

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
CALCULO VECTORIAL
UNIDAD I
Algebra de Vectores
MC. César Silva Beltrán.

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
1.1 Definición de un vector en R2, R3 (Interpretación geométrica), y su
generalización en Rn.
Los vectores tienen dos naturalezas diferentes, una geométrica y la otra algebraica. Para
estudiar las aplicaciones de los vectores se necesita un entendimiento de ambos aspectos.
Por sencillez, se comenzará con vectores en el plano. La generalización a tres dimensiones
se logra fácilmente tomando en cuenta una tercera componente. También se discutirán
algunos temas básicos de la geometría analítica en tres dimensiones incluyendo rectas,
planos, cilindros y superficies cuadráticas
Algunas cantidades en las matemáticas y otras ciencias, tales como el área, el volumen, la
longitud de arco, la temperatura y el tiempo, solo tienen magnitud y se pueden caracterizar
completamente con un solo número real (con una unidad de medida apropiada como cm2,
cm3, cm, ºC, min o seg.). Una cantidad de este tipo es una cantidad escalar y el número
real correspondiente se llama escalar. Conceptos como el de velocidad o fuerza poseen
tanto magnitud como dirección y a menudo se representan por flechas o segmentos
dirigidos, es decir, segmentos en los que se señala un sentido y representan una dirección.
A un segmento dirigido también se le llama vector.
Si un vector va de un punto P (el punto inicial) a un punto Q (el punto final), la dirección
se indica colocando una pequeña flecha sobre el segmento PQ; el vector se denota así por
PQ (véase la figura 1.1). La magnitud de
PQ es la longitud de PQ y se denota por
PQ .
Como en la figura 1.1, para denotar vectores cuyos extremos no se especifican, se usan
letras de tipo negro (o negrillas) tales como u o v, en escritos mecanográficos o manuscritos
se puede usar la notación
u o
v .

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Vectores que tienen la misma magnitud y dirección son equivalentes. Cuando se quiere
que un vector quede determinado solo por su magnitud y su dirección y no por su posición,
se considera que unos vectores que son equivalentes, como los de la figura 1.1, son iguales
y se escribe
PQu ,
PQv y u = v
Entonces, los vectores pueden trasladarse de una posición a otra mientras no se altere su
magnitud o su dirección.
Hay muchos conceptos físicos que se pueden representar con vectores. Por ejemplo,
supóngase que un avión desciende con una velocidad constante de 160 km/hr y que la
trayectoria del vuelo forma un ángulo de 20º con la horizontal. En la figura 1.2 se
representan estos dos hechos por un vector v de magnitud 160. El vector v es un vector
velocidad.
Figura 1.1
Figura 1.2 Figura 1.3
ITS Cálculo Vectorial
M.C. César Silva Beltrán.
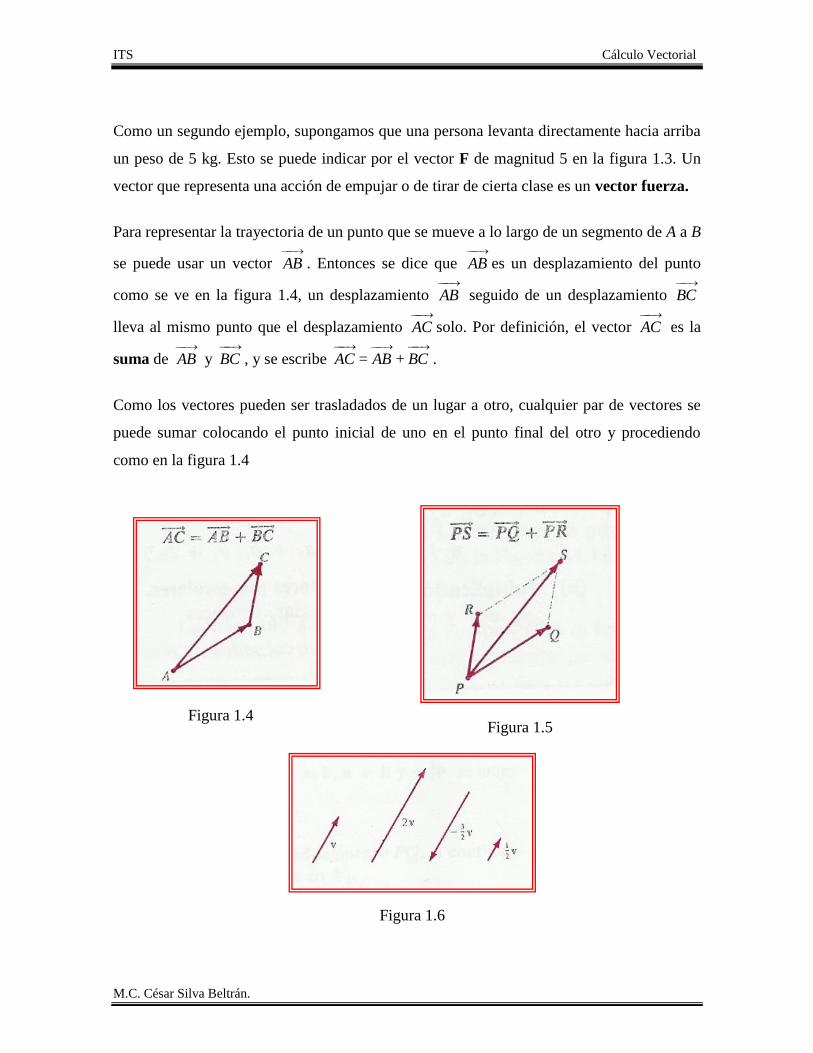
Como un segundo ejemplo, supongamos que una persona levanta directamente hacia arriba
un peso de 5 kg. Esto se puede indicar por el vector F de magnitud 5 en la figura 1.3. Un
vector que representa una acción de empujar o de tirar de cierta clase es un vector fuerza.
Para representar la trayectoria de un punto que se mueve a lo largo de un segmento de A a B
se puede usar un vector
AB . Entonces se dice que
AB es un desplazamiento del punto
como se ve en la figura 1.4, un desplazamiento
AB seguido de un desplazamiento
BC
lleva al mismo punto que el desplazamiento
AC solo. Por definición, el vector
AC es la
suma de
AB y
BC , y se escribe
AC =
AB +
BC .
Como los vectores pueden ser trasladados de un lugar a otro, cualquier par de vectores se
puede sumar colocando el punto inicial de uno en el punto final del otro y procediendo
como en la figura 1.4
Figura 1.4
Figura 1.6
Figura 1.5

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Otra manera de encontrar la suma es considerar vectores iguales a
AB y
BC y que tienen
el mismo punto inicial, como se ilustra por
PQ y
PR en la figura 1.5. Si se construye el
paralelogramo RPQS, entonces, como
PR =
QS , resulta que
PS =
PQ +
PR . Si
PQ y
PR son dos fuerzas que actúan en P, entonces
PS es la fuerza resultante, es decir, una
fuerza que sola produce el mismo efecto que las otras dos actuando simultáneamente.
Si c es un número real y v es un vector, entonces cv se define como el vector cuya magnitud
es c veces la magnitud v de v y cuya dirección es la misma que la de v si c > 0, o bien la
opuesta a la de v si c < 0. En la figura 1.6 se ilustra todo esto. El vector cv se llama
múltiplo escalar de v.
Supongamos ahora que todos los vectores están en un plano coordenado. Si PQ es un
vector, entonces, como se indica en la figura 1.7, hay muchos vectores equivalentes a
PQ :
pero hay uno y solo un vector equivalente a =
OA con el origen como punto inicial. El
vector
OA se llama vector de posición de
PQ . Así, cada vector determina un único par
ordenado de números reales, las coordenadas (a1, a2) el punto final de su vector de
posición.
Sean
OA y
OB dos vectores de posición con puntos finales A(a1, a2) y B(b1, b2),
respectivamente, y sea
OC con punto final C(a1 + b1, a2 + b2), como se ilustra en la figura
Figura 1.7 Figura 1.8

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
1.8. Usando las pendientes puede demostrarse que O, A, C y B son los vértices de un
paralelogramo; es decir,
OA +
OB =
OC
Entonces, el par ordenado determinado por
OA +
OB es (a1 + b1, a2 + b2). También se
puede demostrar que si c es un escalar, entonces el par ordenado determinado por
cOA es
(ca1 + ca2) como se ilustra en la figura 1.9 para c > 0.
Las observaciones anteriores permiten invertir el desarrollo y comenzar definiendo los
vectores como pares ordenados y obteniendo luego los segmentos rectos como una
interpretación alternativa. Para evitar confusión con la notación para intervalos abiertos o
puntos, se usarán símbolos como 21,aa o bien 21,bb para los vectores y se denotaran
por a o b, respectivamente. Como antes, los números reales son escalares.
Figura 1.9

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
DEFINICION 1.1
Los números a1 y a2 en 21,aa son las componentes del vector. Entonces, para sumar dos
vectores, se suman las componentes correspondientes. Para multiplicar un vector por un
escalar, se multiplica cada componente del vector por el escalar.
El vector cero 0 y el negativo –a de un vector a = 21,aa se define como sigue.
DEFINICION 1.2
Un vector diferente de cero a = 21,aa en R2 se puede representar en un plano coordenado
por un segmento dirigido
PQ con cualquier punto inicial P (x,y) y con punto final Q (x +
a1, y + a2) . A veces se dice que
PQ corresponde a a o que a corresponde a
PQ . En la
figura 1.10, el símbolo a se colocó junto a varios segmentos dirigidos correspondientes a
21,aa . Si A es el punto con coordenadas 21,aa , el vector de posición
OA de
PQ se
llama también vector de posición de 21,aa o vector de posición del punto A.
El espacio vectorial R2 de dimensión 2 (o bidimensional) es el conjunto de todos los
pares ordenados yx, de números reales, llamados vectores, sujetos a los siguientes
axiomas.
(i) Adición de vectores. Si se tiene a = 21,aa y b = 21,bb , entonces
a + b = 2211 , baba
(ii) Multiplicación de vectores por escalares. Si a = 21,aa y c es un escalar,
entonces
ca = 21,caca .
0 = ;0,0 -a = - 21,aa = 21, aa .

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Rigurosamente hablando, el segmento
PQ en la figura 1.10 representa al vector a =
21,aa ; sin embargo, por conveniencia, a veces se designa a
PQ como el vector a. Debe
quedar claro por el contexto si el término vector se refiere a un par ordenado o a un
segmento dirigido. El vector cero 0 = 21 0,0 queda representado por cualquier punto del
plano.
EJEMPLO 1
Sean a = 3,1 y b = 2,4 .
a) a + b, 2
3 b, y 2a + 3b.
b) Trazar los vectores de posición de a, b, a + b, y 2
3 b
Solución
(a) Aplicando la definición 1.1
a + b = 3,1 + 2,4 = 5,323,41
2
3 b =
2
3 2,4 = 3,6
2a + 3b = 2 3,1 + 3 2,4 = 6,2 + 6,12 = 12,10
Figura 1.10

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
(b) Los vectores de posición de a, b, a + b, y 2
3 b se muestran en la figura 1.11
La magnitud
PQ de un vector
PQ es la longitud del segmento PQ. A continuación se
define el análogo de este concepto para vectores en R2.
DEFINICION 1.3
Si
OA es el vector de posición de 21,aa , entonces a es la longitud de
OA (véase la
figura 1.12). Nótese que a 0 y a = 0 si y solo si a = 0.
La magnitud de a de un vector a = 21,aa es a = 2
2
2
1 aa
Figura 1.11

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
EJEMPLO 2
Calcular la magnitud de 2,3
Solución
De la definición 1.3,
a = 13492,3
TEOREA 1.4
EJEMPLO 3 Dados los puntos P (-2,3) y Q (4,5), encontrar vectores a y b en R2 que
correspondan a
PQ y
QP respectivamente. Trazar
PQ ,
QP , y los vectores de
posición a y b.
Solución
De acuerdo con el teorema 1.1, los vectores a y b son
a = 2,635),2(4
b = 2653,42
Si P1(x1, y1) y P2(x2,y2) son dos puntos, entonces el vector a en R2 que
corresponde a
21PP es
a = 1212 , yyxx
Figura 1.11

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
En la figura 1.12 se muestran
PQ y
QP , junto con los vectores de posición
OA y
OB
de a y b, respectivamente. Nótese que b = - a
En el siguiente teorema se enuncian cuatro propiedades importantes para tres vectores
cualesquiera a, b y c en R2
TEOREA 1.5
La sustracción de vectores, que se denota por (-) , se define como sigue.
DEFINICION 1.6
Usando las definiciones (1.6), (1.2) y (1.1), se ve que
a – b = a + (-b) = 2121 ,, bbaa = 2211 , baba
Entonces, para encontrar a – b, basta restar las componentes de b de las componentes
correspondientes de a.
(i) a + b = b + a
(ii) a + (b + c) = (a + b) + c
(iii) a + (-a) = 0
Sean a = 21,aa y b = 21,bb . La diferencia a – b es:
a – b = a + (-b)
Figura 1.12

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
EJEMPLO 4
Sean 4,5 a y 2,3b , encontrar a – b y 2a - 3b.
Solución
a – b = 4,5 – 2,3 = 24),3(5 = 6,8
2a - 3b = 4,52 – 2,33 = 8,10 – 6,9 = 14,19
En el siguiente teorema se enuncian algunas propiedades de la multiplicación de
vectores en R2 por escalares. En el, a y b son dos vectores arbitrarios y c y d dos
escalares cualesquiera
TEOREA 1.7
No es difícil recordar las propiedades enunciadas en el teorema 1.7 por que se parece a
algunas propiedades conocidas de los números reales.
Los vectores i y j se usaran más adelante.
DEFINICION 1.8
Los dos vectores i y j tienen magnitud 1 ya que, según la definición 1.3
101 22 i y 110 22 j
Se puede usar i y j para denotar de otra forma los vectores de R2, como se muestra en el
siguiente teorema.
(i) cbcabac )(
(ii) dacaadc )(
(iii) )()()( caddacacd
(iv) aia
(v)
i = 0,1 , j = 1,0

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
TEOREMA 1.9
EJEMPLO 5
Sean jia 5 y jib 74 . Expresar 3a – 2b como una combinación lineal de i y j.
Solución
jiba
jijijijiba
17723
)148()315()74(2)5(323
Un vector unitario es un vector de magnitud 1. Los vectores i y j son vectores unitarios.
Si a = 21,aa es un vector en R2, entonces a = jaia 21

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
VECTORES R3
Para estudiar los vectores en el espacio se usan ternas ordenadas y un sistema de
coordenadas en tres dimensiones. Una terna ordenada (a, b, c) es un conjunto cba ,, de
tres números de los cuales a se considera el primero, b el segundo y c el tercero la
colección de todas las ternas ordenadas se denota por x x . Se dice que dos ternas
ordenadas 321 ,, aaa y 321 ,, bbb son iguales y se escribe 321 ,, aaa = 321 ,, bbb si y solo
si 11 ba , 22 ba , 33 ba .
Para establecer un sistema de coordenadas en tres dimensiones, se escoge un punto fijo O
(el origen) y tres rectas coordenadas perpendiculares entre si (los ejes x, y, z) con un origen
común O, como se ilustra en la figura 1.13. Para visualizar esta construcción, puede
considerarse que los ejes y y z se encuentran en el plano del papel y que el eje x apunta
hacia fuera de la hoja. Las tres rectas coordenadas determinan tres planos coordenados que
se indican en la figura 1.14; el plano xy, el plano yz y el plano xz.
Los tres ejes de la figura 1.14 determinan un sistema coordenado derecho si se
intercambian los ejes x y y, se obtiene un sistema coordenado izquierdo, el calificativo
derecho se debe a que si los dedos de la mano derecha se curvan en el sentido de un giro de
90º de los ejes en el plano xy (de manera que la parte positiva del eje x coincida con la parte
positiva del eje y), entonces el pulgar extendido apunta en la dirección positiva del eje z,
como se muestra en la figura 1.15. Por lo general se usan sistemas coordenados derechos.
Figura 1.13
Figura 1.14

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Si P es un punto en el espacio y su proyección (perpendicular) sobre el eje x tiene
coordenada a, entonces a se llama coordenada x (o abscisa) de P. Análogamente, las
coordenadas b y c de las proyecciones de P sobre los ejes y y z, respectivamente se
denominan coordenada y (u ordenada) y coordenada z (o elevación) de P. El símbolo P(a,
b, c) o bien (a, b, c), denota el punto P con coordenadas a, b y c, Si P no se encuentra en un
plano coordenado, entonces los tres planos que pasan por P y que son paralelos a los
planos coordenados forman, junto con estos últimos, un prisma rectangular como el que se
muestra en la figura 1.16.
El concepto de ubicar puntos es análogo al de dos dimensiones. En la figura 1.17 aparecen
localizados varios puntos. Para ubicar (3, 4, -2), se localiza primero (3, 4, 0) en el plano xy
y luego se mueve ese punto 2 unidades hacia abajo. Para situar (-2, 3, 4), primero se
localiza (-2, 3, 0) en el plano xy y luego se mueve el punto 4 unidades hacia arriba, etc.
Figura 1.15 Figura 1.16
Figura 1.17 Figura 1.18

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
La correspondencia biunívoca entre puntos en el espacio y ternas ordenadas de números
reales en un sistema de coordenadas rectangulares en tres dimensiones. Los tres planos
coordenados dividen el espacio en ocho partes iguales llamadas octantes. La parte que
consta de todos los puntos P(a, b, c) que tienen las tres coordenadas a, b y c positivas en el
primer octante. No suelen numerarse los otros octantes.
1.2 Operaciones con vectores y sus propiedades.
Se puede efectuar la deducción de una formula para la distancia d(P1, P2) entre dos puntos
P1 y P2 en el espacio. Si P1 y P2 se encuentran en una recta paralela al eje z, como se ilustra
en la figura 1.18 y proyecciones sobre el eje z son A1 (0, 0, z1) y A2 (0, 0, z2),
respectivamente, por lo cual d (P1, P2) = d(A1, A2) = 12 zz si la recta que pasa por P1 y P2
es paralela al eje x o al eje y, las fórmulas son análogas.
Si se desea calcular la distancia entre dos puntos P1 y P2 tales que la recta que los une no es
paralela a algún eje, se tiene una situación como la que se ilustra en la figura 1.19, el
triangulo P1AP2 es un rectángulo y entonces, de acuerdo con el teorema de Pitágoras,
22
2
121 ,,),( PAdAPdPPd
Figura 1.19

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Como P1 y A se encuentran en un plano paralelo al plano xy, la fórmula de distancia dice
que 2
12
2
12
2
1 )()(),( yyxxAPd . Según los comentarios anteriores
2
12
2
1 )(),( zzAPd . Sustituyendo la formula anterior para ),( 21 PPd , se obtiene lo
siguiente:
FORMULA DE DISTANCIA (1.10)
Obsérvese que si P1 y P2 están en el plano xy de manera que z1 = z2= 0 entonces la formula
anterior se reduce a la formula de la distancia en dos dimensiones.
EJEMPLO 6
Calcular la distancia entre )1,3,1( A y )2,4,3( B
Solución
74)12()34(13)()(),( 2222
12
2
12
2
1221 zzyyxxPPd
DEFINICION (1.10)
La distancia entre dos puntos cualesquiera ),,( 1111 zyxP y ),,( 2222 zyxP es
2
12
2
12
2
1221 )()(),( zzyyxxPPd
El espacio vectorial R3 en tres dimensiones es el conjunto de todas
las ternas ordenadas zyx ,, de números reales llamados vectores,
tales que si 321 ,, aaaa , 321 ,, bbbb y c es un escalar entonces
(i) 332211 ,, babababa
(ii) ),,( 321 cacacaca

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Los vectores a1, a2, a3 son las componentes del vector 321 ,, aaa . Siguiendo el mismo
procedimiento que R2, se define:
DEFINICION (1.11)
Las propiedades de los vectores en dos dimensiones se pueden generalizar sin ningún
problema a R3, solo hay que tomar en cuenta la tercera componente
EJEMPLO 7
Sean 3,5,2 a y 7,1,4b . Encontrar a + b, 2a-3b y a .
Solución
38)3()5()2(
27,7,1621,3,126,10,47,1,433,5,2232
4,6,27,1,43,5,2
222
a
ba
ba
El siguiente teorema y su demostración so análogos al teorema 1.4
TEOREA 1.12
(i) 0,0,00
(ii) a 321 ,, aaa 321 ,, aaa
(iii) 2
3
2
2
2
1 aaaa
(iv) 332211 ,,)( bababababa
Si P1(x1, y1, z1) y P2(x2,y2, z2) son dos puntos cualesquiera, entonces
el vector a en R3 que corresponde a
21PP es
a = 121212 ,, zzyyxx .

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
EJEMPLO 8
Si se tienen dados los puntos )7,8,3()2,6,5( 21 yPP , encontrar el vector a en R3
correspondiente a
21PP
Solución
a = 9,2,827,68,53 .
Un vector a es un vector unitario si a = 1, los vectores unitarios especiales
0,0,1i , 0,1,0j , 1,0,0k
Son importantes por que cualquier vector puede expresarse como una combinación lineal
de i, j y k concretamente
kajaiaaaaa 321321 ,,
EJEMPLO 9
Expresar 2,4,3 a en términos de i, j, k y encontrar un vector unitario u que tenga la
misma dirección que a
Solución
Puede escribirse
kjia 2432,4,3
La magnitud a es
29)2()4()3( 2222
3
2
2
2
1 aaaa
Se aplica la formula del vector unitario
kjikjiaa
u29
2
29
4
29
3)243(
29
11

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
1.3 Producto escalar y vectorial con sus productos triples
PRODUCTO ESCALAR
Dos de los conceptos importantes relacionados con dos vectores a y b son el producto
escalar y vectorial, en esta sección se define en producto escalar.
DEFINICION 1.13
El símbolo ba se lee a punto b. El producto escalar se llama así mismo producto punto,
es importante tener presente que ba es un escalar y no un vector
EJEMPLO 10
Calcular ba para
(a) 3,4,2 a , 2,5,1b
(b) kjia 23 , kjib 254
Solución
(a) 12)2)(3()5)(4()1)(2(2,5,13,4,2
(b) 0)2)(1()5)(2()4)(3()254()23( kjikji
El producto escalar y el ángulo entre dos vectores están estrechamente relacionados.
DEFINICION DEL ANGULO ENTRE a y b (1.14)
El producto escalar ba de 321 ,, aaaa y 321 ,, bbbb es
332211 babababa .
Sean a y b dos vectores diferentes de cero.
(i) Si b no es un múltiplo escalar de a y si
OA y
OB son los
vectores de posición de a y b, respectivamente, entonces, el
ángulo entre a y b (o entre
OA y
OB ) es el Angulo AOB el
triangulo determinado por los puntos A, O y B (véase la
figura 1.20)
(ii) Si b = ca para un escalar c (es decir, si a y b son paralelos),
entonces 0 si c > 0 y si c < 0.

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
TEOREMA (1.15)
Dividiendo entre a b ambos lados de la formula en el teorema anterior se obtiene lo
siguiente
COROLARIO (1.16)
EJEMPLO 11
Calcular en ángulo entre 1,3,4 a y 2,2,1b
Solución Aplicando el corolario
º84.78263
4arccos
263
4
4411916
)2)(1()2)(3()1)(4(cos
ba
ba
El concepto de componente puede aplicarse a vectores a y b en R3 representándolos
geométricamente y dando la siguiente definición
DEFINICION (1.17)
Si es el ángulo entre dos vectores a y b diferentes de cero, entonces
cosbaba
Si es el ángulo entre dos vectores a y b diferentes de cero, entonces
ba
ba cos
Sean a y b dos vectores en R3 con 0b la componente de a a lo largo
de b se denota por acompb y se define por
bb
aacompb
1

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
EJEMPLO 12
Sean kjia 54 y kjib 236 calcular
(a) acompb (b) bcompa
Solución
(a) Usando la definición (1.17)
6.17
11
7
10324
)236(7
154)236(
)2()3()6(
154
1222
kjikjikjikjibb
aacompb
(b) Intercambiando los papeles de a y b en (1.17)
7.142
11
42
10324)54(
42
1236
1
kjikjia
abbcompa
PRODUCTO VECTORIAL
En esta sección se analiza el producto vectorial a x b de dos vectores en R3 a diferencia de
un escalar esta nueva operación produce un vector, se puede resolver con ayuda de sistema
de coordenadas rectangulares, sin embargo se hará a la inversa, comenzando con la
definición algebraica.
Al trabajar con productos vectoriales es conveniente usar determinantes. Un determinante
de orden 2 se define por
1221
21
21baba
bb
aa
En donde todas las letras representan números reales. Por ejemplo
221210)4)(3()5)(2(54
32
y

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
221210)2)(5()3)(4(32
54
Los determinantes exhiben una propiedad que tienen los determinantes de todos los
ordenes: el intercambio de dos renglones modifica el signo del determinante.
Un determinante de orden 3 se expresa por
3
21
21
2
31
31
1
32
32
321
321
321
cbb
aac
bb
aac
bb
aa
bbb
aaa
ccc
Esto se llama a veces desarrollo del determinante con respecto a la primera fila (o renglón).
El valor se puede obtener evaluando los determinantes de orden 2 en el lado derecho de la
ecuación.
EJEMPLO 13 Calcular el valor de
421
152
312
Solución Por definición
6427744)3)(54()18()2)(220(
)3(21
52)1(
41
12)2(
42
15
421
152
312
DEFINICION (1.18)
El producto vectorial a x b de 321 ,, aaaa y 321 ,, bbbb es
kbb
aaj
bb
aai
bb
aaaxb
21
21
31
31
32
32

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
El símbolo a x b se lee “a cruz b”. Obsérvese que la formula para a x b se obtiene
reemplazando c1, c2, c3 en la definición de determinante de orden 3 por los vectores
unitarios i, j, k esto sugiere la siguiente notación para la formula de definición (1.19)
NOTACION PARA EL PRODUCTO VECTORIAL (1.19)
El símbolo del lado derecho en (1.19) no es un determinante por que el primer renglón tiene
vectores en vez de escalares. Sin embrago, la notación de determinante es importante para
recordar la formula de definición (1.18) que es algo complicada, tomando en cuenta esta
diferencia, (1.19) puede usarse para evaluar productos vectoriales, como el siguiente
ejemplo.
EJEMPLO 14
Encontrar a x b para 6,1,2 a y 1,5,3b
Solución Escribiendo
153
612
kji
axb
Obtenemos
kji
kjikjiaxb
72031
)310()182()301(53
12
13
62
15
61
321
321
bbb
aaa
kji
axb

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
1.4 Aplicaciones físicas y geométricas de los productos escalares y
vectoriales.
APLICACIÓN FISICA
A continuación se presentará una aplicación física importante del producto escalar. De
acuerdo con la fórmula de trabajo FdW , donde W es trabajo, F es fuerza y d es
distancia. Esta formula es muy restrictiva, pues solo puede usarse cuando la fuerza se aplica
en la dirección del movimiento. En general, sea
PQ un vector que representa una fuerza
cuyo punto de aplicación se desplaza a lo largo de un vector
PR . Esto se ilustra en la
figura 1.21, en la que una fuerza
PQ se utiliza para tirar de un objeto a lo largo de una
trayectoria horizontal de P a R. el vector
PQ es la suma de los vectores
PS y
SQ . Como
SQ no contribuye al movimiento horizontal, puede suponerse que el movimiento de P a R
es causado solo por
PS . Aplicando la formula de trabajo que es el producto de la
componente de
SQ en la dirección de
PR por la distancia
PR , es decir,
cosPQW
PR =
PRPQ
Figura 1.21

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Esto motiva la siguiente definición.
DEFINICION (1.20)
EJEMPLO 15 La magnitud y la dirección de una fuerza constante están dadas por
kjia 625 . Calcular el trabajo realizado cuando el punto de aplicación de la fuerza se
mueve de )2,1,1( P a )1,3,4( R .
Solución
Por el teorema (1.12), el vector en R3 correspondiente a
PR es 3,4,3 b . Si
PQ es una
representación geométrica de a, entonces, según la definición (1.20), el trabajo realizado es
518815
baPRPQ
Si, por ejemplo, la distancia está en metros y la magnitud de la fuerza en newtons, entonces
el trabajo realizado es 5J (joules). Si la distancia está en pies y la fuerza está en libras
fuerza (lbf), entonces el trabajo realizado es pielbf 5 (pielibras)
APLICACIÓN GEOMETRICA
Para terminar esta sección, se deducirán algunas formulas útiles usando vectores, la primera
se enuncia como sigue
FORMULA DEL PUNTO MEDIO (1.21)
El trabajo realizado por una fuerza constante
PQ cuando su
punto de aplicación se mueve a lo largo del vector
PR es
PRPQ
El punto medio que va de ),,( 1111 zyxP a ),,( 2222 zyxP es
2,
2,
2
212121 zzyyxx

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
EJEMPLO 16
Encontrar el punto medio que va del segmento (2,-3,6) a (3,4,-2)
Solución Usando el teorema 1.21 resultan las coordenadas del punto medio
2,
2
1,
2
5
2
)2(6,
2
43,
2
32
2,
2,
2
212121 zzyyxx
APLICACIÓN GEOMETRICA
Es fácil obtener una ecuación que tenga como gráfica a la esfera de radio r con centro en el
punto ),,( 0000 zyxP , como se ilustra en la figura 1.22, un punto ),,( zyxP está en la esfera si
y solo si
PP0 = r, equivalentemente
rzzyyxx 2
0
2
0
2
0
Figura 1.22

ITS Cálculo Vectorial
M.C. César Silva Beltrán.
Elevando al cuadrado ambos lados de está ecuación se obtiene el siguiente resultado
TEOREMA (1.22)
Desarrollando los cuadrados de la expresión (1.22) y simplificando, se ve que está ecuación
de la esfera puede escribirse de la forma
0222 dczbyaxzyx
Donde a, b, c y d son números reales. Inversamente, si se empieza con una ecuación de está
forma y la gráfica existe, completando cuadrados puede legarse a la forma (1.22) y, por lo
tanto, la gráfica es una esfera o punto.
EJEMPLO 17
Describir la gráfica de la ecuación
04486222 zyxzyx
Solución Completamos cuadrados como sigue:
25)2()4()3(
41694)44()168(96
4486
222
222
222
zyx
zzyyxx
zzyyxx
Comparando la última ecuación con (1.22) vemos que la gráfica es una esfera de radio 5
con centro (3,-4.-2)
NOTA: Si existen dudas de cómo completar un cuadrado, consulta el
siguiente link:
http://es.wikipedia.org/wiki/Completando_el_cuadrado
La esfera de radio r y centro ),,( 0000 zyxP tiene por ecuación
22
0
2
0
2
0 rzzyyxx







