

UNIVERSIDADE REGIONAL DO CARIRI - URCA
CENTRO DE CIÊNCIAS E TECNOLOGIA - CCT
DEPARTAMENTO DA CONSTRUÇÃO CIVIL: TOPOGRAFIA E ESTRADAS
TRABALHO DE CONCLUSÃO DO CURSO
OBSERVAÇÃO DO FATOR SIGMA NO PROCESSAMENTO DE COORDENADA
POR PPP
VAGNER RIBEIRO DE BRITO ALVES
JUAZEIRO DO NORTE - CE
2017

VAGNER RIBEIRO DE BRITO ALVES
OBSERVAÇÃO DO FATOR SIGMA NO PROCESSAMENTO DE COORDENADA
POR PPP
Trabalho de Conclusão de Curso apresentado à Comissão Examinadora do Curso de Tecnólogo da Construção Civil com habilitação em Topografia, da Universidade Regional do Cariri – URCA, como requisito para conclusão do curso. Orientador (a): Paulo Ricardo Evangelista de Araújo
JUAZEIRO DO NORTE - CE
2017

OBSERVAÇÃO DO FATOR SIGMA NO PROCESSAMENTO DE COORDENADA
POR PPP
Elaborado por Vagner Ribeiro De Brito Alves
Aluno do curso de Tecnologia da Construção Civil – URCA
BANCA EXAMINADORA
__________________________________________________
Paulo Ricardo Evangelista de Araújo (Orientador)
__________________________________________________
Prof. Dr. Eliakim Martins Araújo - URCA
__________________________________________________
Prof. Ernandes Venícios De Sousa Silva - URCA
Monografia aprovada em ______ /_______ /_________, com nota _______
JUAZEIRO DO NORTE - CE
2017

Dedico este trabalho aos meus pais,
Cosmo de Oliveira (in memorian) e Cícera
Ribeiro por terem contribuído diretamente
em minha formação pessoal e profissional
e também pelo apoio que me deram ao
longo dessa jornada.
AGRADECIMENTOS
Hoje, vivo uma realidade que parece um sonho, mas foi preciso muito esforço,
determinação, paciência, perseverança, ousadia e maleabilidade para chegar até
aqui, e nada disso eu conseguiria sozinho. Minha eterna gratidão a todos aqueles
que colaboraram para que esse sonho pudesse ser concretizado.
Sou grato primeiramente a Deus pelo dom da vida e por sempre estar
presente na minha vida permitindo que eu realize os meus sonhos, me guiando para
as melhores conquistas da minha vida.
Não poderia deixar de agradecer a minha mãe Cícera Ribeiro por me auxiliar
nesta caminhada, em que sempre me apoiou na medida do possível e dentro das
suas condições financeiras, bem como me forneceu a assistência necessária para
que eu pudesse realizar esse sonho. Em especial o meu querido pai Cosmo de
Oliveira falecido em 2015, por tudo que ele me ensinou, pelos conselhos, incentivos,
esforços, paciência, dedicação e especialmente por sempre acreditar no meu
potencial, ele não teve a oportunidade de presenciar a concretização deste sonho,
mas tenho certeza que ajudou, apoiou e torce de onde ele está, para que alcance e
tenha sucesso nesta nova jornada.
A minha namorada Viviane Mendes, por todo amor, companheirismo,
compreensão, apoio e por estar sempre ao meu lado, apoiando com cada palavra
que me dava força para levantar de cada obstáculo que aparecia.
A toda a minha família e também aos meus amigos, pelo apoio, pelo afeto e
pelo conselho que me tornaram um ser hoje digno.
Aos professores do curso de Tecnologia da construção civil da URCA, por
partilharem seu conhecimento cientifico e profissional, além dos conselhos e
orientações.
Ao professor e orientador deste trabalho Paulo Ricardo Evangelista de
Araújo, pelo conhecimento repassado, por toda sabedoria a mim depositado e pelo
dom da docência em repassar todo o conhecimento de forma clara e tão objetiva.
Aos amigos da graduação que me acompanharam ao longo dessa jornada,
sempre compartilhando conhecimento, pelos momentos de alegria que ficarão
guardados para sempre e que a partir de agora criamos laços eternos.

“O sucesso nasce do querer, da
determinação e persistência em se chegar
a um objetivo. Mesmo não atingindo o
alvo, quem busca e vence obstáculos, no
mínimo fará coisas admiráveis.”
José de Alencar

RESUMO
O presente trabalho visa observar a diferença do sigma das coordenadas
geodésicas obtidas através de dois tempos de rastreio diferentes, sendo um de 1
hora e outro de 2 horas, utilizando um GNSS geodésico Hi-target V30. Com a rápida
e constante evolução das tecnologias, o GNSS tem sido cada vez mais aplicado na
topografia. Infelizmente, em alguns casos, o entusiasmo pela sua utilização, tem
proporcionado trabalhos efetuados sem os cuidados requeridos, situação está que
deve ser modificada em função da conscientização dos usuários, tanto para a
questão do tempo de aquisição dos pontos em campo quanto à questão da maneira
de aquisição, permitindo assim aprimorar o produto final. O que trouxe a
necessidade desse estudo foi devido a uma alta dúvida referente a variação que
pode ocorrer no sigma de uma coordenada em relação a diferentes tempos de
coleta. Para a produção desse trabalho foi realizado um estudo bibliográfico das
recomendações das normas e de autores do ramo da construção civil, com relação a
técnicas de coletas de coordenadas geodésicas.
Palavras-chave: GNSS; Sigma; PPP.

SUMÁRIO
1 INTRODUÇÃO ...................................................................................................... 9
1.1 Justificativa ................................................................................................... 11
1.2 Objetivos ....................................................................................................... 12
1.2.1 Geral ...................................................................................................... 12
1.2.2 Específicos ............................................................................................. 12
1.3 Hipóteses ...................................................................................................... 12
2 CONSIDERAÇÕES GERAIS E REVISÃO TEÓRICA ......................................... 13
2.1 O GNSS ........................................................................................................ 13
2.2 Segmentos principais do GPS ...................................................................... 14
2.3 Método de posicionamento ........................................................................... 15
2.3.1 Posicionamento por ponto simples ou posicionamento absoluto ........... 15
2.3.2 Posicionamento por ponto preciso ......................................................... 16
2.3.3 Posicionamento relativo ......................................................................... 18
2.3.3.1 Posicionamento relativo estático ................................................. 19
2.3.3.2 Posicionamento relativo estático rápido....................................... 19
2.3.3.3 Posicionamento relativo semi cinemático .................................... 19
2.3.3.4 Posicionamento relativo cinemático ............................................. 20
2.4 Interferência de Sinal no GPS ...................................................................... 20
2.5 Desvio Padrão (Sigma) ................................................................................. 21
2.6 Sistema de Referência ................................................................................. 22
3 METODOLOGIA ................................................................................................. 24
3.1 Coleta dos Dados ......................................................................................... 27
3.2 Processamento dos Dados ........................................................................... 31
4 RESULTADOS E DISCUSSÕES ........................................................................ 33
5 CONCLUSÃO ..................................................................................................... 37
REFERÊNCIAS BIBLIOGRÁFICAS .......................................................................... 38
ANEXOS ................................................................................................................... 40

LISTA DE FIGURAS
Figura 1 – Constelação de Satélites .......................................................................... 10
Figura 2 - Principais sistemas do GNSS ................................................................... 13
Figura 3 - Segmentos Principais do GPS .................................................................. 15
Figura 4 - Posicionamento Por Ponto ........................................................................ 16
Figura 5 - Posicionamento Relativo ........................................................................... 18
Figura 6 - Multicaminhamento ................................................................................... 21
Figura 7 - Entrada Principal da Urca ......................................................................... 24
Figura 8 - GPS geodésico Hi-target V30 RTK ........................................................... 25
Figura 9 - Tela principal do serviço IBGE-PPP.......................................................... 26
Figura 10 - Arquivos disponibilizado pelo IBGE ........................................................ 26
Figura 11 - Base de 1 hora ........................................................................................ 28
Figura 12 - Nivelamento da Base .............................................................................. 28
Figura 13 - Estaca de Concreto ................................................................................. 29
Figura 14 - Base de 2 horas ...................................................................................... 30
Figura 15 - Interferências no Local da Base .............................................................. 31
Figura 16 - Relatório do Primeiro Rastreio ................................................................ 32
Figura 17 - Relatório do Segundo Rastreio ............................................................... 32
Figura 18 - Precisão Esperada para um Levantamento Estático. ............................. 35

9
1 INTRODUÇÃO
A comunidade técnica que opera atividades na área da Topografia tem como
premissa conhecer e posicionar pontos no globo terrestre, normalmente os
materializando em terrenos. Esse contexto é baseado na afirmação de Monico
(2008) onde o mesmo retrata que:
Posicionar um objeto nada mais é do que lhe atribuir coordenadas. Embora atualmente esta seja uma tarefa que pode ser realizada com relativa simplicidade, utilizando-se, por exemplo, satélites artificiais apropriados para esse fim, determinar a posição foi um dos primeiros problemas científicos que o ser humano procurou solucionar. O homem sempre esteve interessado em saber onde ele estava; de início restrito à vizinhança imediata de seu lar, mais tarde o interesse se ampliou para os locais de comércio e, finalmente, com o desenvolvimento da navegação marítima praticamente para o mundo todo. (p. 29)
Conforme Monico (2008), com o desenvolvimento eletrônico e a necessidade
de localização foram desenvolvidos os sistemas “[...] Loran (Long-Range Navigation
System), o Decca (Low frequency continous wave phase comparison navigation) e o
Omega (Global low frequency navigation system) ” mas esses sempre apresentavam
problemas e com isso foi desenvolvido o NAVSTAR-GPS (Global Positioning
System). De acordo com Monico (2008), esse sistema foi o “[...] sistema que
revolucionou praticamente todas as atividades que dependiam da determinação de
posições”. (p. 30).
Conforme Figueirêdo (2005), o Departamento de Defesa dos Estados Unidos
(DoD - Department of Defence) foi o responsável pela criação e lançamento do
primeiro sistema de posicionamento por satélite mais conhecido atualmente como
GPS, e esse projeto formou a constelação de satélites (Figura 1).
Esse é um sistema de posicionamento por satélites artificiais que proporciona
informações de tempo e posição tridimensional em qualquer instante e lugar do
planeta (FIGUEIRÊDO, 2005).

10
Figura 1 – Constelação de Satélites
Fonte: Google Imagens. Disponível em: https://goo.gl/6zzTXP. Acesso: 13 de Nov de 2017
Embora o sistema já estivesse sendo desenvolvido desde meados do fim dos
anos 70, só foi considerado totalmente operacional à partir de 1995. O seu
desenvolvimento custou aos cofres americanos uma quantia estimada na casa dos
10 bilhões de dólares e, embora este sistema tenha sido desenvolvido para o uso
exclusivo dos militares americanos, atualmente o mesmo é aberto para o uso civil,
sem nenhuma taxa adicional, mesmo que para uso extramilitar ou por qualquer país
(SANTOS, 2009).
A empresa Rockwell foi a responsável pela fabricação dos 28 satélites que
constituem o sistema. Cada satélite chega a atingir uma velocidade de 11265
quilômetros por hora (7000 milhas por hora), com essa velocidade completa duas
voltas por dia na órbita terrestre, e se localizam a uma altura de cerca de 20200
quilômetros (12600 milhas) e transmite sinais para os receptores que, por sua vez,
captam os sinais de no mínimo quatro satélites, os decodificam e informam as
respectivas posições (SANTOS, 2009).
A partir da criação do projeto NAVSTAR-GPS pelo Departamento de Defesa
dos Estados Unidos foram desenvolvidos outros sistemas por outras federações nos
quais podem ser citados GLONASS (Global Orbiting Navigation Satellite System)
desenvolvido pela antiga União Soviética, o Galileo pela União Europeia e o Beidou

11
também conhecido por Compass pela China. Desde então todos estes sistemas
veem sendo aperfeiçoados originando o GNSS (Global Navigation Satellite System).
O princípio do posicionamento utilizando o GNSS resume-se basicamente no
simples fato de medir a distância entre o receptor e os satélites, considerando que
para medir a distância o receptor posicionado em qualquer canto no globo terrestre
deve está captando sinal no mínimo de quatro satélites em orbita, essa distância
medida é obtida através do lançamento de ondas eletromagnéticas enviadas pelos
satélites (FIGUEIRÊDO, 2005).
Diante do avanço da tecnologia existem vários tipos GNSS, assim como
diversos método de posicionamentos e entre esses estão o posicionamento por
ponto, por ponto preciso e o relativo. Nesse trabalho será abordado o
posicionamento por ponto preciso (PPP).
Diante do que foi apresentado, tem-se como objetivo nesse trabalho observar
os sigmas das coordenas obtidos a partir de dois diferentes tempos de rastreio
utilizando a solução PPP on-line.
1.1 Justificativa
Cada vez mais tem se falado em inovações tecnológicas, que possibilitem
economia de tempo e dinheiro aliados à preocupação com resultados precisos.
Com a rápida e constante evolução das tecnologias, os GNSS têm sido cada
vez mais aplicados na Topografia. Infelizmente, em alguns casos, o entusiasmo pela
sua utilização, tem proporcionado trabalhos efetuados sem os cuidados requeridos,
precauções essas que podem afetar a acurácia e a precisão das coordenadas.
Essa situação deve ser modificada em função da conscientização dos
usuários, para a questão do tempo de aquisição dos pontos em campo, permitindo
assim aprimorar o produto final.
Para a Topografia, é de fundamental importância que os pontos levantados
em campo sejam de qualidade, uma vez que tais pontos serão utilizados como
referência para a execução de outros levantamentos e locações.

12
1.2 Objetivos
Este trabalho visa observa o sigma das coordenadas obtidas através de dois
tempos de rastreio (1h e 2h), para detectar se há diferença entre essas coordenadas
são extremamente grandes ao ponto comprometer a qualidade dos projetos na qual
as mesmas poderão ser aplicadas após a coleta.
1.2.1 Geral
Verificar o sigma de uma coordenada através do rastreio por aparelhos
GNSS, utilizando a solução “PPP on-line IBGE”.
1.2.2 Específicos
Realizar o rastreio da coordenada através do modo estático
Realizar o pós-processamento dos dados GNSS através do IBGE-PPP
Analisar os resultados do pós-processamento.
Constatar entre as observações qual rastreio disponibiliza a melhor qualidade.
1.3 Hipóteses
Diante do apresentado, a problemática desta pesquisa está focada na
seguinte questão, quais são os resultados e variações do sigma de uma coordenada
de um ponto processada através do IBGE-PPP.

13
2 CONSIDERAÇÕES GERAIS E REVISÃO TEÓRICA
Nesta fase, será apresentada uma revisão teórica abordando o sistema de
posicionamento, métodos de processamento de GNSS onde o Posicionamento por
Ponto Preciso é o foco, e também serão apresentados os aspectos relacionados
com o processamento dos dados.
2.1 O GNSS
Segundo Azambuja (2015) o GNSS foi criado em 1991 e atualmente refere-se
aos sistemas de posicionamento globais por satélites, tendo como principais
sistemas (Figura 2): o GPS (Global Positioning System), o GLONASS (GLObal’naya
NAvigatsionnaya Sputnikkovaya Sistema), o COMPASS/BeiDou (CNSS - Compass
Navigation Satelllite System) e o Galileo.
Figura 2 - Principais sistemas do GNSS
Fonte: Site TAB-TV. Disponível em: http://pt.tab-tv.com/?p=12962. Acesso: 13 de Nov de 2017
Enquanto o GPS é de responsabilidade do Departamento de Defesa dos
EUA, a Federação da Rússia é responsável pelo GLONASS, a União Europeia pelo
Galileo e a China é responsável pelo COMPASS/ BeiDou.

14
Em razão da alta acurácia proporcionada e do alto nível tecnológico, embutido
nos aparelhos receptores GPS, uma grande comunidade de usuários do sistema,
surgiu dos mais variados segmentos do meio civil, (navegação, posicionamento
geodésico, agricultura, meio ambiente, controle de frotas, etc.) (FIGUEIRÊDO,
2005).
Conforme Figueirêdo (2005), o princípio básico de navegação pelo GPS é
relativamente simples, consiste na medida das distâncias entre o receptor e o
satélite, que é calculada pelo tempo que a programação (sinal GPS), gerada no
satélite, leva para chegar até a antena receptora. Como o sinal viaja através da
atmosfera com a velocidade da luz, a distância é obtida pela multiplicação desta pelo
tempo que o sinal levou para chegar ao receptor.
2.2 Segmentos principais do GPS
Segundo Rocha (2003), o funcionamento do GPS é suportado por três
segmentos principais (Figura 3): o Segmento Espacial também designado segmento
aéreo ou subsistema de satélites, é constituído pela constelação dos 28 satélites
operacionais e toda a tecnologia de comunicação de dados a partir dos mesmos,
esses satélites obtêm energia a partir de painéis solares que são orientados
conforme o Sol. Com essas energias os mesmos são capazes de transmitir e captar
ondas eletromagnéticas que atravessam a atmosfera terrestre, fornecendo dados
referentes à posição e ao tempo; o Segmento de Controle, formado por um conjunto
de estações terrestres onde funciona toda a inteligência e controle do Sistema,
essas são responsáveis por enviar informações aos satélites para controlarem a sua
posição e velocidade, e são responsáveis por acertarem os seus relógios de forma
que o tempo marcado em ambos seja igual; e o Segmento de Usuários, constituído
pelos receptores GPS e todas as técnicas e processos, empregados pelos usuários
em suas aplicações.

15
Figura 3 - Segmentos Principais do GPS
Fonte: Adaptado site SlideShare. Disponível em: https://goo.gl/Q6RVF3. Acesso: 13 de Nov de 2017
2.3 Método de posicionamento
De acordo com o IBGE (2008) existem diferentes técnicas de posicionamento
nas quais resultam em diferentes precisões. Geralmente, o posicionamento é
efetuado a partir da onda portadora e/ou da pseudodistância. O IBGE (2008)
ressalta que:
Devido à precisão da medida da fase da onda portadora ser da ordem de milímetros, ela é a observável indispensável na obtenção de posicionamentos que requeiram melhor precisão. A pseudodistância é mais utilizada em posicionamentos com precisão de ordem métrica. (p. 6)
As técnicas de posicionamento existentes são: Posicionamento por Ponto
Simples, Por Ponto Preciso, Relativo, Relativo Estático, Relativo Estático-rápido,
Relativo Semi Cinemático e Relativo Cinemático.
2.3.1 Posicionamento por ponto simples ou posicionamento absoluto
Segundo Azambuja (2015) no início da utilização do sistema GPS, para se
obter o posicionamento de um ponto a forma mais comum era através da coleta da

16
pseudodistância, com isso cada observação coletada gerava uma equação que
quando eram devidamente ajustadas, forneciam as coordenadas da estação.
Para a realização desse método é necessário apenas um receptor e de no
mínimo quatro satélites visíveis simultaneamente conforme a (Figura 4), isto é
necessário tendo em vista que, há quatro parâmetros a serem determinados no
posicionamento, sendo três relacionados às coordenadas da estação (X, Y, Z) e um
relativo ao erro do relógio do receptor, mas para realização do ajuste, seriam
necessários cinco satélites visíveis simultaneamente no mínimo (Azambuja, 2015).
Figura 4 - Posicionamento Por Ponto
Fonte: Autoral (2017)
2.3.2 Posicionamento por ponto preciso
Hoje se utiliza bastante esse processo, pois é o método de posicionamento
GNSS em que se obtêm as coordenadas de um ponto utilizando apenas um receptor
e utiliza no pós-processamento efemérides precisas e correções dos relógios dos
satélites, possibilitando que a acurácia no posicionamento absoluto passe de metros
ao nível de poucos centímetros.
Conforme Azambuja (2015) o PPP é considerado como uma evolução do
processamento por ponto simples, e baseia-se em observações não diferenciadas,
utilizando as efemérides precisas das órbitas dos satélites.

17
Com a facilidade que a internet oferece, o serviço de PPP na forma on-line
passou a ser disponibilizado, aumentando assim o número de usuários desse
método. O serviço oferece ao usuário as estimativas de posições, no modo pós-
processamento das observações GNSS, utilizando o PPP, através da internet.
Conforme o Manual do Posicionamento por Ponto Preciso, publicado pelo
IBGE em abril de 2017 para isso ocorrer é necessário que as efemérides tenham
sido disponibilizadas na Internet pelo IGS (International GNSS Survey) / NRCAN
(Natural Resources of Canada), e essas correções recebem as seguintes
denominações: FINAL, RÁPIDA e ULTRARRÁPIDA.
No processamento dos dados, serão utilizados os produtos IGS quando os
dados coletados forem fora do território brasileiro, e usado às correções da NRCAN
quando os dados forem coletados no território brasileiro. Essas correções serão as
mais precisas disponíveis no momento que os dados forem submetidos ao PPP.
Mesmo esse procedimento sendo gratuito, ele é realizado com os mesmos
softwares computacionais empregados pela CSRS - Sistema de referência espacial
canadense, graças a uma parceria do Instituto Brasileiro de Geografia e Estatística
(IBGE) e o CSRS-PPP. O serviço PPP é disponibilizado no site do IBGE na
plataforma da geodesia.
Segundo as versões de Abril de 2017 do manual do usuário IBGE, não existe
tempo mínimo para se obter pontos com um GPS, no entanto quanto menor for o
tempo de rastreio, menor será a precisão determinada pelo processamento PPP. O
manual também afirma que a precisão do ponto está diretamente relacionada com o
tempo de rastreio, qualidade do rastreio, tipo de equipamento, entre outras. Quando
se processa pequenas observações de GPS, as coordenadas serão calculadas
usando somente as observações da pseudodistância (precisão métrica), onde a
mesma corresponde à diferença entre o tempo registrado no receptor no instante da
recepção do sinal, e o tempo registrado no satélite, no instante de transmissão do
sinal multiplicada pela velocidade da luz no vácuo, mas quando se processa
arquivos de rastreio com períodos de observações maiores, é possível resolver os
erros obtidos naquele rastreio usando-se as observações da fase da portadora,
tornando o posicionamento mais preciso (precisão centimétrica).
Limitante para o processamento utilizando o IBGE-PPP, não é o tempo de
rastreio do GNSS, mas sim o tamanho do arquivo obtido na observação. Para
18
processar um arquivo ou conjunto de arquivos o mesmo deve ter no máximo 20 Mb,
pois se for enviado um arquivo maior acarretara em um processamento mal
sucedido.
2.3.3 Posicionamento relativo
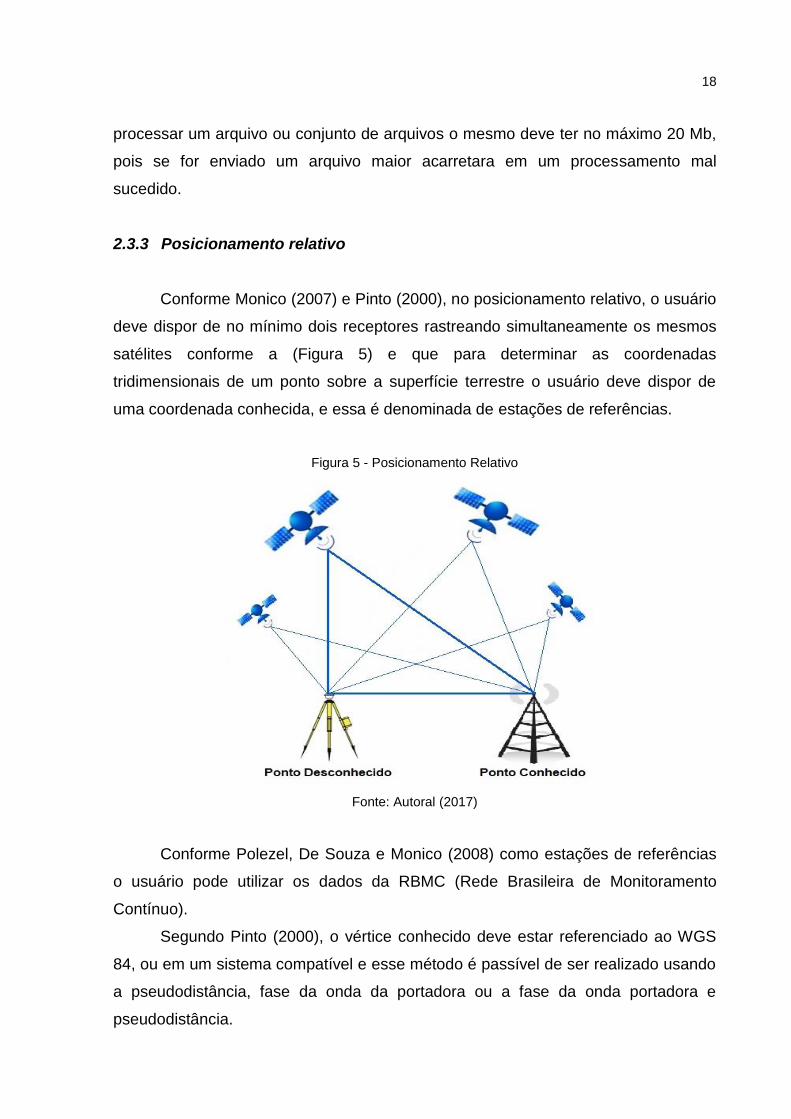
Conforme Monico (2007) e Pinto (2000), no posicionamento relativo, o usuário
deve dispor de no mínimo dois receptores rastreando simultaneamente os mesmos
satélites conforme a (Figura 5) e que para determinar as coordenadas
tridimensionais de um ponto sobre a superfície terrestre o usuário deve dispor de
uma coordenada conhecida, e essa é denominada de estações de referências.
Figura 5 - Posicionamento Relativo
Fonte: Autoral (2017)
Conforme Polezel, De Souza e Monico (2008) como estações de referências
o usuário pode utilizar os dados da RBMC (Rede Brasileira de Monitoramento
Contínuo).
Segundo Pinto (2000), o vértice conhecido deve estar referenciado ao WGS
84, ou em um sistema compatível e esse método é passível de ser realizado usando
a pseudodistância, fase da onda da portadora ou a fase da onda portadora e
pseudodistância.

19
2.3.3.1 Posicionamento relativo estático
Segundo o IBGE (2008), nesse posicionamento, os dois ou mais receptores
devem estar visualizando os mesmos satélites por um determinado tempo, que pode
variar de alguns minutos até algumas horas. Nesse período de coleta tanto o
receptor de referência, quanto o do vértice de interesse, permanecem estacionados
durante todo o levantamento. Em bases longas, é indispensável o uso de receptores
de dupla frequência quando se deseja alcançar uma boa acurácia (PINTO, 2000).
2.3.3.2 Posicionamento relativo estático rápido
Conforme o IBGE (2008) esse posicionamento também é conhecido como
pseudocinemático e esse método segue os mesmos fundamentos do
posicionamento estático. A diferença entre os dois é o tempo de ocupação da
estação, que nesse caso passa a ser inferior a 20 minutos e podem ser utilizar
receptores de simples ou dupla frequência.
Conforme Pinto (2000) durante a coleta dos dados a estação de referência
permanece fixa, enquanto outro GNSS percorre os pontos de interesse e nesse
deslocamento entre os pontos de interesse o receptor é desligado.
2.3.3.3 Posicionamento relativo semi cinemático
Conforme o IBGE (2008) esse posicionamento é também conhecido como
pseudoestático. E conforme essa nomenclatura, essa técnica pode ser entendida
como um estágio de passagem entre o estático-rápido e o cinemático.
Nesse método o receptor que ocupa o vértice de interesse permanece
estático, porém num tempo de ocupação bastante curto, necessitando coletar dados
no deslocamento entre um vértice de interesse e outro (IBGE 2008).
Segundo Pinto (2000) para obter melhor precisão não pode haver perda de
ciclo no período da coleta e se houver essa perda, o levantamento deve ser
reinicializado.

20
2.3.3.4 Posicionamento relativo cinemático
Conforme o IBGE (2008) nesse tipo de posicionamento a precisão dos dados
está na ordem de 1 a 10 ppm. Enquanto o receptor de referência fica estacionado no
vértice conhecido, o GNSS que está coletando os dados fica em movimento e a
cada instante grava uma observação.
2.4 Interferência de Sinal no GPS
Existe uma grande discussão em todo mundo referente às interferências que
afetam as observações do GPS, com isso os estudiosos João Francisco Galera
Monico e Carlos Renato Macedo De Sousa vem estudando sobre o caso.
Conforme o Monico (2008) as observações de GNSS estão sujeitas a erros
grosseiros, aleatórios e sistêmicos. Para ele durante o percurso da onda
eletromagnética entre o satélite e o receptor podem ocorrer interferências no sinal
ocasionando consequentemente erros de posicionamento.
Para Sousa (2005) a qualidade do sinal pode ser avaliada através da
chamada relação sinal-ruído (S/N), que pode ser definida como sendo a relação
entre a potência do sinal recebido do satélite e a potência de ruído que acompanha
o sinal. Onde o ruído nesse caso poderia ser provocado pelo receptor, em
decorrência do movimento de elétrons no circuito (ruído térmico), provocados por
fenômenos naturais ou por transmissores de sinais externos. Ressalta também que
as interferências podem ser divididas em dois blocos, as interferências intencionais e
as não intencionais.
As interferências intencionais são aquelas que mais preocupam, pois são
provenientes de transmissores de diversos tipos, projetados exclusivamente com o
propósito de causar danos ao sistema ou provocar alteração dos dados com o
objetivo de afetar a precisão do posicionamento. Já as interferências não
intencionais são relacionadas às fontes de erros sistêmicos e aos problemas
causados pelas transmissões de outros serviços, tais como TV via satélite, estações
de rádio FM, radioamadores, entre outros (SOUSA, 2005).
Sousa (2005) completa seu raciocínio indagando que no instante da
transmissão e recepção dos sinais dos satélites podem ocorrer interferências não

21
intencionais no percurso e que vem gerar erros sistemáticos. Erros esses que são
bastante preocupantes quando a observação requer uma maior precisão.
Dentro desses esclarecimentos sobre interferências pode-se citar um erro
bem comum em uma observação com GNSS, que é o multicaminhamento (Figura
6).
Figura 6 - Multicaminhamento
Fonte: Adaptado da Internet. Disponível em: https://goo.gl/wsZSLr. Acesso: 13 de Nov de 2017
O multicaminhamento é a reflexão dos sinais em uma ou mais superfícies
antes de atingir a antena do recepto. A refração de sinal pode ocorrer nos casos
aonde a onda eletromagnética venha a tocar em chapas metálicas, espelhos d’água,
veículos, entre outras fontes. Essa interferência está presente na maioria das coletas
de dados, com isso deve-se tomar o maior cuidado para evitar ao máximo essa
interferência (SOUSA, 2005).
2.5 Desvio Padrão (Sigma)
De acordo com o Manual do Usuário do Aplicativo Online IBGE-PPP Versão:
abril 2017 “Uma forma de avaliar a qualidade das coordenadas determinadas com o
IBGEPPP é verificar o sigma (ou desvio padrão) das coordenadas presentes [...] no
arquivo PDF” (p. 33).

22
O Manual do Usuário do Aplicativo Online IBGE-PPP Versão: abril 2017
afirma que o desvio padrão “[...] é usado para quantificar a dispersão em torno da
média das observações” (p. 33). Ele é a medida de precisão mais utilizada em
processamento de dados, e se torna um indicador muito otimista.
Conforme o Manual do Usuário do Aplicativo Online IBGE-PPP Versão: abril
2017.
O sigma é calculado considerando um intervalo de confiança de 95%, e representa a confiabilidade interna do processamento aqui chamado de precisão, para as componentes latitude, longitude e altitude. Uma outra forma para avaliar a qualidade das coordenadas é através das diferenças entre as coordenadas determinadas pelo IBGE-PPP com as coordenadas conhecidas do marco, permitindo assim uma análise da confiabilidade externa, denominada de acurácia. Em processos de medição, faz-se importante quantificar a sua qualidade. Por exemplo, se uma coordenada foi determinada através de levantamentos GNSS, torna-se necessário avaliar e determinar o seu grau de confiabilidade. Vários termos são usados para quantificar a qualidade das coordenadas, sendo os termos mais comuns a precisão e a acurácia. A acurácia se refere à proximidade de uma estimativa ou observação está do seu valor verdadeiro, mas desconhecido, estando vinculada aos erros aleatórios e sistemáticos. Já a precisão se refere à proximidade de uma estimativa ou observação está da sua média, estando vinculada apenas aos erros aleatórios. (2017, p. 33)
2.6 Sistema de Referência
De acordo com Pereira, Lobianco e Costa (2004) por conta dos atuais níveis
de precisão obtidos no posicionamento geodésico tornou-se obrigatório à adoção de
um sistema de referência que forneça uma referência em nível global e que
permitam a consideração da variação temporal das coordenadas de acordo com a
dinâmica terrestre.
Segundo Fortes (2000) com o objetivo de se compatibilizar os sistemas
geodésicos utilizados pelos países da América do Sul, foi criado na Conferência
Internacional, realizada em Assunção no Paraguai em 1993 o projeto SIRGAS
(Sistema de Referência Geocêntrico para as AméricaS) foi elaborado com vistas a
promover um referencial único compatível em termos de precisão com a tecnologia
atual (GPS) e em Setembro de 1997 os primeiros resultados do projeto foram
divulgados. Essa divulgação ocorreu na Assembleia Científica da Associação
Internacional de Geodésia - IAG, realizada no Rio de Janeiro.

23
Conforme Fortes (2000), na campanha SIRGAS2000 incluiu a ocupação das
estações maregráficas que definem o referencial altimétrico em cada país. Além
destas estações, foram observadas as estações altimétricas próximas às fronteiras
entre os países, bem como aquelas que participaram da campanha de 1995. O
período de observação foi de 10 a 19 de maio de 2000. Estima-se que foram
aproximadamente 170 estações ocupadas durante a campanha SIRGAS.
Hoje após a consolidação do SIGAS2000, o IBGE relata em pagina do seu
site (http://www.ibge.gov.br/home/geociencias/geodesia/pmrg/faq.shtm) a principal
importância de referência uma coordenada a uma época:
Com a grande evolução das técnicas de posicionamento geodésico observada nas últimas décadas, especialmente após o advento dos sistemas GNSS, pode-se dizer que a precisão de determinação de coordenadas melhorou em até três ordens de grandeza. Por exemplo, atualmente as coordenadas das estações da Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS (RBMC) são determinadas com precisão milimétrica. Com este nível de precisão, diversos fenômenos associados a movimentos da crosta terrestre, antes imperceptíveis, passam a ser claramente detectáveis. No caso do Brasil, o fenômeno que mais contribui para a alteração das coordenadas planimétricas (latitude e longitude) é o movimento da placa tectônica da América do Sul, responsável por um deslocamento de todo o território para noroeste em um pouco mais de 1 cm por ano. Esta variação anual evidenciou a necessidade de se associar uma época de referência às coordenadas de estações geodésicas determinadas com precisão milimétrica (ou centimétrica). No caso do sistema geodésico oficial do país, SIRGAS2000, escolheu-se 2000,4 para a época de referência, uma vez corresponder ao período da campanha SIRGAS realizada em 2000.

24
3 METODOLOGIA
O trabalho foi realizado baseado em pesquisas via internet, literaturas
especializadas, como artigos publicados em livros, teses, cartilhas, anais de
congresso, circulares e boletins técnicos, cadernos didáticos e coletas de dados em
campo.
Os pontos serão coletados no gramado da entrada principal do Campus
CRAJUBAR, Av Leão Sampaio (CE 835), número 107 – Lagoa Seca, Juazeiro do
Norte Ceará (Figura 7), com um GPS geodésico Hi-target V30 RTK (Figura 8), onde
o mesmo possui uma placa Trimble de 220 canais capaz de rastrear os sistemas:
GPS, Glonass, Galileo e Beidou.
Esse equipamento recebe as seguintes frequências GPS L1/Ca, L2E, L2C +
L5 / Glonass L1/Ca, L1P, L2C/A (Glonass M), L2P / SBAS L1/Ca e L5 / GioveA L1
BOC, E5A, E5B, E5AltBOC1/ GioveB L1 CBOC, E5A, E5B, E5AltBOC1
Comunicação RTK via Rádios UHF de última geração nos 2 receptores e GPRS
(chip de celular) para trabalhar em rede
Figura 7 - Entrada Principal da Urca
Fonte: Autoral (2017)

25
Figura 8 - GPS geodésico Hi-target V30 RTK
Fonte: Autoral
Após coletar os pontos em campo com o GNSS será gerado o arquivo RINEX
(extensão universal dos dados obtidos pelo GNSS), arquivo esse que pode ser
aberto em programas de processamento, com observações referentes a cada de
tempo de rastreio.
Com os dados RINEX em mão será utilizado, separadamente, o serviço
disponível pelo IBGE no seguinte link: http://www.ppp.ibge.gov.br/ppp.htm para o
processamento do arquivo. Estando na página do IBGE será fornecido o arquivo de
rastreio no formato RINEX, o valor da altura da antena, selecionar o modo do
levantamento (estático ou cinemático) e o modelo da antena e inserir o e-mail,
conforme apresentado na figura 9.
Após processado os dados do arquivo RINEX o IBGE-PPP disponibiliza os
resultados através de um link apresentado na tela de resposta do processamento.
Neste endereço encontra-se um arquivo compactado no formato ZIP. Neste diretório
são encontrados cinco arquivos (Figura 10), os quais possuem as seguintes
informações:

26
Figura 9 - Tela principal do serviço IBGE-PPP
Fonte IBGE. Disponível: http://www.ppp.ibge.gov.br/ppp.htm. Acesso 13 de Nov de 2017
Figura 10 - Arquivos disponibilizado pelo IBGE
Fonte: Autoral (2017)
1 - Arquivo KML para ser visualizado no Google Earth. Porém a posição do ponto
apresentado na imagem do Google Earth, pode não coincidir com a sua verdadeira
posição do ponto.

27
2 - Arquivo PDF é um relatório resumido dos resultados do processamento estático,
onde as principais informações são as coordenadas do processamento na época do
levantamento e as reduzidas à época 2000.4, os desvios padrão das coordenadas
(sigma) e a ondulação geoidal. Esse relatório só é gerado para processamento no
modo estático.
3 - O arquivo de extensão POS possui a estimativa das coordenadas época a época,
ao longo do tempo de rastreio. Esse arquivo é o mais importante para um
processamento no modo cinemático.
4 - O arquivo de extensão SUM possui informações detalhadas do resultado do
processamento. As informações contidas nessa saída são as informações utilizadas
no processamento dos dados.
5 - Arquivo Leiame.txt informa o conteúdo de cada arquivo de saída do
processamento.
As coordenadas disponibilizadas no cálculo do PPP estão nos sistemas de
referência, ITRF (International Terrestrial Reference Frame) e SIRGAS2000
(Sistema de Referência Geocêntrico para as Américas).
3.1 Coleta dos Dados
Para realizar a coleta dos dados do GNSS geodésico Hi-target V30 RTK foi
instalado conforme a norma de execução de levantamento topográfico – NBR13133,
assim tomando todos cuidados preventivos.
A primeira coleta de dados foi realizada na noite do dia 09 de Agosto de 2017,
onde foi instalado a 1ª base no campos da URCA (figura 11), exatamente às 21
horas e 10 minutos. Disponibilizando assim o arquivo de dados chamado RINEX
para o primeiro processamento utilizando IBGE-PPP.

28
Figura 11 - Base de 1 hora
Fonte: Autoral (2017)
A base foi nivelada (Figura 12) no centro de uma estaca de concreto (Figura
13) que já se encontrava fixada no gramado da entrada principal. O GPS ficou a
exatos 1,57m de altura em relação ao centro da estaca.
Figura 12 - Nivelamento da Base
Fonte: Autoral (2017)

29
Figura 13 - Estaca de Concreto
Fonte: Autoral (2017)
O GPS foi programado com uma máscara de elevação de 10 graus, isso
significa que qualquer satélite que estiver ao horizonte a partir do ponto de vista do
GPS não será visualizado, evitando assim alguns possíveis erros nos cálculos da
latitude, longitude e altitude.
O GPS também foi programado para coletar a cada 1 segundo um sinal
emitido pelos satélites, com isso a média que é feita pelo GPS para calcular o ponto
é mais próxima da verdadeira.
Alguns dias depois foi realizada a coleta da segunda base (Figura 14). O
procedimento foi realizado exatamente no dia 23 de Agosto de 2017, às 18 horas e
50 minutos, no mesmo local da primeira, aonde veio a disponibilizar os dados RINEX
para o segundo processamento utilizando IBGE-PPP.

30
Figura 14 - Base de 2 horas
Fonte: Autoral (2017)
A segunda base foi nivelada novamente no centro da estaca de concreto, pois
o intuito desse trabalho é observar o sigma de duas coletas de dados no mesmo
ponto, mas com o tempo de rastreio diferente.
O equipamento ficou a exatos 1,75m de altura em relação ao centro da
estaca. O mesmo foi programado com uma máscara de elevação de 10 graus, e
com o intervalo de coletar a cada 1 segundo, repetindo assim o mesmo cenário
proporcionado para a primeira coleta.
Nas duas coletas foi possível verificar que o ponto onde foi escolhido para a
realização desse estudo não era um dos melhores locais para utilizar um GPS, pois
no local existiam objetos que podem vim a prejudicar a precisão e acurácia do ponto
coletado (figura 15), tais como arvores rede de transmissão elétrica e a própria
entidade (URCA), gerando assim o efeito do multicaminhamento, ou seja, a reflexão
dos sinais, este é um problema enfrentado frequentemente em coletas de dados
devido à proximidade de objetos e/ou estruturas, interferindo na qualidade do
levantamento. Conforme SOUSA (2005) tal cenário descrito acima, estaria engajado
como uma interferência não intencional, gerando assim erros sistêmicos.

31
Figura 15 - Interferências no Local da Base
Fonte: Autoral (2017)
3.2 Processamento dos Dados
De posse dos dois arquivos RINEX foi dado início então o processamento
desses dados utilizando o IBGE-PPP.
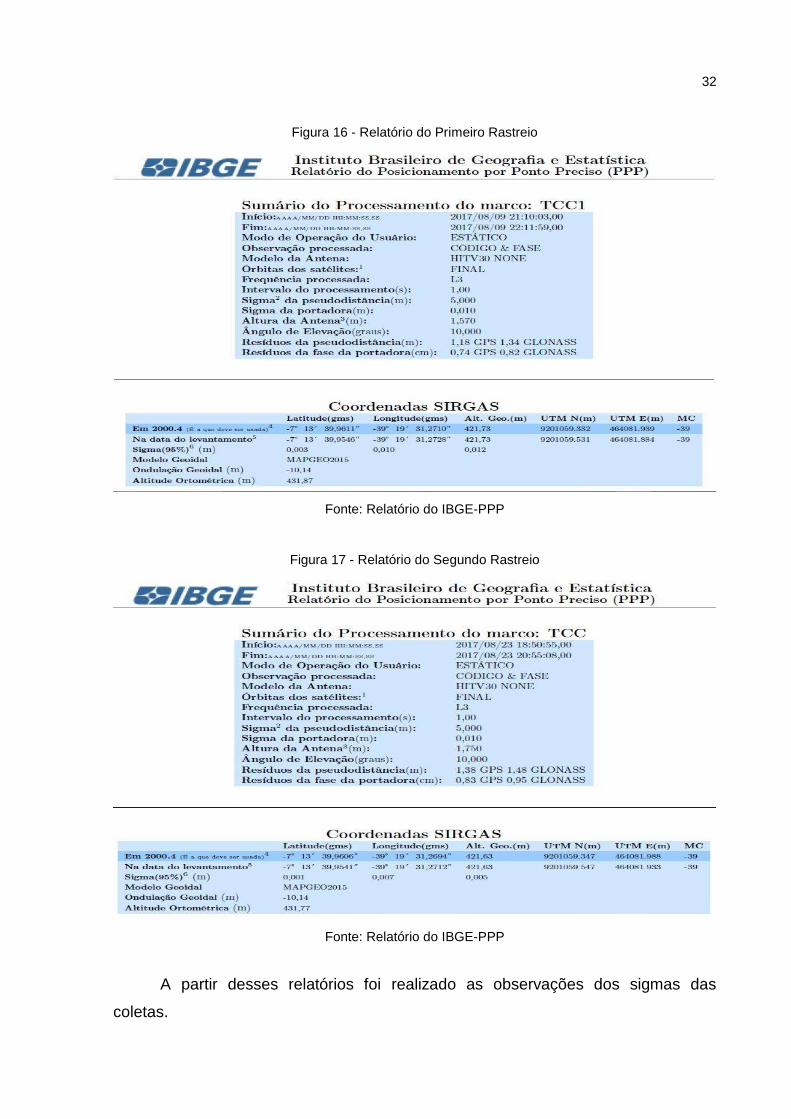
Os dois arquivos foram submetidos ao processamento no dia 02/11/017
gerando assim um relatório do primeiro rastreio (Figura 16) e outro do segundo
(Figura 17). Com isso o processamento PPP realizou as correções cabíveis nas
orbitas e relógios anatômicos dos satélites, proporcionando uma coordenada mais
precisa.
A plataforma de processamento do IBGE-PPP utilizou as correções da
NRCAN, pois como já foi mencionado para processamento de dados em território
brasileiro se utiliza os dados dessa agência.
Nos resultados as coordenadas foram dadas no sistema de referência atual
do nosso continente que é o SIRGAS2000.
32
Figura 16 - Relatório do Primeiro Rastreio
Fonte: Relatório do IBGE-PPP
Figura 17 - Relatório do Segundo Rastreio
Fonte: Relatório do IBGE-PPP
A partir desses relatórios foi realizado as observações dos sigmas das
coletas.

33
4 RESULTADOS E DISCUSSÕES
Com os relatórios do processamento foi possível gerar a tabela 1 onde na
mesma consta as coordenadas Elipsoidal e UTM para latitude, longitude e altura
geoidal e seus respectivos sigmas.
Tabela 1 - Coordenadas e sigmas do processamento.
Tempo de Observação Coordenadas Elipsoidais Coordenadas UTM Sigma
1 Hora
Latitude = -7° 13´ 39,9611'' N = 9201059.332 0,003
Longitude = -39° 19´ 31,2710'' E = 464081.939 0,01
Alt. Geo = 421,73 MC = -39 0,012
2 Horas
Latitude = -7° 13´ 39,9606'' N = 9201059.347 0,001
Longitude = -39° 19´ 31,2694'' E = 464081.988 0,007
Alt. Geo = 421,63 MC = -39 0,005
Fonte: Autoral (2017)
Observando a tabela 1 nota-se que a diferença nas coordenadas entre os
dois tempos de rastreio é mínima. Mas em contrapartida percebe-se que a precisão
melhora com o tempo, ou seja, quanto maior o tempo, menor o sigma, confirmando
assim o que relata o manual do usuário IBGE, que a precisão está diretamente
relacionada com o tempo de rastreio.
O sigma é calculado considerando um intervalo de confiança de 95%, e
representa a confiabilidade interna do processamento dos componentes de latitude,
longitude e altitude na qual essa credibilidade é chamada de precisão.
No entanto analisando os resultados em cima das bases de tempos utilizados
nas coletas e também considerando as interferências mencionadas no corpo do
trabalho e classificadas segundo Sousa (2005) como uma interferência não
intencional, gerando assim possíveis erros sistêmicos, essas diferenças nos sigmas
são bastante pequenas, se tornado quase irrelevante na qualidade do produto final.
No gráfico 1 abaixo é possível constatar claramente que a diferença dos
sigmas não passou da casa de centímetros.

34
Gráfico 1 - Diferença dos Sigmas
Fonte: Autoral (2017)
Verificando o gráfico nota-se que a redução na latitude e longitude foi de
0,002m e 0,003m respectivamente, e isso é equivalente a 0,2cm e 0,3cm já a altura
geoidal teve uma variação um pouco maior, o sigma da mesma apresentou uma
diminuição de 0,007m, o equivalente a 0,7cm.
Com base nos dados do gráfico 1, foi gerado o gráfico 2 onde o mesmo
contempla o percentual da redução dos três sigmas. Nesse gráfico é possível
constatar que as maiores diferenças se deram nos sigmas da Latitude e Altura
Geoidal.
Gráfico 2 - Porcentagem de Redução dos Sigmas
Fonte: Autoral (2017)
0
0,002
0,004
0,006
0,008
0,01
0,012
0,014
Latitude Longitude Alt. Geo
0,003
0,010
0,012
0,001
0,007
0,005
0,0020,003
0,007
Metr
os
Sigma em 1 Hora Sigma em 2 Horas Redução do Sigma
-
20,00
40,00
60,00
80,00
100,00
Latitude Longitude Alt. Geo
66,67 %
30%
58,33%

35
Conforme o gráfico acima está evidente que houve uma variação nos sigmas
obtidos nas duas coletas e essa alteração foi bem considerável, pois a diferença
obtida nos dois intervalos de tempo para a Latitude e Altura Geoidal foi mais da
metade em relação ao rastreio de 1 hora.
O IBGE-PPP traz em seus relatórios conforme a figura 18 uma indicação de
precisão esperada para dois tipos de equipamentos e alguns tempos de coletas para
o levantamento estático que foi o caso desse trabalho.
Figura 18 - Precisão Esperada para um Levantamento Estático.
Fonte: Relatório do IBGE-PPP
Observando o esperado pelo IBGE-PPP e verificando os gráficos 3 e 4 é
possível constatar que a variação nos sigmas está dentro do aceitável para a
questão de qualidade dos pontos, pois para realizar a coleta foi utilizado um GNSS
de duas frequências e esse equipamento é um dos tipos de receptores mencionados
e similarmente foi utilizado dois dos tempos estipulados no relatório.
Gráfico 3 - Sigma em 1 Hora x Esperado Pelo IBGE-PPP
Fonte: Autoral (2017)
0,003
0,010 0,012
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
0,045
Latitude Longitude Alt. Geo
Metr
os
Sigma em 1 Hora Esperado pelo IBGE

36
Gráfico 4 - Sigma em 2 Horas x Esperado Pelo IBGE-PPP
Fonte: Autoral (2017)
Vale ressaltar que a precisão obtida pelo PPP-IBGE não está relacionada
somente com tempo, mas também com o modo de processamento (estático ou
cinemático) e com o tipo de receptor (L1 ou L1/L2).
Entre os dois tempos utilizados notou-se que a coleta realizada com 2 horas
teve um melhor resultado na questão de qualidade, mas isso não implica informa
que a coleta de 1 horas seja insatisfatória, pois como foi visto anteriormente a
mesma está dentro do aceitável para o IBGE.
Procurou-se com esse trabalho observa o sigma das coordenadas obtidas
através dos dois rastreios realizados no campos da URCA, utilizando a solução PPP
online para processamento dos dados do GNSS. Embora o PPP tenha acesso
apenas ao que já foi executado, esse procedimento vem se popularizando cada vez
mais, e desponta como uma grande ferramenta para aplicações topográficas.
No processamento dos dados utilizando o serviço PPP on-line, os resultados
se mostraram de um modo geral nos relatórios bastante satisfatórios para os
intervalos de tempo utilizados.
0,001
0,0070,005
0,017 0,017 0,018
0
0,003
0,006
0,009
0,012
0,015
0,018
0,021
Latitude Longitude Alt. Geo
Metr
os
Sigma em 2 Horas Esperado pelo IBGE

37
5 CONCLUSÃO
A coleta de dados foi realizada através do modo estático. Foi utilizado o
IBGE-PPP para realizar o pós-processamento das coordenadas do receptor GNSS,
e resultou em dados corrigidos e ajustados. Diante deste processo prático e dos
resultados alcançados constatou-se através dos relatórios que houve uma variação
que, entre os dois tempos de coleta, comportou-se da forma que foi relatado no
corpo do trabalho: que o desvio padrão está relacionado com o tempo de
observação.
Conforme a constatação feita foi possível observar que, à medida que
aumenta o tempo de coleta dos dados, o sigma diminui e com isso fica evidente que
para os dois tempos utilizados o que disponibilizou melhor qualidade foi a de 2
horas.
Concluiu-se também que os intervalos de tempo utilizados e as possíveis
interferências contidas no local não tiveram influências significativas no resultado da
qualidade dos pontos obtidos já que os dois desvios padrões ficaram dentro do
esperado pelo IBGE.
De acordo com os objetivos que foram determinados obteve-se êxito!
Conseguiu-se com a etapa prática contemplar tudo que foi almejado, pois a partir
dela foi possível coletar os dados necessários para realizar o pós-processamento
utilizando a plataforma do IBGE-PPP e em seguida realizou-se a análise dos
resultados obtidos, finalizando todo o processo de verificação da variação no sigma
das coordenadas.
Recomenda-se para trabalhos futuros, a comparação do desvio padrão entre
os modos de rastreio (estático e cinemático), identificando assim se a diferença do
modo de coleta pode ter uma influência considerável na qualidade dos resultados,
quando se utiliza a solução PPP on-line.

38
REFERÊNCIAS BIBLIOGRÁFICAS
AZAMBUJA, J.L.F. Posicionamento por ponto preciso em aplicações geodésicas: uma análise envolvendo longo período de dados das estações da RBMC. 2015. Tese (Doutorado em Sensoriamento Remoto) - Universidade Federal do Rio Grande do Sul. Disponível em: https://www.lume.ufrgs.br/bitstream/handle/10183/130562/000978811.pdf?sequence=1. Acesso: 25 de Agosto de 2016. FIGUEIRÊDO, D.C. Curso Básico de GPS. 2005. Disponível em: http://www.seivamt.com.br/anexo_artigos/21.pdf. Acesso: 10 de Outubro de 2016. FORTES, L. P. S. SIRGAS: O Sistema de Referência para o novo milênio. I Seminário Sobre Referencial Geocêntrico No Brasil, 2000. Disponível em: https://ww2.ibge.gov.br/home/geociencias/geodesia/pmrg/Historico/seminario_2000/SEMINARIO_2000_SIRGAS_D.pdf. Acesso: 08 de Junho de 2017. IBGE (INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA). Recomendações Para Levantamentos Relativos Estáticos – GPS. abril de 2008. Disponível em: http://www.inde.gov.br/images/inde/recom_gps_internet.pdf. Acesso: 15 de Dezembro 2017 IBGE (INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA). Manual do Usuário Aplicativo Online IBGE-PPP Versão: abril 2017. Diretoria de Geociências. Coordenação de Geodésia. Disponível em: https://www.ibge.gov.br/home/geociencias/geodesia/ppp/manual_ppp.pdf. Acesso: 22 de Agosto 2017. MONICO, J.F.G. Posicionamento pelo GNSS – Descrição, fundamentos e aplicações. 2.ed. São Paulo: Editora UNESP, 2008. MONICO, J.F.G. Posicionamento pelo GNSS: descrição, fundamentos e aplicações. Editora UNESP, 2007. PEREIRA, K. D; LOBIANCO, M. C. B; COSTA, S. M. A. Mudança Do Referencial Geodésico No Brasil. Anais - II Simpósio Regional de Geoprocessamento e Sensoriamento Remoto. Aracaju/SE, 10 a 12 de novembro de 2004. Disponível em: https://www.researchgate.net/publication/228450966_Mudanca_do_Referencial_Geodesico_no_Brasil. Acesso: 08 de Dezembro de 2017

39
PINTO, J. R. M. Potencialidade do uso do GPS em obras de Engenharia. 2000. Tese de Doutorado. Dissertação (mestrado). UNESP, Faculdade de Ciências e Tecnologia, Presidente Prudente, 2000. Disponível em: http://www2.fct.unesp.br/pos/cartografia/docs/teses/d_pinto_jrm.pdf. Acesso: 12 de Dezembro de 2017. POLEZEL, W. G. C; DE SOUZA, E. M; MONICO, J. F. G. Método de posicionamento relativo por satélite GPS com correção do efeito do multicaminho em estações de referência: formulação matemática, resultados e análises. Tendências em Matemática Aplicada e Computacional, v. 9, n. 1, p. 133-142, 2008. ROCHA, J.A.M.R. GPS: Uma Abordagem Prática; 4.ed. Recife: Bagaço, 2003. 232p. SANTOS, K.E. Lógica Matemática Aplicada À Definição De Rotas Usando Dispositivos GPS. 2009. Disponível em: http://repositorio.pgsskroton.com.br/bitstream/123456789/1114/1/artigo%2030.pdf. Acesso: 25 de Agosto de 2017. SOUSA, C. R. M. Interferidores de GPS: Análise do sistema e de potenciais fontes de interferência. 2005. Tese de Doutorado. Instituto Militar de Engenharia.

40
ANEXOS
Anexo A - Relatório do rastreio de 1 hora
Fonte: Relatório do IBGE-PPP

41
Anexo B - Relatório do rastreio de 2 horas
Fonte: Relatório do IBGE-PPP







