

Resistencia de materiales
1
1.6 ESFUERZO
En la sección anterior se mostró cómo aparece la distribución de fuerzas internas
en un cuerpo al cual se le hace un corte imaginario. Cualquiera de las dos partes
que se tome del cuerpo tiene que estar en equilibrio estático; sin embargo, no es
posible considerar las innumerables fuerzas individuales sobre las partículas que
aparecen en la sección expuesta.
No obstante, las fuerzas internas que actúan en diferentes puntos de la sección
expuesta se pueden describir en función de una cierta cantidad denominada
esfuerzo.
1.6.1 Definición de esfuerzo
El esfuerzo se define para un punto sobre la superficie expuesta del cuerpo al
hacer el corte imaginario, por ejemplo, para el punto Q de la Fig. 1.31.
En la Fig. 1.32, A es el pequeño elemento de área, sobre el cual actúa una
fuerza pequeña F con una dirección única, establecida en un sistema de
coordenadas X, Y, Z. Esta fuerza se puede resolver en sus componentesFn y
Ft.
Cuando A tiende a cero, igualmente F tiende a cero, pero el cociente de la
fuerza y el área tiende a un límite finito, este cociente se llama esfuerzo y
describe la intensidad de la fuerza interna sobre un área específica.
Esfuerzo Normal: La intensidad de la fuerza, o fuerza por unidad de área, que
actúa normal a A, se define como esfuerzo normal ().
Matemáticamente se puede expresar:
A
FnLim
0A
Ecuación 1-2
Fig. 1-31
Diagrama de cuerpo libre
de una parte de un elemento
estructural o mecánico.
Fig. 1-32 Elemento de área de la sección
expuesta.
(b) (a)
Resistencia de materiales
2
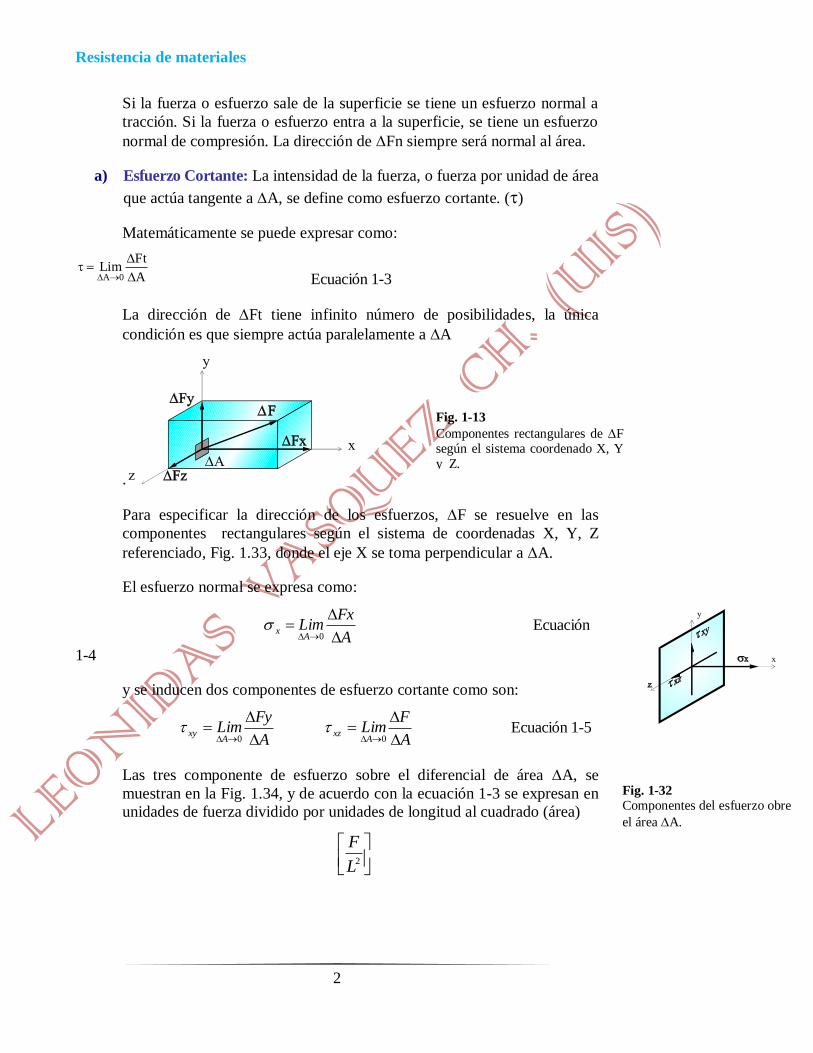
Si la fuerza o esfuerzo sale de la superficie se tiene un esfuerzo normal a
tracción. Si la fuerza o esfuerzo entra a la superficie, se tiene un esfuerzo
normal de compresión. La dirección de Fn siempre será normal al área.
a) Esfuerzo Cortante: La intensidad de la fuerza, o fuerza por unidad de área
que actúa tangente a A, se define como esfuerzo cortante. ()
Matemáticamente se puede expresar como:
A
FtLim
0A
Ecuación 1-3
La dirección de Ft tiene infinito número de posibilidades, la única
condición es que siempre actúa paralelamente a A
.
Para especificar la dirección de los esfuerzos, F se resuelve en las
componentes rectangulares según el sistema de coordenadas X, Y, Z
referenciado, Fig. 1.33, donde el eje X se toma perpendicular a A.
El esfuerzo normal se expresa como:
A
FxLim
Ax
0 Ecuación
1-4
y se inducen dos componentes de esfuerzo cortante como son:
A
FLim
A
FyLim
Axz
Axy
00 Ecuación 1-5
Las tres componente de esfuerzo sobre el diferencial de área A, se
muestran en la Fig. 1.34, y de acuerdo con la ecuación 1-3 se expresan en
unidades de fuerza dividido por unidades de longitud al cuadrado (área)
2L
F
Fig. 1-13
Componentes rectangulares de F según el sistema coordenado X, Y
y Z.
Fig. 1-32
Componentes del esfuerzo obre
el área A.

Resistencia de materiales
3
Unidades de Esfuerzos:
La aplicación de los principios de la Resistencia de Materiales en los cálculos de
Ingeniería requiere la manipulación de varios sistemas de unidades y es de gran
importancia asegurar que se utilicen unidades consistentes en los modelos
matemáticos utilizados para el cálculo.
Aunque la norma ICONTEC establece el Sistema Internacional como sistema
básico de unidades en Colombia, es importante aclarar que las empresas
suministradoras de materiales para ingeniería continúan utilizando el sistema
métrico técnico y el anglosajón, lo que implica la necesidad de conocer y utilizar
estos sistemas de unidades.
Las tablas 1.2, 1.3 y 1.4 muestran las unidades en los tres sistemas.
Tabla 1-2 Dimensiones básicas en el Sistema Internacional de unidades (S.I.)
Magnitud Unidad Otras unidades derivadas
Longitud
Tiempo
Fuerza
Temperatura
Angulo
Esfuerzo
Metro (m)
Segundo (s)
Newton (N)
Kelvin (K)
Radian
Pascal (Pa)2m
N
Milímetro (mm) 1mm = 10m-3
Minuto (min); hora (h)
2s
mKg
Grados Celsius (°C)
Grado
Mpa = 106 Pa
Tabla 1-3 Dimensiones básicas en el Sistema de unidades Anglosajonas
Magnitud Unidad
Anglosajona
Otras unidades Anglosajonas
Longitud
Tiempo
Fuerza
Temperatura
Angulo
Esfuerzo
Pie (ft)
Segundo (s)
Libra (Lb)
Fahrenheit (°F)
Grados
2pul
Lb
(psi)
Pulgada (pulg); 1 pie = 12 pulg
Minuto (min); hora (h)
Kip: 1 Kip =103 Lb
Radián
Ksi: 1 Ksi = 103 Lb/pulg
2 o (psi)

Resistencia de materiales
4
Tabla 1-4 Dimensiones básicas en el Sistema Métrico Técnico
Magnitud Unidad Otras unidades derivadas
Longitud
Tiempo
Fuerza
Temperatura
Angulo
Esfuerzo
Metro (m), cm.
Segundo (s)
Kilogramo (Kg)
Kelvin (K)
Radian
2cm
Kg
Milímetro (mm) 1mm = 10m-3
Minuto (min); hora (h)
gr.
Grados Celsius (°C)
Grado
Kg/cm²
La tabla 1.5 muestra los distintos factores de conversión entre las unidades de
esfuerzos de estos tres sistemas.
Tabla 1-5 Factores de conversión entre las unidades de esfuerzo
Unidad Pa Kg/cm2
P.S.I
Pa
Kg/cm2
P.S.I
1
9 810
6 912
1,019 x 10-5
1
0,0705
1,45 x 10-5
14,2
1
Tabla 1.6 Prefijos de unidades en el Sistema Internacional
Prefijos de unidades en
el Sistema
Internacional
Símbolo Cantidades
Giga
Mega
Kilo
Centi
Mili
Micro
G
M
K
cm
m
109 = 1 000 000 000
106 = 1 000 000
103 = 1 000
10-²
= 0,01
10-3
= 0,001
10-6
= 0,000001

Resistencia de materiales
5
Relación entre las componentes del esfuerzo y las cargas internas.
En una sección expuesta de un cuerpo las componentes de los esfuerzos están
relacionados con las cargas internas que actúan sobre la sección. Las relaciones
entre las componentes de esfuerzo y las cargas internas se establecen utilizando el
cálculo integral.
Anteriormente se establecieron las componentes de los esfuerzos que actúan en
un área A. (Fig. 1.35).
Toda la sección expuesta se puede dividir en áreas A sobre las cuales actúan
fuerzas internas F, que varían en magnitud y dirección. Las componentes de F
(Fig.1.36) se pueden expresar según las expresiones matemáticas siguientes:
AFzAFyAFx xzxyx
Si A tiende a cero se tiene un diferencial de área dA y las fuerzas internas que
actúan en la sección expuesta del elemento estructural se pueden expresar como
sigue:
Fig. 1-33 Componentes de
esfuerzo en un área A para una sección expuesta de un elemento
estructural.
Fig. 1-36 Componentes de la
fuerza F que actúa en un área
A.

Resistencia de materiales
6
A
x0
A
xz
A
x0
A
xy
A
0xy0xz
A
x
dAyMzdAVy
dAzMydAVy
dA)zy(TxdANx
1.6.2 Estado general de esfuerzos.
Las componentes de los esfuerzos presentados en la sección anterior se
establecieron para un plano imaginario que corta el elemento estructural. Este
plano es paralelo al plano yz del sistema de coordenada x,y,z, referenciado.
Sin embargo, a través de un punto cualquiera de un cuerpo puede pasar un
infinito número de planos imaginarios, con diferentes orientaciones. Si se
establece un corte imaginario por medio de un plano paralelo al plano xy del
sistema de coordenadas referenciado, un área A queda sometida a las
componentes de esfuerzo mostrados en la Fig. 1.37.
Al pasar un plano imaginario por el cuerpo paralelo al plano xz del sistema de
coordenadas referenciado, un área A queda sometida a las componentes de
esfuerzos mostrados en la Fig. 1.38
Para facilitar la observación del estado general de esfuerzos en un punto
cualquiera de un cuerpo se considera un pequeño cubo de lado a , Fig. 1.39,
donde se muestran las componentes de los esfuerzos en cada una de las tres caras;
frontal, superior y lateral derecha.
Obviamente por razones de equilibrio, las caras opuestas a las anteriores llevarán
los mismos esfuerzos correspondientes pero en dirección contraria; los cuales no
están representados en la Fig. 1.39, por razones de claridad en el dibujo.
Para establecer una convención de signos, y una nomenclatura coherente se
procede de la siguiente manera:
Cualquier plano recibe el nombre del semieje al cual es perpendicular. De este
modo se tienen las caras positivas: X,Y,Z y caras negativas: -X, -Y, -Z. Fig. 1.40
(a) y (b).
Los esfuerzos se designan por una letra griega y dos subíndices; el primer
subíndice corresponde al nombre de la cara sobre la cual actúa el esfuerzo y el
segundo corresponde a la dirección en que va dirigido dicho esfuerzo. Se utilizará
la letra griega para los esfuerzos normales y para los esfuerzos cortantes. Así
por ejemplo se tendrá que xy es un esfuerzo cortante que actúa en la cara X
(primer subíndice) y lleva la dirección Y (segundo subíndice) Fig. 1.39; zz es un
esfuerzo normal que actúa en la cara Z y lleva la dirección Z. Como para los
Fig. 1-37 Componentes de
esfuerzo en un área A para una sección expuesta al plano
XY.
Fig. 1-34 Componentes de
esfuerzo en un área A para una sección expuesta al plano
XZ.
Fig. 1-35 Estado de esfuerzos
en un plano cualquiera del
elemento estructural.

Resistencia de materiales
7
esfuerzos normales, siempre van a coincidir, los dos subíndices, bastará con
colocarlo una sola vez, así se tendrá siempre x, y y z Fig. 1.39.
El signo de los esfuerzos normales se considera positivo si actúan a tracción y
negativo si actúan a compresión.
Respecto a los esfuerzos cortantes, se consideran positivos, si actuando en una
cara positiva, el sentido del esfuerzo va en el mismo sentido de los semiejes X, Y,
Z, o si actuando en una cara negativa, el sentido del esfuerzo va en el sentido de
los semiejes -X, -Y, -Z. Se consideran negativos, si actuando en una cara
positiva, el sentido del esfuerzo va en el mismo sentido de los semiejes negativos
-X, -Y, -Z y viceversa. Es decir, se asume algo similar al producto de signos
algebraicos (+) x (+) = (+) ; (+) x (-) = (-) ; (-) x (-) = (+); Fig. 1.41.
Fig. 1.41 ejemplo de los signos en los esfuerzos cortantes
En resumen, el estado más general de esfuerzos que pueda existir en un punto de
un elemento sometido a un estado general de cargas, será similar al mostrado en
la Fig. 1.39, y comprenderá tres esfuerzos normales x, y y z, y seis esfuerzos
cortantes: xy, yx, yz, zy, xz, zx.
Es interesante resaltar la diferencia notable que existe entre el estado de fuerzas
en un punto y el estado de esfuerzos. Mientras que la fuerza en un punto queda
completamente definida por las tres componentes rectangulares y puede
representarse como un vector columna:
Fz
Fy
Fx
El estado general de esfuerzos queda definido por sus nueve componentes y se
(a)
(b)
Fig. 1-40 denominación de
planos

Resistencia de materiales
8
representa matricialmente como sigue:
zzyzx
yzyyx
xzxyx
σττ
τστ
ττσ
La cual se conoce como la representación matricial del tensor esfuerzo. Tal tensor
es de segundo orden.
Es importante establecer las relaciones que se presentan dentro de las
componentes de los esfuerzos cortantes, para lo cual se mira el diagrama de
cuerpo libre del cubo mostrado en la Fig. 1.39, utilizando una proyección en el
plano xy, Fig. 1.42.
Las fuerzas normales y cortantes que actúan en las diferentes caras de cubo, se
obtienen multiplicando las correspondientes componentes de esfuerzos por el
área (a)2 de cada cara.
Las únicas fuerzas con momentos con respecto al eje z diferentes de cero, son las
fuerzas cortantes.
Estas fuerzas forman dos pares, uno en sentido contrario al movimiento de las
agujas del reloj (positivo) xy(a)2a, el otro en el mismo sentido del movimiento
de las agujas del reloj (negativo), -yx(a)2a.
Expresándolo matemáticamente se tiene:
0axaxaxax 0M2
yx2
xyz
de donde se concluye que:
yxxy
Ecuación 1-6
Análogamente, haciendo diagramas de cuerpo libre proyectados a los planos xz,
yz, se deducen las relaciones siguientes:
zxxzzyyz Ecuación 1-7
También se puede observar que un esfuerzo cortante, en un punto cualquiera, no
puede actuar en un solo plano; un esfuerzo cortante igual debe actuar en un plano
ortogonal (perpendicular al primero). Es decir si existe xy entonces
necesariamente existirá yx, etc.
Fig. 1-42 Diagrama de
cuerpo libre del estado
de esfuerzos proyectado
en el plano XY.

Resistencia de materiales
9
1.7 DEFORMACIONES
Toda carga externa que actúa en un cuerpo, produce cambios en la posición de los infinitos
puntos de éste. Los cambios de posición de los puntos se llaman desplazamientos. Si los
desplazamientos son tales que la distancia entre dos puntos específicos del cuerpo no
cambia, éste ha sido sometido a un desplazamiento de cuerpo rígido. Esta clase de
desplazamiento implica la traslación y la rotación del elemento como un todo, sin ningún
cambio de forma. Por otra parte, si los desplazamientos generan variación en la distancia
entre dos puntos específicos del cuerpo, entonces la forma de este cambia y se dice que el
elemento estructural está sometido a deformación. La deformación puede ser visible o
prácticamente inadvertida si no se cuenta con equipo adecuado para hacer mediciones
precisas. Pero, por lo general, las deformaciones pueden implicar desarreglos muy
complicados y para someterlos a medición, es necesario hacer una simplificación, que
consiste en descomponer las deformaciones en deformaciones longitudinales y
deformaciones angulares.
En la Fig.. 1.43, X, Y y O representan respectivamente las longitudes de los segmentos
de recta, OA y OB, y la localización del punto O en el elemento no deformado. Asimismo
X', Y' y O' representan, respectivamente, las longitudes de los segmentos y la
localización del punto en el cuerpo que ha cambiado de posición y se ha deformado.
Cuando el cuerpo cambia de posición, el punto O sufre un desplazamiento (O) hasta O' y
si se deforma los segmentos se alargan o se contraen hasta las nuevas longitudes X' y Y',
y rotan los ángulos y , tal como se indica en la Fig.1.43. Los segmentos X' y Y'
realmente pueden ser curvos pero si sus longitudes son suficientemente pequeñas, se
pueden representar como segmentos de recta.
La deformación longitudinal se define como el cambio de longitud de un segmento de recta
que determina la distancia entre dos puntos específicos de un cuerpo; para los segmentos de
recta OA y OB, la deformación longitudinal se define como:
Fig. 1-43 Elementos lineales en un punto en
estado no deformado y deformado.

Resistencia de materiales
10
yyyxx yx ''
Ecuación 1-8
1.7.1 Deformación unitaria Lineal.
La deformación unitaria se define como el cambio de longitud por unidad de longitud de
un segmento de recta que define la distancia entre dos puntos específicos de un cuerpo;
para el segmento de recta OA, la deformación unitaria se define como:
dx
dx'dx
x
x'xLim
dx
x
x
x
xx
x
Ecuación 1-9
Análogamente la deformación unitaria para el segmento OB se define como:
dy
dy'dy
y
y'yLim
dy
y
y
y
yy
y
Ecuación
1-10
Las cantidades x y y se denominan deformaciones unitarias, llamadas también
deformaciones unitarias lineales, en el punto O, en las direcciones X y Y respectivamente.
Representa el cambio de longitud por unidad de longitud de un segmento infinitesimal de
recta. Es una cantidad adimensional, pero basados en los sistemas de unidades se le asignan
unidades de pulg/pulg, m/m, etc.
1.7.2 Deformación Unitaria cortante.
La deformación unitaria cortante se relaciona con el cambio de ángulo que ocurre entre los
dos segmentos de recta OA y OB, perpendiculares entre sí en el cuerpo no deformado.
En la Fig. 1-43 la deformación unitaria cortante entre los segmentos OA y OB se designa
por xy y se define como el cambio en el ángulo recto entre dichos segmentos cuando el
elemento se deforma y se expresa como:
xy Ecuación 1-1
La deformación unitaria cortante se mide en radianes y es una cantidad adimensional. Se le
puede considerar positiva si el ángulo recto original disminuye, y negativa si el ángulo recto
original aumenta.







