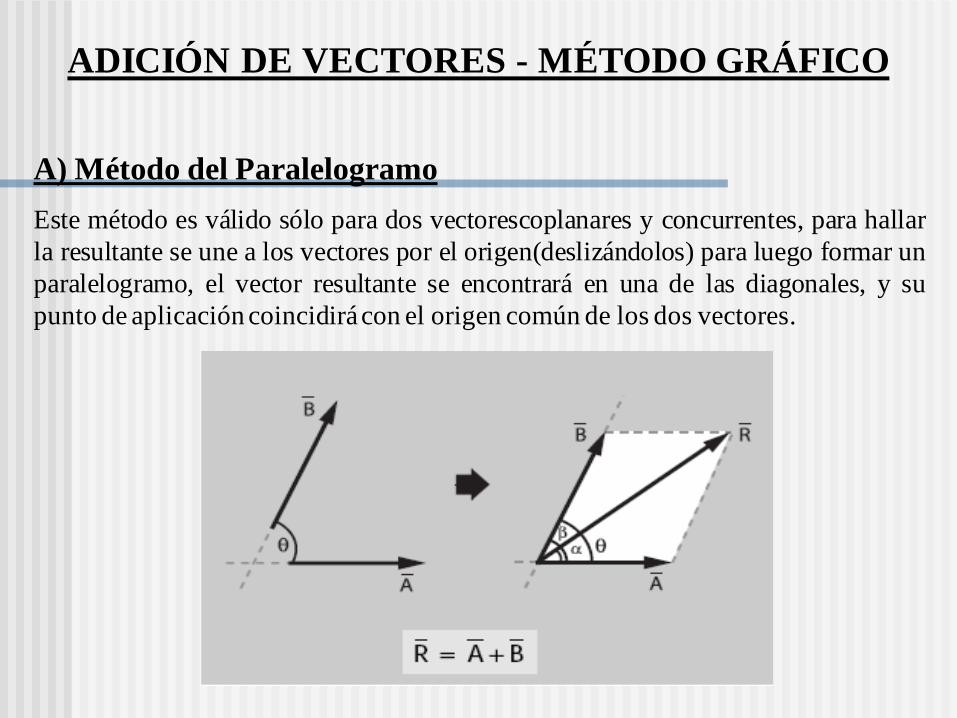
A) Método del Paralelogramo
Este método es válido sólo para dos vectorescoplanares y concurrentes, para hallar
la resultante se une a los vectores por el origen(deslizándolos) para luego formar un
paralelogramo, el vector resultante se encontrará en una de las diagonales, y su
punto de aplicación coincidirácon el origen común de los dos vectores.
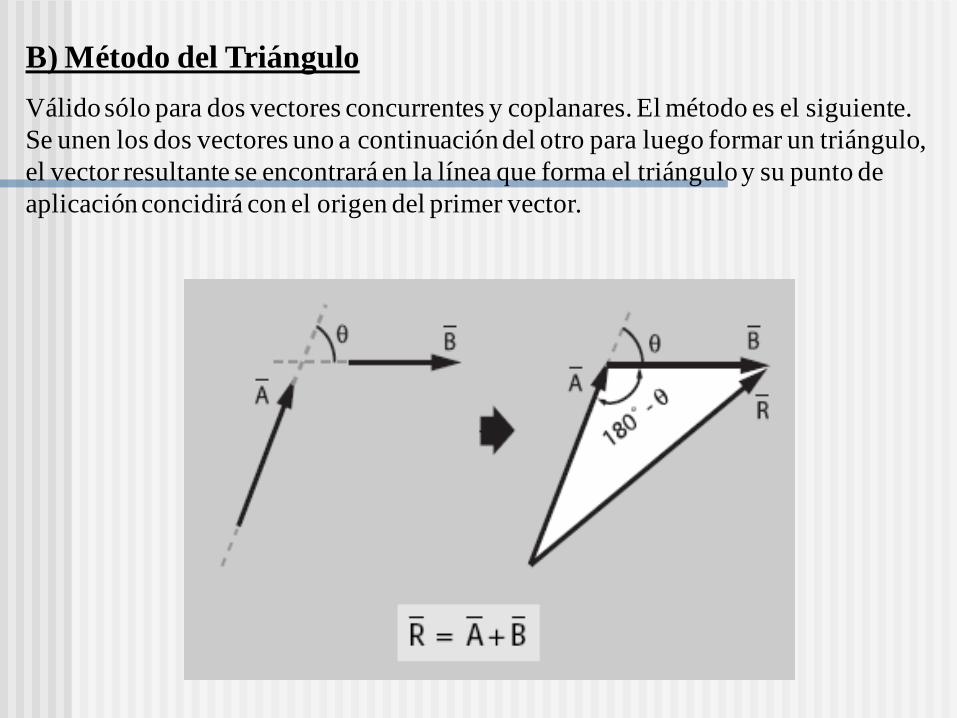
B) Método del Triángulo
Válido sólo para dos vectores concurrentes y coplanares. El método es el siguiente.
Se unen los dos vectores uno a continuación del otro para luego formar un triángulo,
el vector resultante se encontrará en la línea que forma el triángulo y su punto de
aplicación concidirá con el origen del primer vector.
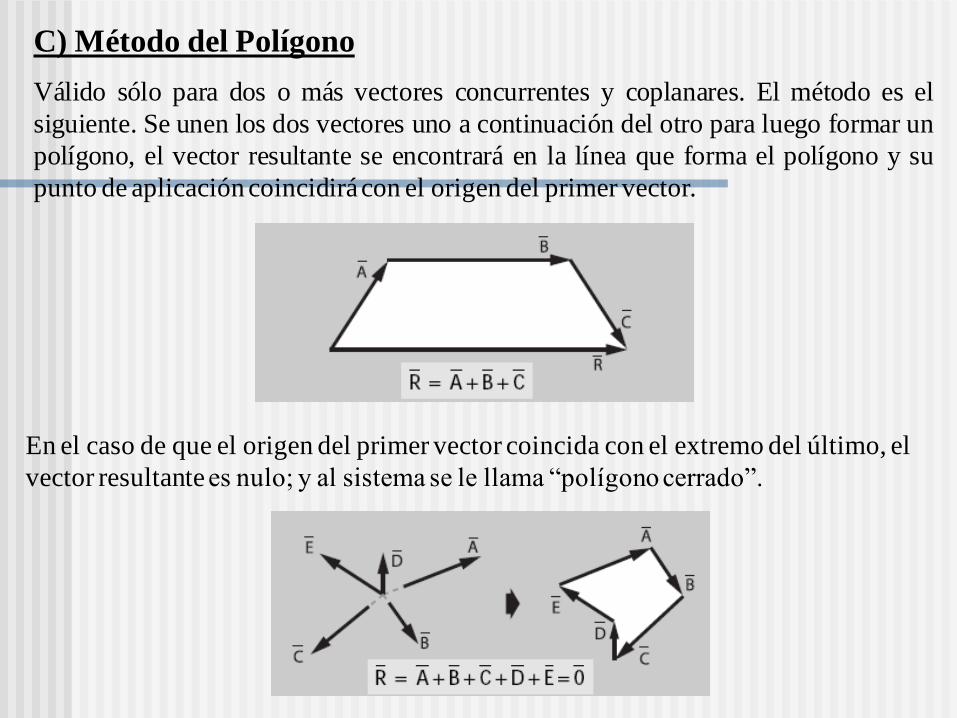
C) Método del Polígono
Válido sólo para dos o más vectores concurrentes y coplanares. El método es el
siguiente. Se unen los dos vectores uno a continuación del otro para luego formar un
polígono, el vector resultante se encontrará en la línea que forma el polígono y su
punto de aplicación coincidirácon el origen del primer vector.
En el caso de que el origen del primer vector coincida con el extremo del último, el
vector resultantees nulo; y al sistema se le llama “polígono cerrado”.
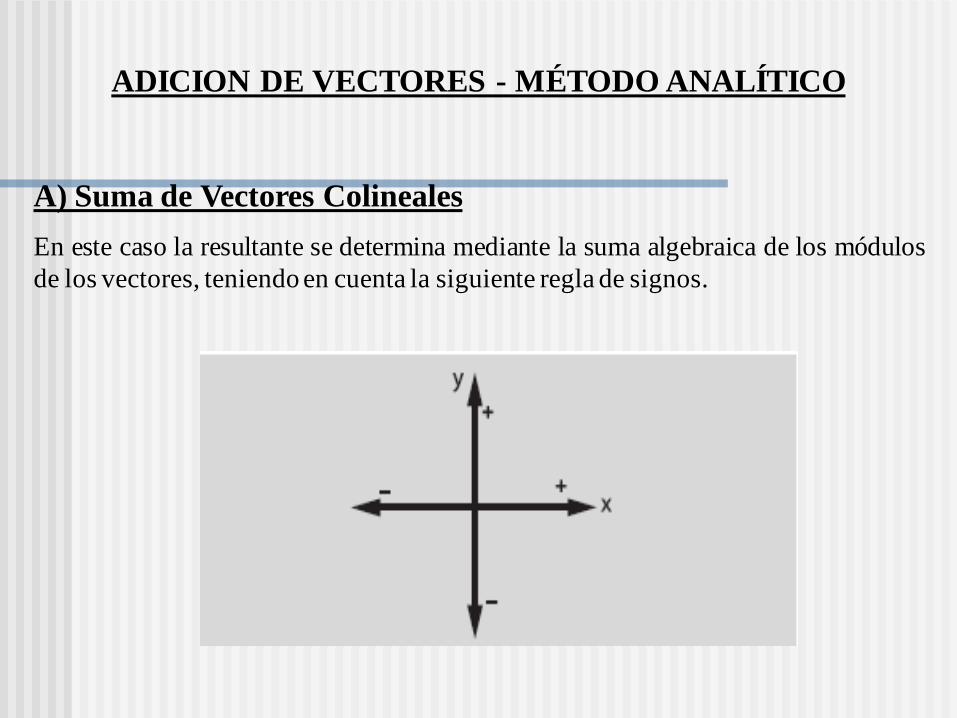
ADICION DE VECTORES - MÉTODO ANALÍTICO
A) Suma de Vectores Colineales
En este caso la resultante se determina mediante la suma algebraica de los módulos
de los vectores, teniendo en cuenta la siguiente regla de signos.
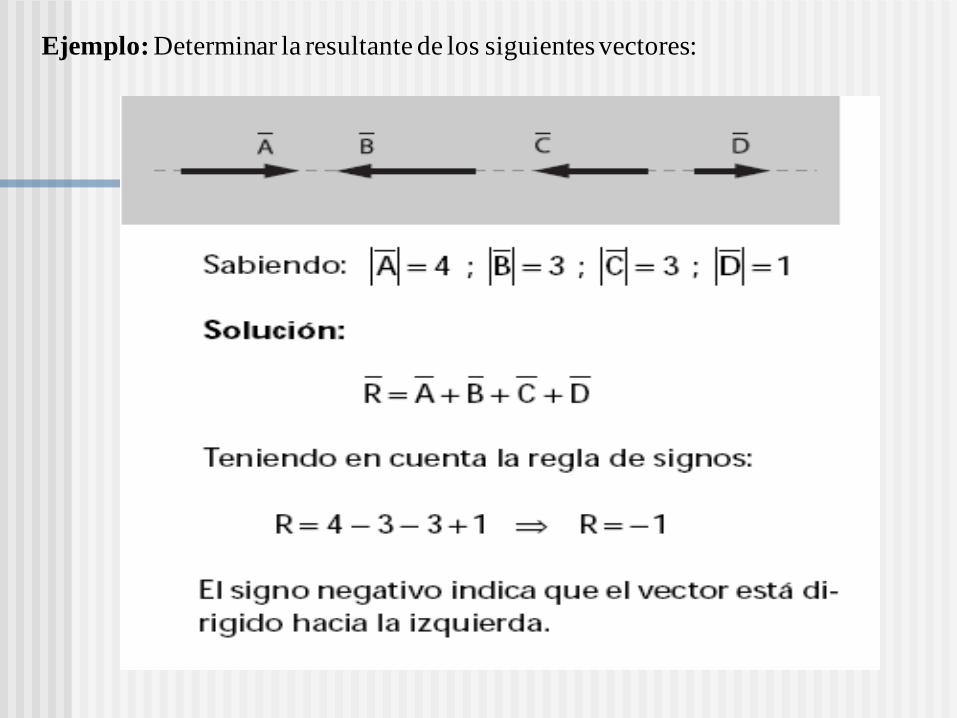
Ejemplo: Determinar la resultante de los siguientes vectores:
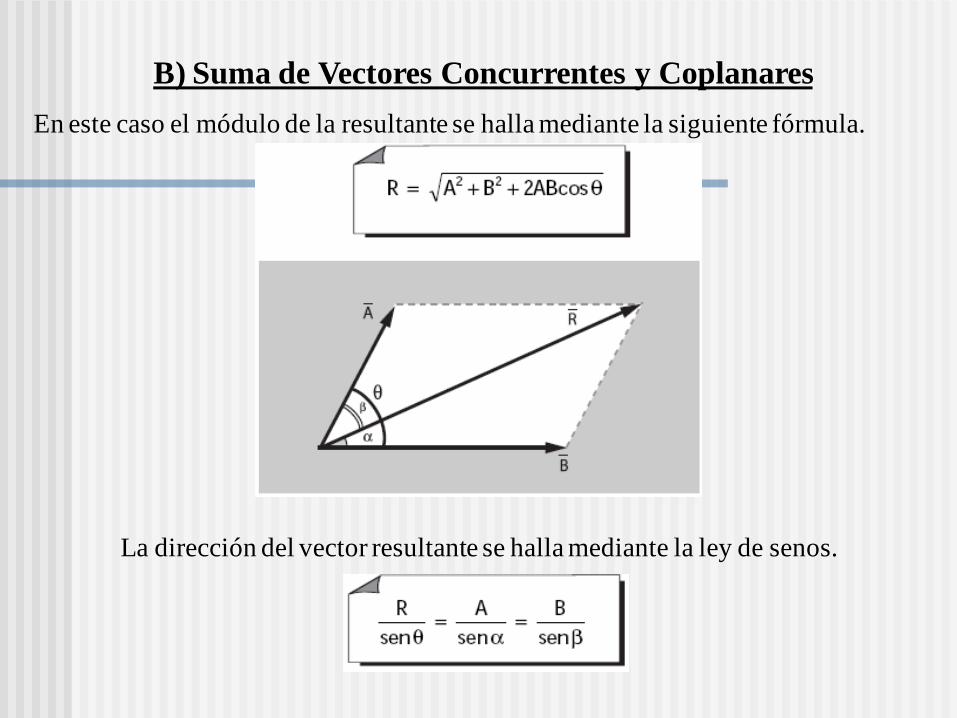
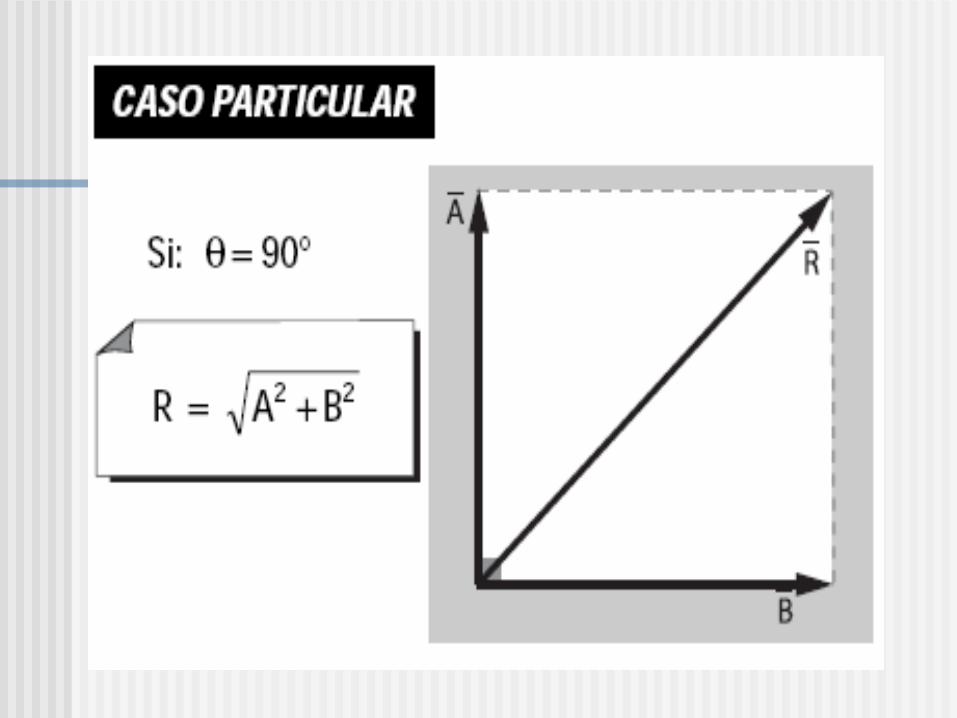
B) Suma de Vectores Concurrentes y Coplanares
En este caso el módulo de la resultante se halla mediante la siguiente fórmula.
La dirección del vector resultante se halla mediante la ley de senos.
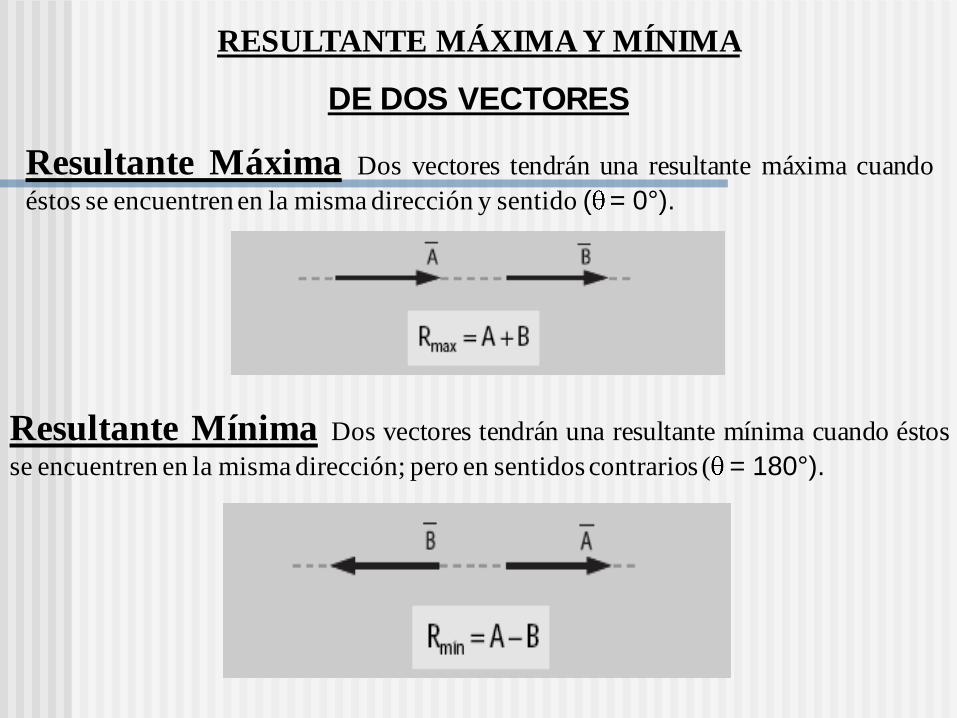
RESULTANTE MÁXIMA Y MÍNIMA
DE DOS VECTORES
Resultante Máxima Dos vectores tendrán una resultante máxima cuando
éstos se encuentren en la misma dirección y sentido ( = 0°).
Resultante Mínima Dos vectores tendrán una resultante mínima cuando éstos
se encuentren en la misma dirección; pero en sentidos contrarios ( = 180°).
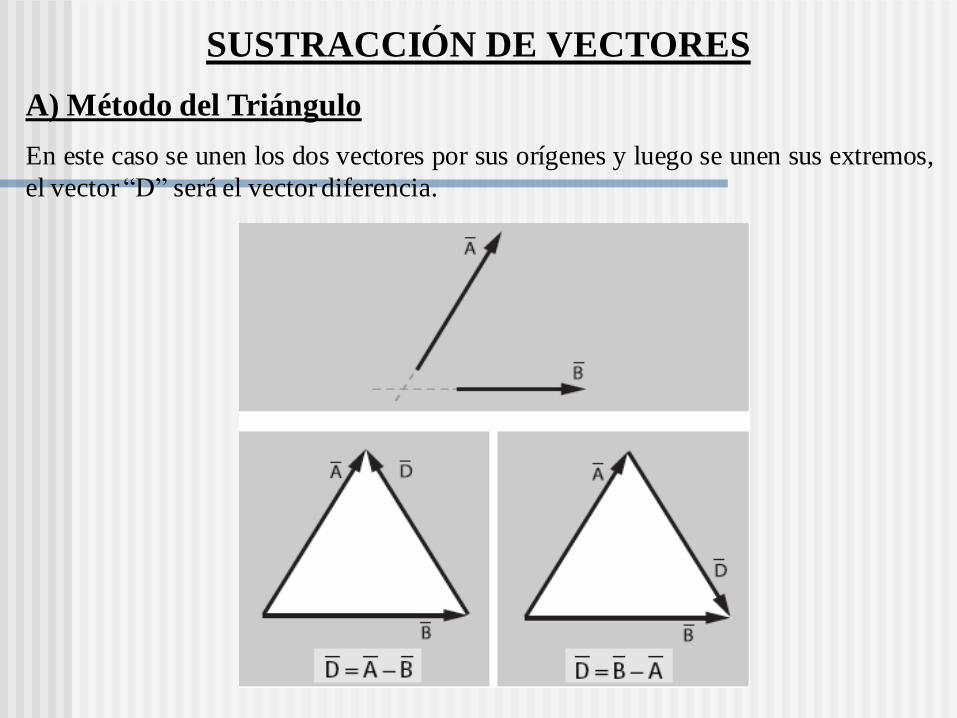
SUSTRACCIÓN DE VECTORES
A) Método del Triángulo
En este caso se unen los dos vectores por sus orígenes y luego se unen sus extremos,
el vector “D” será el vector diferencia.
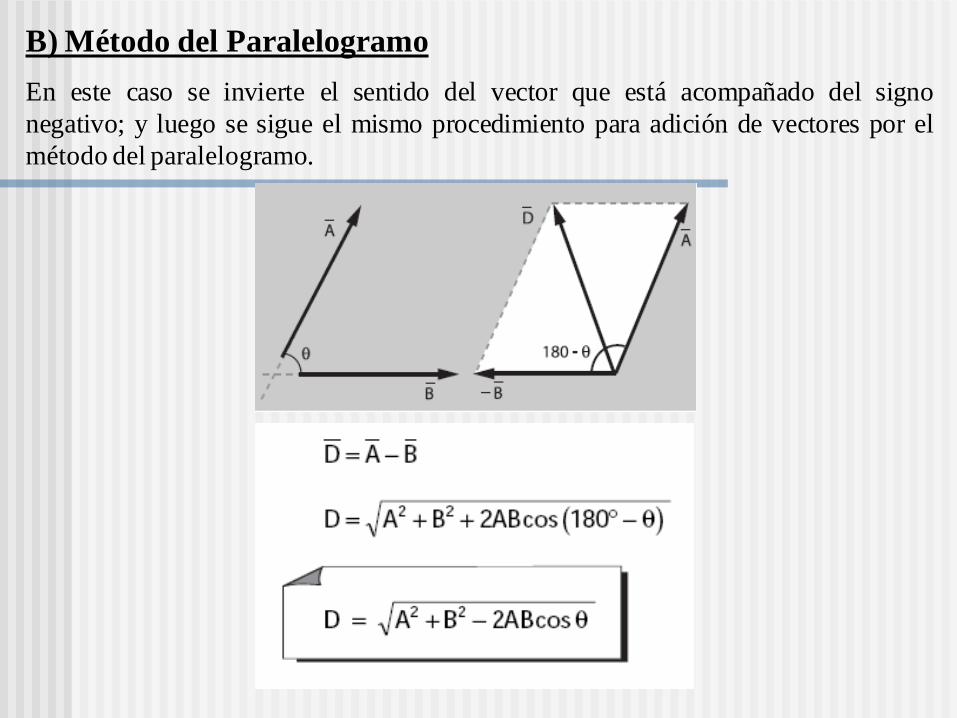
B) Método del Paralelogramo
En este caso se invierte el sentido del vector que está acompañado del signo
negativo; y luego se sigue el mismo procedimiento para adición de vectores por el
método del paralelogramo.
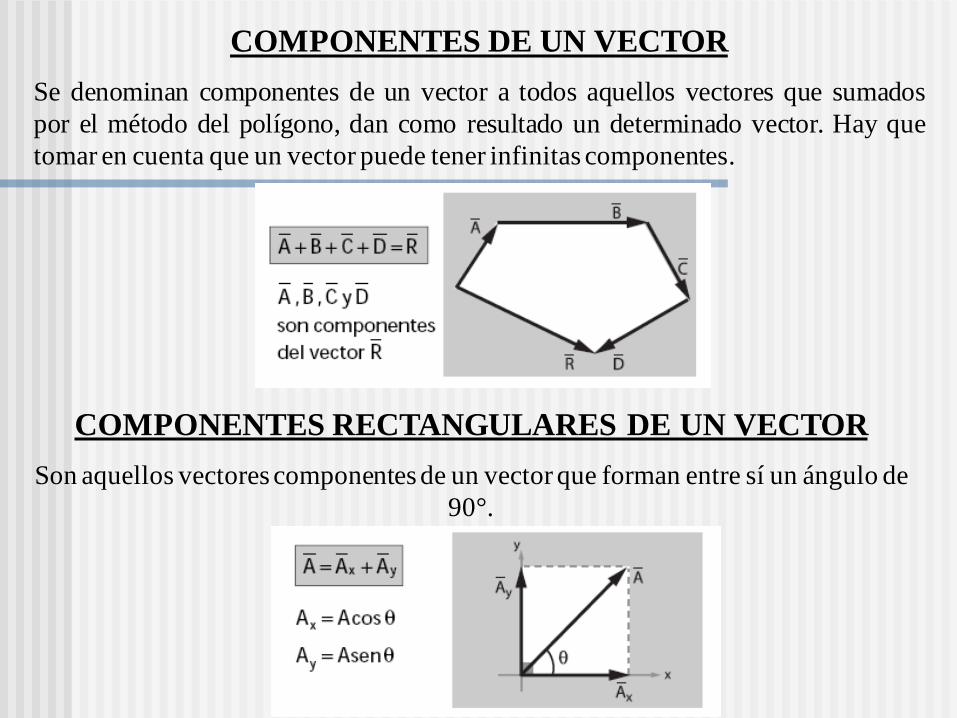
COMPONENTES DE UN VECTOR
Se denominan componentes de un vector a todos aquellos vectores que sumados
por el método del polígono, dan como resultado un determinado vector. Hay que
tomar en cuenta que un vector puede tener infinitas componentes.
COMPONENTES RECTANGULARES DE UN VECTOR
Son aquellos vectores componentes de un vector que forman entre sí un ángulo de
90°.
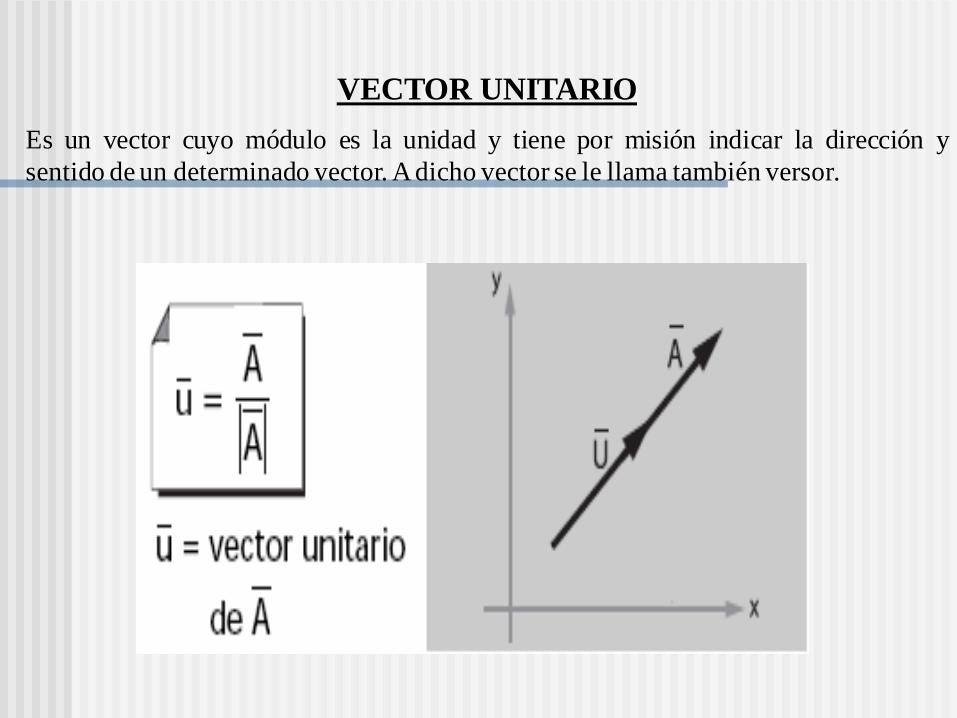
VECTOR UNITARIO
Es un vector cuyo módulo es la unidad y tiene por misión indicar la dirección y
sentido de un determinado vector. A dicho vector se le llama también versor.
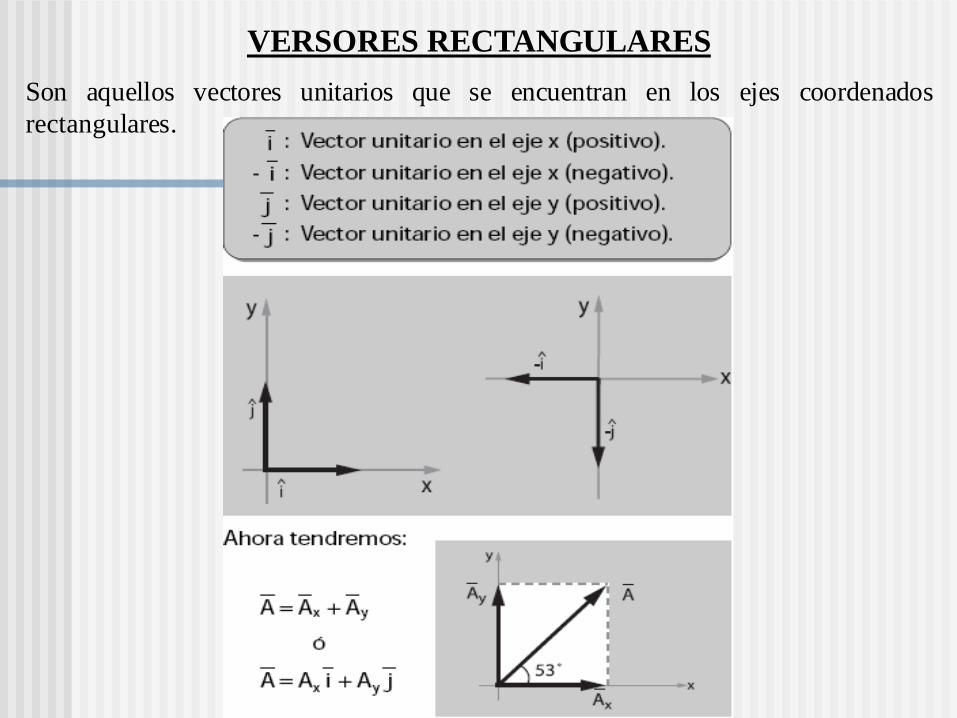
VERSORES RECTANGULARES
Son aquellos vectores unitarios que se encuentran en los ejes coordenados
rectangulares.
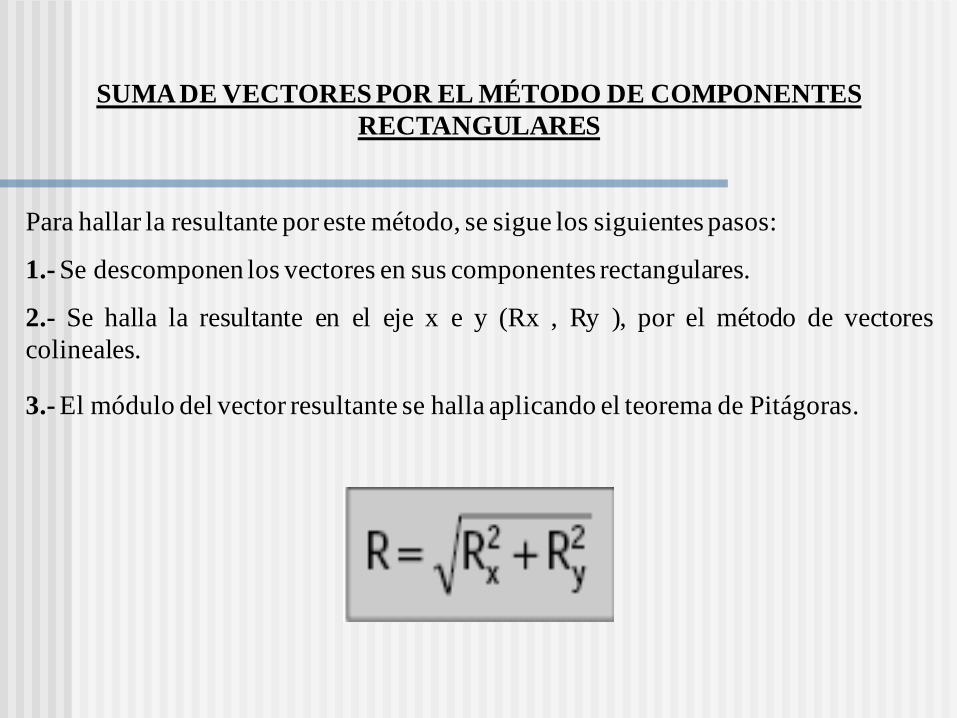
SUMA DE VECTORES POR EL MÉTODO DE COMPONENTES
RECTANGULARES
Para hallar la resultante por este método, se sigue los siguientes pasos:
1.- Se descomponen los vectores en sus componentes rectangulares.
2.- Se halla la resultante en el eje x e y (Rx , Ry ), por el método de vectores
colineales.
3.- El módulo del vector resultante se halla aplicando el teorema de Pitágoras.
PROBLEMAS PROPUESTOS
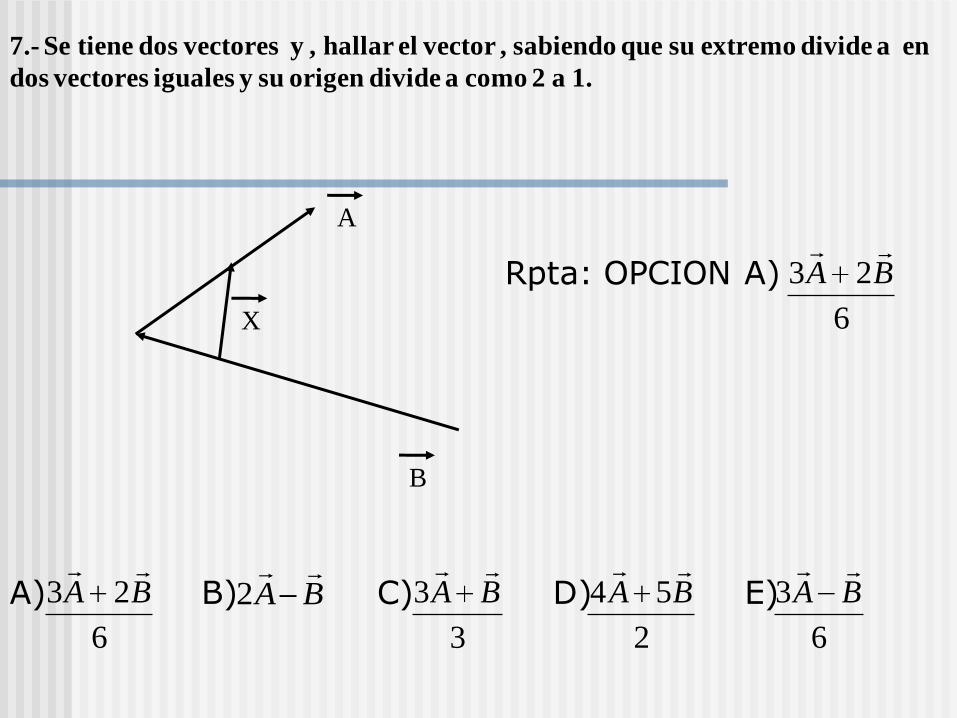
7.- Se tiene dos vectores y , hallar el vector , sabiendo que su extremo divide a en
dos vectores iguales y su origen divide a como 2 a 1.
A
B
X
BA
2
6
23 BA
3
3 BA
2
54 BA
6
3 BA
A) B) C) D) E)
Rpta: OPCION A)
6
23 BA
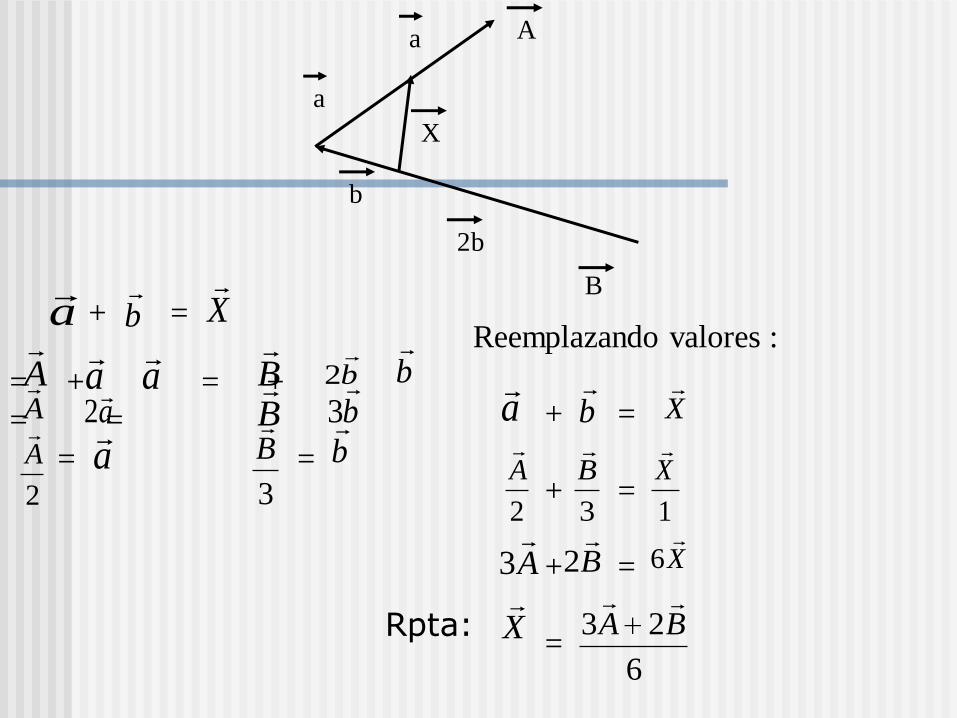
+ = b
a
X
A
B
X
a
a
b
2b
= + = +
= =
= =
A
a
a
B b
2 b
A
a
2B
b
3
2
A
a
3
B
b
Reemplazando valores :
+ =
+ =
+ =
=
a
b
X
2
A
3
B
1
X
A
3 B
2 X
6
X
6
23 BA
Rpta:
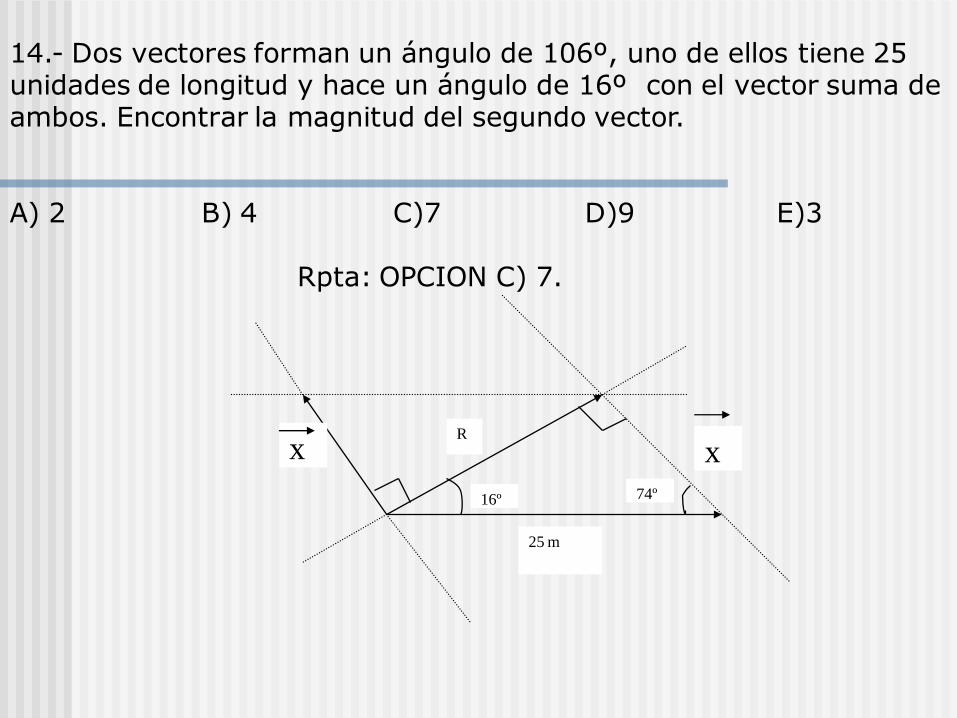
14.- Dos vectores forman un ángulo de 106º, uno de ellos tiene 25 unidades de longitud y hace un ángulo de 16º con el vector suma de ambos. Encontrar la magnitud del segundo vector.
A) 2 B) 4 C)7 D)9 E)3
Rpta: OPCION C) 7.
x
74º
25 m
xR
16º
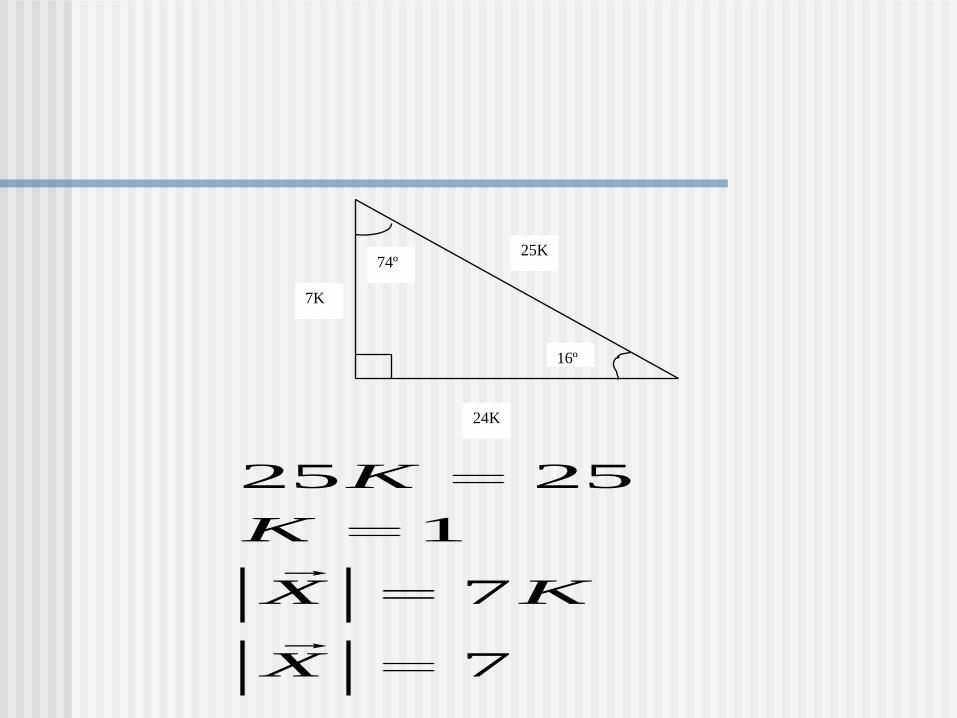
7K
25K
24K
74º
16º
7
7
1
2525
X
KX
K
K
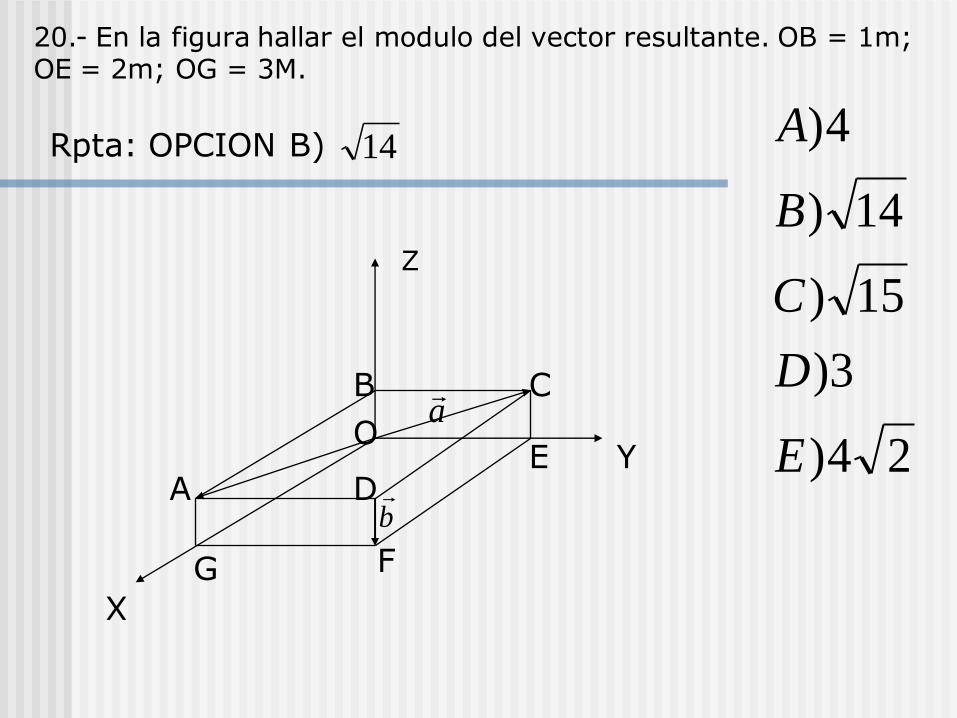
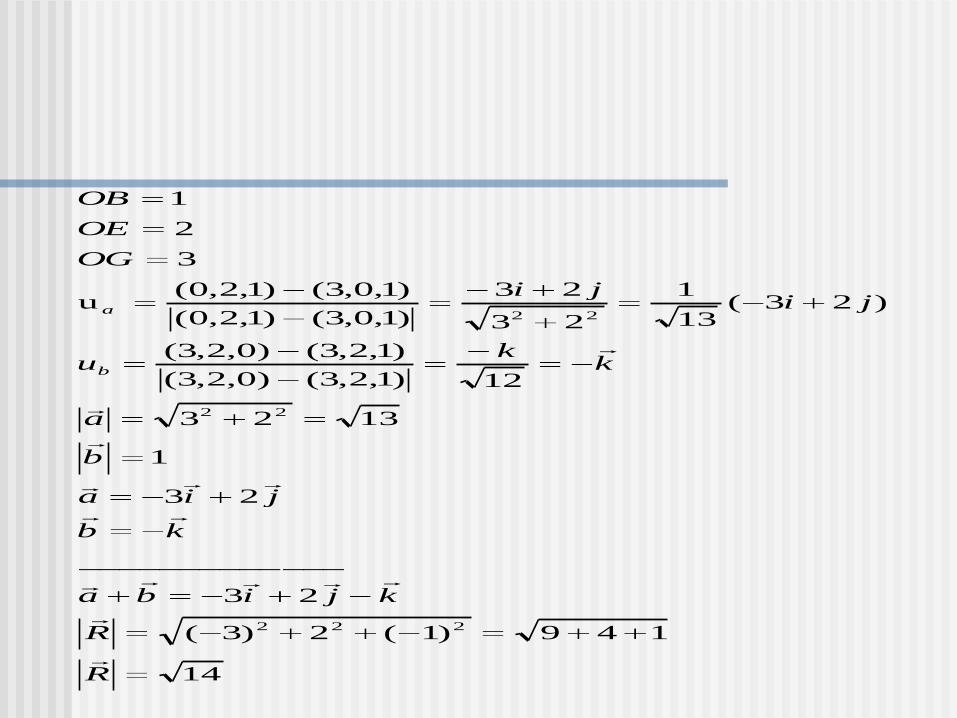
20.- En la figura hallar el modulo del vector resultante. OB = 1m; OE = 2m; OG = 3M.
24)
3)
15)
14)
4)
E
D
C
B
ARpta: OPCION B) 14
Z
Y
X
A
B C
DE
FG
Oa
b
14
149)1(2)3(
23
_____________
23
1
1323
12)1,2,3()0,2,3(
)1,2,3()0,2,3(
)23(13
1
23
23
)1,0,3()1,2,0(
)1,0,3()1,2,0(u
3
2
1
222
22
22
R
R
kjiba
kb
jia
b
a
kk
u
jiji
OG
OE
OB
b
a
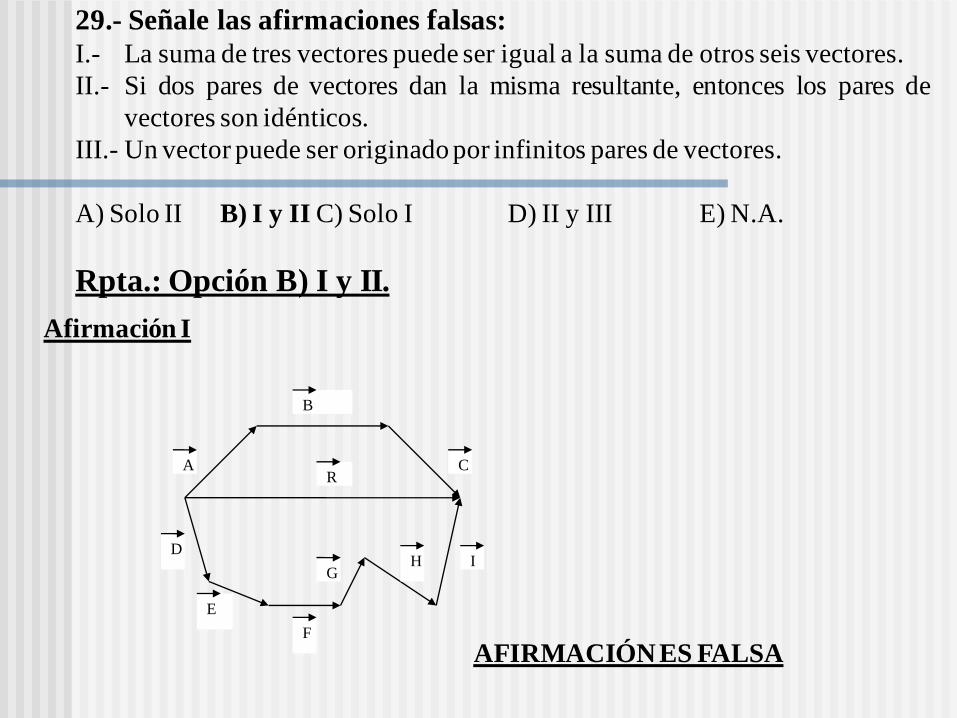
29.- Señale las afirmaciones falsas:
I.- La suma de tres vectores puede ser igual a la suma de otros seis vectores.
II.- Si dos pares de vectores dan la misma resultante, entonces los pares de
vectores son idénticos.
III.- Un vector puede ser originado por infinitos pares de vectores.
A) Solo II B) I y II C) Solo I D) II y III E) N.A.
Rpta.: Opción B) I y II.
Afirmación I
AFIRMACIÓN ES FALSA
A
B
C
D
E
F
GH I
R
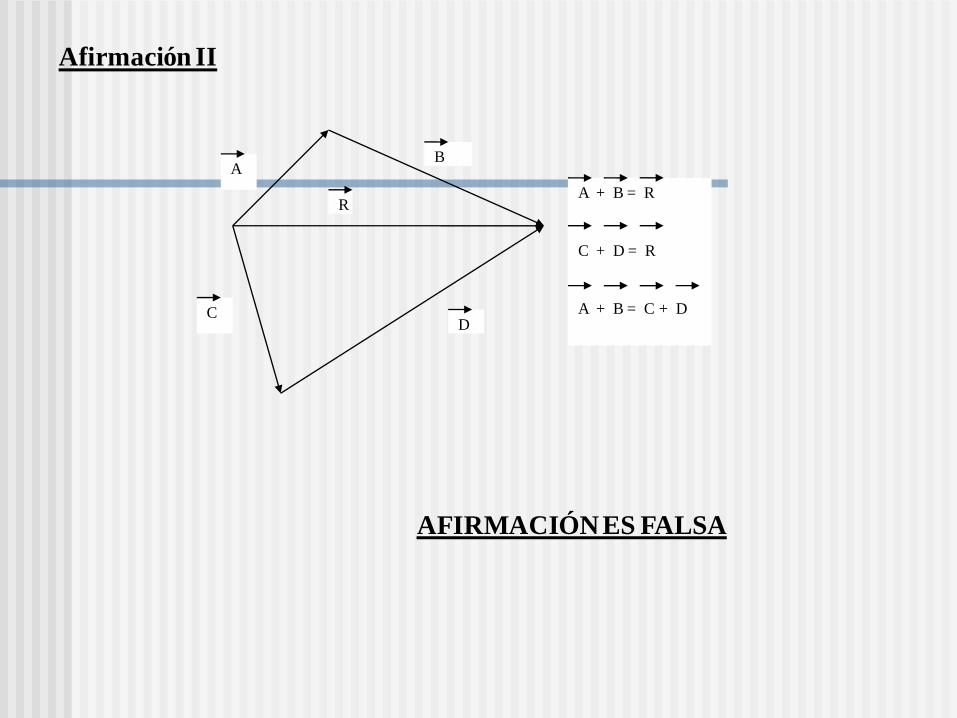
Afirmación II
AFIRMACIÓN ES FALSA
AB
CD
RA + B = R
C + D = R
A + B = C + D
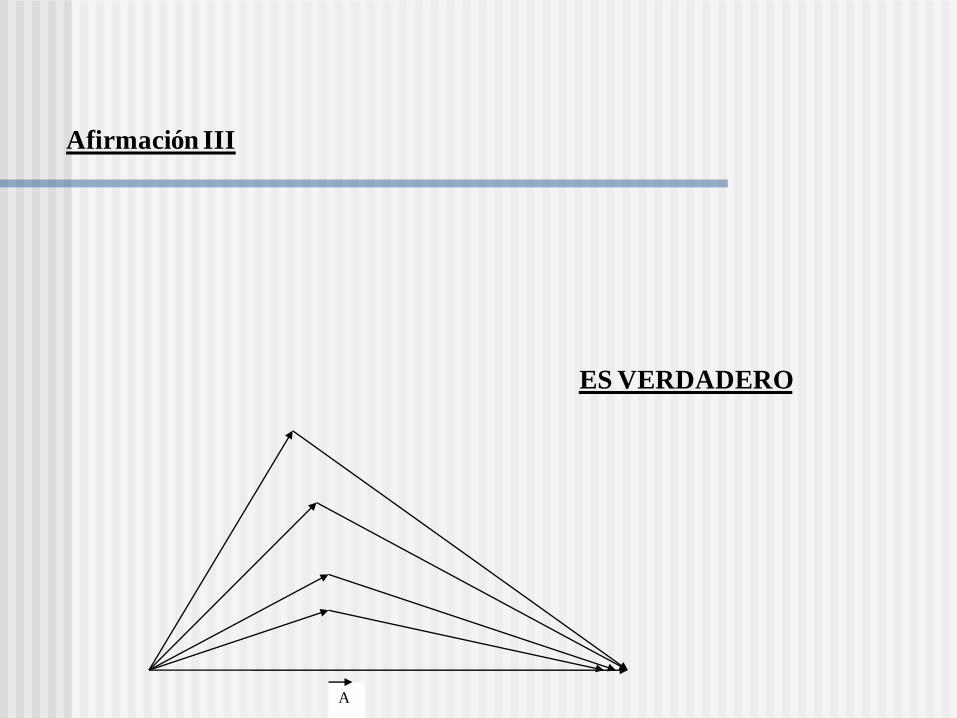
Afirmación III
ES VERDADERO
A

















