

Robótica Inteligente
Tema 3: Sensores y Actuadores
L. Enrique Sucar
Marco López
ITESM Cuernavaca

Sensores
• Introducción• Tipos –cantidad física:
– Luz– Fuerza– Sonido– Posición y orientación
• Tipos –función:– Proximidad y rango– Tactil– Estado interno

Introducción
• Los sensores permiten al robot percibir su medio ambiente y su estado interno
• Dos tipos básicos:– Sensores de estado interno– Sensores de estado externo
• Desde otro punto de vista se pueden clasificar en:– Activos: emiten energía o modifican el
ambiente– Pasivos: reciben energía pasivamente


Consideraciones generales
• Campo de vista
• Rango de operación
• Exactitud y resolución
• Velocidad (operación en tiempo real)
• Requerimientos computacionales
• Potencia, peso y tamaño
• Robustez (redundancia)

Sensitividad
• Grado de cambio de la señal de salida del sensor en función del cambio de la señal física medida:
Dr / r = S [Dx / x]
r – señal del sensorx – cantidad medidaS – sensitividad

Rango

Sensores de Luz
• Perciben la luz, ya sea en el rango visible o en el infrarrojo
• Tipos:– Fotoceldas
– Fotoresistencias
– Fototransisitores
– Fotodiodos
– Laser
– Cámasras

Fotoresistencias

Fototransistores
Telémetro laser
• Emite energía laser en una secuencia de impulsos cortos
• Se mide el tiempo en que tarda en regresar la luz reflejada por el objeto
• Se calcula la distania al objeto• Ejemplo: láser Sick:
– 360 lecturas cada ½ grado – 180 grados– Cada 1/10 de segundo– Alcance de 50m con resolución de 5cm

Cámaras
• Tipos de luz:– Visible– Infrarroja
• Cámaras:– Manocromáticas / color– Analógicas / digitales– Pasivos / activos (puntos, línea láser)

Sensores de fuerza
• Micro-interruptores
• “bigotes”
• Acelerómetros
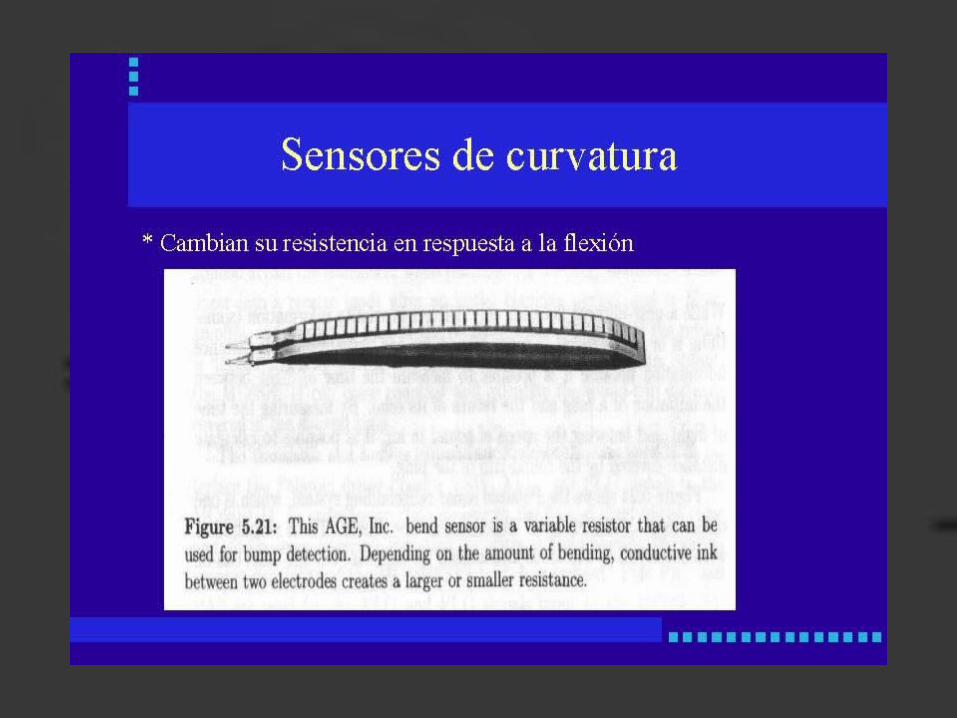
• Sensores de curvatura


Sonidos
• Micrófonos – trabajan con frecuencias audibles
• Sensor de pelicula piezoeléctrica – producen un voltaje cuando hay cambios en la cantidad medida (vibración, temperatura, ...)
• Sonar – miden el tiempo que tardan en recibir un sonido (no audible) emitido

Sensores de posición y orientación
• Odometría– Encoders– Incrementales / absolutos
• Navegación inercial– Giroscopios – Inclinación– Acelerómetros
• Brújula




Sensores de proximidad
Permiten inferir la distancia a objetos en elambiente:• Cercanos:
– Infrarojos
• Lejanos– Sonares– Laser

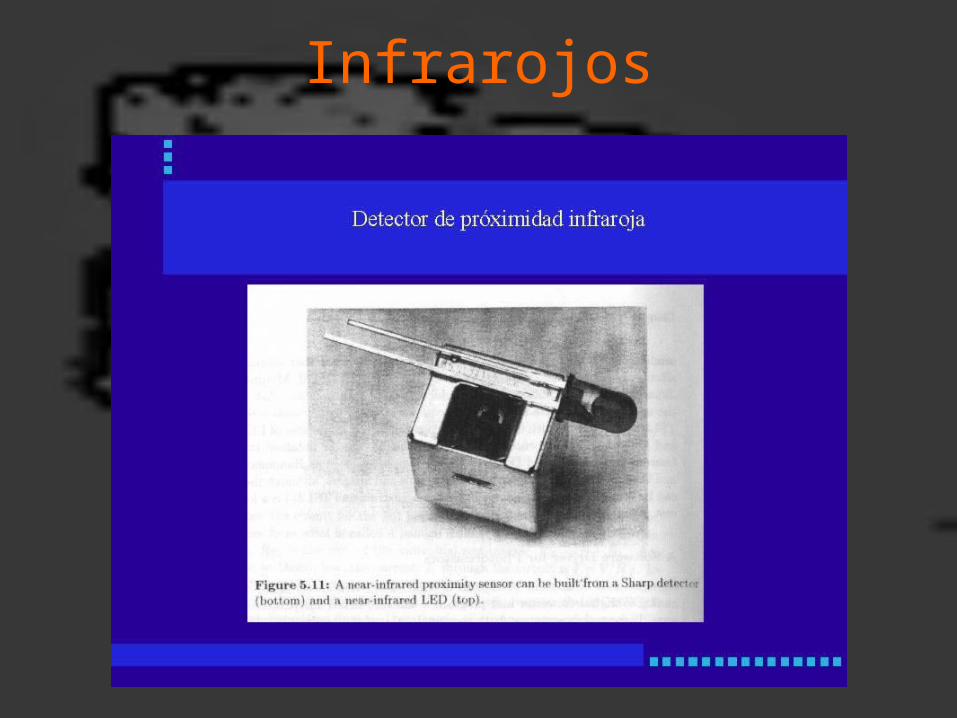
Infrarrojos
• Mediante la emisión y detección de luz infrarroja permiten la detección de obstáculos cercanos
• Tipos: binario / distancia• Rango: pocos cm a metros• Problemas:
– Interferencia de luz ambiental– Depende del color/propiedades de las superficies
Infrarojos

Infrarojos

Infrarojos

Infrarojos

Sonares
• Detectan obstáculos mediante la emisión de ultrasonido y detección del tiempo de retorno
• Rango: aprox. 10/20 cm a 5 m• Problemas:
– Patrón de emisión– Depende del tipo de superficie– Múltiples reflexiones





Arreglos de Sonares
• Normalmente se combinan varios sonares para tener un rango mayor y redundancia.
• Algunos arreglos comunes:– 1 sonar giratorio– Varios sonares al frente– 1 anillo de sonares (12, 16, ...)– 2 anillos de sonares a diferente altura– Sonares apuntando arriba y/o abajo
Telémetro laser
• Otro método para estimar la distancia a obstáculos, con mayor rango y mejor precisión que los sonares
• Tres métodos alternativos:– Triangulación – relación geométrica entre el
haz emitido y el haz recibido– Tiempo de vuelo – tiempo de regreso del haz – Basado en fase – diferencia de fase entre el haz
emitido y el haz reflejado

Telémetro laser

Apuntador laser con cámara
• Una alternativa más económica al telémetro laser es el usar una apuntador láser (punto o línea) combinado con una cámara
• La distancia al obstáculo se estima en base a la altura del punto o línea en la imagen y relaciones geométricas

Apuntador laser con cámara

Sensores de Contacto
• Permiten al robot detectar cuando hace contacto con los obstáculos
• Se usan principalmente para evitar daño al robot como último recurso (también se utilizan en manos robóticas)
• Dos formas de uso:– Como otro sensor que va al computador del robot– Conectado directamente al circuito de control de
los motores de forma que detenga automáticamente al robot

Sensores de Contacto
• Principales tipos:– Bumpers: microswitches en un arreglo
alrededor del robot– Materiales que cambian la resistencia o
capacitancia al acercarse a un obstáculo– “Bigotes”– Sensores de Curvatura– Medidores de corriente en los motores

Sensores internos
• Permiten al robot conocer su estado interno.• Entre los más comunes están
– Encoders – permiten determinar la posición absoluta o relativa del robot en función del movimiento de las ruedas (odometría)
– Brújulas – permiten estimar en forma aproximada la orientación del robot
– Giroscopios, acelerómetros, GPS– Medidores de energía, corriente de motores,
temperatura






Referencias
• [Jones, Flynn] – Cap 5
• [Dudek y Jenkin] – Cap 2
• H.R. Everett, “Sensors for mobile robots”, A K Peters, 1995.

Actividades
• Analizar para tu proyecto cuáles sensores son los más adecuados y su ubicación – entregar un reporte por equipo
• Termina de armar tu robot con los sensores (Lego o PPRK)







