

Página 1
Diseño y construcción de un circuito para la compensación en la ganancia en
función del de la profundidad de un sistema transmisor-receptor de señales
ultrasónicas
Salcedo García Aldo René
Licenciatura en Ingeniería Biomédica
_________________________
Asesor: Dipl. Ing. Enrique Luis
Hernández Matos
sesor

Página 2
ÍNDICE
1. INTRODUCCIÓN..........................................................................................................3
1.1 Utilidad y enfoque...........................................................................................3
1.2 Antecedentes....................................................................................................4
2. OBJETIVOS...................................................................................................................6
2.1. Objetivos Generales........................................................................................6
2.2. Objetivos Específicos......................................................................................6
3. DESARROLLO..............................................................................................................6
3.1. Búsqueda Bibliográfica...................................................................................6
3.2. Desarrollo Complementario............................................................................6
3.3. Composición Estructural.................................................................................7
3.4. Delimitación....................................................................................................7
3.5. Funcionamiento...............................................................................................8
3.6. Diseño del TGC..............................................................................................10
3.6.1. Multivibrador monoestable (SN74121N).......................................11
3.6.2. Amplificador Inversor.....................................................................13
3.6.3. Sumador Inversor............................................................................16
3.7. Diseño del circuito impreso ...........................................................................17
3.8 Diseño del módulo .........................................................................................18
4. RESULTADOS………………………………………………………………………...19
4.1 Instrumentación lógica.....................................................................................19
4.2 Instrumentación analógica................................................................................22
4.3 Circuito impreso...............................................................................................24
4.4 Módulo.............................................................................................................24
4.5 Rack…..............................................................................................................26
5. DISCUSIONES Y CONCLUSIONES……………………………………………........27
6. BIBLIOGRAFÍA…………………………………………………………………….....27

Página 3
1. INTRODUCCIÓN
1.1 UTILIDAD Y ENFOQUE
Los equipos que emplean el ultrasonido han ido aumentando su campo de
aplicación para el diagnóstico médico. Estos sistemas tienen gran futuro gracias al continuo
desarrollo tecnológico, al ser un equipo no invasivo que permite visualizar tejidos blandos y
órganos [1].
El funcionamiento básico de los equipos de ultrasonido empleados en la obtención
de imágenes es el llamado visualización modo A, el cual está conformado por las siguientes
etapas:
Figura1. Diagrama a bloques de un equipo transmisor-receptor de imágenes ultrasónicas.
El desarrollo y construcción de sistemas de instrumentación en ultrasonido
especialmente diseñados para apoyar la docencia puede contribuir a mejorar la calidad de
aprendizaje en ingeniería biomédica, y servir como base para desarrollar innovaciones
tecnológicas y generar más investigación. [2]
Algunas de las características especiales de estos sistemas son:
• Circuitería de fácil acceso
• Etapas bien localizadas

Página 4
• Etapas con funcionamiento y construcción observable
• Etapas con señales de salida bien definidas
Si un laboratorio de ingeniería biomédica en una universidad contara con un equipo
de ultrasonido compuesto por etapas contenidas en gabinetes metálicos y un manual de
prácticas orientadas al conocimiento de la física aplicada del ultrasonido, sería posible
lograr que el estudiante entendiera el funcionamiento del equipo, integrara sus
conocimientos y lograra un aprendizaje más completo. [3]
1.2 ANTECEDENTES
Siendo un área interdisciplinaria de estudio con la física, las matemáticas, la
ingeniería y la ciencia clínica, la educación de imagen médica se convierte en un tema
crucial y popular en Ingeniería Biomédica para los estudiantes, quienes pueden ser los
futuros profesionales en este campo. Lo que ha llevado a desarrollar materiales de
aprendizaje durante años [4].
Existen aún varios desafíos en la producción de programas educativos de alta
calidad EIB (educación de imagen biomédica). Estos incluyen las limitadas oportunidades
para la educación práctica, la escasez de libros de texto dirigidos a ingenieros,
especialmente universitarios, y en general, la falta de información, por lo que se han hecho
algunos intentos de generar programas didácticos enfocados al aprendizaje en ultrasonido.
[5]
A través de los años, se han realizado algunos proyectos utilizando diferentes
técnicas que buscan facilitar el aprendizaje del sistema de ultrasonido. Se han publicado
libros, tutoriales, simuladores, sistemas modulares, etc. [6]
En Estados Unidos, en 1979, se publicó el libro “Basic Physics in Diagnostic
Ultrasound”, en el cual, se pueden encontrar los pasos que se necesitan ir cubriendo para el
aprendizaje del ultrasonido (tanto de manera física como en su forma de onda), constaba de
10 prácticas realizadas para el entendimiento del mismo. Un libro que permite el buen
entendimiento de la física aplicada y las formas de onda de un sistema de ultrasonido. [3]
En Throndheim, Noruega. Se han desarrollado simuladores para ultrasonido, que
son técnicas de imagen, donde la interpretación de las imágenes depende de la
manipulación del operador de un sensor o una cámara. [7,8]. La complejidad de estos
simuladores ha variado mucho, desde las aplicaciones informáticas simples a sistemas
realistas que han incorporado un maniquí y un escáner de ultrasonido simulado, y se han
implementado en varias aplicaciones clínicas diferentes. [9]

Página 5
El objetivo de la universidad de Throndheim, ha sido desarrollar un simulador que
permita imitar los procedimientos de examen de ultrasonido del modo más realista posible,
ya que aún no se cuenta con esto. Sin embargo, esta más enfocado hacia el uso médico y no
permite observar las formas de la onda en cada etapa [8].
En la sección de medicina y biología de la revista IEEE, se publicó un artículo en el
año 2003, en el cual, utilizando recursos basados en la Web, se incluyeron libros de texto,
tutoriales, simuladores y archivos de enseñanza. Tomando como base esto, se realizó un
tutorial en línea para el aprendizaje de la física del ultrasonido, el cuál, demostró ser tan
eficaz y eficiente como las clases, ayudando a los estudiantes a aprender los conceptos
básicos de la ecografía. [10]
En la Facultad de Bioingeniería de la Universidad Nacional de Entre Ríos,
Argentina se presentaron tres estrategias didácticas para la práctica de laboratorios de la
materia de Imágenes en medicina, en los temas: Sistemas de TV Analógico, Sistema RGB y
Ultrasonido. Para el estudio del ultrasonido, se construyó una placa analógica que trabaja
en modo “A”, a escala didáctica, utilizando como pantalla el osciloscopio, y captando la
señal con transductores piezoeléctricos construidos por los profesores, a partir de
transductores de monitoreo fetal en desuso. De esta manera el alumno puede realizar el
seguimiento del acondicionamiento de la señal ultrasónica, desde su generación hasta su
representación, logrando realizar mediciones y efectuar el análisis de la señal, por medio de
un fantoma estandarizado. [11]
En el Instituto de Ingeniería Biomédica de la universidad tecnológica de Kaunas,
Lituania el investigador Jonn Dewey decidió desarrollar un sistema de experimentación que
permitiera el acceso y control de instrumentos reales de hardware; se realizaron
experimentos y cálculos, generaron informes y obtuvieron una evaluación de dichos
instrumentos. El sistema fue de tipo modular (sistema con software configurable y
módulos de hardware) y con capacidad de configuración flexible (los módulos podrían estar
compuestos en la arquitectura pre-definidas). Contaba con varias configuraciones aplicadas
para el registro del pulso; parámetros de visualización utilizando un osciloscopio emulado;
y experimentación Doppler para la investigación. Consistía en un software (basado en
LabVIEW) y los módulos de hardware. Este sistema generó resultados prometedores y
satisfacción en los estudiantes, los cuales se vieron motivados a crear material didáctico
más avanzado y versátil para los graduados de los programas de Ingeniería y Electrónica
Biomédica, además de crear herramientas de experimentación para los estudiantes de
doctorado. [12, 13,14]

Página 6
El observar tan buenos resultados en Lituania con un sistema modular para
ultrasonido nos dio apertura al diseño y construcción de un sistema que permita realizar el
aprendizaje didáctico esperado. [12]
2. OBJETIVOS
2.1. OBJETIVOS GENERALES
Diseñar y construir un equipo transmisor-receptor de imágenes de ultrasonido para
su aplicación en docencia.
2.2 OBJETIVO ESPECÍFICO
Diseñar y construir la etapa de un circuito para la compensación en la ganancia en
función de la profundidad de señales ultrasónicas para su aplicación en docencia.
3. DESARROLLO
3.1 BÚSQUEDA BIBLIOGRÁFICA
La primer parte para la elaboración del proyecto, consistió en hacer una búsqueda de
la bibliografía necesaria para realizarlo, determinar las diferentes etapas de adquisición que
conforman a un ultrasonido en modo A, y al ser un proyecto elaborado en partes por
diferentes alumnos, establecer los límites de cada una de las etapas, utilizando el libro de
ultrasonido diagnóstico[1] . Para hacer el diseño y construcción de la etapa de
compensación de ganancia en función del tiempo, se necesitó buscar en la red información
útil para su elaboración, hojas de especificación de los circuitos que se utilizaron y medios
para la implementación de dichos circuitos.
3.2 DESARROLLO COMPLEMENTARIO
Considerando que el ultrasonido en modo A, es diseñado en etapas por diferentes
alumnos, para implementarlas todas en conjunto, fue necesario hacer interconexiones, con
ayuda de un conector tipo peine al momento de revelar el circuito, usando una fuente de
alimentación regulada a diferentes voltajes para polarizar todos los circuitos analógicos
realizados de manera independiente. La fuente fue implementada tomando la corriente
alterna directamente del enchufe de la luz y usando los reguladores LM7805, LM7815 Y
LM7915 para obtener los +5v, +15v y -15v, respectivamente.

Página 7
3.3 COMPOSICIÓN ESTRUCTURAL
El equipo de ultrasonido (todas las etapas) constará de:
- Un circuito trasmisor para la excitación de un transductor ultrasónico.
- Un circuito receptor para la amplificación de radiofrecuencia.
- Un circuito para generar una compensación de la ganancia en función de la
profundidad.
- Un circuito para la compresión del rango dinámico de la señal de
radiofrecuencia y un demodulador de AM.
- Un convertidor analógico-digital, para digitalizar las señales.
3.4 DELIMITACIÓN
Inicialmente, se identificará que la compensación de la ganancia en función de la
profundidad (dentro de un sistema transmisor-receptor de señales ultrasónicas) debe de ir
sincronizada directamente con la etapa de generación de ultrasonido (trasmisor) y con el
amplificador de radiofrecuencias, como se muestra en la Figura 2.
Figura 2. Diagrama a bloques de un equipo transmisor-receptor de imágenes
ultrasónicas, con énfasis en la etapa de compensación de ganancia.
El proyecto consta de 4 partes:
- Simulación del circuito.
- Construcción del circuito TGC en protoboard, dicha señal se probó, calibró
y se observó su salida en un osciloscopio.

Página 8
- Diseño y elaboración de un circuito impreso (utilizando el circuito TGC
construido en la segunda parte), y montaje de los componentes en la placa.
- Construcción de un gabinete metálico, del tamaño adecuado, que permita
realizar las conexiones pertinentes del circuito hacia los conectores internos. Se
documentó el sistema desarrollado de manera sistemática.
3.5 FUNCIONAMIENTO
En la primera parte, se utilizó la paquetería de NI Multisim. Funciona como un
paquete de apoyo que permite simplificar el armado físico del circuito, observar el
comportamiento de ciertos componentes y realizar un diseño relativamente cercano al
armado final, además de evitar costos innecesarios.
Para la segunda parte, cabe mencionar que las ondas sonoras viajan a 1540 m/s en el
tejido suave. Por ejemplo, una señal de ultrasonido que tiene que viajar una suma de 30 cm
(15 cm de ida y 15 cm de regreso) tomará aproximadamente 195 μs, por lo que las ondas
sonoras conforme aumenta su distancia, y tiempo ya que es directamente proporcional,
disminuye su amplitud. La compensación de ganancia de tiempo apropiado (TGC por sus
siglas en inglés) necesita controlar el margen que hay entre el nivel de referencia y el ruido
de fondo, medido en decibelios, llamado rango dinámico (RD) de las señales de eco de
ultrasonido a su salida. El TGC se utiliza para compensar la atenuación de señales de eco
de ultrasonidos a lo largo de la profundidad, y RD para controlar el contraste de la imagen.
[17]. En la construcción del circuito TGC, se necesita que los ecos de propagación cortos
sean menos amplificados que los ecos con un tiempo de propagación mayor. [1]
Existen diferentes métodos para la realización del TGC. La más sencilla es un
sistema con una ganancia en 3 etapas que puede ser ajustada por el operador y utiliza una
ganancia dividida en 3 etapas: ganancia cercana, ganancia lejana y ganancia en la
pendiente. Es la más usada por su fácil manejo. También hay digitales que usan varios
algoritmos que realizan una señal auto calibrada [15, 16, 17, 18, 19, 20].
Pero en este proyecto se usó una ganancia dividida en 4 etapas, separada por
profundidad, donde se dividirá el rango de penetración ajustando cada etapa a 40 dB. Se
usa esta forma de TGC porque permite ver cómo se va modificando la señal en los
diferentes pasos, proporcionando en la ganancia de cada etapa una respuesta lineal. En los
ejemplos anteriores, en la primera, casi no se pueden observar los cambios de onda que se
requieren a detalle, y la digital lo hace directamente, por lo que no se observa ningún tipo
de cambio. El método usado no se ha encontrado en trabajos preliminares. [12]

Página 9
Usando un sistema de potenciómetros deslizables a la salida, ayudará a controlar
las amplitudes con las que serán visualizados los ecos en la imagen, tomando una gráfica de
ganancia contra profundidad (tiempo de ida y vuelta).
Figura 3. Gráfica de compensación de ganancia con respecto al tiempo.
Al ser un equipo de hardware para uso en docencia, solo existe la manera de
comprobarlo en el osciloscopio, si realmente está entregando la salida que se espera y con
ayuda de los potenciómetros deslizables observar si está cambiando la amplitud de las
ondas con respecto al tiempo que se esté observando, como se ve en la siguiente figura 3,
para cada eco debe poder ajustarse la ganancia.
Figura 4. A) Señal de radiofrecuencia que muestra la ganancia al variar el rango
dinámico. B) Potenciómetros deslizables en aumento, representa la ganancia en amplitud
(voltaje) conforme al rango de la señal. C) La variación de la ganancia que se espera
obtener al variar el rango dinámico.
Es decir, se probará, introduciendo una señal de radiofrecuencias y se verá cómo se
modifica la amplitud de los ecos (dentro de la curva de compensación de ganancia),
observando si se amplifica la ganancia en voltaje y si realmente está corrigiendo dicha
ganancia dentro de 40dB (como se observa en la figura 4 A), en donde la relación entre los
potenciómetros deslizables y la gráfica de ganancia es directamente proporcional, es decir,
si se desliza hacia abajo el potenciómetro, disminuirá la ganancia en ese sector.

Página 10
Para observar el funcionamiento del TGC en el osciloscopio, se tomó como base el
reloj de sincronía (proporcionado en otra etapa del ultrasonido), el cual consiste en una
señal cuadrada con una frecuencia de 1KHz, es decir, de 1ms por ciclo. Al tener en cuenta
esto, a la salida del TGC, la ganancia debe poder ser manipulada de manera independiente
por los 4 potenciómetros deslizables, en diferentes rangos de tiempo (tomando solo el ciclo
positivo de la señal cuadrada). Ya que solo se toma el ciclo positivo, la señal tiene un
tiempo de 500 μs en total, de manera que el primer potenciómetro amplifica de 0 a 125 μs,
el segundo de 125 a 250 μs, el tercero de 250 a 375 μs y el cuarto de 375 a 500 μs.
Figura 5. Reloj de sincronía. Señal cuadrada de 1KHz.
La tercer parte, se diseñó un circuito impreso que permite fijar los componentes y
realizar interconexiones entre ellos mediante pistas, dichas pistas están conectadas a un
conector tipo peine, donde, se marcan las entradas y salidas, así como las fuentes de
alimentación del circuito completo y va fijo a una fuente de alimentación (rack). La salida
está marcada y conectada a un conector BNC para que pueda ser observada de manera
independiente.
La cuarta parte consistió en diseñar el gabinete metálico construido del tamaño
exacto (en este caso tiene el doble de altura que los demás módulos, para poder fijar los
potenciómetros deslizables por fuera), de manera que ensamble correctamente en la fuente
externa. Éste contiene un panel frontal con un conector tipo BNC incrustado, que permite
observar la forma de onda al conectarlo con el osciloscopio.
3.6 DISEÑO DE LA COMPENSACIÓN DE GANANCIA EN FUNCIÓN DE LA
PROFUNDIDAD (TGC)
Para el diseño del TGC se utilizaron 4 circuitos conocidos como multivibrador
monoestable (SN74121N), dichos circuitos van conectados en cascada para poder

Página 11
sincronizar la onda cuadrada del reloj de sincronía, de tal manera que pueda utilizar solo el
ciclo positivo. Cada una de las salidas de éstos circuitos, de manera independiente, va
conectada a un amplificador inversor utilizado como un circuito atenuador, a su vez, las
salidas de cada uno de los inversores va conectada a otro amplificador inversor, en donde
las ganancias son manipuladas por los potenciómetros deslizables que irán empotrados en
el módulo. Todas las salidas irán conectadas a un sumador inversor, que permite unir las
señales en una sola, la salida generada por las señales englobadas, pasa por un amplificador
inversor, simplemente para invertir la señal y verla en el ciclo positivo.
Figura 6. Diagrama con las conexiones del TGC completo.
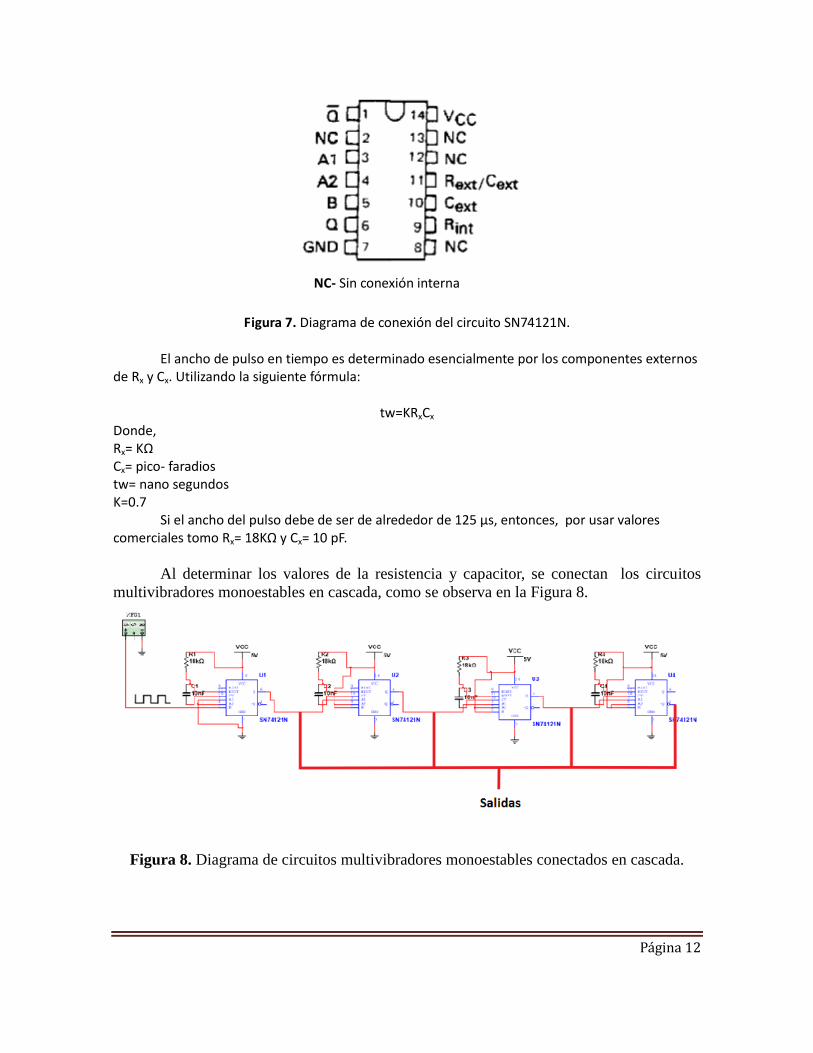
3.6.1 MULTIVIBRADOR MONOESTABLE (SN74121N)
El circuito SN74121 es un multivibrador monoestable con la ventaja de que puede
dar un disparo, tanto en el ciclo positivo, como en el ciclo negativo y tiene salidas
complementarias. Se adapta una resistencia interna de 2kohms que sirve para dar un tiempo
al disparo, esto por conveniencia del diseño minimiza el número de componentes y los
problemas de diseño, para utilizarlo es necesario conectar RINT A Vcc. Puede ser utilizado
con solo un capacitor externo. La entrada A es un disparo que se activa con un flanco de
bajada, mientras que la entrada B es un disparo que se activa con un flanco de subida. El
ancho de pulso puede variar desde 30 ns hasta 28 segundos, varía dependiendo de las
combinaciones aplicadas en Rx y Cx. Además, tiene una alta inmunidad al ruido de Vcc y
variaciones de temperatura [22].
Página 12
Figura 7. Diagrama de conexión del circuito SN74121N.
El ancho de pulso en tiempo es determinado esencialmente por los componentes externos de Rx y Cx. Utilizando la siguiente fórmula:
tw=KRxCx Donde, Rx= KΩ Cx= pico- faradios tw= nano segundos K=0.7 Si el ancho del pulso debe de ser de alrededor de 125 µs, entonces, por usar valores comerciales tomo Rx= 18KΩ y Cx= 10 pF.
Al determinar los valores de la resistencia y capacitor, se conectan los circuitos
multivibradores monoestables en cascada, como se observa en la Figura 8.
Figura 8. Diagrama de circuitos multivibradores monoestables conectados en cascada.
NC- Sin conexión interna

Página 13
3.6.2 AMPLIFICADOR INVERSOR
El amplificador operacional es un dispositivo electrónico que ha sido diseñado para
captar la diferencia entre las señales de voltaje aplicadas en sus terminales de entrada (es
decir, la cantidad v2-v1), multiplicar esto por un número A y provocar que el voltaje
resultante A (v2-v1) aparezca en la terminal de salida 3. Cuando se habla del voltaje en una
terminal se refiere al voltaje entre esa terminal y tierra; por tanto, v1 es el voltaje aplicado
entre la terminal 1 y tierra. A la terminal 1 se le denomina terminal inversora de entrada y
se distingue con un signo “-“, mientras que la 2 es la terminal no inversora de entrada y se
distingue con un signo “+”.[22] En un amplificador inversor la señal de entrada vi se introduce por la terminal
inversora. Si se tiene en cuenta que la Zi (impedancia de entrada) es muy elevada:
+I=
-I =0
Despreciando la corriente que entra por la terminal inversora (–I), se tiene:
Ii=-If
Siendo la salida vo:
vo= If*Rf
Existiendo un desfase en la tensión de salida de 180°.
Figura 9. Circuito de un amplificador operacional inversor.
Tomando los valores esperados, el pulso generado por el multivibrador monoestable
debería ser de 4.5v, por lo que al pasarlo por el atenuador y al intentar de obtener una señal

Página 14
a la salida de 10 mV aproximadamente, se utilizó una resistencia Ri= 100KΩ y una Rf=
2.2KΩ, de tal manera que al hacer los cálculos fueran:
Cada una de las salidas de los multivibradores monoestables quedaría conectada a
un amplificador inversor, se observa en la Figura 10, como un acercamiento y, en la
Figura 11, como quedaría el circuito hasta este punto.
Figura 10. Circuito multivibrador monoestable en cascada con un atenuador.
Figura 11. Circuitos multivibradores monoestables unidos a los atenuadores.
Una vez que se obtiene la atenuación de las señales, se introducen de manera
independiente en amplificadores con potenciómetros deslizables para que se pueda
manipular desde 10 mv hasta 10 volts de preferencia.

Página 15
Tomando los valores esperados, la señal debería tener una amplitud de
aproximadamente 10mv, por lo que ahora utilizó resistencias Ri= 10Ω y potenciómetros de
Rf= 10 KΩ, al hacer los cálculos se tendría:
Cada una de las salidas de los atenuadores se conecta en cascada como se observa
en la Figura 12 (acercamiento) y la Figura 13.
Figura 12. Acercamiento del multivibrador monoestable conectado con el atenuador y con
el amplificador inversor.
Figura 13. Circuitos multivibradores monoestables en cascada con atenuadores y
amplificadores.
Página 16
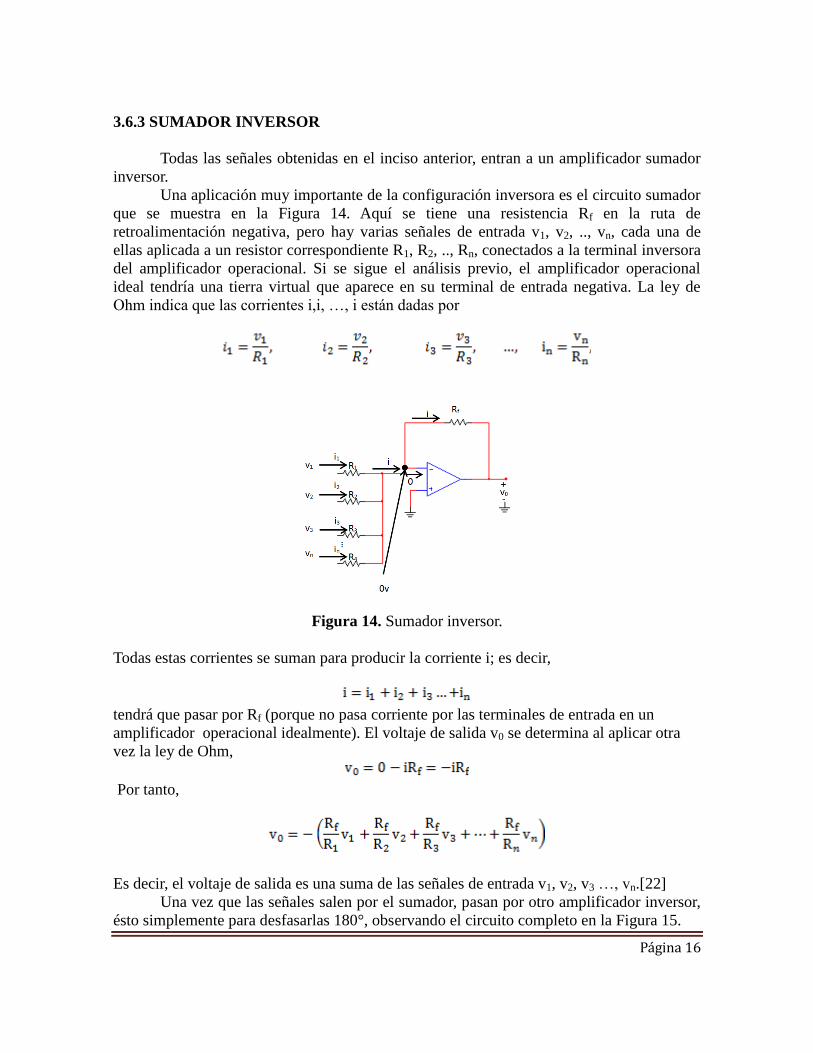
3.6.3 SUMADOR INVERSOR
Todas las señales obtenidas en el inciso anterior, entran a un amplificador sumador
inversor. Una aplicación muy importante de la configuración inversora es el circuito sumador
que se muestra en la Figura 14. Aquí se tiene una resistencia Rf en la ruta de
retroalimentación negativa, pero hay varias señales de entrada v1, v2, .., vn, cada una de
ellas aplicada a un resistor correspondiente R1, R2, .., Rn, conectados a la terminal inversora
del amplificador operacional. Si se sigue el análisis previo, el amplificador operacional
ideal tendría una tierra virtual que aparece en su terminal de entrada negativa. La ley de
Ohm indica que las corrientes i,i, …, i están dadas por
Figura 14. Sumador inversor.
Todas estas corrientes se suman para producir la corriente i; es decir,
tendrá que pasar por Rf (porque no pasa corriente por las terminales de entrada en un
amplificador operacional idealmente). El voltaje de salida v0 se determina al aplicar otra
vez la ley de Ohm,
Por tanto,
Es decir, el voltaje de salida es una suma de las señales de entrada v1, v2, v3 …, vn.[22] Una vez que las señales salen por el sumador, pasan por otro amplificador inversor,
ésto simplemente para desfasarlas 180°, observando el circuito completo en la Figura 15.

Página 17
Figura 15. Circuito TGC completo.
3.7. DISEÑO DEL CIRCUITO IMPRESO
Para hacer el circuito impreso, primero se diseñó en el programa Corel Draw
tomando en cuenta las separaciones entre cada uno de los componentes y principalmente
del conector tipo peine, para que ajustará de manera correcta en el rack predispuesto para
alimentar los circuitos en conjunto, e intentando hacer el menor número de puentes en la
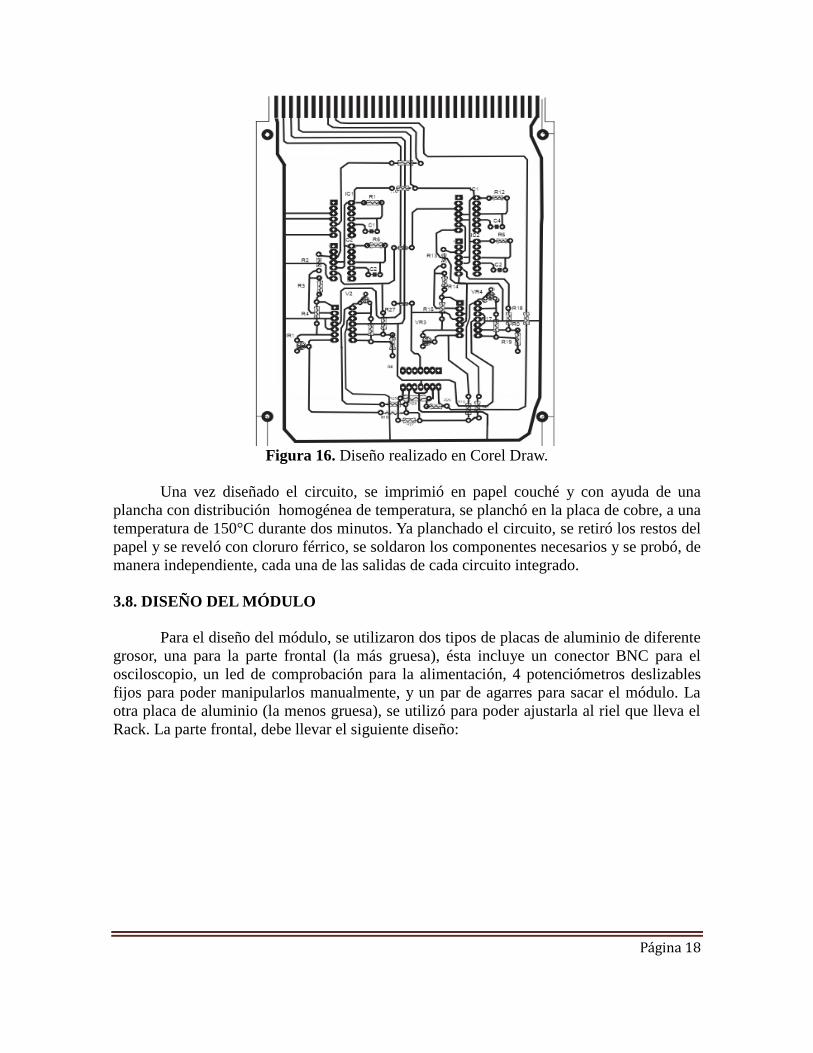
tarjeta armada. El diseño del circuito quedó como se observa en la Figura 16.
Página 18
Figura 16. Diseño realizado en Corel Draw.
Una vez diseñado el circuito, se imprimió en papel couché y con ayuda de una
plancha con distribución homogénea de temperatura, se planchó en la placa de cobre, a una
temperatura de 150°C durante dos minutos. Ya planchado el circuito, se retiró los restos del
papel y se reveló con cloruro férrico, se soldaron los componentes necesarios y se probó, de
manera independiente, cada una de las salidas de cada circuito integrado.
3.8. DISEÑO DEL MÓDULO
Para el diseño del módulo, se utilizaron dos tipos de placas de aluminio de diferente
grosor, una para la parte frontal (la más gruesa), ésta incluye un conector BNC para el
osciloscopio, un led de comprobación para la alimentación, 4 potenciómetros deslizables
fijos para poder manipularlos manualmente, y un par de agarres para sacar el módulo. La
otra placa de aluminio (la menos gruesa), se utilizó para poder ajustarla al riel que lleva el
Rack. La parte frontal, debe llevar el siguiente diseño:

Página 19
Figura 17. Diseño de la parte frontal del módulo.
Figura 18. Diseño del módulo con riel para el Rack.
4. RESULTADOS
Los resultados obtenidos, están descritos en diferentes etapas como sigue:
4.1 INSTRUMENTACIÓN LÓGICA
Observando la Figura 8, la salida de cada uno de los circuitos (ubicada en el pin6,
respectivamente) se observan las señales obtenidas en cada una de éstos:

Página 20
Figura 19. a) Señal obtenida a la salida del primer integrado SN74121N a) Señal simulada
b) Señal obtenida directamente del osciloscopio.
A la salida del primer integrado, se observa un pulso que se genera cada vez que
existe un flanco de subida, dicho pulso tiene una duración de aproximadamente 125 µs.
A la salida del segundo integrado, se observa (al igual que en el primero) un pulso
de 125 µs aproximadamente, pero esta vez se genera con el flanco de bajada del primero
como se observa en la Figura 20.
Figura 20. a) Señal obtenida a la salida del segundo integrado SN74121N a) Señal
simulada b) Señal obtenida directamente del osciloscopio.

Página 21
A la salida del tercer integrado, se observa un pulso del mismo tamaño que en los 2
integrados anteriores (125 µs aproximadamente), generándose en el flanco de bajada del
segundo integrado, como se observa en la Figura 21.
Figura 21. a) Señal obtenida a la salida del tercer integrado SN74121N a) Señal simulada
b) Señal obtenida directamente del osciloscopio.
A la salida del cuarto integrado, se observa un pulso del mismo tamaño que en los
integrados anteriores (125 µs aproximadamente), generándose en el flanco de bajada del
tercer integrado, como se observa en la Figura 22.
Figura 22. a) Señal obtenida a la salida del cuarto integrado SN74121N a) Señal simulada
b) Señal obtenida directamente del osciloscopio.

Página 22
Se puede observar en todos los pulsos, que además de medir lo mismo en el tiempo,
tienen la misma amplitud (aproximadamente de 3.6V), por lo que puede utilizarse el mismo
tipo de atenuador para cada uno de ellos.
4.2 INSTRUMENTACIÓN ANALÓGICA
Tomando cada una de las salidas en los circuitos SN74121, al pasarlas por un
circuito atenuador como el planteado en la metodología de 100KΩ y realimentada por una
de 2.2 KΩ, no obtenía los 10 mV esperados, por lo que se usó una resistencia de 180 Ω en
lugar de la de 2.2, obteniendo las siguientes señales:
A la salida de cada uno de los atenuadores se obtiene una señal muy pequeña, pero
con la misma amplitud para cada uno de los pulsos en los diferentes sectores de la señal.
Figura 23. A) Señal obtenida en la salida del primer atenuador (simulada y en
osicloscopio). B) Señal obtenida en la salida del segundo atenuador (simulada y en el
osciloscopio). C) Señal obtenida en la salida del tercer atenuador (simulada y en el
osciloscopio). D) Señal obtenida en la salida del cuarto atenuador (simulada y en el
osciloscopio).
Como se puede ver en la Figura 23, todas las señales que se obtienen son por debajo
de los 20 mv, lo que permite una mayor variación en las ganancias de cada una de las
señales.

Página 23
Cada una de las señales atenuadas pasa por un amplificar que varía su amplitud con
un potenciómetro de 10 KΩ, y cada una de las salidas de éstas pasa a un circuito sumador
inversor, finalmente por otro inversor que solo desfasa la última señal en 180° y queda
como se muestra en la Figura 24 y Figura 25.
Figura 24. Como se muestra en la simulación. Canal 1, la señal final. En el canal 2, señal
de entrada. Canal 3, señal antes de pasar por el último inversor.
En el canal 1, es la señal que se obtiene al pasar por todas las etapas, una señal de
alrededor de 13.3 V de amplitud y variable con los potenciómetros deslizables (señal de
salida). En el canal 2, solo se observa la señal de entrada (señal cuadrada con 1KHz de
frecuencia), para determinar que si están sincronizadas las señales. El tercer canal muestra
la señal antes de que pase por el último circuito inversor (desfasada 180°).
Figura 25. Señal de salida que va desde 12 mV hasta 9.6 V.
Como se observa en la figura 25 que es la señal de salida, ésta se puede manipular
en cuatro segmentos y de manera sincronizada, haciendo una amplificación de 800 veces,
es decir, de alrededor 58.06 en dB.

Página 24
4.3 CIRCUITO IMPRESO
Como se observa en la Figura 26, quedó la tarjeta del circuito impreso, y los
componentes ya soldados, con conectores en azul para las alimentaciones y pruebas
externas de las señales.
Figura 26. A) Tarjeta del circuito impreso. B) Circuito de componentes soldados.
4.4 MÓDULO
Cumple con las características del diseño del módulo. De acuerdo a como se
observa en la Figura 27, es del doble de alto que los módulos de las otras etapas, de otra
manera, no cabrían los potenciómetros deslizables que sirven para amplificar la señal.
Se observa el módulo por partes en la Figura 27 y ya completamente armado en la
Figura 28, que es el resultado final del proyecto, compuesto por el circuito impreso
ajustado al rack para obtener los valores de alimentación necesarios ensamblado al módulo
para ser utilizado en el riel del Rack.
A) B)

Página 25
Figura 27. Módulo diseñado, por partes, visto desde diferentes puntos.
Figura 28. Módulo armado con la placa del circuito impreso ajustada, interconectada por
medio de cables dupont con los potenciómetros y salida.

Página 26
La Figura 28, muestra el módulo armado y ajustado de tal manera que entre en el
Rack, junto con el circuito impreso hecho a la medida para que el conector tipo peine entre
en la alimentación. Los potenciómetros deslizables, llevan soldados conectores tipo hembra
al igual que la salida del circuito (de cables dupont), mientras que la placa del circuito
impreso tiene conectores tipo macho, por lo que se interconectan con cables dupont macho
hembra, divididos en hilos de 3.
4.5 RACK
Figura 29. Rack, utilizando una fuente con diferentes voltajes.
En la Figura 29, se puede observar el Rack, con los diferentes voltajes. Visto de
frente, de izquierda a derecha, los voltajes quedarían: Tierra (sin voltaje), +15v, -15v, +5v,
-5v y el sexto varía de entre -500mv y +5v. En el conector tipo peine del circuito impreso,
se toma la misma convención para alimentarlo.
Figura 30. Rack, utilizando una fuente con diferentes voltajes

Página 27
En la Figura 30, se puede ver el Rack completo, ya con los módulos puestos y con
cada uno de los circuitos impresos montados, y con la fuente alimentando los voltajes
pertinentes. El primer módulo visto de arriba abajo es el TGC ya completo.
5. Discusiones y Conclusiones
Los pulsos vistos en cada uno de las salidas se deben de generar a partir de una
señal de 1KHz de frecuencia (reloj de sincronía), en caso de que cambie la frecuencia, se
seguirían generando los pulsos de 125µs, uno tras otro, pero en algún momento habría una
desincronización, dependiendo de la frecuencia que se esté utilizando. La señal de entrada,
debe de tener una amplitud mayor a 3.5 v, ya que de no ser así, los circuitos integrados no
darían ningún tipo de pulso. Cada una de las salidas de los diferentes integrados está
rotulada en la placa (de manera abreviada y con una lista del significado de esas
abreviaciones en el anexo) para poder determinar si existe cualquier falla independiente en
cualquier parte del circuito.
Originalmente iba a funcionar como una fuente de voltaje controlada por corriente,
sin embargo, al utilizar un reloj de sincronía y observar que todo el circuito se manejaba en
voltajes, en caso de haberlo manejado de esta forma, no podría acoplarse con las otras
etapas (reloj de sincronía y amplificador de radiofrecuencia).
Existen integrados más exactos y que generan una ganancia mucho mejor
controlada como es el circuito ad603 que es un VGA (Variable Gain Amplifier), el cual al
simularlo era más fácil de controlar, manejaba altas frecuencias y no metía prácticamente
ruido, pero al utilizar este tipo de circuitos integrados, el precio de elaboración del circuito
se disparaba bastante, con lo que ya no estaría cumpliendo con el objetivo, al ser para
docencia, debe de ser lo más sencillo y económico posible.
El ruido de línea no afectó al momento de comprobar el circuito, e incluso
utilizando un filtro notch para eliminar el poco ruido que se acoplara, no hizo ningún
cambio en el circuito, por lo que no fue necesario el uso de filtros.
El circuito puede obtener una ganancia mayor en cada sector, simplemente habría
que aumentar el valor de los potenciómetros, es decir, en lugar de usar potenciómetros de
10 KΩ, se pueden utilizar de alrededor de 100KΩ, con lo que los decibeles aumentarían.
6. Bibliografía
[1]Enrique HM, Capoulican MG. Ultrasonido Diagnóstico. Editorial USACH; Chile; 2013.
Capítulo 1. Introducción; p. 17-21: Capítulo 6. Sistemas para generación de imágenes por
ultrasonido; p. 105-112

Página 28
[2]Valencia M. José. Diseño de un sistema de servicios web para la institución
educativa.Ingenium [Internet] 2011 junio. 5(9):39-45. Disponible
en:http://www.usc.edu.co/ingenieria/files/INGENIUM-UNO-5-9.PDF
[3]Rose, J.L.; Goldberg, B. B.; “Basic Physics in Diagnostic Ultrasound” Editorial John
Wiley & Sons; Estados Unidos; 1979.
[4]Dawei Wu, Aditya Dikshit, Wheizao Zao. Medical Imaging curriculum development: an
interactive simulation system for different modalities. Florida USA. Department of
biomedical Engineering. 1p.
[5] Nguyen JD, Paschal CB. Development of online ultrasound instructional module and
comparison to traditional teaching methods. J. Eng. Educ; vol. 91; no. 3; 2002; pp. 275-283
[6]Guillermo Avendaño Cervantes. Simulación: Nuevas tecnologías para la enseñanza en
disciplinas de la salud [Internet]. Valparaíso Chile. Universidad de Valparaíso. 2010
Octubre [Citado 2013 Octubre 11].
Disponible en: -
http://events.ieeechile.cl/congresonti/wpcontent/uploads/2012/09/GUILLERMO
AVENDA%C3%91O-Simulaci%C3%B3n-Nuevas-Tecnolog%C3%ADas-en-la-
Ense%C3%B1anza-en-Diciplinas-de-la-Salud.pdf
[7]David J. Vining, David R. Stelts, David K. Ahn, Paul F. Hemler, Yaorong Ge, Gordon W.
Hunt, Christopher Siege, Daniel B. McCorquodale, Mark E. Sarojak, and Gilbert R.
Ferretti. Freeflight: A virtual endoscopy system. In Jocelyne Troccaz, Eric Grimson, and
Ralph M¨osges, editors, CVRMed- MRCAS’ 97. First Joint Conference. Computer Vision,
Virtual Reality and Robotics in Medicine and Medical Robotics and Computer-Assisted
Surgery. Proceedings, volume 1205 of Lecture Notes in Computer Science, pages 413–
416, Grenoble, France, 1997.
[8] Maul H, Scharf A, Baier P, Wuestemann M, Guenter HH, Gebauer G, Sohn C.
Ultrasound simulators: experience with the sonotrainer and comparative review of other
training systems. 2004; Capítulo 3. Ultrasound in Obstetrics and Gynecology; p.581–585.
[9]Lars E. Real time ultrasound simulation: Application to a medical training simulator.
Master of Science in Physics and Mathematics; Norwegian University of Science and
Technology; 2008; p. 1-19
[11]Paschal, C.B. The need for effective biomedical imaging education.Engineering in
Medicine and Biology Magazine, IEEE Octubre 2003. 22(4):88-91. Disponible
en:http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=1237507&url=http%3A%2F%2
Fieeexplore.ieee.org%2Fxpls%2Fabs_all.jsp%3Farnumber%3D1237507
[12] Bonfils, Bizai, Salvatelli. Desarrollo de Estrategias Didácticas para la Realización de
Laboratorios en la Cátedra Imágenes en Medicina [Internet]. Argentina (Paraná): Univ.
Nac. De Entre Ríos, Facultad de Ingeniería y Bioingeniería; 25-27 Agosto 2004. Disponible
en: http://www.bioingenieria.edu.ar/grupos/geic/biblioteca/Trabypres/ T04TCAr22.pdf.

Página 29
[13]Jurkonis R., Marozas V., Lukoševičius A. Ultrasound Medical Diagnostics: Practical
lab works with virtual instruments (in Lithuanian) // Kaunas: Technologija, 2007, ISBN:
978-9955-25-337-2.
[14]Jurkonis R., Marozas V., Lukoševičius A. Ultrasound medical diagnostics laboratory
for remote learning in EVICAB campus // International Joint Conferences on Computer.
Information and Systems Sciences and Engineering (CIS2E07). – 3-12 Diciembre, 2007. –
Technically Co-Sponsored by: Institute of Electrical & Electronics Engineers (IEEE).
University of Bridgeport. Internet link:<http://www.cisse2007.org/cisse2007.aspx>.
[15]V.Marozas, R. Jurkonis, Lukoševičius A. Development of Virtual and Remote Lab
Experimentation System for electronics Engineering. Electronics and Electrical
Engineering [Internet]. 2008[citado 2013 octubre 11]; 7(87):41.
[16] Lee D., Yong Sun Y., Beom, J. Automatic time gain compensation and dynamic range
control in ultrasound imaging systems. Proc. of SPIE. 2006 [citado 2013 octubre 20].;
6147(7): 5.
[17] Hughes D. I., Duck F. A. Automatic attenuation compensation for ultrasonic imaging.
Ultrasound Med. Biol. 1997[citado 2013 octubre 20]; 23: 651-664.
[18] Richard W. D. A new time-gain correction method for standard B-mode ultrasound
imaging. IEEE Trans. Med. Imag. 1989 [citado 2013 octubre 20]; 8: 283-285.
[19] Herrick T., Bryant A. Automated gain control for medical diagnostic ultrasound
imaging. Proc. IEEE Circuits and Systems. 12-14 Agosto, 1990[citado 2013 octubre 20];1:
208-210.
[20] Bryant A., Herrick T. J. Adaptive gain control and contrast improvement for medical
diagnostic ultrasound B- mode imaging system using charge-couples devices. Proc. IEEE
Circuits and Systems. 14-17 Mayo, 1991[citado 2013 octubre 20];2: 685-687.
[21] Richard B., Charliac O. A new digital adaptive time gain correction for B-mode
ultrasonic imaging. Proc. IEEE Engineering in Medicine. 29 de octubre, 1992[citado 2013
octubre 20]; 5: 2131-2132.
[22] Adel S, Keneth S. Circuitos Microeléctrónicos. Editorial McGraw-Hill Interamericana;
2006. Capítulo 2; 75-80







