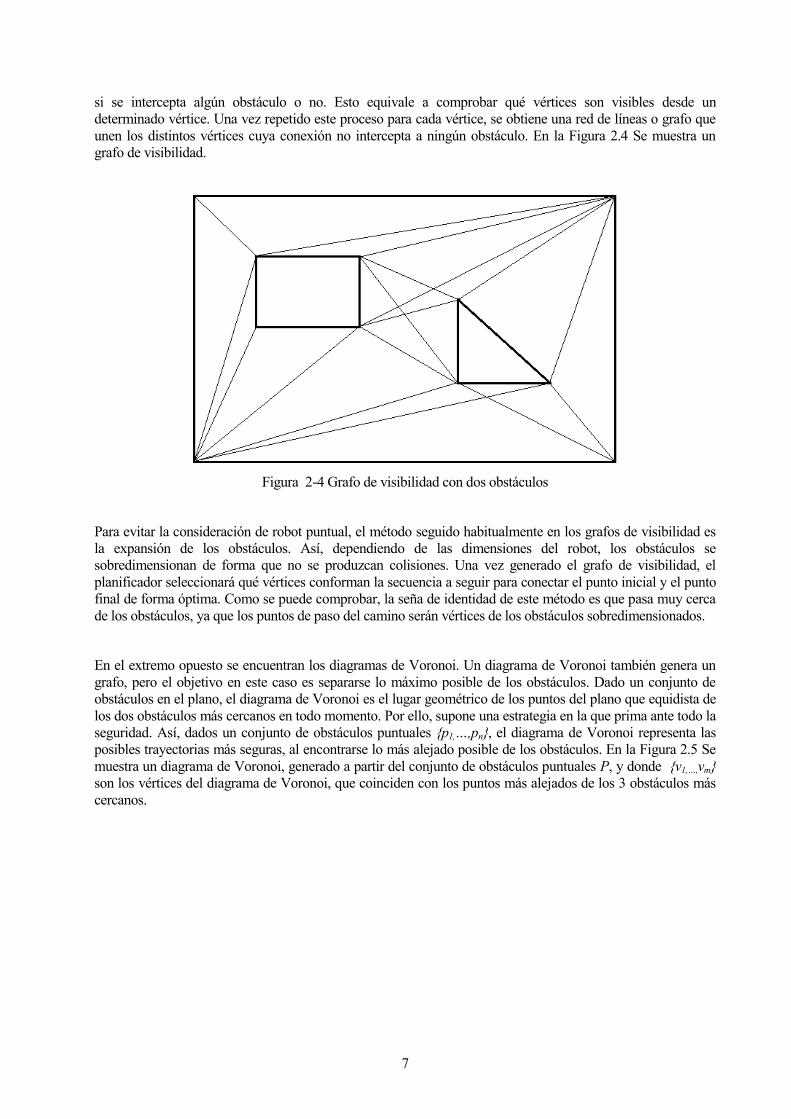
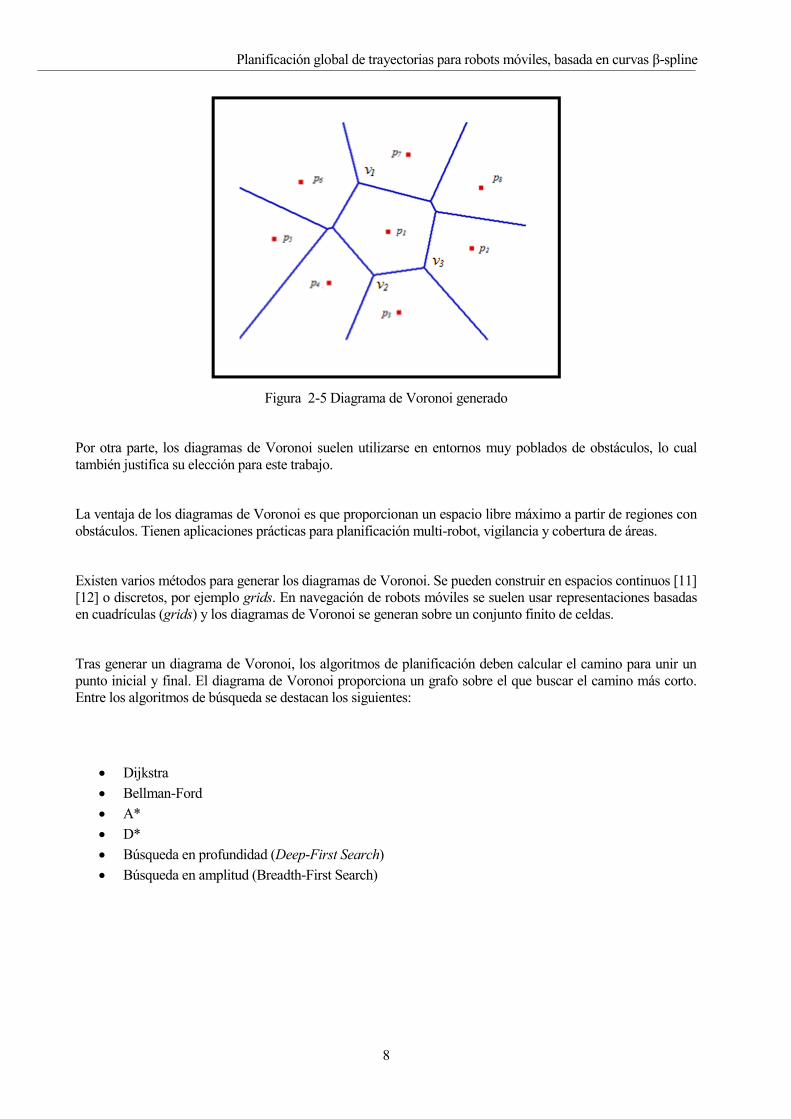
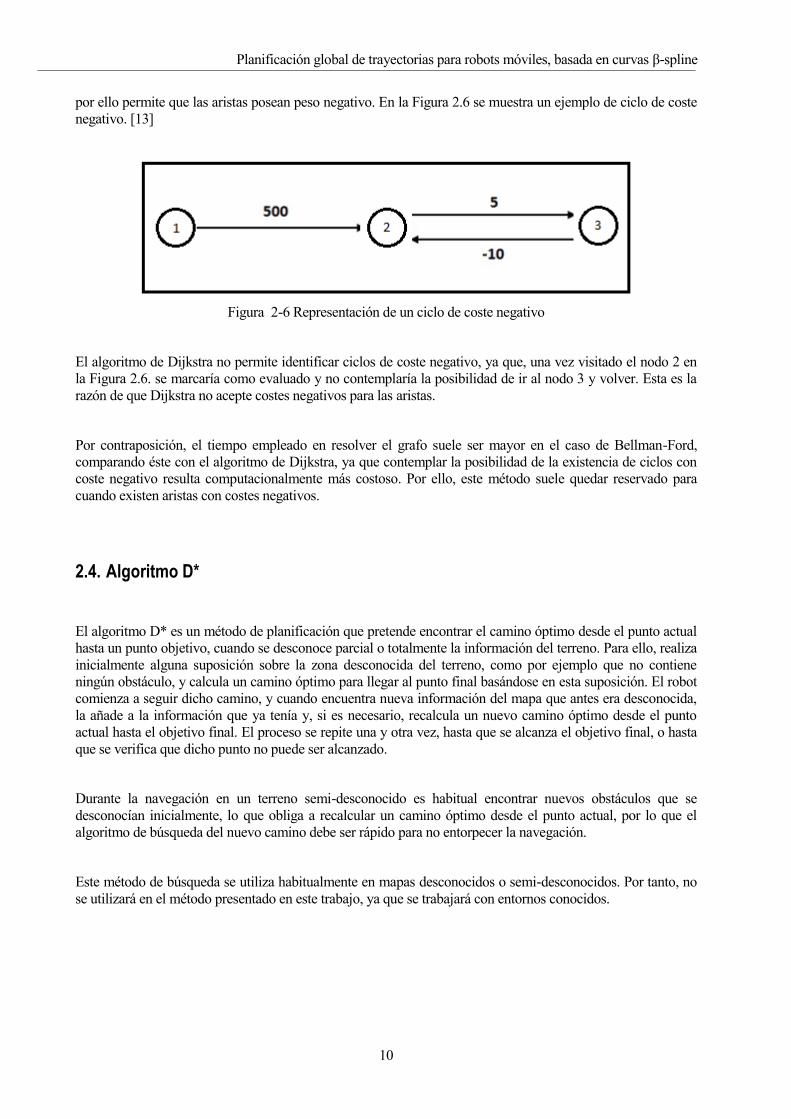
Trabajo Fin de Grado Grado en Ingeniería en Tecnologías Industriales Generación global de trayectorias para robots móviles, basada en curvas betaspline Autor: Alejandro Muñoz Cueva Tutores: Aníbal Ollero Baturone José Antonio Cobano Suárez Dep. Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingeniería Universidad de Sevilla Sevilla, 2014
Transcript
Trabajo Fin de Grado
Grado en Ingeniería en Tecnologías Industriales
Generación global de trayectorias para robots
móviles, basada en curvas betaspline
Autor: Alejandro Muñoz Cueva
Tutores: Aníbal Ollero Baturone
José Antonio Cobano Suárez
Dep. Ingeniería de Sistemas y Automática
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014
ii
iii
Trabajo Fin de Grado
Grado en Ingeniería en Tecnologías Industriales
Generación global de trayectorias para robots
móviles, basada en curvas betaspline
Autor:
Alejandro Muñoz Cueva
Tutores:
Aníbal Ollero Baturone
José Antonio Cobano Suárez
Dep. de Ingeniería de Sistemas y Automática
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014
Trabajo Fin de Grado: Generación global de trayectorias para robots móviles, basada en curvas betaspline
Autor: Alejandro Muñoz Cueva
Tutores: Aníbal Ollero Baturone
José Antonio Cobano Suárez
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2014
vi
El Secretario del Tribunal
i
Agradecimientos
A los tutores que me han orientado en la elaboración de este trabajo. A D. Aníbal Ollero por introducirme en el
ámbito de la robótica, así como darme la oportunidad de realizar este trabajo, y a D. José Antonio Cobano por
su continua ayuda y atención a lo largo de todo el tiempo invertido en el trabajo.
ii
Resumen
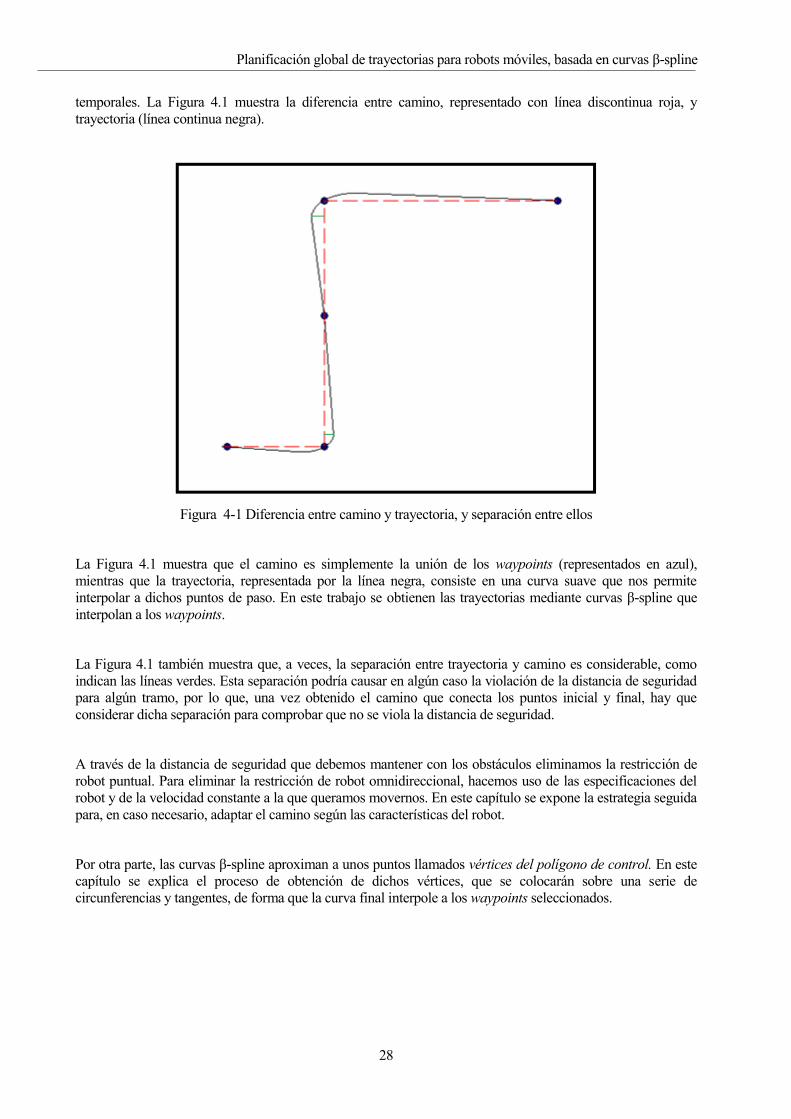
En este trabajo se presenta un método de planificación global de trayectorias en entornos de dos dimensiones,
conocidos y con obstáculos estáticos. El método busca combinar seguridad y flexibilidad, de forma que se
obtengan trayectorias seguras entre un punto inicial y otro punto final dados. Se pretende que el software
presentado sea capaz de calcular una trayectoria segura y realizable por un robot móvil cualquiera, a velocidad
constante, introduciendo una serie de parámetros que definan las características del mismo, y que se tendrán en
cuenta para calcular la trayectoria final. Para ello, el método integra el uso de los diagramas de Voronoi y el
suavizado mediante el uso de curvas β-spline.
iii
Índice
Agradecimientos i
Resumen ii
Índice iii
Índice de Figuras v
1 Introducción 1 1.1. Objetivo del trabajo 1 1.2. Estructura del trabajo 2
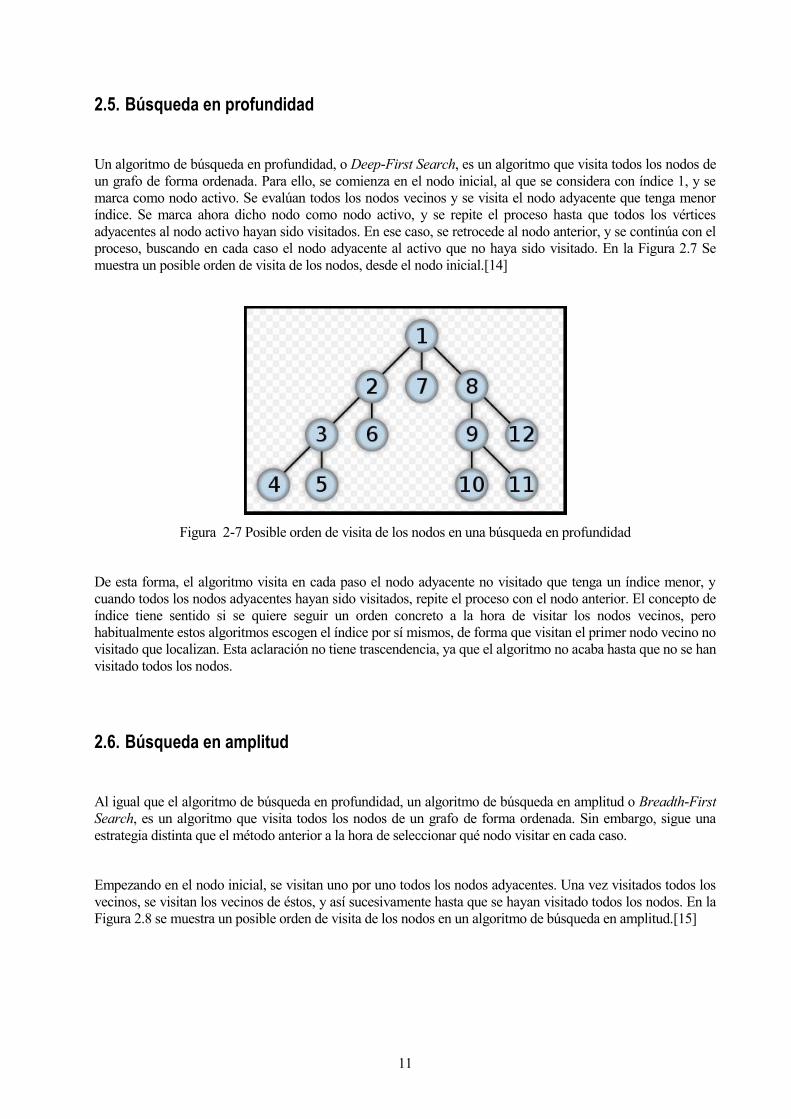
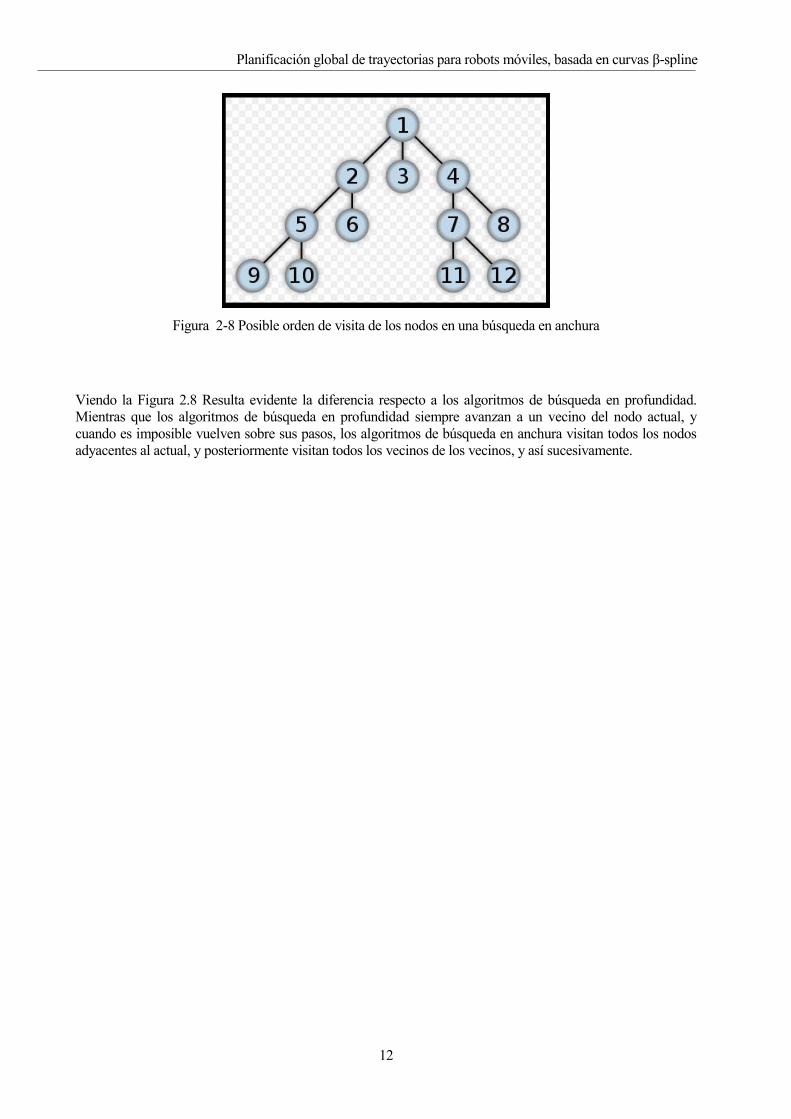
2 Estado del arte 5 2.1. Dijkstra 9 2.2. Algoritmo A* 9 2.3. Bellman-Ford 9 2.4. Algoritmo D* 10 2.5. Búsqueda en profundidad 11 2.6. Búsqueda en amplitud 11
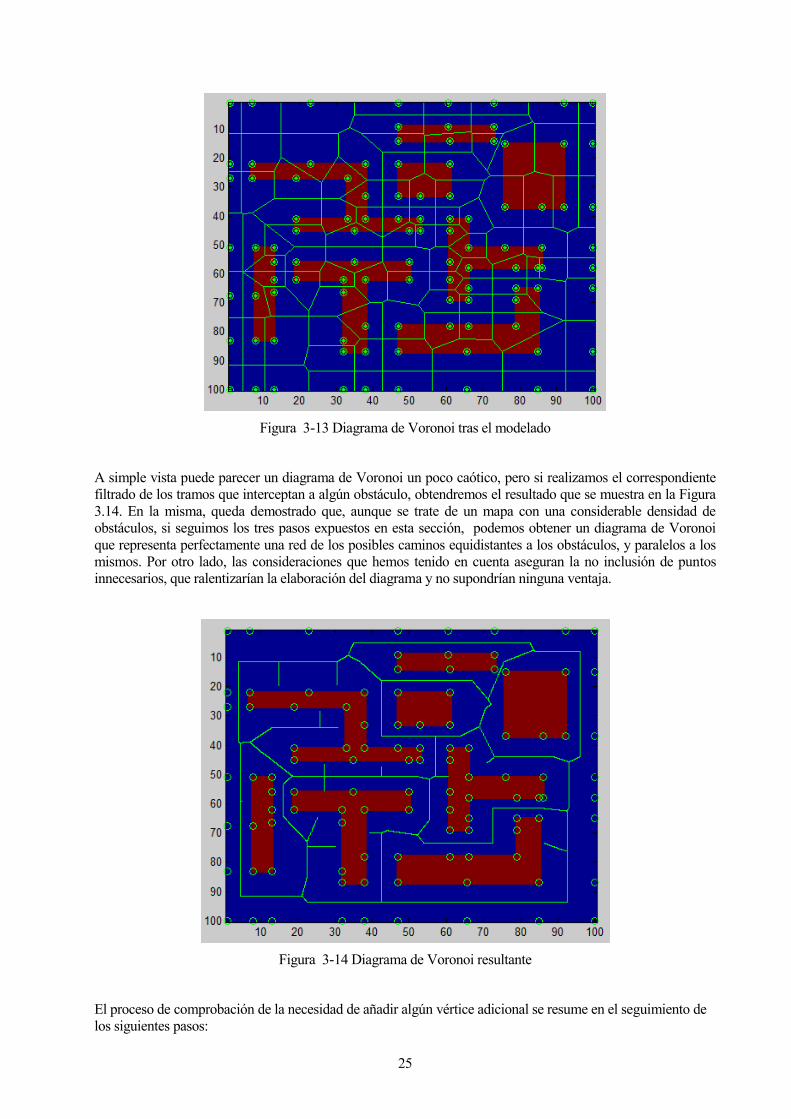
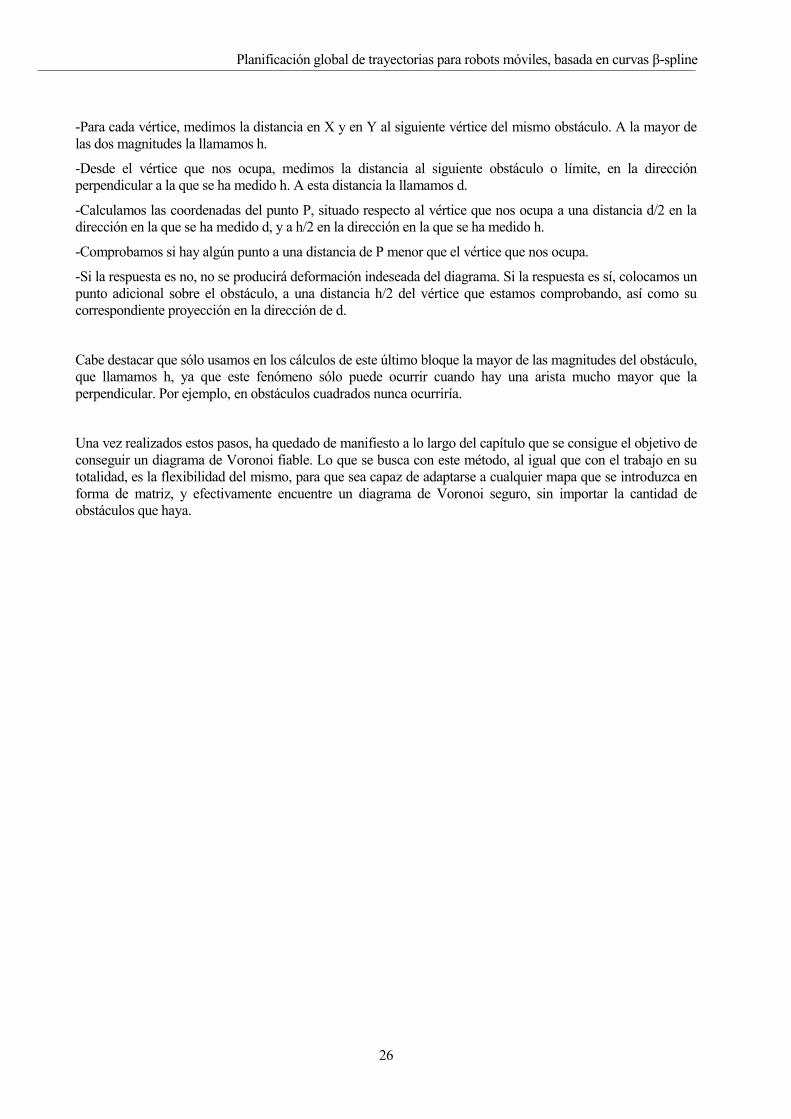
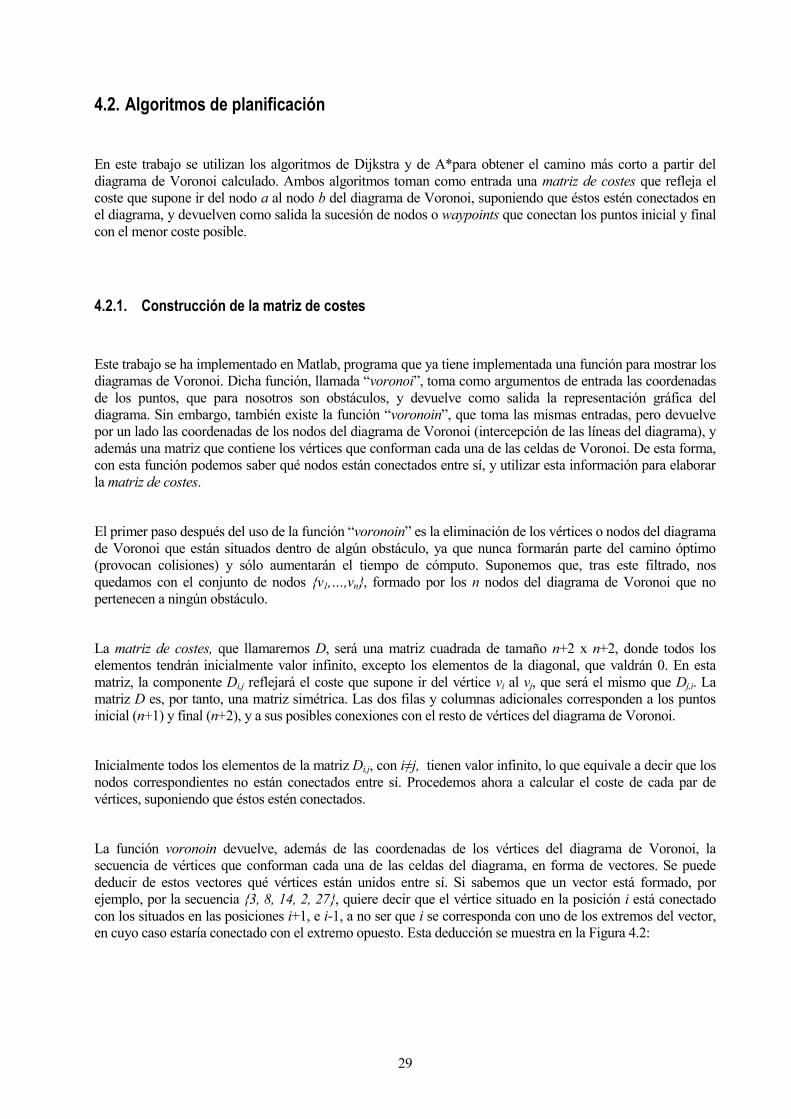
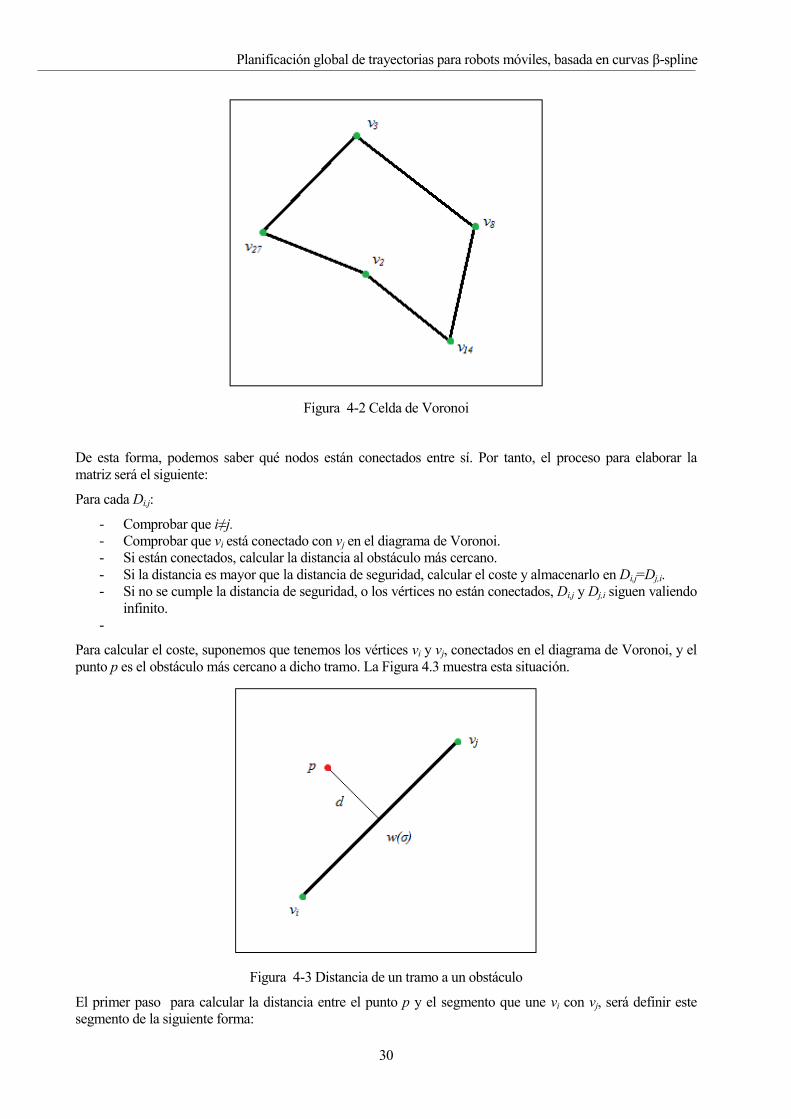
3 Diagramas de Voronoi y modelado de obstáculos 13 3.1. Introducción 13 3.2. Diagramas de Voronoi 14
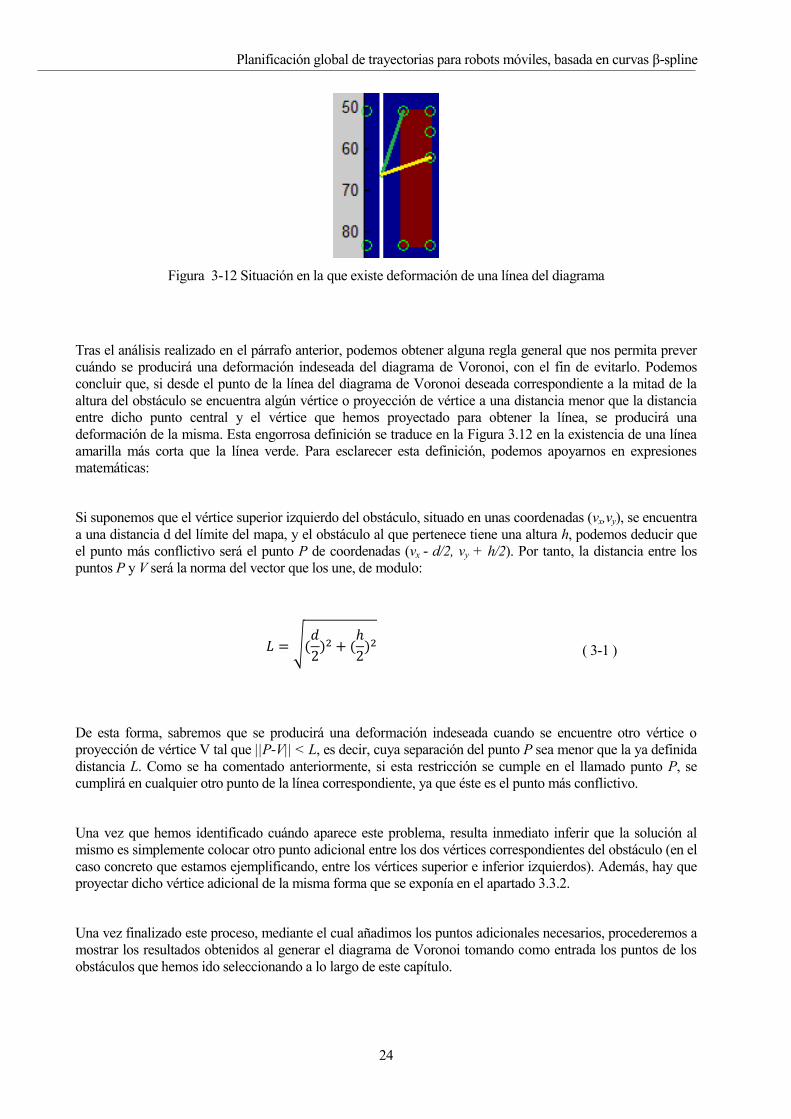
3.2.1. Construcción de un diagrama de Voronoi 14 3.2.2. Problemas al crear el diagrama de Voronoi 15
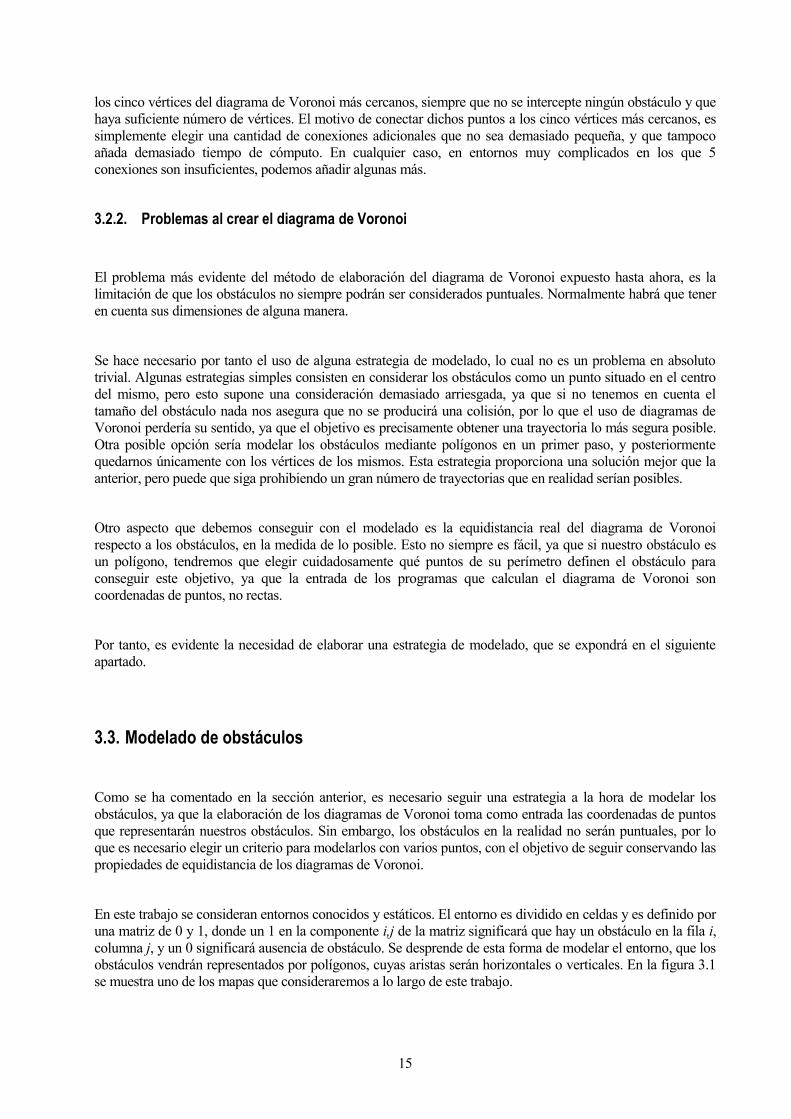
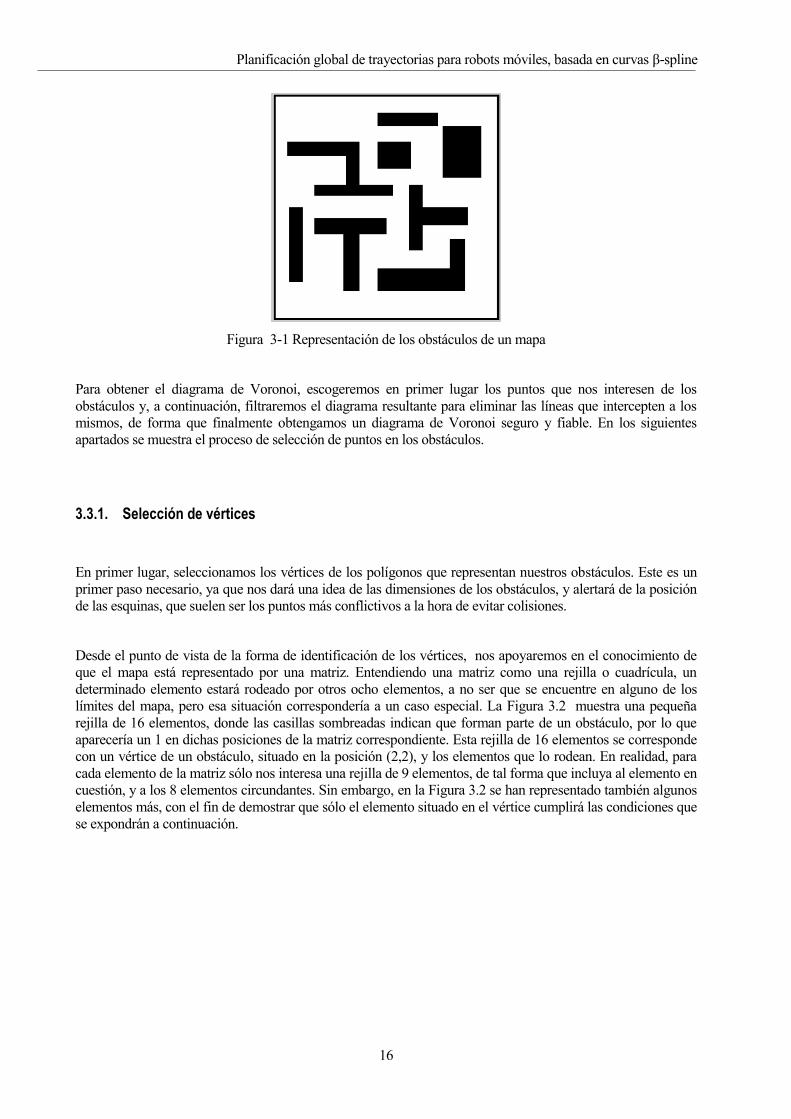
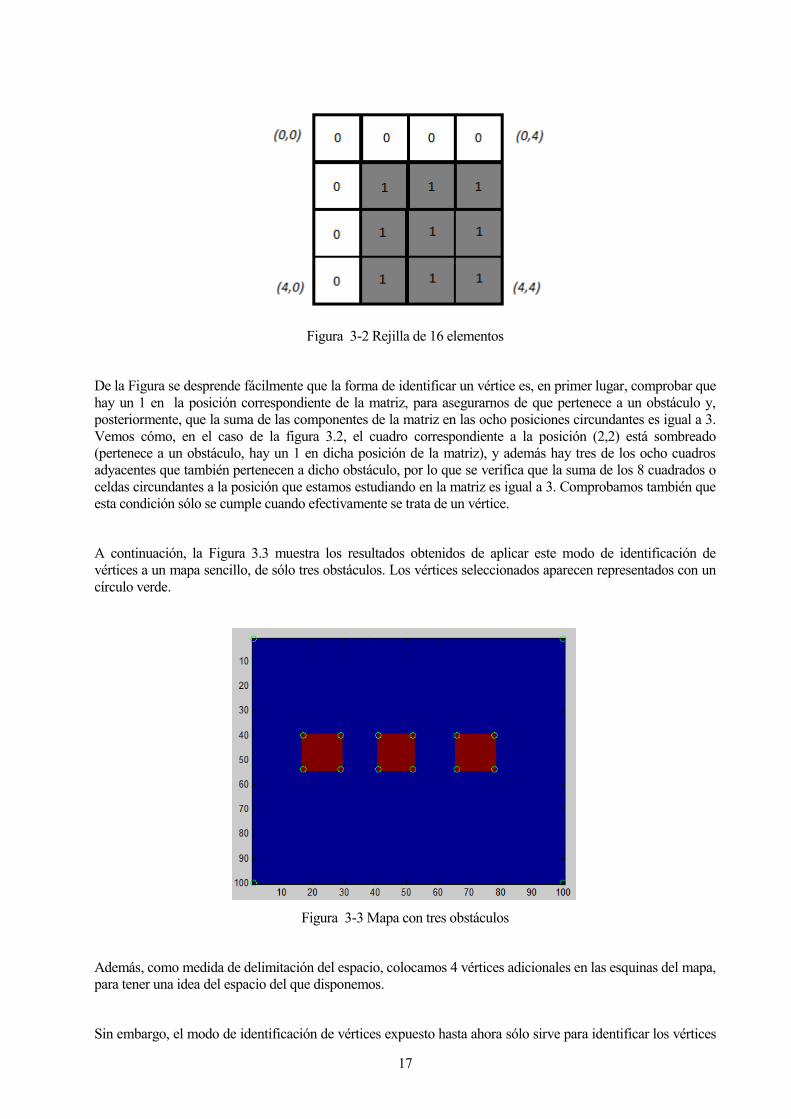
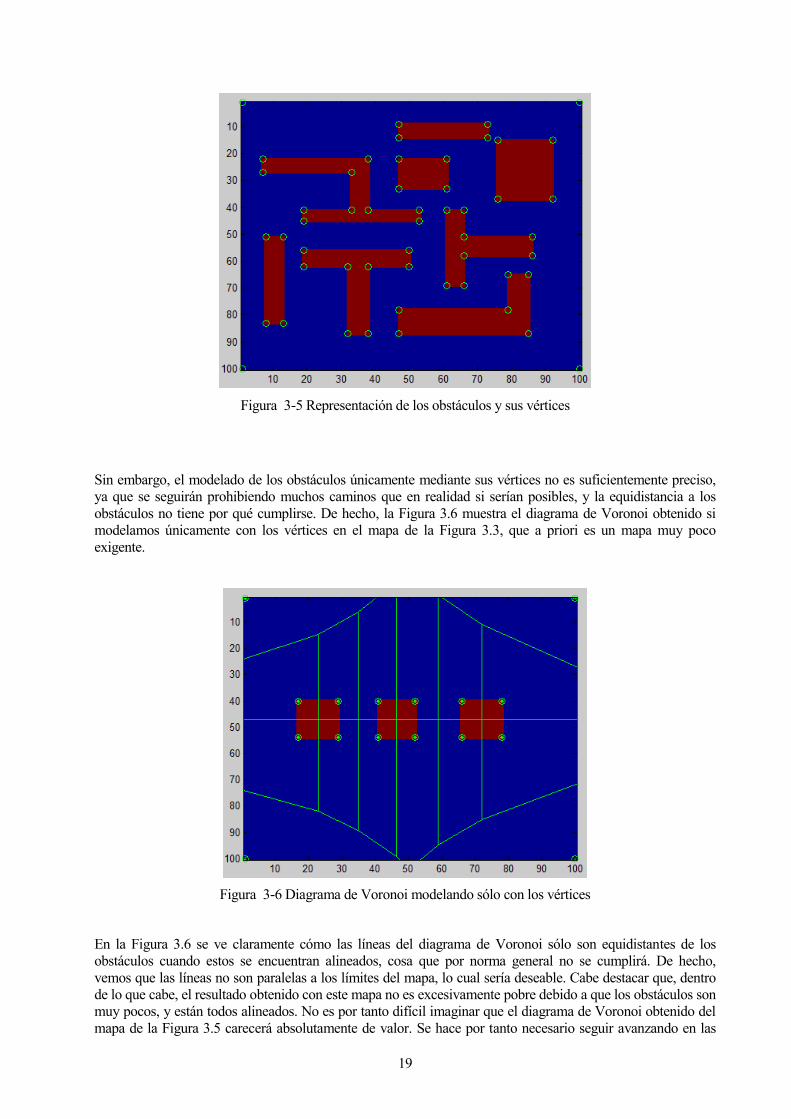
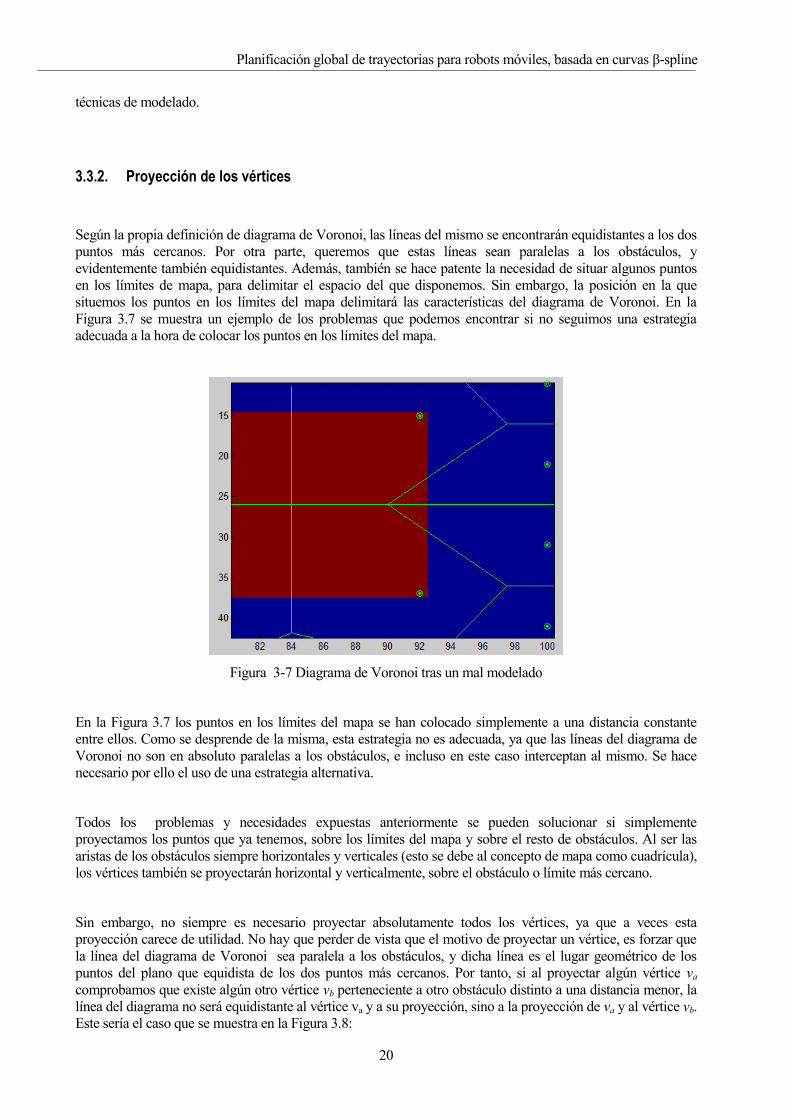
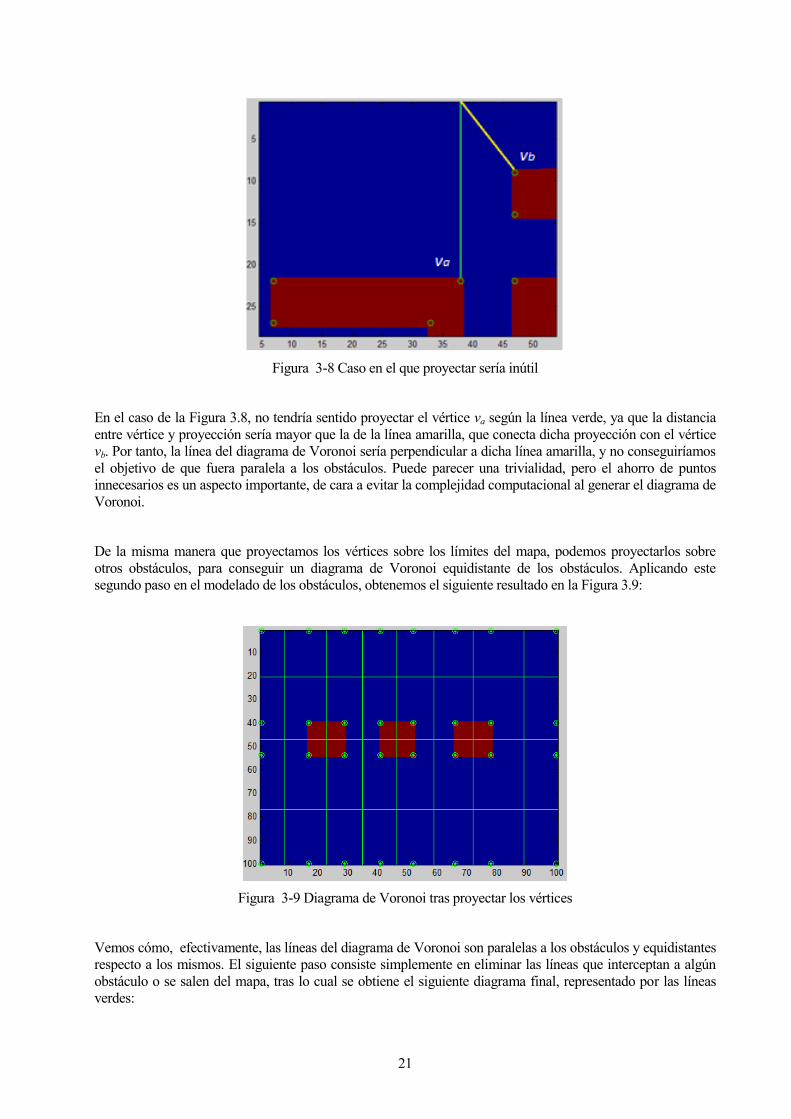
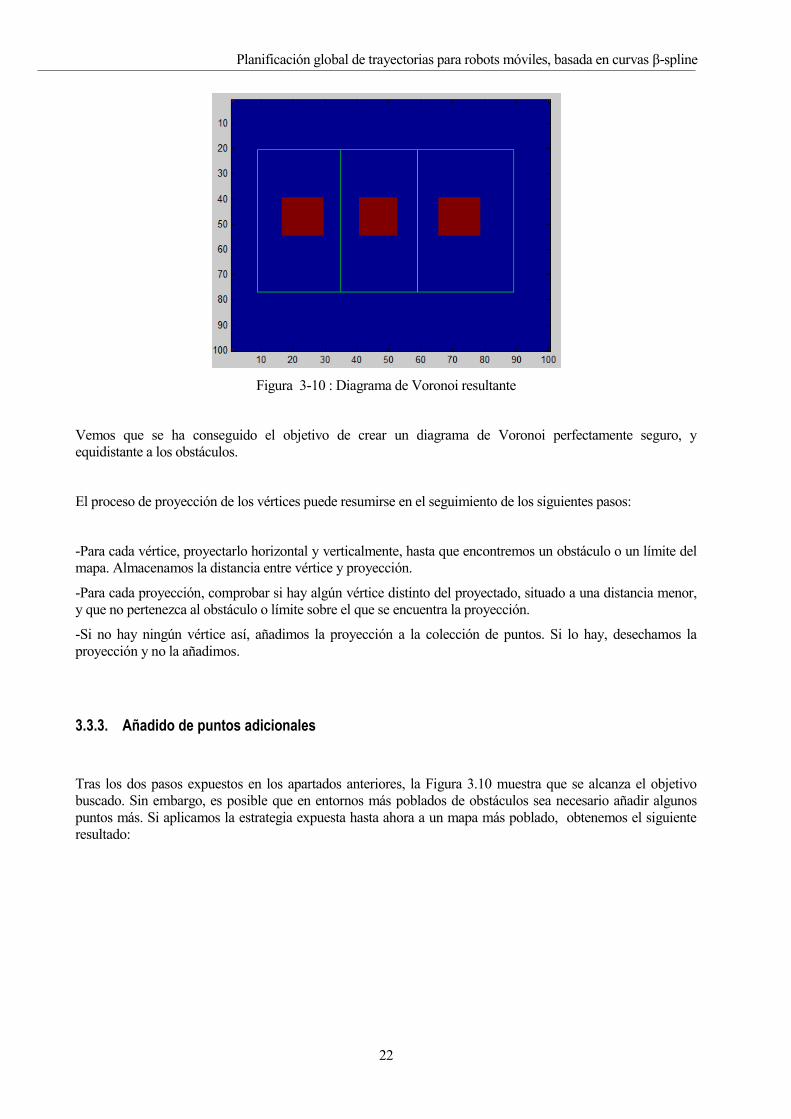
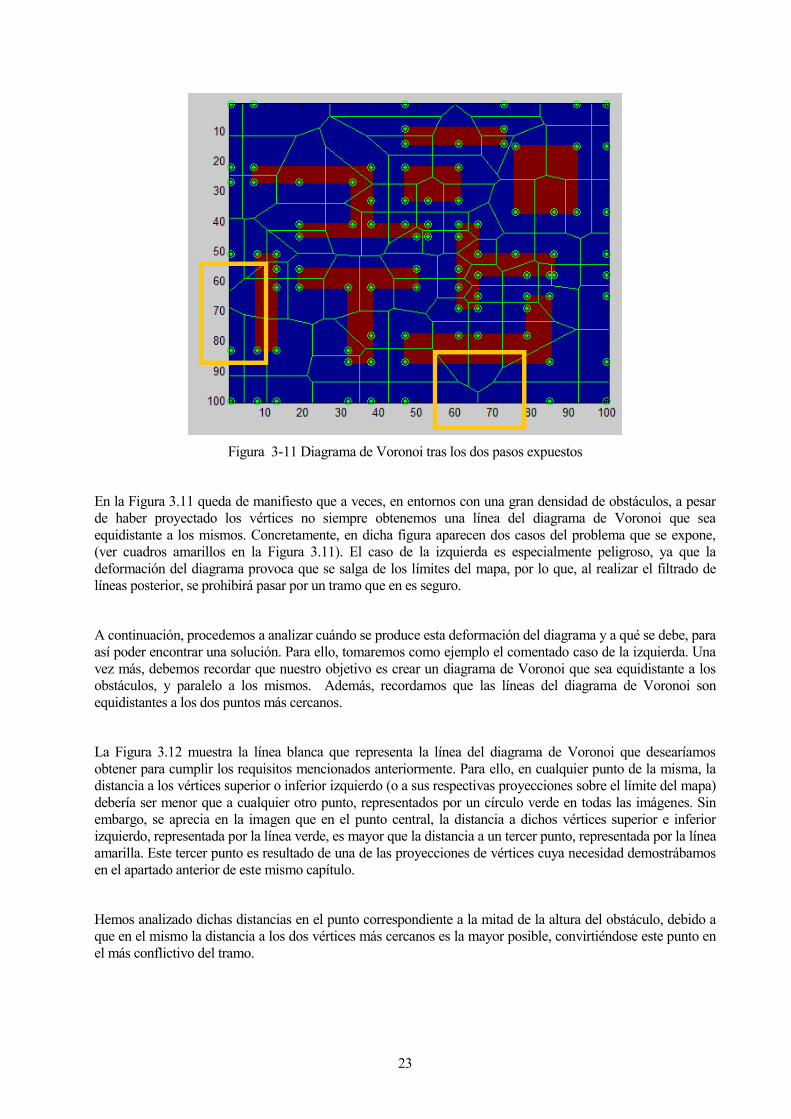
3.3. Modelado de obstáculos 15 3.3.1. Selección de vértices 16 3.3.2. Proyección de los vértices 20 3.3.3. Añadido de puntos adicionales 22
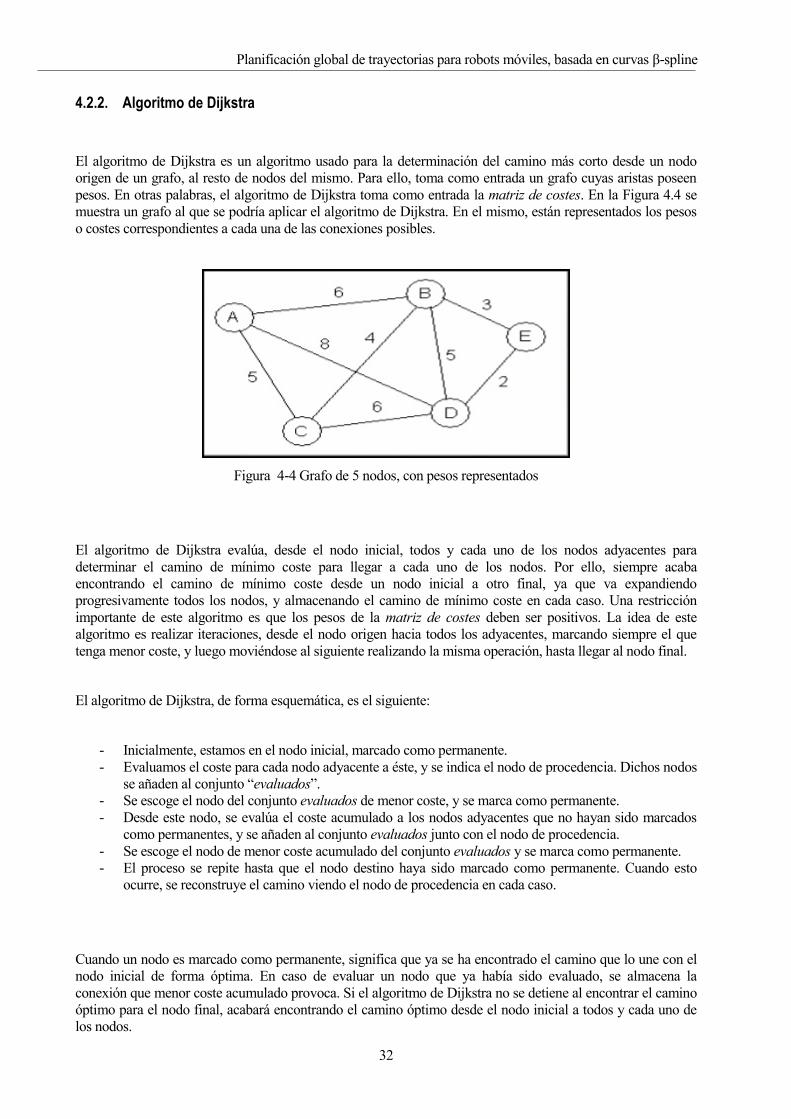
4 Selección del camino y suavizado con curvas beta-spline 27 4.1. Introducción 27 4.2. Algoritmos de planificación 29
4.2.1. Construcción de la matriz de costes 29 4.2.2. Algoritmo de Dijkstra 32 4.2.3. Algoritmo A* 34
4.3. Interpolación mediante curvas β-spline 35 4.3.1. Acotación cartesiana 39 4.3.2. Condiciones iniciales y finales de la curva β-spline 41
4.4. Selección del camino y suavizado 44 4.4.1. Selección del camino 45 4.4.2. Suavizado del camino 52
La expresión (4-38) se deduce simplemente de girar un vector un determinado ángulo 𝛽. De esta forma,
mediante el vector 𝑡𝑟𝑒𝑎𝑙⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗ obtenemos el punto de tangencia, y con la pendiente mreal queda totalmente definida la
tangente.
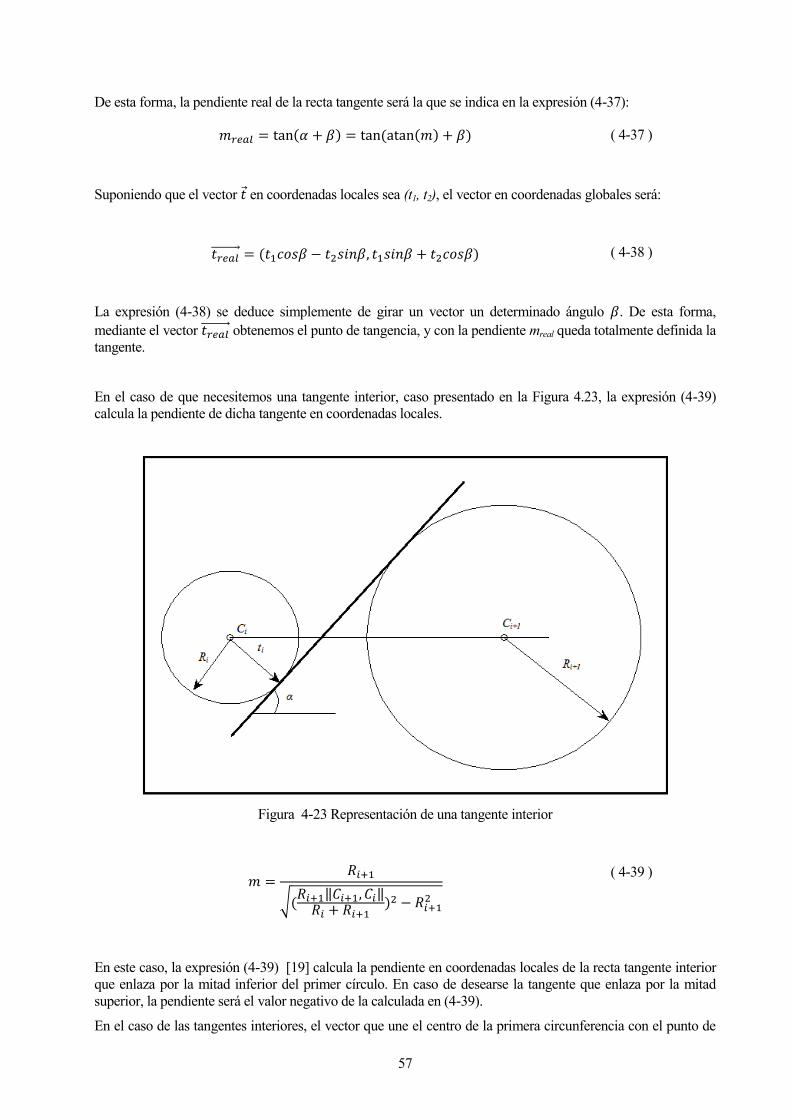
En el caso de que necesitemos una tangente interior, caso presentado en la Figura 4.23, la expresión (4-39)
calcula la pendiente de dicha tangente en coordenadas locales.
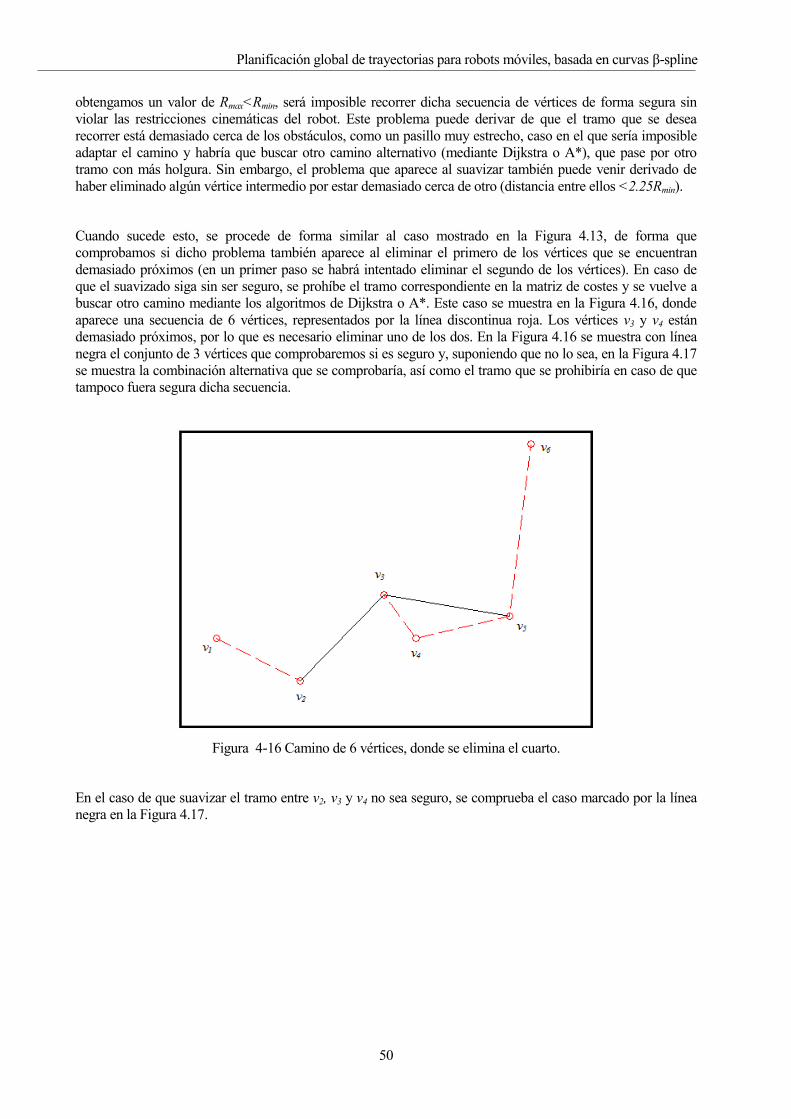
Figura 4-23 Representación de una tangente interior
𝑚 =𝑅𝑖+1
√(𝑅𝑖+1‖𝐶𝑖+1, 𝐶𝑖‖𝑅𝑖 + 𝑅𝑖+1
)2 − 𝑅𝑖+12
( 4-39 )
En este caso, la expresión (4-39) [19] calcula la pendiente en coordenadas locales de la recta tangente interior
que enlaza por la mitad inferior del primer círculo. En caso de desearse la tangente que enlaza por la mitad
superior, la pendiente será el valor negativo de la calculada en (4-39).
En el caso de las tangentes interiores, el vector que une el centro de la primera circunferencia con el punto de
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
58
tangencia, en coordenadas locales, se obtiene según la expresión (4-40):
𝑡 = (1,−1
𝑚)/ ‖(1,−
1
𝑚)‖
( 4-40 )
En este caso no ocurre como con las tangentes exteriores, donde la orientación del vector dependía de qué
radio era mayor, como se mostraba en las expresiones (4-36). En el caso de las tangentes interiores, si
enlazamos por la mitad inferior de la primera circunferencia, la tangente siempre será ascendente, y si
enlazamos por la mitad superior, siempre será descendente.
Una vez obtenidos el vector 𝑡 y la pendiente m, se procede de forma análoga al caso de las tangentes
exteriores, es decir, se transforman dichos valores a las coordenadas globales mediante las expresiones (4-37)
y (4-38).
A continuación se expone el método seguido para identificar si necesitamos enlazar las circunferencias por la
mitad superior o inferior de la primera de ellas. Según este método, el factor determinante es la orientación del
vector bisectriz, mostrado en la Figura 4.20 como bi.
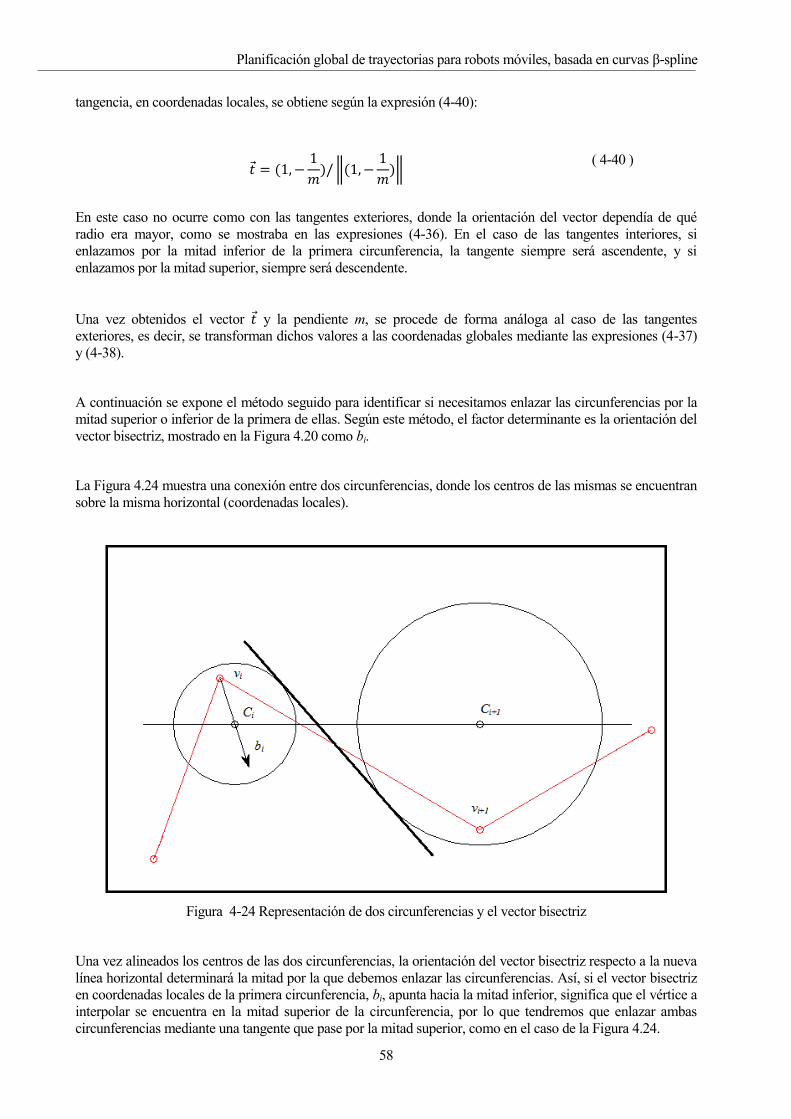
La Figura 4.24 muestra una conexión entre dos circunferencias, donde los centros de las mismas se encuentran
sobre la misma horizontal (coordenadas locales).
Figura 4-24 Representación de dos circunferencias y el vector bisectriz
Una vez alineados los centros de las dos circunferencias, la orientación del vector bisectriz respecto a la nueva
línea horizontal determinará la mitad por la que debemos enlazar las circunferencias. Así, si el vector bisectriz
en coordenadas locales de la primera circunferencia, bi, apunta hacia la mitad inferior, significa que el vértice a
interpolar se encuentra en la mitad superior de la circunferencia, por lo que tendremos que enlazar ambas
circunferencias mediante una tangente que pase por la mitad superior, como en el caso de la Figura 4.24.
59
En cambio, si el vector bisectriz local bi apunta hacia la mitad superior, tendremos que enlazar las
circunferencias mediante una tangente que pase por la mitad inferior de la primera circunferencia. Vemos que
no es necesario determinar en qué mitad cortará la tangente a la segunda circunferencia, ya que esto vendrá
determinado por el tipo de tangente que vamos a utilizar. Así, si se trata de una tangente exterior, cortará a
ambas circunferencias por la misma mitad, superior o inferior. En cambio, si se trata de una tangente interior,
cortará a cada circunferencia en una mitad distinta.
Para comprobar la posición del vector bisectriz con respecto a la línea que une los centros, basta con realizar
una rotación del vector bi un ángulo β, y ver si la componente horizontal del vector una vez girado es positiva o
negativa. Al igual que en casos anteriores, β es el ángulo que forma la línea que une ambos centros con la
horizontal.
De esta forma, deducimos por qué mitad queremos que pase la recta tangente, y siguiente el método expuesto
a lo largo de este apartado, queda perfectamente definida la recta tangente que enlaza las dos circunferencias
de forma correcta. El proceso de construcción de las tangentes puede resumirse, por tanto, en los siguientes
pasos:
- Saber si necesitamos una tangente exterior o interior.
- Selección de la mitad por la que queremos enlazar.
- Obtención de la pendiente y el punto de tangencia, con el método explicado.
En el caso del primer y último punto del camino, se enlazan con el primer y último círculo, respectivamente,
mediante una tangente al círculo correspondiente que pase por el punto extremo (inicial o final).
De esta forma, una vez definidas todas las circunferencias y tangentes, ya está definida la curva sobre la que se
situarán los vértices del polígono de control.
4.4.2.3. Construcción del polígono de control
El último paso para el suavizado es la colocación de los vértices del polígono de control sobre la curva
compuesta por los arcos de circunferencia y las rectas tangentes. Consideramos que las tangentes vienen
definidas por los puntos de tangencia inicial y final, y las circunferencias vienen definidas por su centro y su
radio.
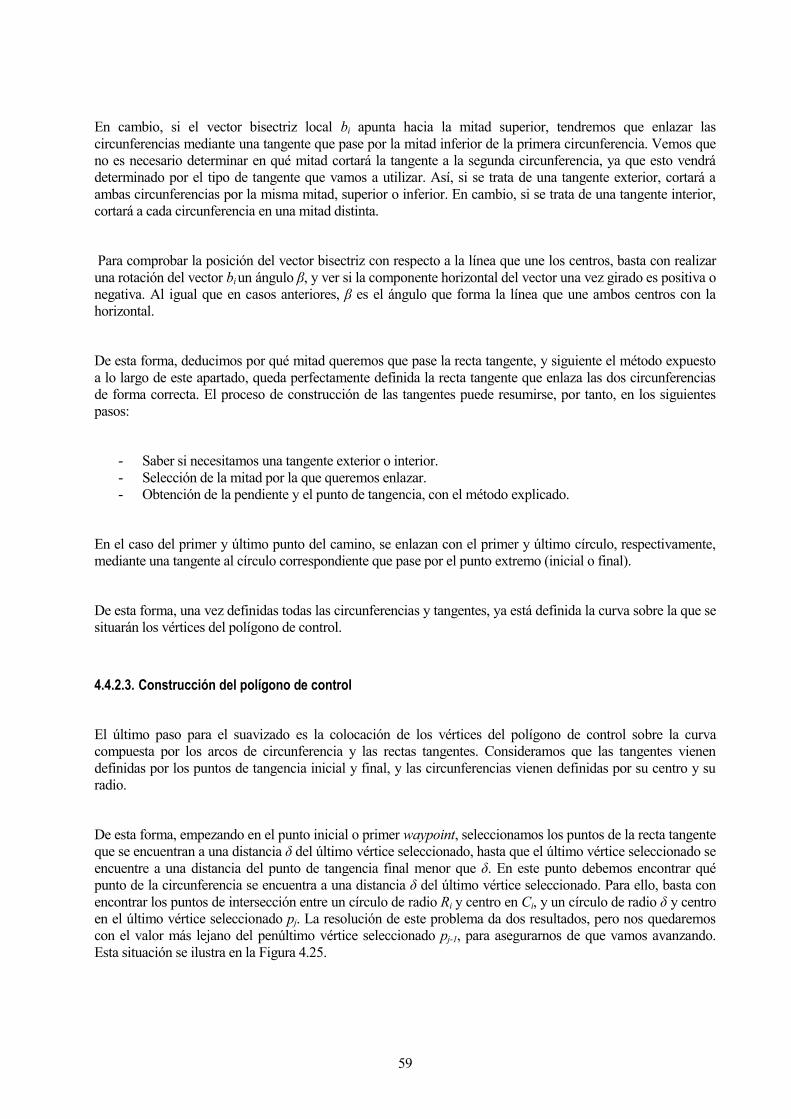
De esta forma, empezando en el punto inicial o primer waypoint, seleccionamos los puntos de la recta tangente
que se encuentran a una distancia δ del último vértice seleccionado, hasta que el último vértice seleccionado se
encuentre a una distancia del punto de tangencia final menor que δ. En este punto debemos encontrar qué
punto de la circunferencia se encuentra a una distancia δ del último vértice seleccionado. Para ello, basta con
encontrar los puntos de intersección entre un círculo de radio Ri y centro en Ci, y un círculo de radio δ y centro
en el último vértice seleccionado pj. La resolución de este problema da dos resultados, pero nos quedaremos
con el valor más lejano del penúltimo vértice seleccionado pj-1, para asegurarnos de que vamos avanzando.
Esta situación se ilustra en la Figura 4.25.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
60
Figura 4-25 Búsqueda de vértices separados una distancia δ
Para colocar los puntos sobre una recta, podemos hacerlo inmediatamente si calculamos el vector director. Sin
embargo, cuando los vértices no pertenecen a la misma recta, actuamos según la Figura 4.25. En ella aparecen
en azul los puntos que ya hemos añadido al polígono de control, y en rojo el vértice que interpolará la β-spline
final. Para encontrar qué punto de la circunferencia dista una distancia δ, buscamos la intersección de las dos
circunferencias que se muestran en dicha figura.
Este proceso se repite con cada vértice mientras que el último vértice encontrado se encuentre a una distancia
del punto de tangencia inicial de la siguiente recta tangente menor que δ. Cuando esto ocurre, significa que ya
se ha recorrido el arco de la circunferencia y necesitamos enlazar con la siguiente recta tangente, por lo que se
actúa de igual manera que con la tangente inicial. Este proceso se repite para cada arco y cada recta, hasta
llegar al punto final.
Una vez acabado el proceso, se obtiene una serie de vértices del polígono de control colocados de forma
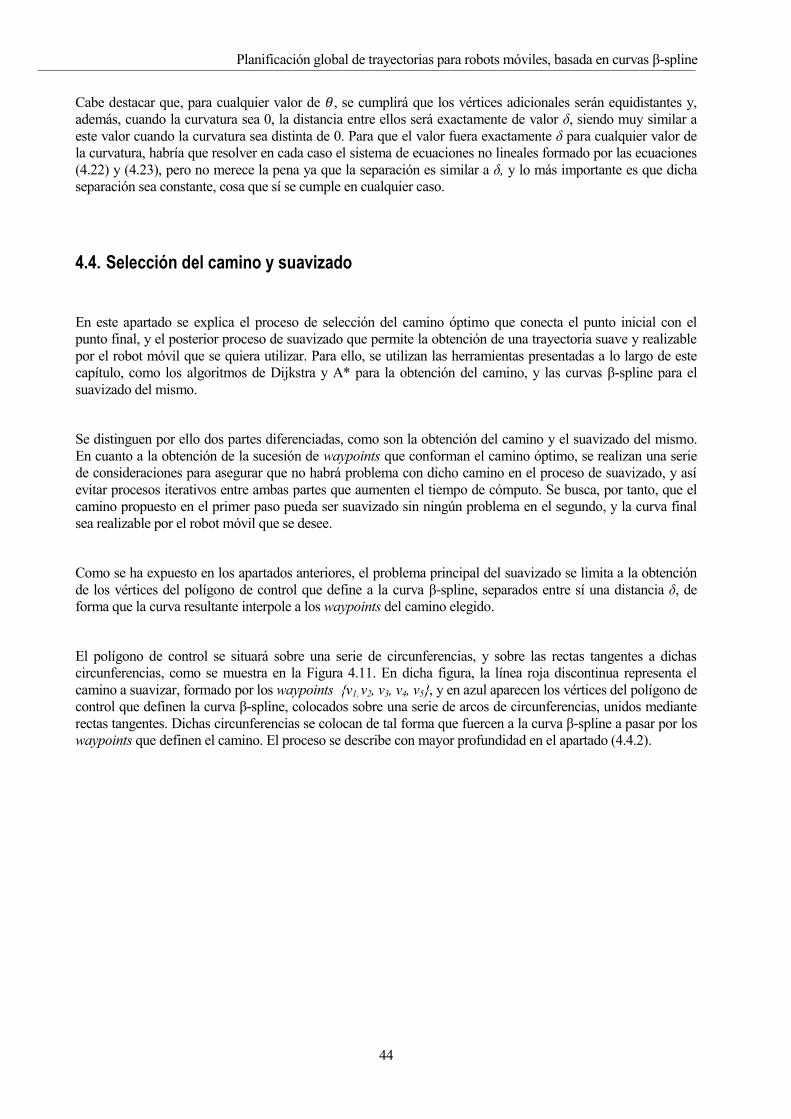
equidistante sobre una serie de rectas y arcos de circunferencia (ver Figura 4.11).
A partir de este polígono de control, más los vértices adicionales correspondientes para forzar unas
condiciones iniciales y finales (apartado 4.3.2), se asegura que la curva β-spline generada interpolará a los
distintos waypoints, y será una curva continua en posición, orientación y curvatura. Además, gracias a la
separación constante entre los vértices del polígono de control, la curvatura se encontrará acotada y presentará
una variación aproximadamente lineal, lo que facilita la labor del seguidor de caminos. Gracias a todas las
consideraciones tomadas a lo largo del proceso, la curva generada supondrá una trayectoria segura y
perfectamente realizable por el robot móvil para el que se ha ideado. Por tanto, se consigue así el objetivo de
idear un método seguro y flexible, ya que no está sujeto a un robot móvil en concreto, si no que se adapta a las
características deseadas simplemente modificando los parámetros de distancia de seguridad y radio mínimo
admisible.
61
En el capítulo 5 se muestran los resultados obtenidos al aplicar este método a distintos mapas de obstáculos, y
con distintos modelos de robots móviles.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
62
63
5 SIMULACIONES
ste capítulo pretende validar el método presentado, mostrando para ello una serie de simulaciones en
distintos entornos, y con robots móviles de distintas características. En estas simulaciones se pretende
encontrar una trayectoria segura entre un punto inicial y un punto final, de forma que sea realizable por
un robot móvil. El objetivo es mostrar que se cumplen los dos requisitos principales del método: seguridad y
flexibilidad, entendiendo flexibilidad como la capacidad de adaptar un camino para que sea realizable por un
robot de características concretas.
5.1. Introducción
Las simulaciones llevadas a cabo tienen lugar en tres mapas distintos, variando el número de obstáculos.
Además, se varían los parámetros que definen al robot, como son la distancia de seguridad y el radio mínimo,
y se comprueba cómo reacciona el método ante estos cambios.
También se comparan las soluciones proporcionadas por los algoritmos de Dijkstra y A*, y se muestra que en
algunos casos proporcionan soluciones diferentes. Se incluye al final del capítulo una tabla que incluye el
tiempo invertido en cada una de las simulaciones, tanto con Dijkstra como con A*. Este tiempo refleja el
tiempo invertido desde la ejecución del programa, hasta que se obtiene la trayectoria final a seguir.
En el capítulo 4 se expuso que para saber si el suavizado de determinado tramo era seguro o no, se
consideraba el caso más desfavorable. En este capítulo se comprueba hasta qué punto esta consideración es
acertada, mediante un estudio que verifica cuántas veces se prohíbe un camino que en realidad es seguro.
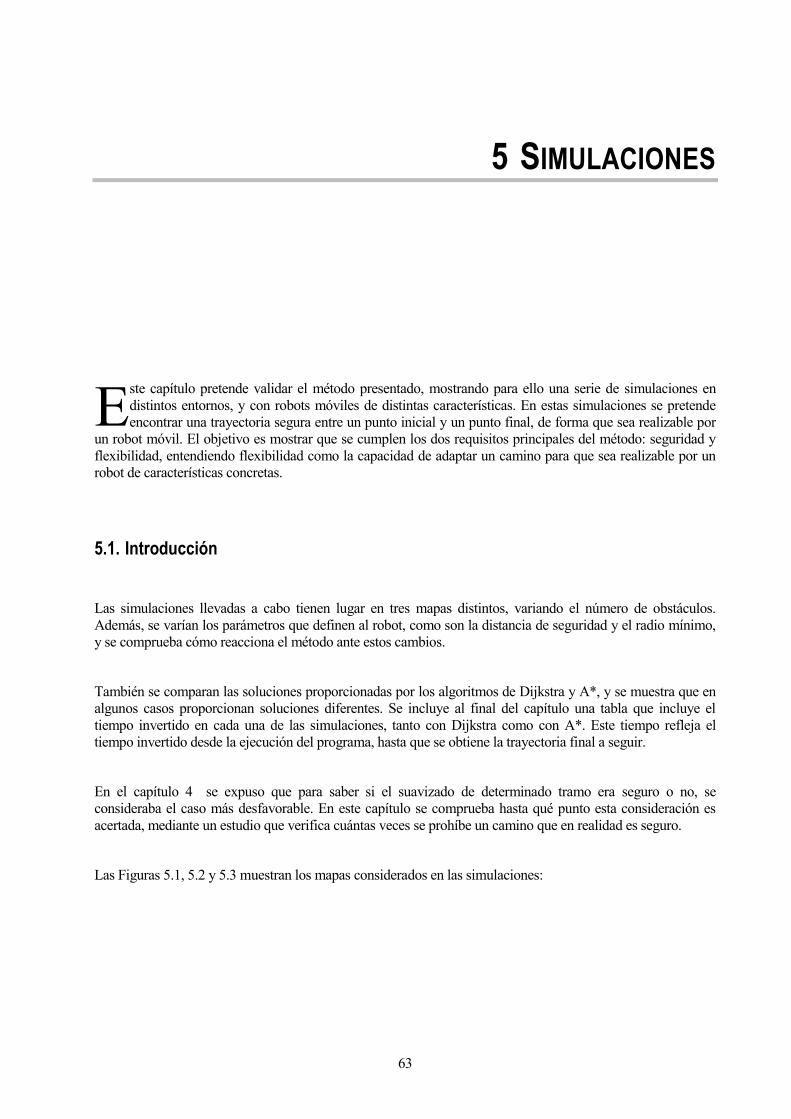
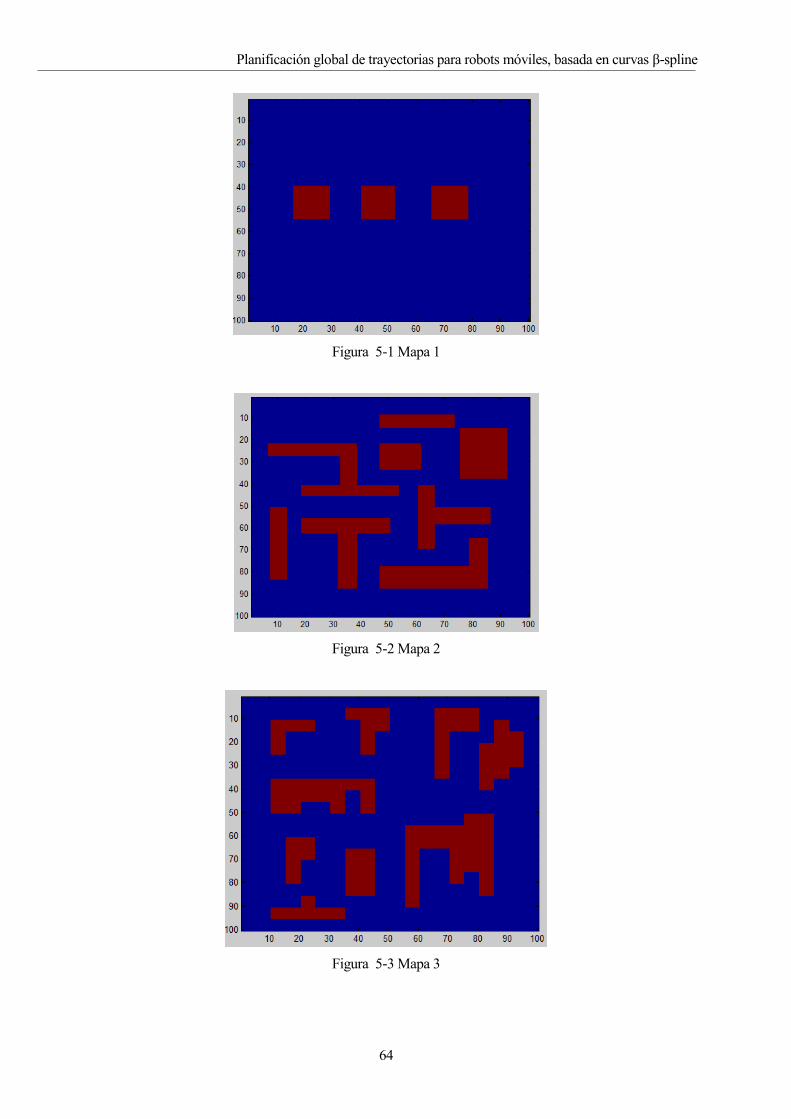
Las Figuras 5.1, 5.2 y 5.3 muestran los mapas considerados en las simulaciones:
E
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
64
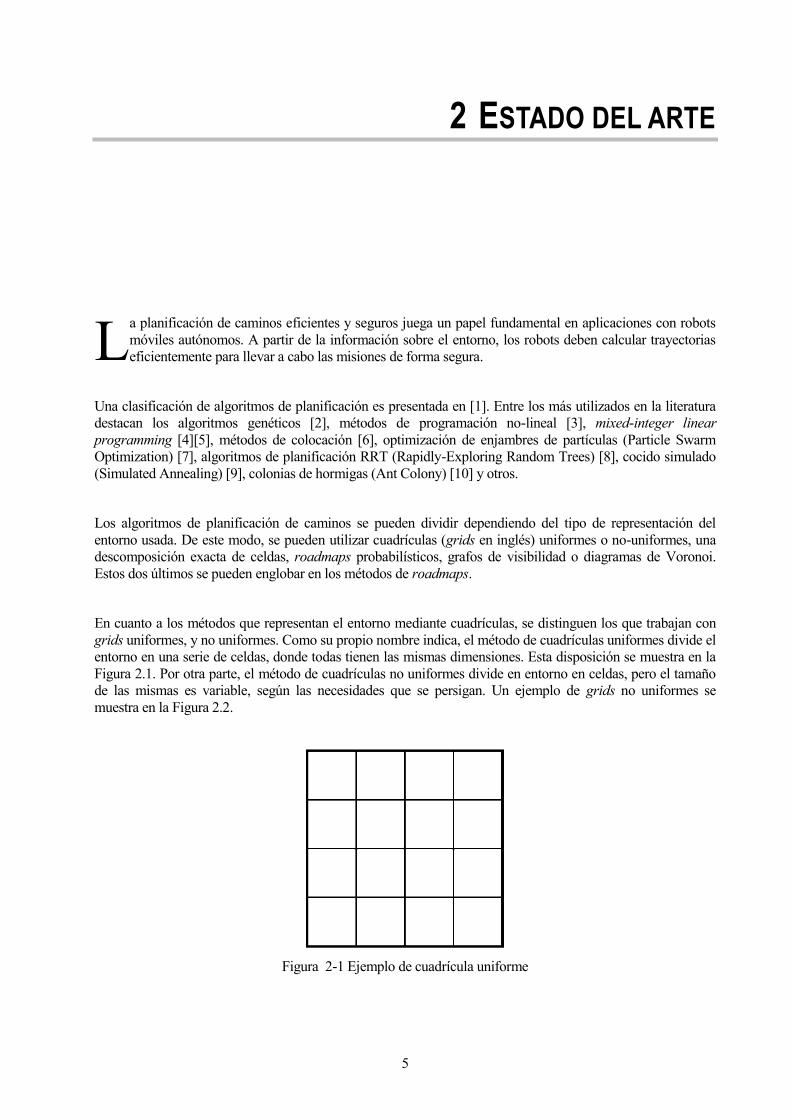
Figura 5-1 Mapa 1
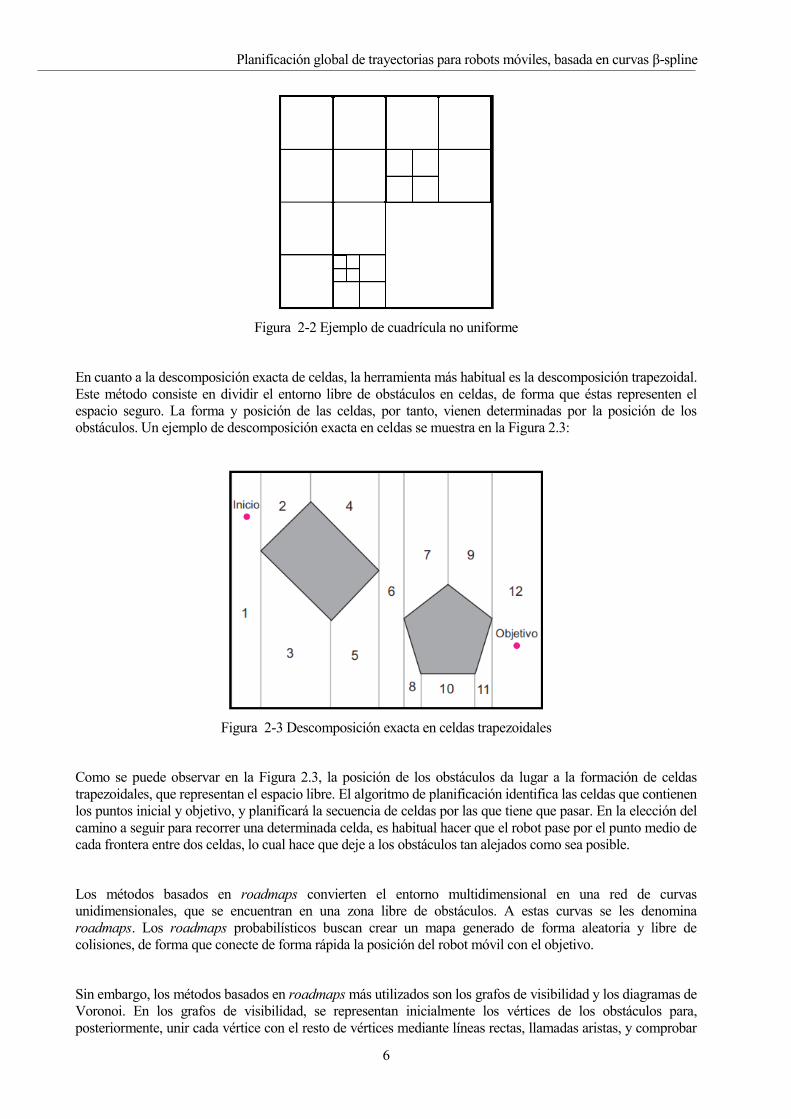
Figura 5-2 Mapa 2
Figura 5-3 Mapa 3
65
Resulta evidente la disparidad entre los distintos mapas, lo cual pretende demostrar que el método se adapta a
mapas muy diferentes. El Mapa 1, mostrado en la Figura 5.1, tiene muy pocos obstáculos y parece a priori un
mapa muy sencillo, pero en cambio el mapa de la Figura 5.2 (Mapa2) supone un entorno mucho más poblado
de obstáculos. Por último, el mapa dela Figura 5.3 (Mapa3) pretende representar un entorno bastante poblado
de obstáculos, donde los mismos presentan formas muy irregulares y desordenadas. Los tres mapas tienen un
tamaño de 100x100, donde cada casilla se considera que tiene 1 metro de lado.
5.2. Simulaciones
Todas las simulaciones mostradas en este capítulo se han realizado considerando un modelo de UAV que se
mantiene a altura constante. La implementación del método presentado está orientada a planificación en dos
dimensiones. Las ecuaciones que definen el modelo son las siguientes:
𝑥�̇� = 𝑣 𝑐𝑜𝑠𝜃𝑖
𝑦�̇� = 𝑣 𝑠𝑖𝑛𝜃𝑖
𝜃�̇� = 𝛼𝜃(𝜃𝑐 − 𝜃𝑖)
( 5-1 )
Siendo 𝜃 el ángulo formado con la horizontal (heading), 𝛼𝜃= 1.32s-1 y 𝜃𝑐 el ángulo necesario para apuntar al
siguiente waypoint desde el punto actual. La restricción en velocidad angular de este modelo es −𝑤 < 𝜃�̇� <𝑤, siendo w=0.28 rad/s. Discretizando las expresiones de (5-1) para un período de muestreo T, se obtienen las
siguientes ecuaciones discretas para la posición en cada instante:
𝑥𝑘+1 = 𝑣 𝑇 cos(𝜃𝑘) + 𝑥𝑘
𝑦𝑘+1 = 𝑣 𝑇 sin(𝜃𝑘) + 𝑦𝑘
𝜃𝑘+1 = 𝛼𝜃 𝑇 (𝜃𝑐 − 𝜃𝑘) + 𝜃𝑘
( 5-2 )
Éste es el modelo utilizado en todas las simulaciones, pero cambiando los valores de distancia de seguridad y
radio mínimo de giro se consigue el mismo resultado que cambiando el modelo de robot móvil, por lo que se
puede seguir esta estrategia para demostrar la flexibilidad del método. Cambiar el radio mínimo de giro
equivaldría a modificar la velocidad constante que se quiere mantener en el trayecto.
En primer lugar, vamos a mostrar los distintos pasos que se realizan para acabar encontrando la trayectoria
final entre un punto inicial y otro final. Para ello, utilizamos el mapa 1. El punto inicial lo situamos en las
coordenadas [5,95], que equivale a la columna 5 (eje x) y la fila 95 (eje y) en la matriz que define nuestro
mapa. El punto objetivo será el [95,5] que se encuentra en el extremo opuesto del mapa. En cuanto a los
parámetros que definen nuestro robot móvil, exigimos en este caso una distancia de seguridad de 1 metro, y un
radio mínimo de 2 metros (lo que en el modelo utilizado equivale a una velocidad constante de 0.5 m/s).
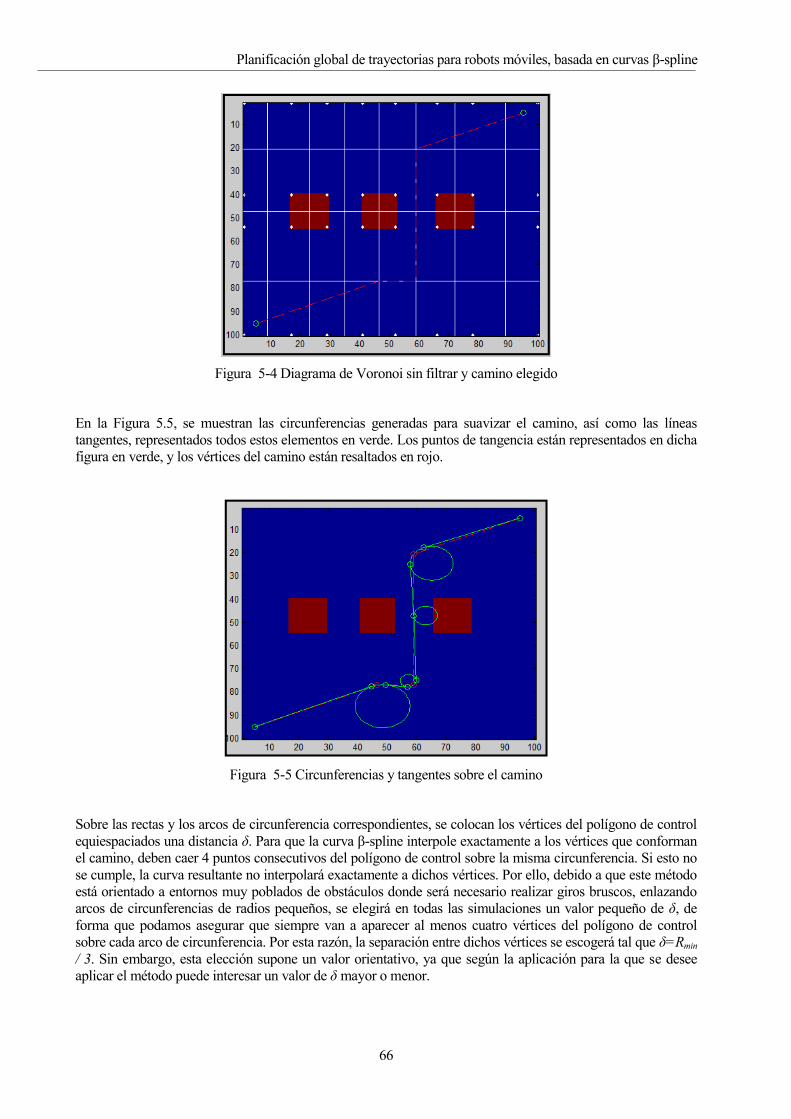
En la Figura 5.4, aparece el diagrama de Voronoi sin filtrar, con línea azul, y el camino elegido con línea roja
discontínua. Tanto con el algoritmo de Dijkstra como con el de A* se obtiene el mismo resultado.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
66
Figura 5-4 Diagrama de Voronoi sin filtrar y camino elegido
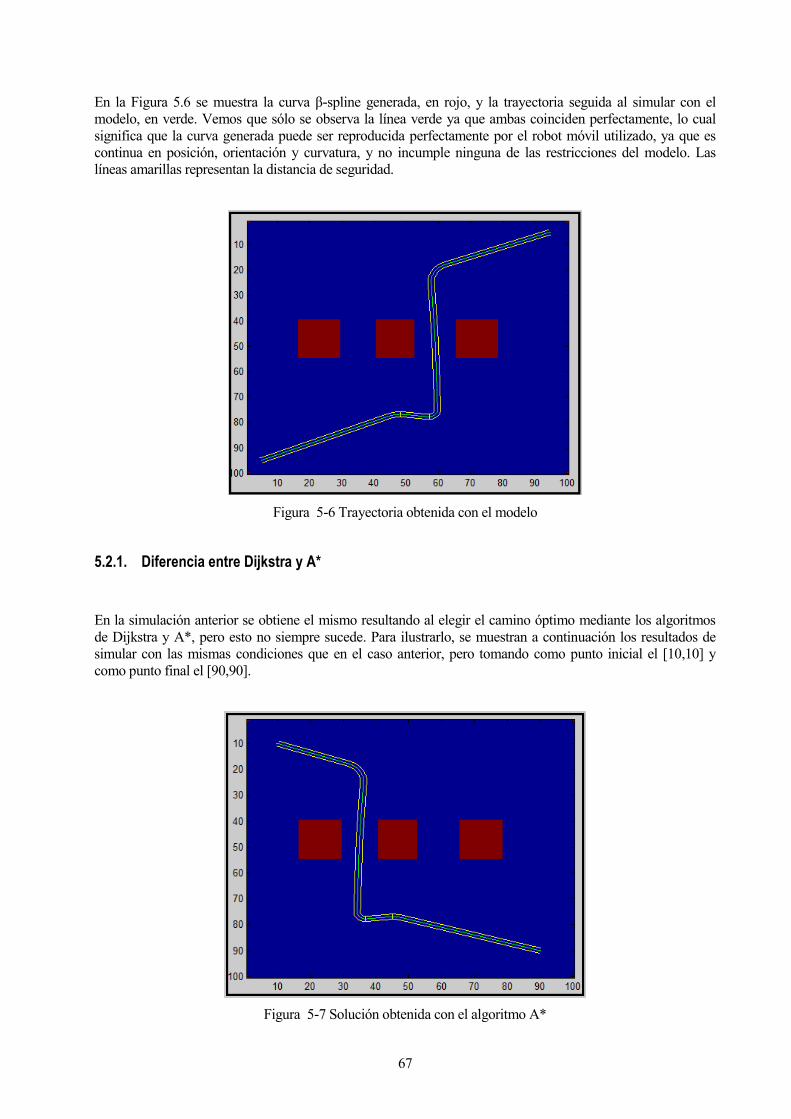
En la Figura 5.5, se muestran las circunferencias generadas para suavizar el camino, así como las líneas
tangentes, representados todos estos elementos en verde. Los puntos de tangencia están representados en dicha
figura en verde, y los vértices del camino están resaltados en rojo.
Figura 5-5 Circunferencias y tangentes sobre el camino
Sobre las rectas y los arcos de circunferencia correspondientes, se colocan los vértices del polígono de control
equiespaciados una distancia δ. Para que la curva β-spline interpole exactamente a los vértices que conforman
el camino, deben caer 4 puntos consecutivos del polígono de control sobre la misma circunferencia. Si esto no
se cumple, la curva resultante no interpolará exactamente a dichos vértices. Por ello, debido a que este método
está orientado a entornos muy poblados de obstáculos donde será necesario realizar giros bruscos, enlazando
arcos de circunferencias de radios pequeños, se elegirá en todas las simulaciones un valor pequeño de δ, de
forma que podamos asegurar que siempre van a aparecer al menos cuatro vértices del polígono de control
sobre cada arco de circunferencia. Por esta razón, la separación entre dichos vértices se escogerá tal que δ=Rmin
/ 3. Sin embargo, esta elección supone un valor orientativo, ya que según la aplicación para la que se desee
aplicar el método puede interesar un valor de δ mayor o menor.
67
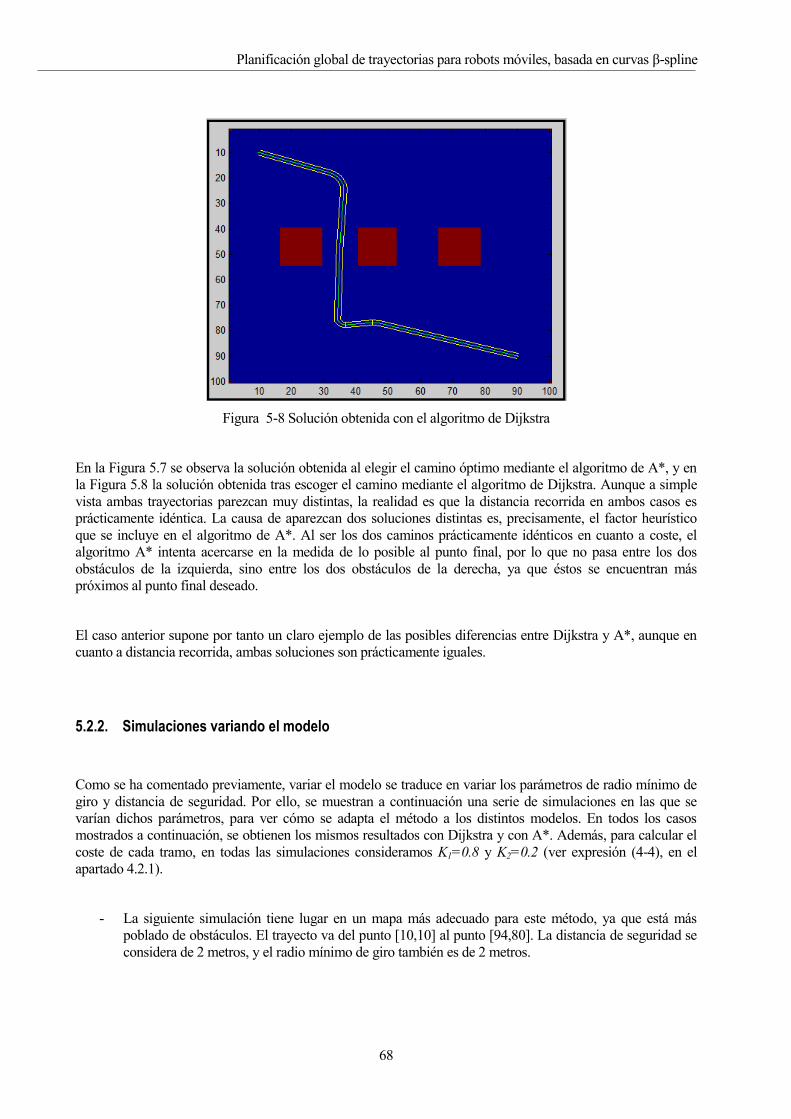
En la Figura 5.6 se muestra la curva β-spline generada, en rojo, y la trayectoria seguida al simular con el
modelo, en verde. Vemos que sólo se observa la línea verde ya que ambas coinciden perfectamente, lo cual
significa que la curva generada puede ser reproducida perfectamente por el robot móvil utilizado, ya que es
continua en posición, orientación y curvatura, y no incumple ninguna de las restricciones del modelo. Las
líneas amarillas representan la distancia de seguridad.
Figura 5-6 Trayectoria obtenida con el modelo
5.2.1. Diferencia entre Dijkstra y A*
En la simulación anterior se obtiene el mismo resultando al elegir el camino óptimo mediante los algoritmos
de Dijkstra y A*, pero esto no siempre sucede. Para ilustrarlo, se muestran a continuación los resultados de
simular con las mismas condiciones que en el caso anterior, pero tomando como punto inicial el [10,10] y
como punto final el [90,90].
Figura 5-7 Solución obtenida con el algoritmo A*
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
68
Figura 5-8 Solución obtenida con el algoritmo de Dijkstra
En la Figura 5.7 se observa la solución obtenida al elegir el camino óptimo mediante el algoritmo de A*, y en
la Figura 5.8 la solución obtenida tras escoger el camino mediante el algoritmo de Dijkstra. Aunque a simple
vista ambas trayectorias parezcan muy distintas, la realidad es que la distancia recorrida en ambos casos es
prácticamente idéntica. La causa de aparezcan dos soluciones distintas es, precisamente, el factor heurístico
que se incluye en el algoritmo de A*. Al ser los dos caminos prácticamente idénticos en cuanto a coste, el
algoritmo A* intenta acercarse en la medida de lo posible al punto final, por lo que no pasa entre los dos
obstáculos de la izquierda, sino entre los dos obstáculos de la derecha, ya que éstos se encuentran más
próximos al punto final deseado.
El caso anterior supone por tanto un claro ejemplo de las posibles diferencias entre Dijkstra y A*, aunque en
cuanto a distancia recorrida, ambas soluciones son prácticamente iguales.
5.2.2. Simulaciones variando el modelo
Como se ha comentado previamente, variar el modelo se traduce en variar los parámetros de radio mínimo de
giro y distancia de seguridad. Por ello, se muestran a continuación una serie de simulaciones en las que se
varían dichos parámetros, para ver cómo se adapta el método a los distintos modelos. En todos los casos
mostrados a continuación, se obtienen los mismos resultados con Dijkstra y con A*. Además, para calcular el
coste de cada tramo, en todas las simulaciones consideramos K1=0.8 y K2=0.2 (ver expresión (4-4), en el
apartado 4.2.1).
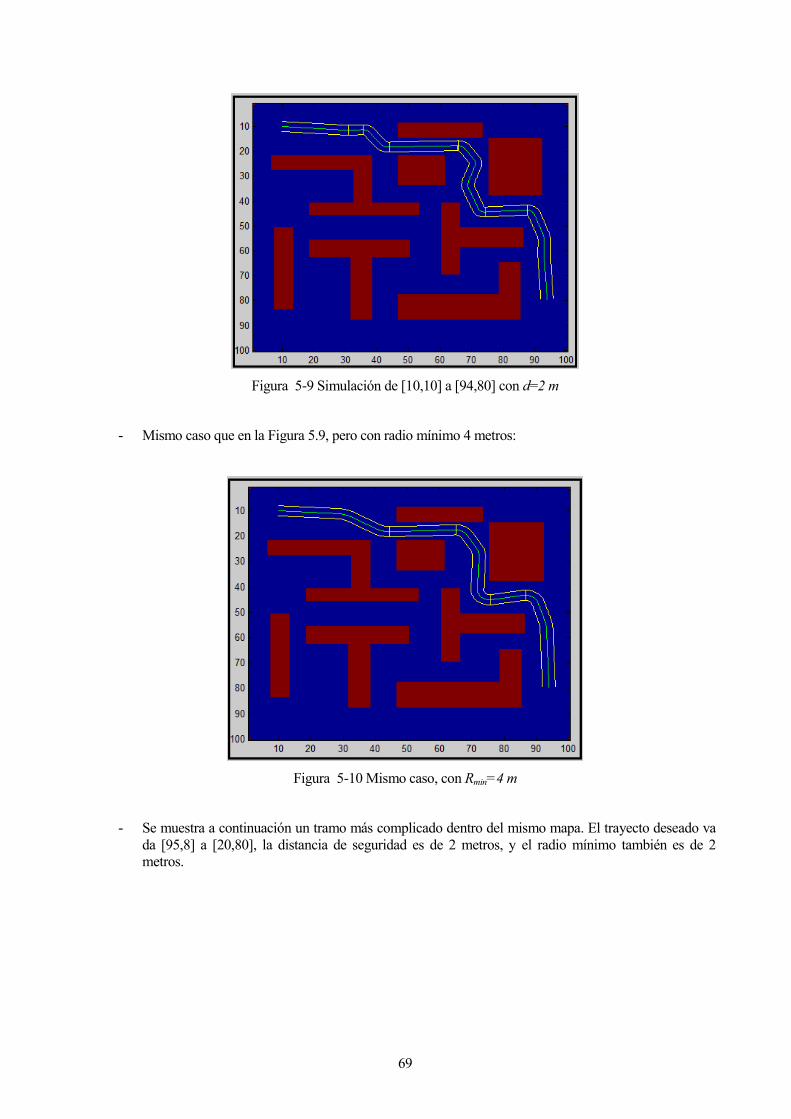
- La siguiente simulación tiene lugar en un mapa más adecuado para este método, ya que está más
poblado de obstáculos. El trayecto va del punto [10,10] al punto [94,80]. La distancia de seguridad se
considera de 2 metros, y el radio mínimo de giro también es de 2 metros.
69
Figura 5-9 Simulación de [10,10] a [94,80] con d=2 m
- Mismo caso que en la Figura 5.9, pero con radio mínimo 4 metros:
Figura 5-10 Mismo caso, con Rmin=4 m
- Se muestra a continuación un tramo más complicado dentro del mismo mapa. El trayecto deseado va
da [95,8] a [20,80], la distancia de seguridad es de 2 metros, y el radio mínimo también es de 2
metros.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
70
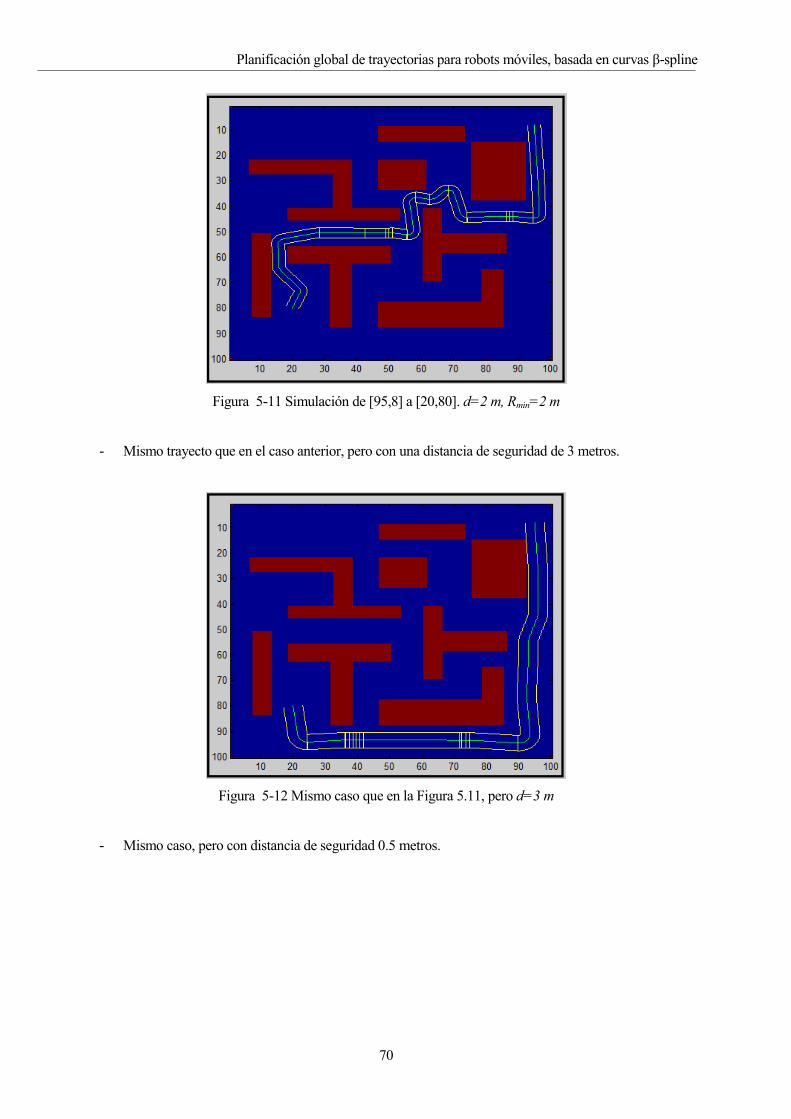
Figura 5-11 Simulación de [95,8] a [20,80]. d=2 m, Rmin=2 m
- Mismo trayecto que en el caso anterior, pero con una distancia de seguridad de 3 metros.
Figura 5-12 Mismo caso que en la Figura 5.11, pero d=3 m
- Mismo caso, pero con distancia de seguridad 0.5 metros.
71
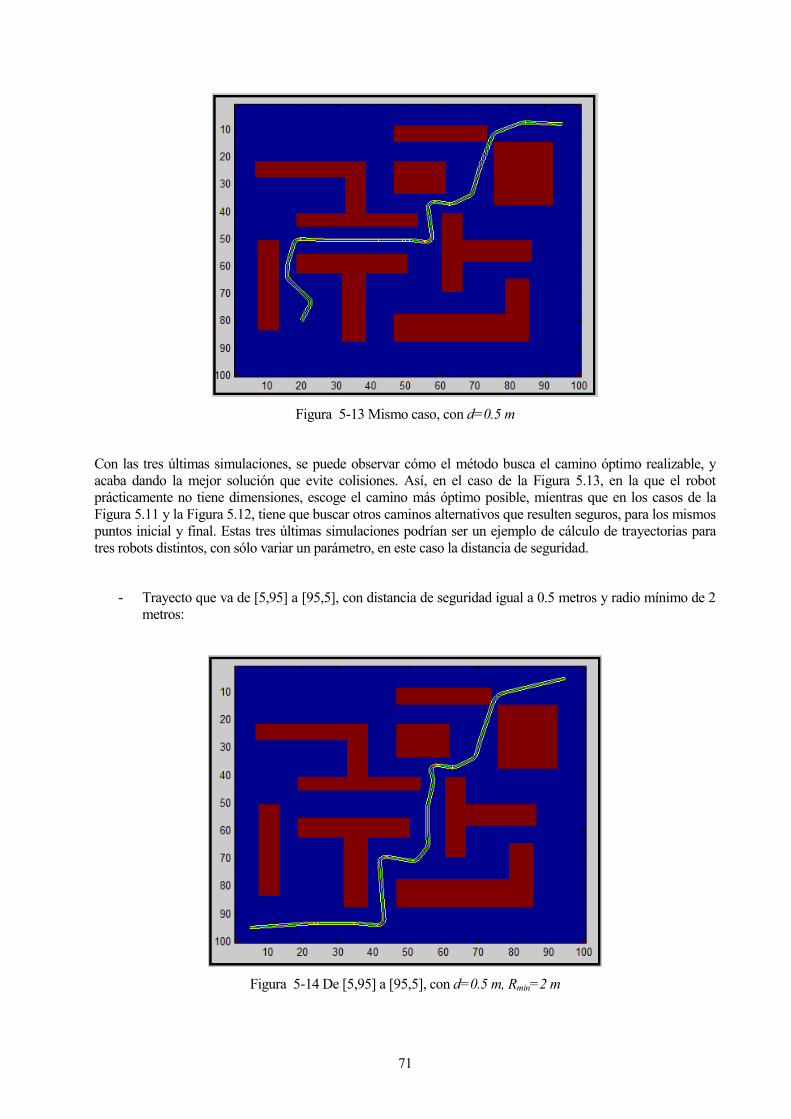
Figura 5-13 Mismo caso, con d=0.5 m
Con las tres últimas simulaciones, se puede observar cómo el método busca el camino óptimo realizable, y
acaba dando la mejor solución que evite colisiones. Así, en el caso de la Figura 5.13, en la que el robot
prácticamente no tiene dimensiones, escoge el camino más óptimo posible, mientras que en los casos de la
Figura 5.11 y la Figura 5.12, tiene que buscar otros caminos alternativos que resulten seguros, para los mismos
puntos inicial y final. Estas tres últimas simulaciones podrían ser un ejemplo de cálculo de trayectorias para
tres robots distintos, con sólo variar un parámetro, en este caso la distancia de seguridad.
- Trayecto que va de [5,95] a [95,5], con distancia de seguridad igual a 0.5 metros y radio mínimo de 2
metros:
Figura 5-14 De [5,95] a [95,5], con d=0.5 m, Rmin=2 m
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
72
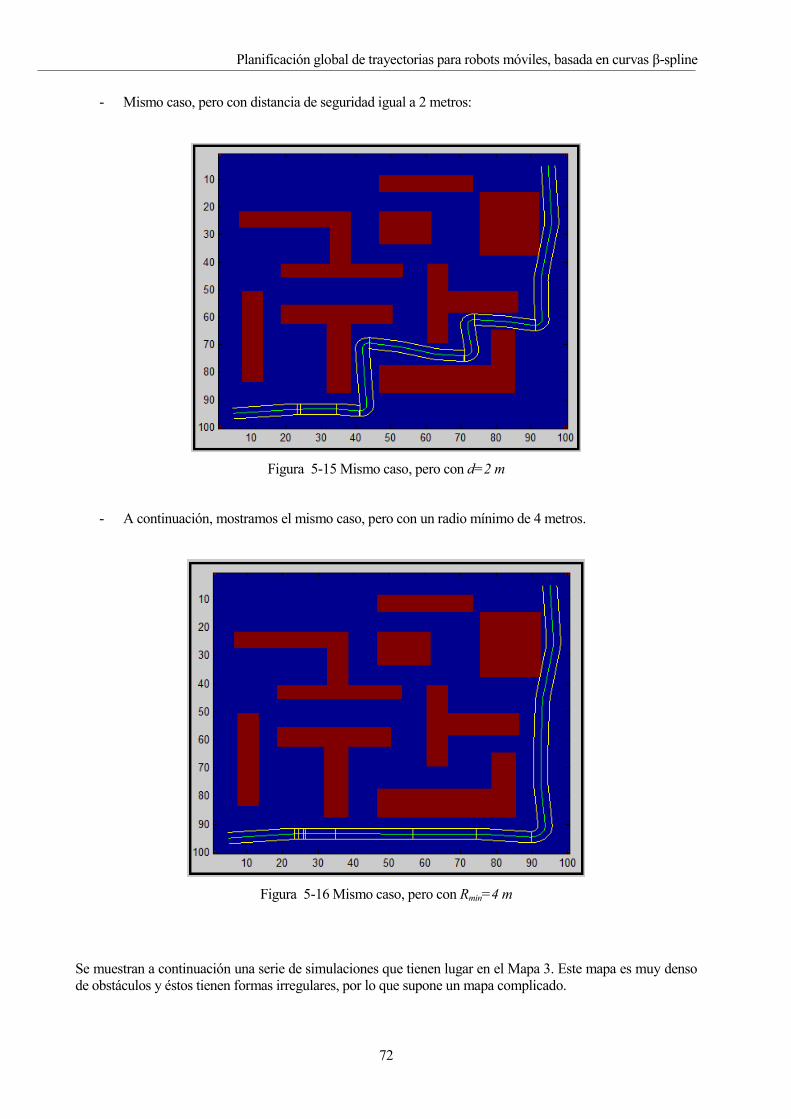
- Mismo caso, pero con distancia de seguridad igual a 2 metros:
Figura 5-15 Mismo caso, pero con d=2 m
- A continuación, mostramos el mismo caso, pero con un radio mínimo de 4 metros.
Figura 5-16 Mismo caso, pero con Rmin=4 m
Se muestran a continuación una serie de simulaciones que tienen lugar en el Mapa 3. Este mapa es muy denso
de obstáculos y éstos tienen formas irregulares, por lo que supone un mapa complicado.
73
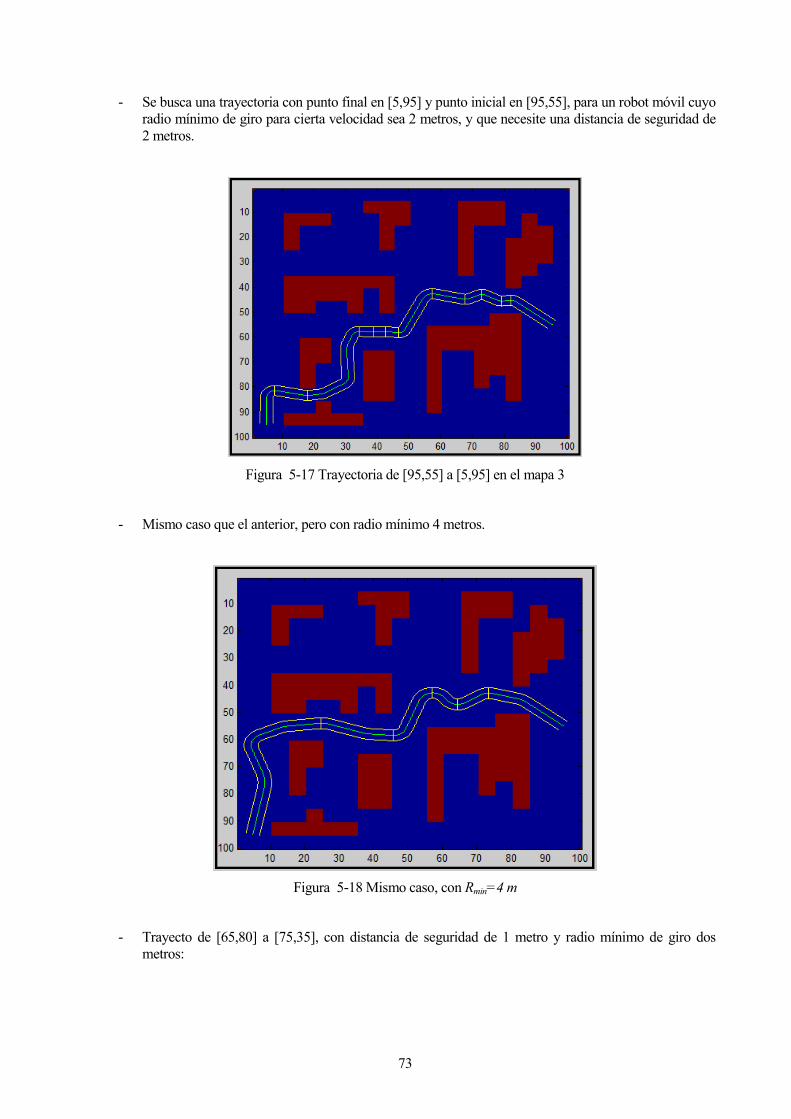
- Se busca una trayectoria con punto final en [5,95] y punto inicial en [95,55], para un robot móvil cuyo
radio mínimo de giro para cierta velocidad sea 2 metros, y que necesite una distancia de seguridad de
2 metros.
Figura 5-17 Trayectoria de [95,55] a [5,95] en el mapa 3
- Mismo caso que el anterior, pero con radio mínimo 4 metros.
Figura 5-18 Mismo caso, con Rmin=4 m
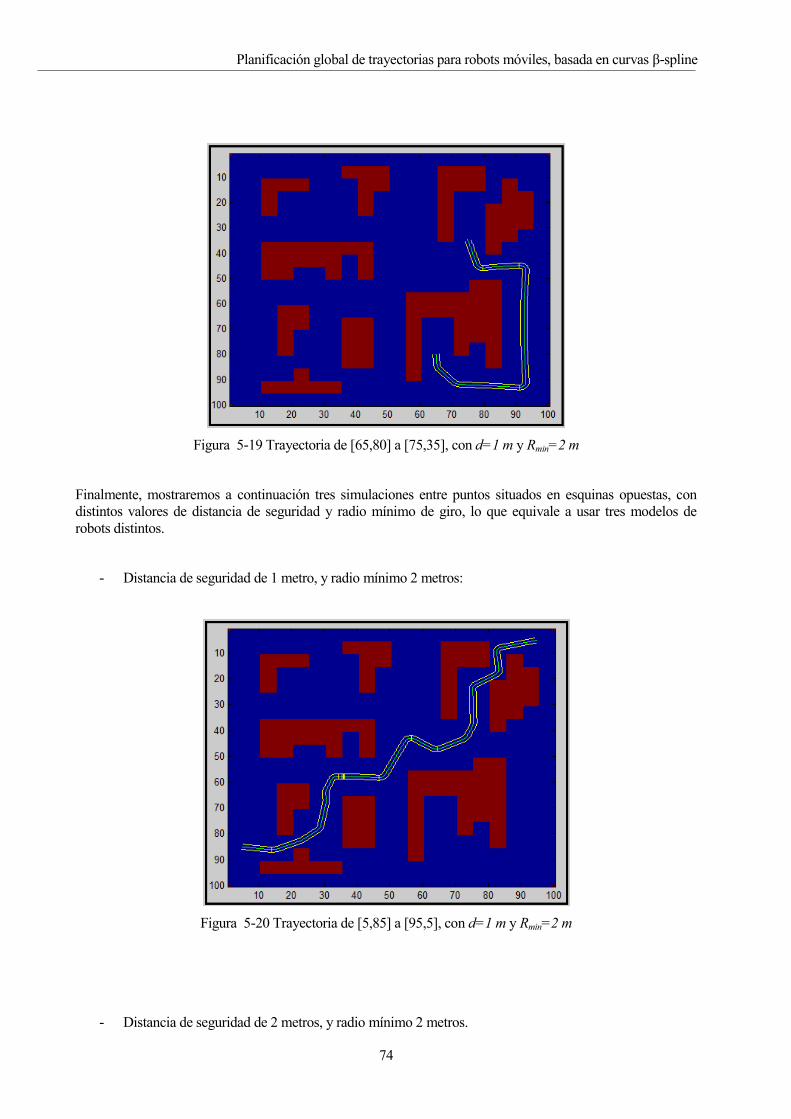
- Trayecto de [65,80] a [75,35], con distancia de seguridad de 1 metro y radio mínimo de giro dos
metros:
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
74
Figura 5-19 Trayectoria de [65,80] a [75,35], con d=1 m y Rmin=2 m
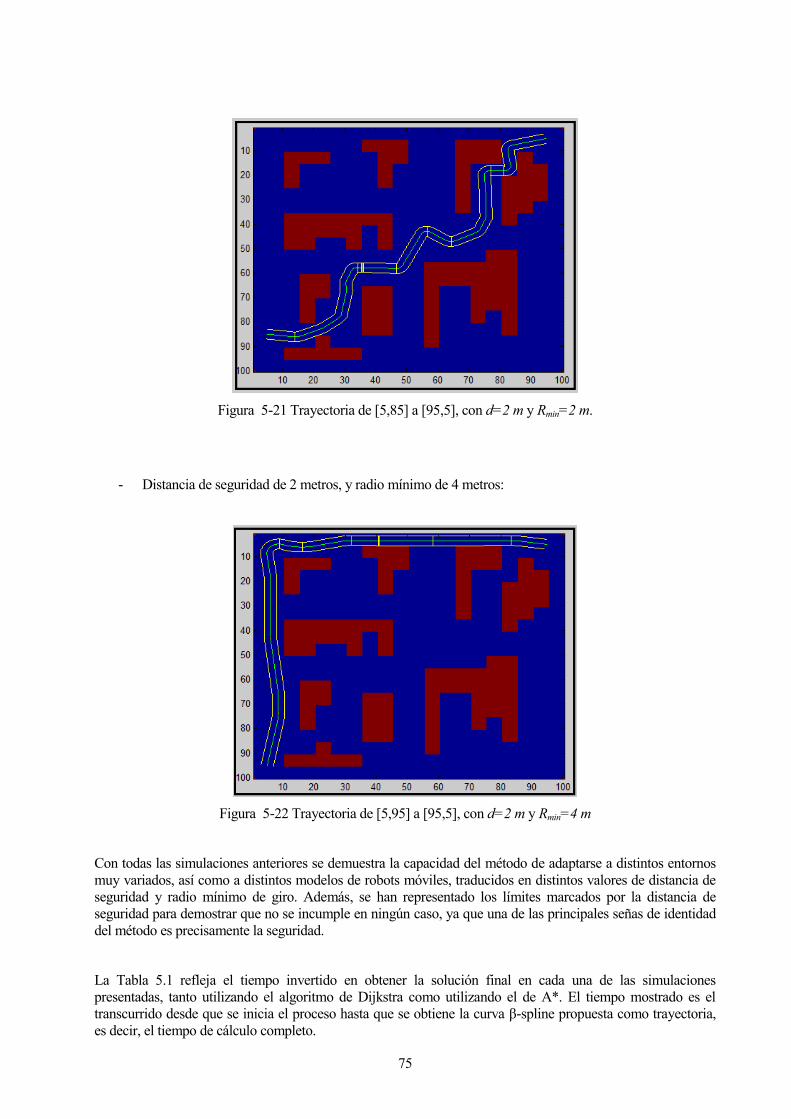
Finalmente, mostraremos a continuación tres simulaciones entre puntos situados en esquinas opuestas, con
distintos valores de distancia de seguridad y radio mínimo de giro, lo que equivale a usar tres modelos de
robots distintos.
- Distancia de seguridad de 1 metro, y radio mínimo 2 metros:
Figura 5-20 Trayectoria de [5,85] a [95,5], con d=1 m y Rmin=2 m
- Distancia de seguridad de 2 metros, y radio mínimo 2 metros.
75
Figura 5-21 Trayectoria de [5,85] a [95,5], con d=2 m y Rmin=2 m.
- Distancia de seguridad de 2 metros, y radio mínimo de 4 metros:
Figura 5-22 Trayectoria de [5,95] a [95,5], con d=2 m y Rmin=4 m
Con todas las simulaciones anteriores se demuestra la capacidad del método de adaptarse a distintos entornos
muy variados, así como a distintos modelos de robots móviles, traducidos en distintos valores de distancia de
seguridad y radio mínimo de giro. Además, se han representado los límites marcados por la distancia de
seguridad para demostrar que no se incumple en ningún caso, ya que una de las principales señas de identidad
del método es precisamente la seguridad.
La Tabla 5.1 refleja el tiempo invertido en obtener la solución final en cada una de las simulaciones
presentadas, tanto utilizando el algoritmo de Dijkstra como utilizando el de A*. El tiempo mostrado es el
transcurrido desde que se inicia el proceso hasta que se obtiene la curva β-spline propuesta como trayectoria,
es decir, el tiempo de cálculo completo.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
76
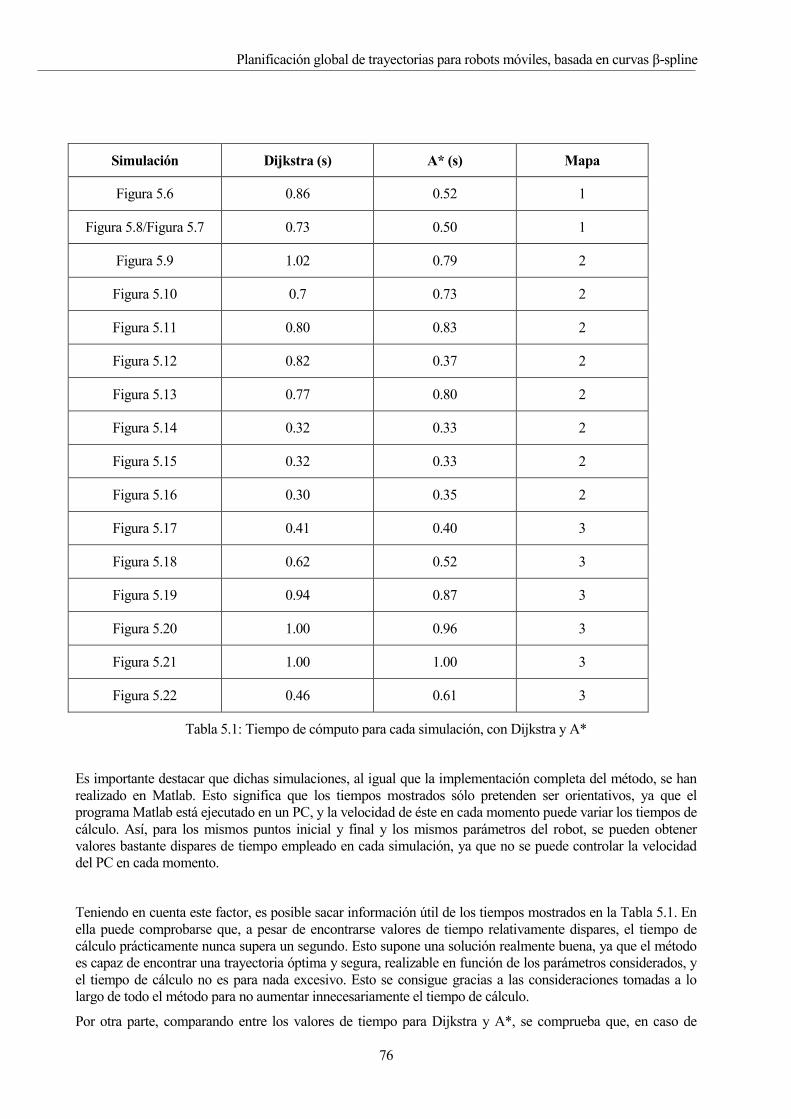
Simulación Dijkstra (s) A* (s) Mapa
Figura 5.6 0.86 0.52 1
Figura 5.8/Figura 5.7 0.73 0.50 1
Figura 5.9 1.02 0.79 2
Figura 5.10 0.7 0.73 2
Figura 5.11 0.80 0.83 2
Figura 5.12 0.82 0.37 2
Figura 5.13 0.77 0.80 2
Figura 5.14 0.32 0.33 2
Figura 5.15 0.32 0.33 2
Figura 5.16 0.30 0.35 2
Figura 5.17 0.41 0.40 3
Figura 5.18 0.62 0.52 3
Figura 5.19 0.94 0.87 3
Figura 5.20 1.00 0.96 3
Figura 5.21 1.00 1.00 3
Figura 5.22 0.46 0.61 3
Tabla 5.1: Tiempo de cómputo para cada simulación, con Dijkstra y A*
Es importante destacar que dichas simulaciones, al igual que la implementación completa del método, se han
realizado en Matlab. Esto significa que los tiempos mostrados sólo pretenden ser orientativos, ya que el
programa Matlab está ejecutado en un PC, y la velocidad de éste en cada momento puede variar los tiempos de
cálculo. Así, para los mismos puntos inicial y final y los mismos parámetros del robot, se pueden obtener
valores bastante dispares de tiempo empleado en cada simulación, ya que no se puede controlar la velocidad
del PC en cada momento.
Teniendo en cuenta este factor, es posible sacar información útil de los tiempos mostrados en la Tabla 5.1. En
ella puede comprobarse que, a pesar de encontrarse valores de tiempo relativamente dispares, el tiempo de
cálculo prácticamente nunca supera un segundo. Esto supone una solución realmente buena, ya que el método
es capaz de encontrar una trayectoria óptima y segura, realizable en función de los parámetros considerados, y
el tiempo de cálculo no es para nada excesivo. Esto se consigue gracias a las consideraciones tomadas a lo
largo de todo el método para no aumentar innecesariamente el tiempo de cálculo.
Por otra parte, comparando entre los valores de tiempo para Dijkstra y A*, se comprueba que, en caso de
77
existir una diferencia de tiempo considerable entre ambos métodos para un mismo caso, generalmente es más
rápido el algoritmo A*. En el único caso de los presentados en el que el algoritmo de Dijkstra es
considerablemente más rápido es en de la Figura 5.22, y esto puede tener una explicación derivada de las
propiedades de cada algoritmo. El algoritmo A* en principio visita menos nodos, ya que orienta la búsqueda
hacia el punto de destino. Sin embargo, es posible que el número de caminos encontrados que no permitan un
suavizado seguro sea mayor con A* que con Dijkstra, lo que provocaría un mayor número de iteraciones y,
por tanto, un mayor tiempo de cómputo. Esto es lo que ha ocurrido en este caso, pero viendo el resto de
simulaciones se comprueba que, cuando hay un método más rápido que el otro, generalmente es el A* el que
encuentra la solución en el menor tiempo.
5.2.3. Trayectorias prohibidas por el suavizado
Por último, se muestran a continuación una serie de situaciones que han sido descartadas por nuestro
algoritmo, al predecirse que el suavizado no era seguro. En el capítulo 4 se comentó que, para prever si el
suavizado de determinado tramo era seguro o no, se consideraba el caso más desfavorable posible, y además
no se hacía distinción entre hacia qué lado se producía el suavizado. El objetivo de este apartado es verificar si
ésta es una suposición aceptable, o si por el contrario prohíbe un gran número de trayectorias que son seguras.
Para ello, se muestran a continuación algunas de las trayectorias descartadas en el proceso de selección del
camino óptimo para las situaciones mostradas en el apartado 5.2.2., y se comprueba si efectivamente dichas
trayectorias iban a provocar una colisión o no.
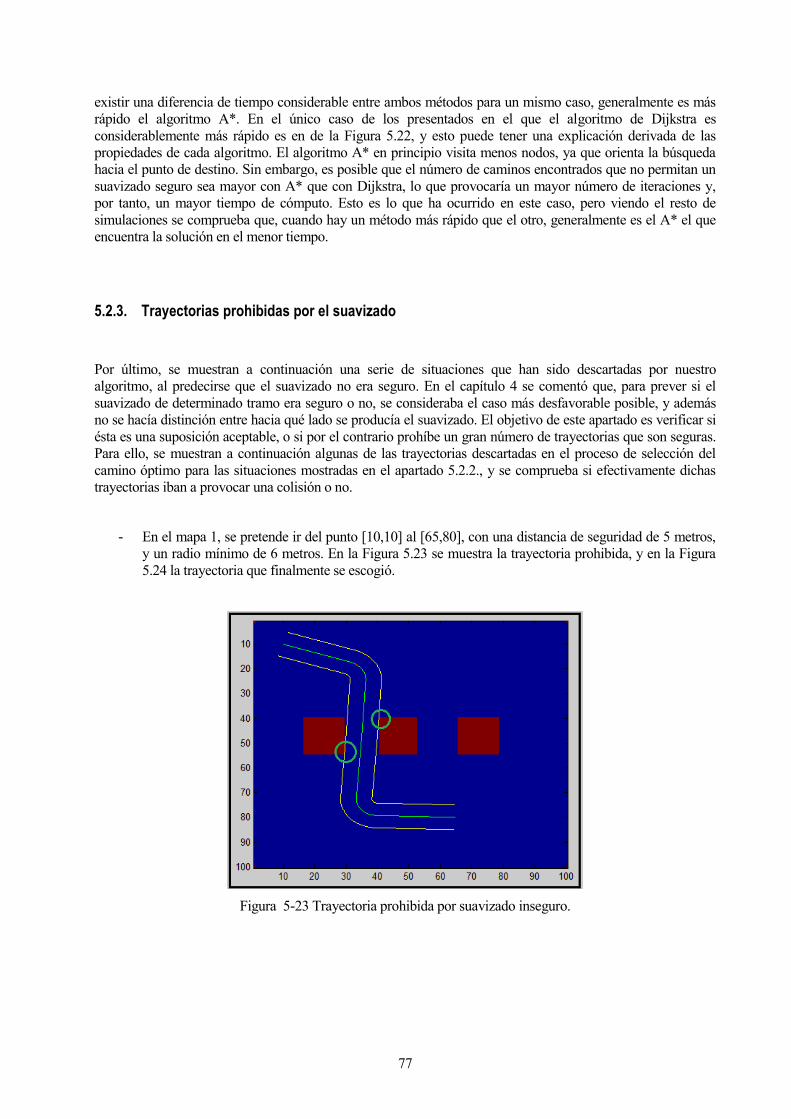
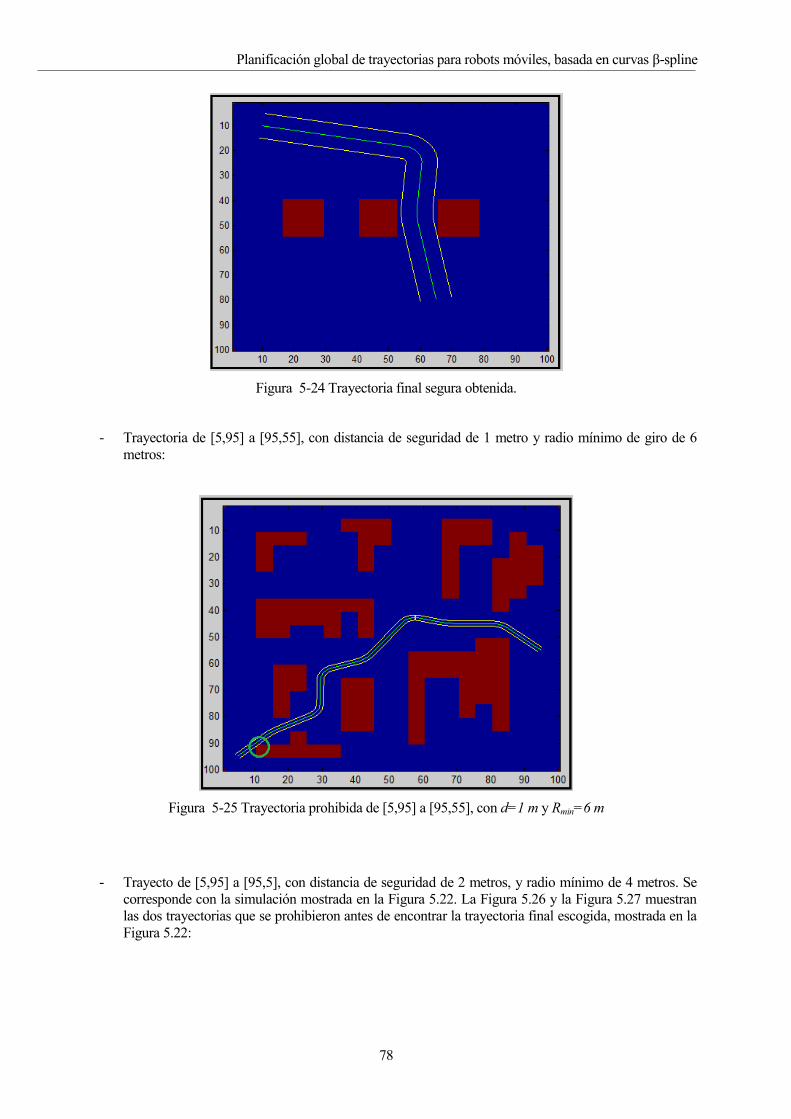
- En el mapa 1, se pretende ir del punto [10,10] al [65,80], con una distancia de seguridad de 5 metros,
y un radio mínimo de 6 metros. En la Figura 5.23 se muestra la trayectoria prohibida, y en la Figura
5.24 la trayectoria que finalmente se escogió.
Figura 5-23 Trayectoria prohibida por suavizado inseguro.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
78
Figura 5-24 Trayectoria final segura obtenida.
- Trayectoria de [5,95] a [95,55], con distancia de seguridad de 1 metro y radio mínimo de giro de 6
metros:
Figura 5-25 Trayectoria prohibida de [5,95] a [95,55], con d=1 m y Rmin=6 m
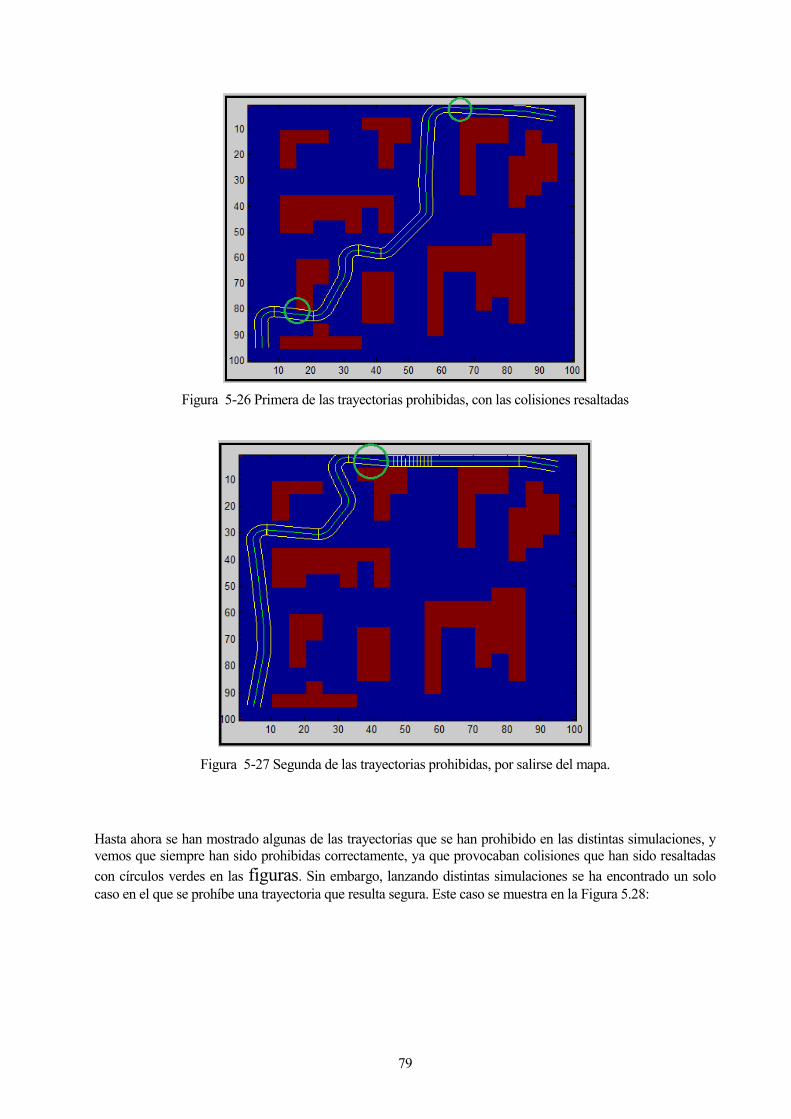
- Trayecto de [5,95] a [95,5], con distancia de seguridad de 2 metros, y radio mínimo de 4 metros. Se
corresponde con la simulación mostrada en la Figura 5.22. La Figura 5.26 y la Figura 5.27 muestran
las dos trayectorias que se prohibieron antes de encontrar la trayectoria final escogida, mostrada en la
Figura 5.22:
79
Figura 5-26 Primera de las trayectorias prohibidas, con las colisiones resaltadas
Figura 5-27 Segunda de las trayectorias prohibidas, por salirse del mapa.
Hasta ahora se han mostrado algunas de las trayectorias que se han prohibido en las distintas simulaciones, y
vemos que siempre han sido prohibidas correctamente, ya que provocaban colisiones que han sido resaltadas
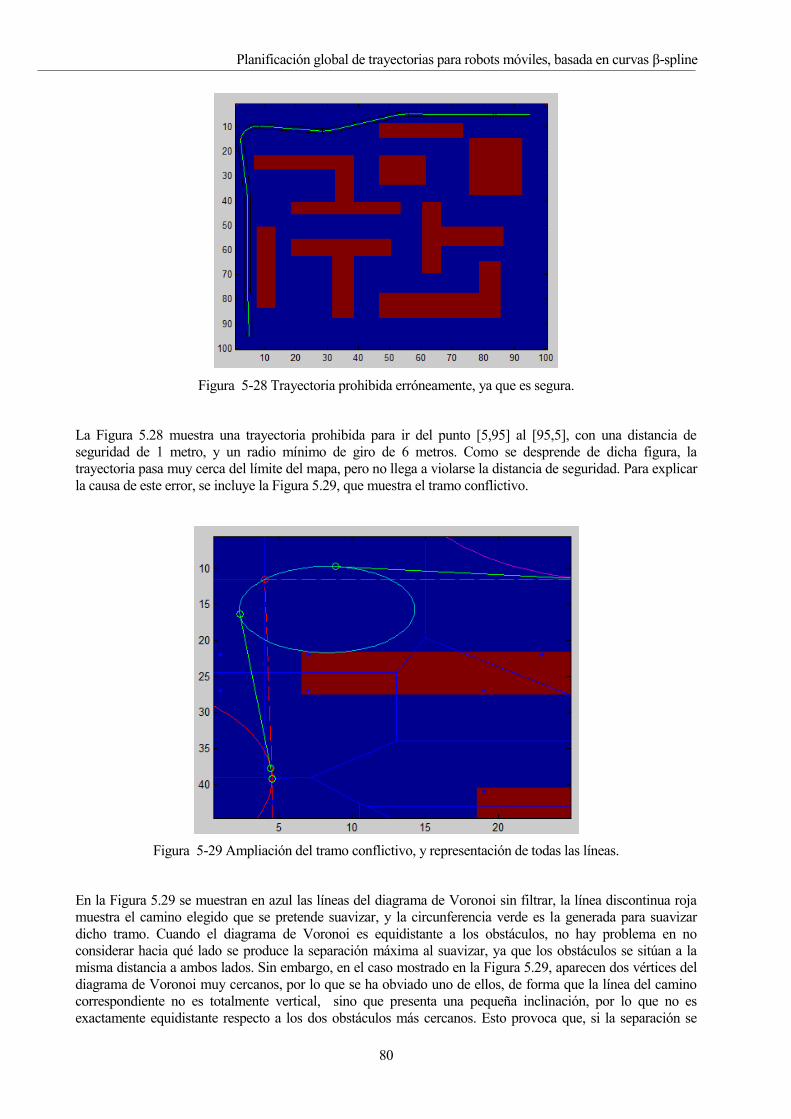
con círculos verdes en las figuras. Sin embargo, lanzando distintas simulaciones se ha encontrado un solo
caso en el que se prohíbe una trayectoria que resulta segura. Este caso se muestra en la Figura 5.28:
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
80
Figura 5-28 Trayectoria prohibida erróneamente, ya que es segura.
La Figura 5.28 muestra una trayectoria prohibida para ir del punto [5,95] al [95,5], con una distancia de
seguridad de 1 metro, y un radio mínimo de giro de 6 metros. Como se desprende de dicha figura, la
trayectoria pasa muy cerca del límite del mapa, pero no llega a violarse la distancia de seguridad. Para explicar
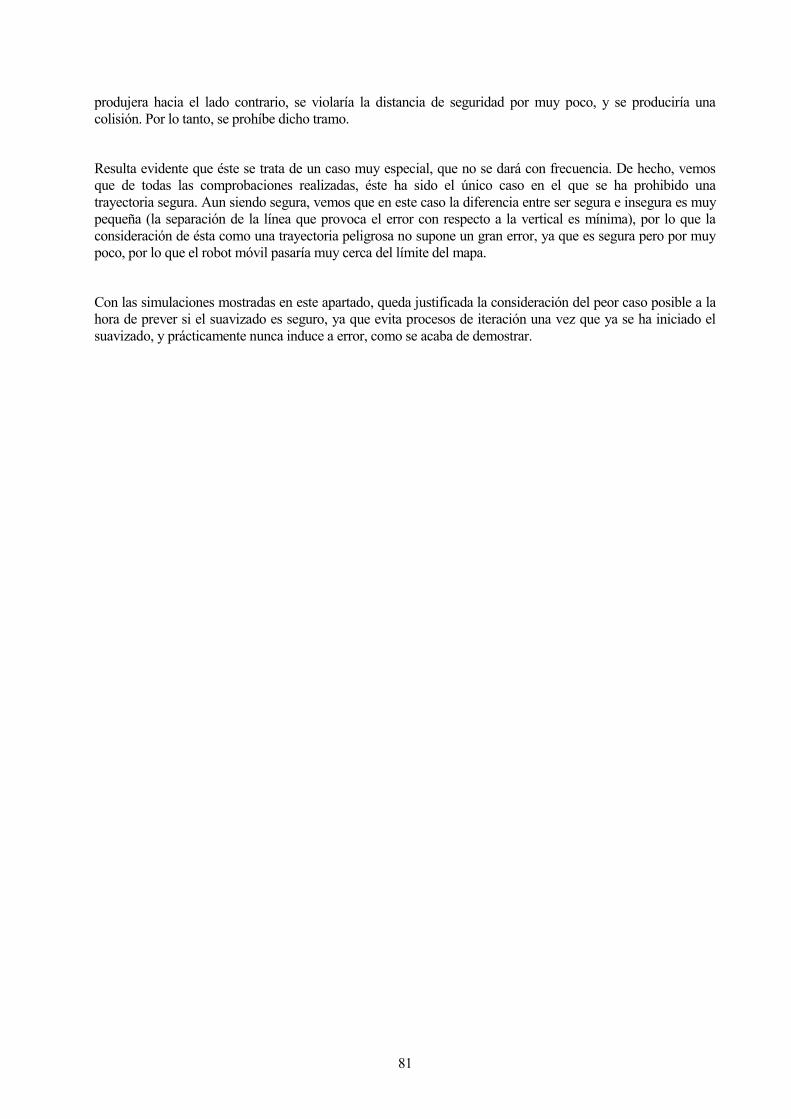
la causa de este error, se incluye la Figura 5.29, que muestra el tramo conflictivo.
Figura 5-29 Ampliación del tramo conflictivo, y representación de todas las líneas.
En la Figura 5.29 se muestran en azul las líneas del diagrama de Voronoi sin filtrar, la línea discontinua roja
muestra el camino elegido que se pretende suavizar, y la circunferencia verde es la generada para suavizar
dicho tramo. Cuando el diagrama de Voronoi es equidistante a los obstáculos, no hay problema en no
considerar hacia qué lado se produce la separación máxima al suavizar, ya que los obstáculos se sitúan a la
misma distancia a ambos lados. Sin embargo, en el caso mostrado en la Figura 5.29, aparecen dos vértices del
diagrama de Voronoi muy cercanos, por lo que se ha obviado uno de ellos, de forma que la línea del camino
correspondiente no es totalmente vertical, sino que presenta una pequeña inclinación, por lo que no es
exactamente equidistante respecto a los dos obstáculos más cercanos. Esto provoca que, si la separación se
81
produjera hacia el lado contrario, se violaría la distancia de seguridad por muy poco, y se produciría una
colisión. Por lo tanto, se prohíbe dicho tramo.
Resulta evidente que éste se trata de un caso muy especial, que no se dará con frecuencia. De hecho, vemos
que de todas las comprobaciones realizadas, éste ha sido el único caso en el que se ha prohibido una
trayectoria segura. Aun siendo segura, vemos que en este caso la diferencia entre ser segura e insegura es muy
pequeña (la separación de la línea que provoca el error con respecto a la vertical es mínima), por lo que la
consideración de ésta como una trayectoria peligrosa no supone un gran error, ya que es segura pero por muy
poco, por lo que el robot móvil pasaría muy cerca del límite del mapa.
Con las simulaciones mostradas en este apartado, queda justificada la consideración del peor caso posible a la
hora de prever si el suavizado es seguro, ya que evita procesos de iteración una vez que ya se ha iniciado el
suavizado, y prácticamente nunca induce a error, como se acaba de demostrar.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
82
83
6 CONCLUSIONES Y TRABAJO FUTURO
lo largo de este trabajo se ha presentado un método para la generación de una trayectoria entre un
punto inicial y otro punto final, conociendo previamente el entorno en dos dimensiones en el que
queremos que se mueva el robot. Como se ha comentado en varias ocasiones a lo largo del trabajo, los
dos pilares sobre los que se cimenta el método son la seguridad y la flexibilidad.
El objetivo de encontrar una trayectoria lo más segura posible se consigue mediante la elección de los
diagramas de Voronoi como herramienta de partida. Sin embargo, tal y como se vio en el capítulo 3, los
programas que generan los diagramas de Voronoi toman como entrada una serie de puntos que definen a los
obstáculos, por lo que se hace necesario un estudio del modelado de los mismos, que se muestra en dicho
capítulo. Una vez seguido el proceso de modelado propuesto, se demuestra que el diagrama de Voronoi
resultante refleja fielmente los puntos del plano equidistantes de los dos obstáculos más cercanos, que era el
objetivo marcado al seleccionar los diagramas de Voronoi como herramienta. Por tanto, las líneas del
diagrama de Voronoi representan un grafo de líneas equidistantes de los obstáculos, y señalan por tanto los
posibles caminos más seguros.
Además, en el capítulo 3 se han mostrado los diagramas de Voronoi resultantes de dos mapas distintos una vez
aplicado el proceso de modelado presentado, donde ambos mapas presentan muy diferente densidad de
obstáculos. Se demuestra así que este método de modelado consigue un diagrama de Voronoi con buenas
características, independientemente de la cantidad de obstáculos que aparezcan en el mapa, siempre que éste
esté representado mediante una matriz de unos y ceros, lo que hace que las aristas de los obstáculos siempre
sean horizontales o verticales.
Además, cabe destacar que las consideraciones tomadas para evitar puntos innecesarios en el modelado de los
obstáculos supone un ahorro del tiempo de computación, ya que en mapas con una cantidad considerable de
obstáculos, la colocación de puntos que no cumplen ninguna función puede aumentar el tiempo de cómputo de
forma importante e innecesaria. Por ello, se ha buscado modelar los obstáculos sólo con los puntos necesarios
para que el diagrama de Voronoi resultante presente buenas características.
Para generar el diagrama de Voronoi sólo se ha utilizado la información del mapa, pero es a la hora de elegir el
camino que une los puntos inicial y final deseados cuando aparecen los parámetros que definen las
restricciones del robot. Así, nuestro programa necesita saber por un lado la distancia de seguridad deseada (que
depende de las dimensiones del robot), y por otro lado la velocidad angular máxima que puede alcanzar el
robot móvil y la velocidad constante a la que queremos movernos. Estas dos últimas características se traducen
en un parámetro de radio mínimo de giro que puede seguir el robot, para la velocidad determinada. Con los
parámetros de distancia de seguridad y radio mínimo de giro conseguimos obtener una secuencia de vértices
del diagrama de Voronoi o waypoints que definan un camino seguro, y que sea posible para el robot móvil
alcanzar todos los waypoints seleccionados.
A
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
84
El siguiente paso es obtener a partir de dicho camino una curva suave que interpole a los waypoints. Para ello
utilizamos las curvas β-spline de tal forma que, situando los vértices del polígono de control con determinada
disposición, conseguimos generar una curva continua en posición, orientación y curvatura, y que teóricamente
no viola las restricciones cinemáticas del robot móvil.
Cabe destacar que la elección de los diagramas de Voronoi como herramienta a partir de la cual obtener el
camino, también es beneficiosa para el posterior suavizado. Por ejemplo, en el caso de los grafos de
visibilidad, la cercanía de los waypoints a los obstáculos deja muy poco margen de maniobra al suavizado, ya
que se podría colisionar con un obstáculo al generar una curva suave que pase por dos vértices consecutivos
del mismo. Además, la estrategia seguida al eliminar puntos del diagrama de Voronoi para poder cumplir las
restricciones cinemáticas del robot se haría más complicada en el caso de los grafos de visibilidad, ya que
obviar un nodo supondría obviar un vértice de un obstáculo, provocando muy probablemente una colisión. Los
grafos de visibilidad presentarían por tanto complicaciones más difíciles de solventar cuando los obstáculos se
encuentran en determinadas configuraciones indeseadas.
En el capítulo 5 se demuestra, mediante la presentación de numerosas simulaciones, que el método presentado
consigue los objetivos marcados. Por un lado, la adecuada generación del diagrama de Voronoi suponía un
buen punto de partida para obtener una trayectoria segura, pero la forma de adaptar el camino según los
parámetros del robot móvil, manteniendo en todo momento la seguridad, se demuestra en el capítulo anterior
que consigue su objetivo de aportar flexibilidad al método. De esta forma, se demuestra que el programa
consigue generar una curva que puede ser seguida perfectamente como trayectoria, para distintos valores de
los parámetros y distintos trayectos. Se muestran además en algunos casos que, para un mismo punto inicial y
un mismo punto final, a veces las trayectorias proporcionadas como solución son distintas al cambiar los
parámetros del robot, ya que una curva que sirve como trayectoria a un robot de determinadas características
no tiene por qué servir para otro robot distinto, definido en última instancia por parámetros distintos. Se
demuestra así que se consigue el objetivo de obtener un planificador de trayectorias que se adapte a las
características del robot que se desee utilizar.
En todas las simulaciones mostradas en el capítulo 5 aparecen la curva generada y la trayectoria seguida al
simularlo con el modelo, y ambas coinciden perfectamente en todos los casos (por eso en todas las imágenes
parece que sólo aparece una curva). Esto ocurre gracias a que las curvas generadas son continuas en posición,
orientación y curvatura, y cumplen las restricciones cinemáticas impuestas por el robot en cuestión, por lo que
pueden ser seguidas por el seguidor de caminos perfectamente. Además, también se representan en todas las
figuras los límites de la distancia de seguridad, para demostrar que no se incumple en ningún caso.
Por otra parte, también se demuestra en el capítulo 5 que la actitud conservadora tomada al considerar el peor
caso posible para prever si al suavizar con la β-spline se producirá una colisión es acertada, ya que sólo en un
caso muy excepcional se prohibió una trayectoria segura. Además, se comprobó que dicha trayectoria era
segura por muy poco, por lo que no suponía un grave error, ya que el método presentado pretende pasar lo más
lejos posible de los obstáculos para maximizar la seguridad en entornos muy poblados de obstáculos. En el
resto de casos, las trayectorias prohibidas por prever un suavizado inseguro siempre han estado bien
prohibidas, como es el caso de los ejemplos mostrados en dicho capítulo 5.
De esta forma, mostrando las simulaciones realizadas en tres mapas muy distintos, y con distintos parámetros
del robot, se demuestra que el método ideado se adapta perfectamente tanto a diferentes entornos en dos
dimensiones, como a robots de distintas características, y acaba proporcionando trayectorias seguras.
Por último, en el capítulo 5 se muestra el tiempo de cómputo invertido desde que comienza el programa hasta
que ya se ha generado la curva β-spline propuesta como trayectoria, tanto para los algoritmos de Dijkstra como
85
A*. No se ha podido realizar un estudio exhaustivo sobre cómo crece el tiempo de cálculo al crecer el número
de obstáculos y la complejidad de los mismos, ya que todas las simulaciones se han realizado en Matlab (al
igual que el programa entero), y el tiempo de cálculo para un mismo caso variaba notablemente de una
simulación a otra, ya que depende en gran medida de la velocidad a la que esté operando el ordenador en cada
momento. Aun así, se pueden sacar algunas conclusiones. Al mirar la tabla 5.1 se comprueba que, de existir
una diferencia de tiempo considerable entre el proceso utilizando Dijkstra o utilizando A*, suele ser el
algoritmo A* el más rápido. En cualquier caso, se recuerda que el tiempo mostrado no corresponde al tiempo
que tardan Dijkstra o A* en encontrar el camino óptimo, sino que incluye todo el proceso de modelado de
obstáculos, generación del diagrama de Voronoi, selección del camino óptimo y suavizado del mismo.
Aunque, como se ha comentado previamente, el valor de los tiempos sea meramente orientativo, se comprueba
que en ningún caso se supera ampliamente el segundo de cálculo. Esto supone un resultado muy positivo, ya
que, por lo general, el proceso completo de planificación a partir de un mapa tarda menos de un segundo de
tiempo de computación. Este poco tiempo de computación se consigue gracias a las consideraciones tenidas en
cuenta a lo largo de todo el proceso, como la precaución de no incluir puntos innecesarios en el modelado de
los obstáculos, o intentar evitar iteraciones entre los procesos de selección de camino y suavizado del mismo,
de forma que se proceda a suavizar un camino cuando estemos seguros de que no va a dar ningún problema.
Queda así demostrado el éxito al conseguir un método que encuentre una trayectoria realizable en la que prime
la seguridad, y que se adapte a las características de un robot concreto.
El método presentado en este trabajo deja abierta la puerta a posibles mejoras. A continuación se proponen
algunos de los posibles trabajos futuros:
- Eliminar la restricción de mapas en dos dimensiones, y hacer el método extensible a planificación de
trayectorias en el espacio. Para ello, sería necesario escoger algún método para obtener los waypoints,
ya sea alguna estrategia análoga a los diagramas de Voronoi pero para tres dimensiones u otra
estrategia alternativa, y definir alguna estrategia para situar los vértices del polígono de control de
forma equidistante.
- Considerar una velocidad no constante en todo el trayecto. Esto podría traducirse en que no existiera
un radio mínimo constante en todo el trayecto, sino que hubiera una restricción de radio mínimo para
cada tramo, dependiendo de la velocidad que se siguiera en el mismo. En cualquier caso, en entornos
muy poblados de obstáculos suele trabajarse con velocidad constante, ya que prima la seguridad por
encima del tiempo empleado en el trayecto, pero se presenta en cualquier caso dicha posibilidad de
ampliación.
- Integrar el método presentado con algún método de planificación local. De esta forma, se podría
reaccionar ante entornos cambiantes u obstáculos inesperados. Gracias a la definición por partes de las
curvas β-spline, se podría generar una trayectoria inicial para alcanzar un punto final y, si durante la
ejecución de la misma el robot detecta algún obstáculo inesperado, sería posible recalcular un tramo
de β-spline alternativo, de forma que se esquivara el nuevo obstáculo y se enlazara de nuevo con la
trayectoria global calculada en primera instancia. Gracias a las propiedades de las curvas β-spline, esto
no supondría recalcular la curva completa, sino sólo el tramo afectado.
Planificación global de trayectorias para robots móviles, basada en curvas β-spline
86
REFERENCIAS
[1] C. Goerzen, Z. Kong, and B. Mettler, “A survey of motion planning algorithms from the perspective of
autonomous uav guidance,” Journal of Intelligent and Robotic Systems, vol. 57, no. 1, pp. 65-100, 2010.
[2] Conde, R., Alejo, D., Cobano, J.A., Viguria, A., and Ollero, A. “Conflict detection and resolution method
for cooperating unmanned aerial vehicles”, Journal of Intelligent & Robotic Systems, 2012.
[3] Prasanna, H.M., Ghosey, D., Bhat, M.S., Bhattacharyya, C., and Umakant, J., “Interpolation-aware
trajectory optimization for a hypersonic vehicle using nonlinear programming”, In AIAA Guidance,
Navigation, and Control Conference and Exhibit, San Francisco, USA, 2005.
[4] Vela, A., Solak, S., Singhose, W., and Clarke, J.P., “A mixed integer program for flight-level assignment
and speed control for conflict resolution”, In Proceedings of the 48th IEEE Conference on Decision and
Control, 5219 –5226, 2009.
[5] Pallottino, L., Feron, E., and Bicchi, A., “Conflict resolution problems for air traffic management systems
solved with mixed integer programming”, Intelligent Transportation Systems, IEEE Transactions on, 3(1), 3–
11, 2002.
[6] Geiger, B., “Unmanned Aerial Vehicle Trajectory Planning with direct methods”, Ph.D. thesis, The
Pennsylvania State University, Pennsylvania, USA, 2009.
[7] Alejo, D., Cobano, J. A., Heredia, G., and Ollero, A., “Conflict-free 4D Trajectory Planning in Unmanned
Aerial Vehicles for Assembly and Structure Construction”, Journal Intelligent and Robotic Systems, Vol. 73,
pp. 783-795, 2014.
[8] Lavalle, S.M., ”Rapidly-exploring random trees: A new tool for path planning”, In Computer Science
Dept, Iowa State University, Tech. Rep. TR: 9811, 1998.
[9] Xue, M. y Atkins, E.M., “Terminal area trajectory optimization using simulated annealing”, In 44th AIAA
Aerospace Sciences Meeting and Exhibit. Reno, Nevada, USA, 2006.
[10] Durand, N. and Alliot, J., “Ant colony optimization for air traffic conflict resolution”, In Proceedings of
the Eighth USA/Europe Air Traffic Management Research and Development Seminar (ATM2009). Napa,
(CA, USA), 2009.
[11] Foskey, .M, Garber, M., Lin, M., and Manocha, D., “A voronoi-based hybrid motion planner”, In
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2001.
87
[12] Rao, N., Stoltzfus, N., and Iyengar, S. S., “A retraction method for learned navigation in unknown terrains
for a circular robot”, IEEE Transactions on Robotics and Automation, 7(5), October 1991.
[13] Algorithms and more. http://jariasf.wordpress.com/2013/01/01/camino-mas-corto-algoritmo-de-bellman-